74
SIMULASI ORBIT PLANET DALAM TATA SURYA DENGAN METODE EULER,
LEAPFROG DAN RUNGE-KUTTA
Suraina1), Yudha Arman1), Boni Pahlanop Lapanporo1)
1)
Jurusan Fisika Fakultas Matematika Dan Ilmu Pengetahuan Alam Universitas Tanjungpura Pontianak
*Email : [email protected]
Abstrak
Telah dilakukan simulasi gerak planet yang saling berinteraksi satu sama lain dan berinteraksi dengan matahari. Simulasi ini bertujuan untuk mengetahui perbandingan hasil integrasi gerak planet dalam tata surya dengan metode Euler, Leapfrog dan Runge-Kutta orde 4. Dari pemodelan yang telah dilakukan terlihat bahwa lintasan orbit planet hasil simulasi metode Leapfrog lebih presisi dari pada metode Euler dan Runge Kutta orde 4. Error energi total dari metode Leapfrog juga lebih kecil yaitu -0,1371. Sedangkan error energi total dari metode Euler dan Runge-Kutta orde 4 berturut-turut adalah sebesar -0,1429 dan -0,1442.
Kata kunci : Persamaan dinamika Newton, model gerak planet, energi total
1. Pendahuluan
Dalam pandangan heliosentris
planet-planet cenderung bergerak mengelilingi
matahari. Lintasan planet mengelilingi matahari sebenarnya adalah elips sebagaimana yang dikemukakan oleh seorang ahli matematika dan astronomi dari Jerman bernama Johanes Kepler (1571-1630). Ia juga menunjukkan bahwa planet tidak bergerak dengan kelajuan konstan tetapi bergerak lebih cepat ketika berada dekat dengan matahari. Lintasan dan gerak planet di dalam tata surya dijelaskan dalam tiga hukum Kepler. Ketiga hukum tentang gerak planet tersebut adalah : pertama, semua planet bergerak dalam orbit ellips dengan matahari berada di salah satu fokusnya. Kedua, garis yang menghubungkan tiap planet ke matahari menyapu luasan yang sama dalam waktu yang sama. Ketiga, kuadrat periode tiap planet sebanding dengan pangkat tiga jarak rata-rata planet terhadap matahari (Tipler, 1998).
Pada era modern, hukum Kepler digunakan untuk mengaproksimasi orbit satelit dan benda-benda yang mengorbit matahari seperti planet luar dan asteroid. Hukum-hukum ini pada dasarnya menjabarkan gerakan dua benda yang saling mengorbit satu sama lain.
Kajian tentang lintasan dan gerak planet dapat disimulasikan dengan metode komputasi. Simulasi ini akan menggambarkan bagaimana gerak yang dihasilkan oleh planet meliputi kecepatan dan posisi setiap saat yang dialami oleh planet. Salah satu hal yang menarik dari simulasi tersebut adalah membandingkan model gerak planet dengan berbagai metode serta
menganalisis aplikasi metode tersebut dalam simulasi delapan planet yang saling berinteraksi satu sama lain dan dengan matahari.
Simulasi ini bertujuan untuk mengetahui perbandingan hasil integrasi gerak planet dalam tata surya dengan metode Euler, Leapfrog dan Runge-Kutta orde 4. Simulasi ini dapat digunakan untuk mengetahui profil dari gerak planet melalui analisis solusi numerik yang didapatkan dengan ketiga metode tersebut serta dapat memberikan informasi mengenai metode
terbaik yang dapat digunakan untuk
menyelesaikan model gerak planet.
2. Metodologi
2.1 Model Gerak Planet
Kajian simulasi orbit planet dalam tata surya dengan metode Euler, Leapfrog dan Runge-Kutta orde 4 tidak lepas dari analisis dan perhitungan persamaan differensial biasa. Persamaan yang digunakan dalam penelitian ini adalah persamaan dinamika Newton untuk interaksi delapan buah planet dan matahari yang dituliskan sebagai berikut :
3 3 3 3 3 3 3 3 m m b v v b x b b bm bv j j b r r b s s b br bj bs u u b n n b bu bn Gm x x Gm x x dv GMx dt r r r Gm x x Gm x x Gm x x r r r Gm x x Gm x x r r (1) dan75
3 3 3 3 3 3 3 3 y b m m b v v b b bm bv j j b r r b s s b br bj bs u u b n n b bu bn dv GMy Gm y y Gm y y dt r r r Gm y y Gm y y Gm y y r r r Gm y y Gm y y r r (2)dimana M adalah massa matahari, mm massa
merkurius, mv massa venus, mr massa mars, mj
massa jupiter, ms massa saturnus, mu massa
uranus, mn massa neptunus, sedangkan G adalah
konstanta gravitasi.
Persamaan (1) dan (2) merupakan persamaan gerak planet bumi dalam komponen x dan y yang akan diselesaikan secara numerik. Untuk persamaan gerak planet yang lain, variabel xb dan yb digantikan dengan variable x
dan y yang bersesuaian. Jarak antara dua planet
dapat dihitung menggunakan persamaan
berikut :
12 1 2 1 2 2 2 r x x y y (3)dengan x1 dan y1 merupakan posisi planet 1 pada
bidang x dan y, x2 dan y2 merupakan posisi
planet 2 pada bidang x dan y. Untuk memudahkan perhitungan batas awal yang
digunakan adalah
y
00
danx
0
r
, dimanay0 dan x0 merupakan posisi awal planet dalam
arah x dan y, sedangkan r merupakan jarak rata-rata planet dengan matahari. Berikut data planet yang digunakan dalam simulasi ini yang meliputi data jarak rata-rata planet ke matahari dan periode setiap planet.
Tabel 1. Data planet yang digunakan dalam hukum III Kepler
Planet Jarak rata-rata dari matahari (AU) Periode (Earth Years) Merkurius 0,387 0,241 Venus 0,723 0,615 Bumi 1,0 1,0 Mars 1,523 1,88 Jupiter 5,202 11,86 Saturnus 9,539 29,5 Uranus 19,18 84,0 Neptunus 30,06 165 (Gould, 1938) 2.2 Metode Euler
Metode euler merupakan metode yang paling sederhana untuk menyelesaikan masalah nilai awal (Sahid, 2004). Kondisi atau syarat atau nilai awal (x0, y0) digunakan untuk menghitung
besarnya slope (atau tangent arah) y(x) pada x = x0. Prinsip metode euler adalah hampiran
kurva penyelesaian di sekitar yi dengan garis
yang melalui (xi, yi). Hampiran selanjutnya di yi+1
adalah absis titik pada garis hampiran tersebut yang memiliki absis yi+1.
Metode Euler digunakan untuk
menyelesaikan persamaan (1) dan (2), sehingga: kecepatan dalam arah x,
3 3 3 3 3 3 3 1 3 , , ( ) m m b i i b x b x b b bm v v b r r b bv br j j b s s b bj bs u u b n n b bu bn Gm x x GMx v v r r Gm x x Gm x x r r Gm x x Gm x x r r Gm x x Gm x x r r (4) posisi dalam arah x,1 1 , i i i b b x b
x
x
v
t
(5) kecepatan dalam arah y,
3 3 3 3 3 3 3 1 y, y, 3 ( ) m m b i i b b b b bm v v b r r b bv br j j b s s b bj bs u u b n n b bu bn Gm y y GMy v v r r Gm y y Gm y x r r Gm y y Gm y y r r Gm y y Gm y y r r (6)posisi dalam arah y,
1 1 y, i i i b b b
y
y
v
t
(7) 2.3 Metode LeapfrogIntegrator leapfrog merupakan salah satu contoh integrator symplectic. Dalam integrator leapfrog terdapat dua operator utama untuk memisahkan energi potensial dan energi kinetik pada persamaan Hamiltonian, yaitu operator
drift dan kick (Dehnen dan Read, 2011).
Algoritma Leapfrog yang bersesuaian dengan persamaan (1) dan (2) dituliskan sebagai berikut
kecepatan dalam arah x,
3 3 3 3 3 3 3 3 1 , , 2 m m b b b bm v v b r r b bv br i i x b x b j j b s s b bj bs u u b n n b bu bn Gm x x GMx r r Gm x x Gm x x r r v v t Gm x x Gm x x r r Gm x x Gm x x r r (8)posisi dalam arah x,
1 1 , i i i b b x b x x v t
(9)
76
kecepatan dalam arah y,
3 1 y, y, 3 3 3 3 3 3 3 2 m m b b b bm v v b r r b bv br i i b b j j b s s b bj bs u u b n n b bu bn Gm y y GMy r r Gm y y Gm y x r r v v t Gm y y Gm y y r r Gm y y Gm y y r r 10)posisi dalam arah y,
1 1 y, i i i b b b y y vt
(11) 2.4 Metode Runge-Kutta
Metode Runge Kutta merupakan suatu metode yang digunakan untuk menyelesaikan persamaan diferensial secara numerik atau
pendekatan sehingga mendapatkan
penyelesaian yang lebih signifikan daripada penyelesaian secara analitik. Metode Runge
Kutta merupakan salah satu algoritma
pemecahan diferensial dengan prinsip deret Taylor. Metode ini mencapai keakuratan dari suatu pendekatan Taylor tanpa memerlukan turunan-turunan tingkat tinggi (Matthew dan Fink, 2004).
Metode Runge-Kutta dibuat untuk
mendapatkan ketelitian yang lebih tinggi dan kelebihan dari metode ini adalah bahwa untuk
memperoleh hasil-hasil tersebut hanya
diperlukan nilai-nilai fungsi di titik-titik sembarang yang dipilih pada suatu interval bagian (Wahyudin, 1987). Pada metode Runge Kutta, semakin tinggi ordenya semakin tinggi pula tingkat ketelitian yang akan didapatkan. Di sisi lain, parameter yang diperlukan juga akan lebih banyak. Pada umumnya, penyelesaian persamaan diferensial biasa akan menggunakan metode Runge Kutta orde-4. Runge Kutta orde-4
membutuhkan satu nilai awal untuk
memulainya (y0) dan potongan dari empat
perhitungan deret Taylor (Suparno, 2008). Metode Runge Kutta orde 4 juga digunakan untuk menyelesaikan persamaan (1) dan (2), sehingga
kecepatan dalam arah x,
1 3
1 2 2 4 1 6 2 i i x x v v k k k k t (12) posisi dalam arah x,1 1 i i i x x x v t (13) dengan a.
1 3 3 3 3 3 3 3 3 m m b v v b r r b b b bm bv br j j b s s b u u b n n b bj bs bu bn Gm x x Gm x x Gm x x GMx k r r r r Gm x x Gm x x Gm x x Gm x x r r r r b.
3 3 3 3 3 3 3 2 1 3 ( ) 0.5 m m b v v b b b bm bv j j b r r b s s b br bj bs u u b n n b bu bn Gm x x Gm x x GMx k r r r Gm x x Gm x x Gm x x r r r Gm x x Gm x x k t r r c.
3 3 3 3 3 3 3 3 3 2 ( ) 0.5 m m b v v b b b bm bv j j b r r b s s b br bj bs u u b n n b bu bn Gm x x Gm x x GMx k r r r Gm x x Gm x x Gm x x r r r Gm x x Gm x x k t r r d.
4 3 3 3 3 3 3 3 3 3 ( ) m m b v v b b b bm bv j j b r r b s s b br bj bs u u b n n b bu bn Gm x x Gm x x GMx k r r r Gm x x Gm x x Gm x x r r r Gm x x Gm x x k t r r kecepatan dalam arah y,
1 3 1 2 2 4 1 6 2 i i y y v v k k k k t (14) posisi dalam arah y,
1 1 i i i y y y v t (15) Dengan a.
1 3 3 3 3 3 3 3 3 m m b v v b r r b b b bm bv br j j b s s b u u b n n b bj bs bu bn Gm y y Gm y y Gm y y GMy k r r r r Gm y y Gm y y Gm y y Gm y y r r r r b.
3 3 3 3 3 3 3 2 1 3 ( ) 0.5 m m b v v b b b bm bv j j b r r b s s b br bj bs u u b n n b bu bn Gm y y Gm y y GMy k r r r Gm y y Gm y y Gm y y r r r Gm y y Gm y y k t r r c.
3 3 3 3 3 3 3 3 3 2 ( ) 0.5 m m b v v b b b bm bv j j b r r b s s b br bj bs u u b n n b bu bn Gm y y Gm y y GMy k r r r Gm y y Gm y y Gm y y r r r Gm y y Gm y y k t r r d.
4 3 3 3 3 3 3 3 3 3 ( ) m m b v v b b b bm bv j j b r r b s s b br bj bs u u b n n b bu bn Gm y y Gm y y GMy k r r r Gm y y Gm y y Gm y y r r r Gm y y Gm y y k t r r 77
2.5 Energi Total PlanetPada simulasi gerak planet ini juga akan dibandingkan nilai galat (eror) energi total planet ketika mengelilingi matahari yang dihasilkan oleh metode Euler, Leapfrog dan Runge-Kutta orde 4. Energi total planet dapat
diperoleh dengan menjumlahkan energi
potensial dan energi kenetik delapan planet secara analitik dan numerik. Selisih hasil analitik dan numerik akan mengahasilkan nilai galat
(eror). Perhitungan energi total planet
dirumuskan dalam perhitungan berikut. energi potensial delapan planet,
m v b r p m v b r j s u n j s u n GMm GMm GMm GMm E r r r r GMm GMm GMm GMm r r r r (16)
energi kinetik delapan planet,
2 2 2 2 2 2 2 2 1 1 1 1 1 2 2 2 2 2 2 2 2 1 1 1 k m m v v b b r r j j s s u u n n E m v m v m v m v m v m v m v m v (17)
Untuk perhitungan energi kinetik secara analitik menggunakan nilai kecepatan awal setiap planet. Sedangkan perhitungan energi kinetik secara numerik menggunakan nilai kecepatan akhir yang diperoleh dari hasil simulasi. Adapun energi total planet dan nilai erornya diperoleh melalui perhitungan berikut.
p k EE E (18) numerik analitik analitik
E
E
e
E
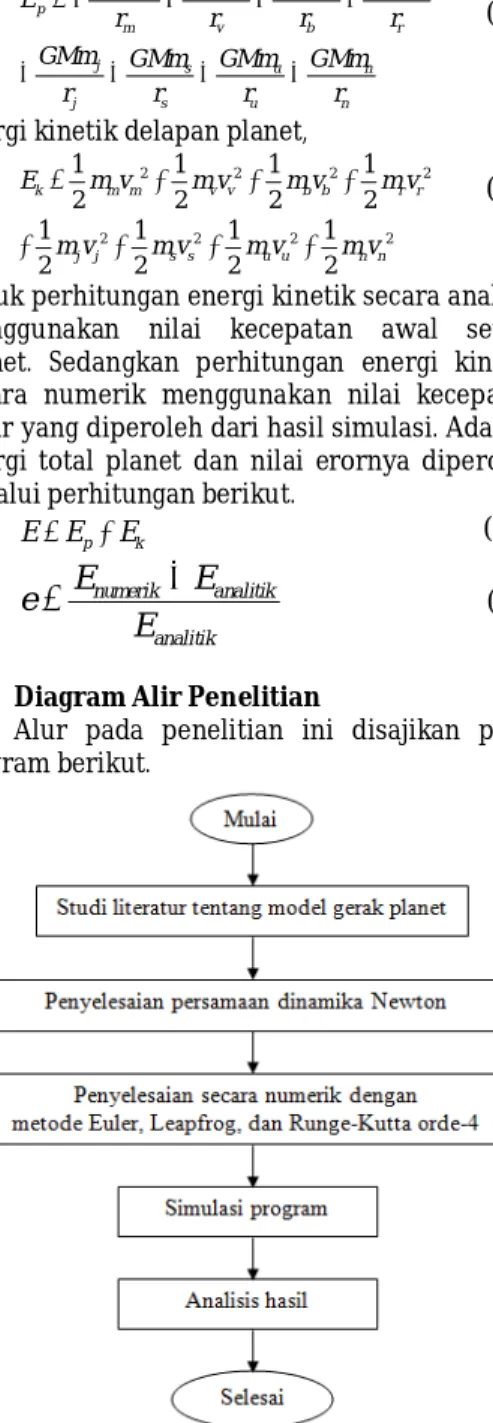
(19)2.6 Diagram Alir Penelitian
Alur pada penelitian ini disajikan pada diagram berikut.
Gambar 3. Tahapan-tahapan penelitian
3. Hasil Dan Pembahasan
Penggambaran mengenai gerak planet sebagaimana yang telah diungkapkan oleh Kepler tidak memperhatikan adanya efek planet lain di sekitarnya. Atau dengan kata lain masalah hanya dibatasi pada two body problems. Hal ini tentunya kurang tepat, mengingat dalam kenyataannya tata surya kita terdiri dari delapan planet yang mengitari matahari. Masalah dua benda yang berinteraksi seperti digambarkan oleh hukum kuadrat terbalik dapat diselesaikan secara eksak. Akan tetapi, jika ditambahkan lagi satu planet saja (selanjutnya dikenal dengan three body problems) maka akan sangat sulit diselesaikan secara analitik. Dalam penelitian ini diambil kasus few body problems yaitu matahari dan delapan planet yang saling
berinteraksi satu sama lain. Persamaan
matematis yang digunakan dalam penelitian ini didapatkan dari persaman (1) dan (2) yang menghasilkan grafik profil gerak planet pada bidang x dan y, serta nilai eror energi total masing-masing metode.
Untuk mempermudah dalam
menggambarkan model gerak planet digunakan suatu satuan universal yang dikenal sebagai satuan astronomi (astronomical unit atau AU).
Satuan universal ini digunakan untuk
mengantisipasi perhitungan numerik yang sangat besar. Satuan astronomi (AU) digunakan sebagai satuan jarak rata-rata planet ke matahari (1 AU = 1,496 x 1011 m). Sedangkan
satuan waktu yang digunakan dalam penelitian ini adalah tahun (1 tahun = 3,15 x 107 s).
Dalam simulasi ini lintasan orbit planet dibuat dalam dua grafik yaitu grafik lintasan planet dalam dan planet luar. Hal ini dikarenakan jarak antara planet Merkurius dan Neptunus sangat jauh sehingga simulasi ini tidak dapat menghasilkan lintasan delapan planet dalam satu grafik. Hasil simulasi program profil gerak planet Merkurius, Venus, Bumi dan Mars dengan metode Euler, Leapfrog dan Runge-Kuttaa orde 4 dapat dilihat pada gambar berikut
.
-2 -1.5 -1 -0.5 0 0.5 1 1.5 2 -2 -1.5 -1 -0.5 0 0.5 1 1.5 2 x(AU) y (A U )Profil Gerak Planet
Gambar 1. Grafik lintasan planet Merkurius, Venus, Bumi dan Mars dengan metode Euler
78
-2 -1.5 -1 -0.5 0 0.5 1 1.5 2 -2 -1.5 -1 -0.5 0 0.5 1 1.5 2 x(AU) y (A U )Profil Gerak Planet
Gambar 2. Grafik lintasan planet Merkurius, Venus, Bumi dan Mars dengan metode Leapfrog
-2 -1. 5 -1 -0.5 0 0.5 1 1.5 2 -2 -1.5 -1 -0.5 0 0.5 1 1.5 2 x(AU) y (A U)
Profil Gerak Planet
Gambar 3. Grafik lintasan planet Merkurius, Venus, Bumi dan Mars dengan metode RK4 Gambar 1, 2 dan 3 merupakan hasil simulasi lintasan orbit planet Merkurius, Venus, Bumi dan Mars dengan. Warna hitam pada ketiga gambar di atas merupakan lintasan planet Merkurius, warna merah merupakan lintasan planet Venus, warna biru merupakan lintasan planet Bumi, dan warna hijau merupakan lintasan planet Mars. Dari ketiga gambar tersebut terlihat bahwa bahwa planet Merkurius mengalami pergeseran paling besar diantara planet Venus, Bumi dan Mars. Hal ini disebabkan karena Merkurius merupakan planet yang paling dekat dengan Matahari. Dalam eksperimennya, Clemence menemukan bahwa presesi planet Merkurius dalam jangka waktu satu abad adalah sebesar
43,110,45
.Untuk hasil simulasi program profil gerak planet Jupiter, Saturnus, Uranus dan Neptunus dapat dilihat pada gambar berikut.
-30 -20 -10 0 10 20 30 -30 -20 -10 0 10 20 30 x(AU) y (A U )
Profil Gerak Planet
Gambar 4. Grafik lintasan planet Jupiter, Saturnus, Uranus dan Neptunus dengan metode
Euler -30 -20 -10 0 10 20 30 -30 -20 -10 0 10 20 30 x(AU) y (A U )
Profil Gerak Planet
Gambar 5. Grafik lintasan planet Jupiter, Saturnus, Uranus dan Neptunus dengan metode
Leapfrog -30 -20 -10 0 10 20 30 -30 -20 -10 0 10 20 30 x(AU) y (A U )
Profil Gerak Planet
Gambar 6. Grafik lintasan planet Jupiter, Saturnus, Uranus dan Neptunus dengan metode
RK4
Gambar 4, 5 dan 6 merupakan hasil simulasi lintasan orbit planet Jupiter, Saturnus, Uranus dan Neptunus. Warna merah pada ketiga gambar di atas merupakan lintasan planet Jupiter, warna hijau merupakan lintasan planet Saturnus, warna hitam merupakan lintasan planet Uranus, dan warna biju merupakan lintasan planet Neptunus.
Hasil simulasi profil gerak planet
menunjukkan bahwa terdapat perbedaan antara simulasi dengan metode Euler, Leapfrog dan metode Runge Kutta orde 4. Perbedaan tersebut dapat dilihat dari posisi matahari sebagai pusat tata surya. Dari hasil simulasi dengan metode Leapfrog terlihat bahwa lintasan planet mengelilingi matahari berbentuk elips dan matahari berada pada salah satu titik fokus. Hal ini sesuai dengan hukum Kepler pertama. Akan tetapi hasil simulasi dengan metode Euler dan Leapfrog sangat menyimpang dari hukum Kepler pertama karena posisi matahari berada di pusat lingkaran bukan disalah satu titik fokus elips.
Selain grafik lintasan orbit setiap planet terhadap matahari, dalam pemodelan ini juga dihasilkan nilai eror dari energi total planet ketika mengelilingi matahari. Dari simulasi program metode Euler dengan interval waktu
0, 0001
dt didapatkan nilai energi total planet
79
-7,6831 x 1027 dan galatnya sebesar -0,1429.
Untuk nilai energi total metode Leapfrog dengan imterval waktu yang sama adalah sebesar -7,7353 x 1027 dan galatnya -0,1371. Sedangkan
nilai energi total planet dengan metode Runge-Kutta orde 4 untuk interval waktu yang sama adalah sebesar -7,6712 x 1027 dan galatnya
-0,1442. terlihat bahwa nilai galat energi total yang dihasilkan oleh metode Leapfrog lebih kecil daripada metode Euler dan Runge Kutta orde 4 untuk interval waktu yang sama.
Hasil simulasi dengan ketiga metode tersebut menunjukkan bahwa energi yang dimiliki oleh planet yaitu energi karena gerakannya (EK) dan energi yang dimiliki karena posisinya (EP) besarnya adalah konstan. Kekekalan energi inilah yang menyebabkan planet bergerak dalam lintasan yang sama pada setiap tahunnya. Tanda negatif pada nilai energi total yang dihasilkan dari ketiga metode tersebut mengisyaratkan bahwa planet terikat kuat oleh matahari dan tidak akan keluar dari lintasan orbit apabila tidak ada energi luar yang masuk ke planet.
4. Kesimpulan
Dari penelitian ini dapat disimpulkan bahwa solusi gerak planet yang dihasilkan
metode Leapfrog lebih presisi dan lebih sesuai dengan hukum Kepler pertama dibandingkan solusi gerak planet yang dihasilkan oleh metode Euler dan Runge Kutta orde 4. Hal ini diperkuat dengan galat (error) energi total hasil simulasi metode Leapfrog lebih kecil daripada metode Euler dan Runge Kutta orde 4.
DAFTAR PUSTAKA
Dehnen, W., dan J.I. Read. 2011. N-body
Simulations of Gravitational Dynamics.
European Physics Journal Plus. Vol. 126. No. 55.
Gould, H. 1938. An Introduction to Computer
Simulation Methods : Applications to Physical Systems. Clark University.
Matthew, J.H., dan Fink, K.K. 2004. Numerical
Methods Using Matlab. 4th Edition.
Prentice-Hall Inc.
Sahid. 2004. Pengantar Komputasi Numerik
dengan MATLAB. Yogyakarta : Andi.
Suparno, S. 2008. Komputasi untuk Sains dan
Teknik : Dalam Matlab. Edisi III. Jakarta :
Univeristas Indonesia.
Tipler, P.A. 1998. Fisika untuk Sains dan Teknik. Jakarta : Erlangga.
Wahyudin. 1987. Metode Analisis Numerik. Bandung : Tarsito.