MERANCANG PINTU AIR OTOMATIS SEBAGAI PENGENDALI KEBANJIRAN DENGAN SENSOR HC-SR04 DAN MENGUKUR DEBIT
AIR DENGAN SENSOR DEBIT AIR BERBASIS ARDUINO UNO
TUGAS AKHIR
MEGA SARTIKA 152408065
PROGRAM STUDI D-III FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM UNIVERSITAS SUMATERA UTARA
MEDAN 2018
MERANCANG PINTU AIR OTOMATIS SEBAGAI PENGENDALI KEBANJIRAN DENGAN SENSOR HC-SR04 DAN MENGUKUR DEBIT
AIR DENGAN SENSOR DEBIT AIR BERBASIS ARDUINO UNO
TUGAS AKHIR
Diajukan untuk melengkapi tugas dan memenuhi syarat memperoleh Ahli Madya
MEGA SARTIKA 152408065
PROGRAM STUDI D-III FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM UNIVERSITAS SUMATERA UTARA
MEDAN
PENGHARGAAN
Puji dan syukur penulis panjatkan kepada Tuhan Yang Maha Esa, atas segala berkat dan rahmat yang dikaruniakan-Nya kepada penulis sehingga mampu menyelesaikan Tugas Akhir ini.
Ucapan terima kasih penulis sampaikan kepada semua pihak yang sangat membantu penulis dalam penyusunan Tugas Akhir ini sehingga dapat selesai.
Terima kasih kepada:
1. Bapak Dr. Kerista Sebayang, MS selaku Dekan Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Sumatera Utara dan Selaku Dosen Pembimbing Penulis yang telah banyak memberikan pengarahan dan bimbingan kepada penulis.
2. Ibu Dr. Nursahara Pasaribu, M.Sc selaku Pembantu Dekan I Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Sumatera Utara.
3. Bapak Drs. Takdir Tamba, M.Eng, Sc selaku Ketua Program Studi D-3 Fisika Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Sumatera Utara.
4. Seluruh Staff Pengajar/Pegawai program studi D-III Fisika Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Sumatera Utara.
5. Bapak, Mama dan Orang Tua Angkat saya tercinta yang senantiasa memberikan dukungan do’a, moral dan material serta bimbingan yang sangat membantu penulis.
6. Abangnda Ahmad Wahyudi yang telah memberikan bantuan berupa ilmu dalam menyelesaikan Tugas Akhir.
7. Teman-teman seperjuangan D-3 Fisika yang memberikan bantuan penulis dalam menyelesaikan Tugas Akhir.
8. Teman-teman saya Putri Sion,Oktaviani Nduru,Tini,Tina dan Diana yang telah mendukung saya untuk menyelesaikan study saya.
9. Semua pihak yang turut membantu penulis dalam menyelesaikan Tugas Akhir.
Penulis menyadari bahwa Tugas Akhir ini masih jauh dari kesempurnaan.
Untuk itu penulis sangat mengharapkan saran dan kritikan yang membangun dari pembaca.
Akhir kata, penulis berharap Tugas Akhir ini tidak hanya sebagai tanggung jawab perkuliahan saja namun dapat bermanfaat juga bagi pihak-pihak yang berkepentingan.
Medan, 02 Mei 2018
Penulis
PERNYATAAN
MERANCANG PINTU AIR OTOMATIS SEBAGAI PENGENDALI KEBANJIRAN DENGAN SENSOR HC-SR04 DAN MENGUKUR DEBIT AIR DENGAN SENSOR DEBIT AIR
BERBASIS ARDUINO UNO
LAPORAN TUGAS AKHIR
Saya mengakui bahwa tugas akhir ini adalah hasil karya sendiri. Kecuali beberapa kutipan dan ringkasan yang masing-masing disebutkan sumbernya.
Medan, 23 Juli 2018
Mega Sartika 152408065
MERANCANG PINTU AIR OTOMATIS SEBAGAI PENGENDALI KEBANJIRAN DENGAN SENSOR HC-SR04 DAN MENGUKUR DEBIT AIR DENGAN SENSOR DEBIT AIR
BERBASIS ARDUINO UNO
ABSTRAK
Pengendalian ketinggian air pada bendungan selama ini masih dilakukan secara manual dengan memanfaatkan operator manusia, yang mana dalam hal ini terkadang terjadi kesalahan dalam pengambilan keputusan ataupun pembacaan ketinggian air karna kesalahan manusia. Dalam penelitian ini, penulis memberikan solusi dengan adanya sistem otomatis pada pintu air bendungan atau waduk, sehingga ketika kondisi level air pada ketinggian tertentu pintu air ini dapat terbuka secara otomatis dengan memanfaatkan penggunaan sensor ultrasonik dan dengan kontrol Arduino. Adapun untuk menentukan terbuka atau tertutupnya pintu air ada beberapa kondisi atau ukuran pembacaan sensor yang dijadikan acuan untuk proses ini. Dalam hal ini tidak hanya pendeteksian ketinggian air pada satu lokasi, namun pada beberapa daerah aliran sungai yang mana data hasil pembacaan sensor akan dikirim melalui transmitter dan diterima oleh receiver di pusat kontrol. Hal ini di peruntukkan sebagai media informasi mengenai kondisi sungai dan bendungan. Sistem otomatis ini dapat mempermudah dalam hal pemantauan kendali ketinggian air di bendungan dan sungai yang menerapkan sistem ini. Adanya sistem ini diharapkan dapat memperkecil respon lambat yang di sebabkan oleh kesalahan manusia, dan juga mempermudah pekerjaan bagi petugas yang sedang berjaga dalam pemantauan.
Kata kunci : Arduino uno, Sensor HC-SR04, Sensor Debit, LCD
DESIGNING AUTOMATIC AIR DOORS AS A FLIGHT CONTROL WITH HC-SR04 SENSOR AND MEASURING WATER DEBIT WITH
WATER DEBIT SENSOR BASED ARDUINO UNO
ABSTRACTS
Through this day, water leveling in dam still use manual control and human operator, which can make error in decision making or observating water level because human error. In this paper, writer give a solution with this automatic system for dam to open and close valve, so while water level reach some point or condition will make door/valve open automatically. This can be happen because writer use ultrasonic sensor for observation or controlling water level and connect that sensor to open hardware Arduino. Otherwise to control door open or close there is some condition or result of sensor value that use for reference of decision making. In this case not only checking water level in one location, but in other location for collecting data about water level in river flow, and data what we get will send via transceiver and will receive in control center for reference. This is need to do for information about river and dam condition, especially water level.
This automatic system can help and make easy observation water level in dam and river that use this system, and writer hope with this system will reduce slow respon and human error, and make operator easier in controlling.
Keywords: Arduino uno, Sensor HC-SR04, Sensor Debit, LCD
DAFTAR ISI
Halaman
LEMBAR PERSETUJUAN i
PENGHARGAAN ii
ABSTRAK iv
ABSTRACTS v
DAFTAR ISI vi
DAFTAR GAMBAR viii
DAFTAR TABEL ix
BAB 1 PENDAHULUAN 1
1.1 Latar Belakang 1
1.2 Permasalahan 2
1.3 Tujuan Penulis 2
1.4 Manfaat Penulis 2
1.5 Sistematika Penulisan 3
BAB 2 TINJAUAN PUSTAKA 4
2.1 Bendungan 4
2.2 Breadboard/Protoboard 5
2.3 Mikrokontroller Arduino Uno 6
2.3.1 Daya (Power) 8
2.3.2 Memori 8
2.3.3 Input dan Output 9
2.3.4 Komunikasi 10
2.3.5 Programming 10
2.3.6 Bahasa Pemrograman Arduino 11
2.3.7 Reset Otomatis (Software) 12
2.3.8 Proteksi Arus Lebih USB 13
2.3.9 Karakteristik Fisik 13
2.4 Light Emitting Diode(LED) 14
2.5 Resistor 15
2.6 Jumper 16
2.7 Sensor HC-SR04 17
2.8 Liquid Crystal Display (LCD) 19
2.8.1 Prinsip Kerja LCD 19
2.8.2 Konfigurasi LCD 2 x 16 20
2.9 Sensor Pengukur Debit Air 20
2.10 Motor Servo 21
BAB 3 METODE PENELITIAN 23
3.1 Waktu dan Tempat 23
3.2 Komponen yang digunakan untuk alat perancang pintu Air 23 Otomatis
3.3 Spesifikasi Sistem 24
3.4 Rangkaian Skematik 25
3.4.1 Rankaian Sensor HC-SR04 25
3.4.2 Rangkaian LCD 25
3.4.3 Rangkaian IC Regulator 7805 26
3.4.4 Rangkaian Sensor Debit 27
3.4.5 Rangkaian Keseluruhan 27
3.5 Flowchart pintu DAM otomatis pengendali banjir 29
BAB 4 HASIL DAN PEMBAHASAN 31
4.1 Program mengukur jarak 31
4.2 Pengujian Pintu Air Otomatis 36
4.3 Grafik Pintu Air Otomatis 36
4.4 Debit Aliran Air 37
BAB 5 KESIMPULAN DAN SARAN 40
5.1 Kesimpulan 40
5.2 Saran 41
DAFTAR PUSTAKA 42
LAMPIRAN
DAFTAR GAMBAR
Halaman
2.1 Protoboard 5
2.2 Arduino Uno 6
2.3 Light Emitting Diode (LED) LCD 2x16 14
2.4 Resistor 15
2.5 Jumper 16
2.6 Sensor HC-SR04 18
2.7 LCD 2x16 19
2.8 Sensor Debit Air 21
3.1 Diagram Blok 24
3.2 Hubungan Arduino dengan Sensor HC-SR04 25
3.3 Hubungan Arduino dengan LCD 26
3.4 Hubungan IC 7805, motor servo dengan arduino 26
3.5 Hubungan sensor debit dengan arduino 27
3.6 Rangkaian keseluruhan 28
3.7 Flowchart pintu otomatis pengendali banjir 29
4.1 Penulisan program pada sofware arduino 34
4.2 Tampilan saat Proses compile dan upload 35
4.3 Tampilan saat proses compile dan upload telah selesai 35
4.4 Grafik Pintu Air Otomatis 36
DAFTAR TABEL
Halaman
2.1 Deskripsi Arduino 7
2.2 Konfigurasi LCD 20
4.1 Pengujian Pintu Air Otomatis 36
BAB 1 PENDAHULUAN
1.1 Latar Belakang
Pintu air sebenarnya sudah ada sejak jaman dahulu, namun bentuknya sangat sederhana. Seiring dengan perkembangan jaman, pintu air pun telah berkembang dengan cepat. Hal ini terlihat dari banyaknya macam pintu air yang ada untuk mengatur aliran air. Pintu air dari jaman dahulu sampai jaman modern ini sangatlah bermanfaat dan tidak dapat dibayangkan jika jaman modern ini tidak diikuti dengan perkembangan dari penggunaan pintu air pada bendungan irigasi dan bendungan pengendalian banjir. Secara umum bendungan merupakan bangunan air yang melintang pada badan sungai dengan fungsi sebagai bangunan penahanan suatu sumber air (Reservoir).
Sebagai bangunan pengendali banjir, dengan adanya bendungan sistem pengendali banjir dapat dilakukan secara berkala pada musim hujan dengan mengurangi limpasan aliran air kiriman dari hulu serta dapat membuang kelebihan air dari waduk melalui saluran pelimpa atau yang disebut Spill Way jika waduk sudah penuh. Bendung merupakan bangunan air yang berfungsi meninggikan/meningkatkan muka air sungai yang melewati puncak bendung atau mercu. Bendung pada dasarnya bangunan air yang dibuat melintang badan sungai.
Sepintas bendung dan bendungan kedengarannya sama tetapi ukuran dari bendung jauh lebih kecil dibandingkan bendungan dan tinggi bendung umumnya < 15 m dari dasar bendung. Fungsi dari bendung pun secara umum selain menaikkan muka air sungai juga berfungsi sebagai tempat pengambilan air (Intake) untuk sistem irigasi persawahan, pembangkit listrik dan sebagai bangunan pengukuran debit aliran sungai. Bendung tetap adalah bangunan yang dipergunakan untuk meninggikan muka air di sungai sampai pada ketinggian yang diperlukan agar air dapat dialirkan ke saluran irigasi melalui pintu pengambilan (Intake) kemudian diteruskan ke saluran primer, saluran sekunder sampai ke petak tersier dan saluran pembuang. Dimana konstruksi dari bendung ini lebih bersifat statis pada umumnya bendung tipe tetap terbuat dari material beton ataupun dari pasangan batu.
1.2 Permasalahan
1. Bagaimana menggunakan sensor agar bisa mengukur ketinggian air
2. Bagaimana menentukan pintu air yang harus dibuka ketika ketinggian air melebihi batas yang telah ditentukan.
3. Bagaimana mengendalikan pintu air secara otomatis dengan referensi tinggi air pada setiap bendungan.
4. Seberapa besar akurasi alat tersebut untuk membuka dan menutup pintu air.
5. Bagaimana cara mengukur debit air
1.3 Tujuan Penulis
Adapun tujuan dari penulisan Tugas Akhir ini adalah :
1. Sebagai salah satu syarat untuk menyelesaikan Program D-3 Fisika FMIPA Universitas Sumatera Utara.
2. Dengan penggunaan pemancar dan penerima sinyal ini diharapkan apabila terjadi perubahan ketinggian air sungai yang terdeteksi oleh sensor dapat diketahui dengan cepat di pusat kendali sistem.
3. Untuk mengetahui cara kerja sensor HC-SR04
4. Dapat merancang dan membuat prototype sistem buka tutup otomatis pintu air pada bendungan.
5. Untuk menghitung persatuan waktu debit air
1.4 Manfaat Penulis
1. Dengan rancangan otomatis ini pekerjaan akan menjadi lebih mudah dan ringan.
2. Pergantian dari system buka tutup menjadi sistem otomatis.
3. Menghemat waktu dan tenaga.
4. Dengan menggunakan sensor debit air maka akan mempermudah dalam mengukur aliran air yang masuk kedalam bak Filter
1.5 Sistematika Penulisan
Untuk mempermudah dalam pembahasan dan penulisan laporan, penulis membagi menjadi beberapa bab-bab yang membentuk laporan ini dalam sistematika penulisan dengan urutan sebagai berikut:
BAB 1: PENDAHULUAN
Dalam bab ini berisikan mengenai latar belakang, pemasalahan, tujuan penulisan, Manfaat Penulisan dan sistematika penulisan.
BAB 2: TINJAUAN PUSTAKA
Dalam bab ini dijelaskan tentang teori-teori pendukung dalam penyelesaian masalah.
BAB 3: METODE PENELITIAN
Dalam bab ini berisikan tentang waktu dan tempat dilakukan perancangan, alat dan bahan yang diperlukan dalam proses perancangan dan pembuatan alat. Mulai dari perancangan dan pembuatan sistem secara hardware dan software.
BAB 4: HASIL DAN PEMBAHASAN
Dalam bab ini dibahas hasil analisa dari rangkaian dan sistem kerja alat, penjelasan mengenai rangkaian-rangkaian yang digunakan pada alat serta penjelasan mengenai program yang diisikan ke mikrokontroller Arduino Uno.
BAB 5: KESIMPULAN DAN SARAN
Dalam bab ini menjelaskan kesimpulan tentang hasil rancangan yang telah dibuat serta saran dalam pengembangan rancangan tersebut.
BAB 2
TINJAUAN PUSTAKA
2.1 Bendungan
Secara umum bendungan merupakan bangunan air yang melintang pada badan sungai dengan fungsi sebagai bangunan penahan/pembendung suatu sumber air (Reservoir) atau waduk, menurut Departemen Pekerjaan Umum defenisi bendungan yaitu "bangunan yang berupa tanah, batu, beton atau pasangan batu yang dibangun selain untuk menahan dan menampung air, dapat juga dibangun untuk menampung limbah tambang atau lumpur. Sebagai bangunan pengendali banjir, dengan adanya bendungan sistem pengendali banjir dapat dilakukan secara berkala pada musim hujan dengan mengurangi limpasan aliran air kiriman dari hulu serta dapat membuang kelebihan air dari waduk melalui saluran pelimpa atau yang disebut Spill Way jika waduk sudah penuh.
Bendung merupakan bangunan air yang berfungsi meninggikan/meningkatkan muka air sungai yang melewati pucak bendung atau mercu. Bendung pada dasarnya bangunan air yang dibuat melintang badan sungai.
Sepintas bendung dan bendungan kedengarannya sama tetapi ukuran dari bendung jauh lebih kecil dibandingkan bendungan dan tinggi bendung umumnya < 15 m dari dasar bendung. Fungsi dari bendung pun secara umum selain menaikkan muka air sungai juga berfungsi sebagai tempat pengambilan air (Intake) untuk sistem irigasi persawahan, pembangkit listrik dan sebagai bangunan pengukuran debit aliran sungai.
Bendung tetap adalah bangunan yang dipergunakan untuk meninggikan muka air di sungai sampai pada ketinggian yang diperlukan agar air dapat dialirkan ke saluran irigasi melalui pintu pengambilan (Intake) kemudian diteruskan ke saluran primer, saluran sekunder sampai ke petak tersier dan saluran pembuang. Dimana konstruksi dari bendung ini lebih bersifat statis pada umumnya bendung tipe tetap terbuat dari material beton ataupun dari pasangan batu.
2.2 Breadboard/Protoboard
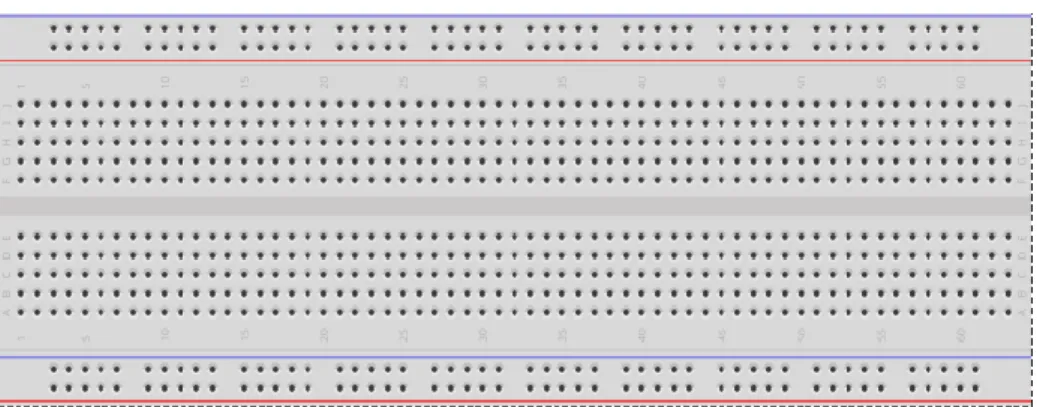
Breadboard adalah papan khusus yang digunakan untuk membuat Prototipe atau rangkaian elektronik yang bersifat percobaan. Project Board atau yang sering disebut sebagai BreadBoard adalah dasar konstruksi sebuah sirkuit elektronik dan merupakan prototipe dari suatu rangkaian elektronik. Breadboard banyak digunakan untuk merangkai komponen, karena dengan menggunakan breadboard, pembuatan prototipe tidak memerlukan proses menyolder ( langsung tancap ). Karena sifatnya yang solderless alias tidak memerlukan solder sehingga dapat digunakan kembali dan dengan demikian sangat cocok digunakan pada tahapan proses pembuatan prototipe serta membantu dalam berkreasi dalam desain sirkuit elektronika.
Gambar 2.1 Protoboard
Solderless breadboard atau singkatnya breadboard, atau ada yang menyebutnya protoboard, adalah papan yang berisi lobang dan sambungan yang disusun sedemikian rupa yang digunakan untuk membuat rangkaian elektronik tanpa perlu menyolder. Tanpa breadboard, kita harus menyambung kaki-kaki komponen dengan kabel atau menyoldernya di atas PCB. Untuk kebutuhan pembuatan prototype atau belajar Arduino hal tersebut tidak efisien. Jika diperhatikan pada breadboard akan kita lihat banyak sekali angka dan huruf yang tertera pada kolom dan barisnya.
Ini sebenarnya tidak memiliki tujuan apapun, hanya untuk memandu saat membuat rangkaian, hal ini jelas mempermudah dalam membuat rangkaian elektronika. Sirkuit yang dibuat mungkin saja rumit dan kompleks dan bisa saja terjadi kesalahan rangkaian yang bisa berpengaruh secara total atau bahkan kerusakan fatal pada komponen. Jika menelusuri rangkaian dengan mengikuti
koneksi nomor baris dan huruf kolom mungkin kesalahan tersebut akan dengan cepat ditemukan. Penomoran baris dan huruf kolom juga akan membantu untuk membuat rangkaian dengan melihatnya langsung dari skema. Banyak buku dan panduan yang menyertakan diagram sirkuit sebagai acuan pada saat kita membuat rangkain pada breadboard. dengan memahami fungsi dari breadboard ini, tentunya akan menunjang mereka yang akan mulai melakukan praktek dengan proyek rangkaian dasar elektronika. Hal ini juga termasuk yang harus dikuasai pada tahap awal pengenalan dasar robotika yang pastinya juga akan memanfaatkan begitu banyak komponen elektronika yang terangkai bersama.
2.3 Mikrokontroller Arduino Uno
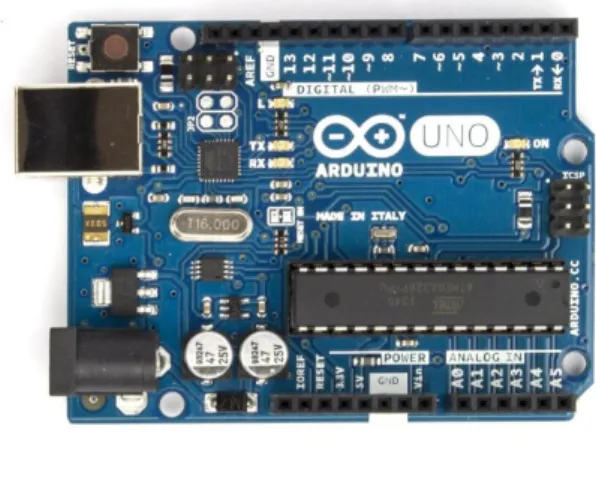
Arduino adalah sebuah board mikrokontroller yang berbasis ATmega328.
Arduino memiliki 14 pin input/output yang mana 6 pin dapat digunakan sebagai output PWM, 6 analog input, crystal osilator 16 MHz, koneksi USB, jack power, kepala ICSP, dan tomb ol reset. Arduino mampu men-support mikrokontroller;
dapat dikoneksikan dengan komputer menggunakan kabel USB.
Gambar 2.2 Arduino Uno
Arduino memiliki kelebihan tersendiri dibanding board mikrokontroler yang lain selain bersifat open source, arduino juga mempunyai bahasa pemrogramannya sendiri yang berupa bahasa C. Selain itu dalam board arduino sendiri sudah terdapat loader yang berupa USB sehingga memudahkan ketika memprogram mikrokontroler didalam arduino. Sedangkan pada kebanyakan board mikrokontroler yang lain yang masih membutuhkan rangkaian loader terpisah untuk memasukkan program ketika kita memprogram mikrokontroler. Port USB
tersebut selain untuk loader ketika memprogram, bisa juga difungsikan sebagai port komunikasi serial. arduino menyediakan 20 pin I/O, yang terdiri dari 6 pin input analog dan 14 pin digital input/output. Untuk 6 pin analog sendiri bisa juga difungsikan sebagai output digital jika diperlukan output digital tambahan selain 14 pin yang sudah tersedia. Untuk mengubah pin analog menjadi digital cukup mengubah konfigurasi pin pada program.
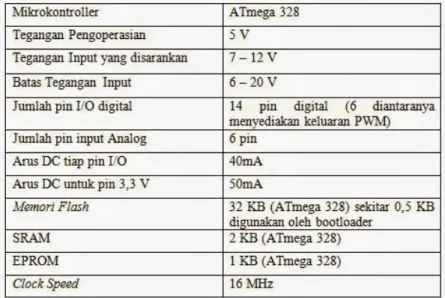
Dalam board kita bisa lihat pin digital diberi keterangan 0-13, jadi untuk menggunakan pin analog menjadi output digital, pin analog yang pada keterangan board 0-5 kita ubah menjadi pin 14-19. Dengan kata lain pin analog 0-5 berfungsi juga sebagi pin output digital 14-16. Sifat open source arduino juga banyak memberikan keuntungan tersendiri untuk kita dalam menggunakan board ini, karena dengan sifat open source komponen yang kita pakai tidak hanya tergantung pada satu merek, namun memungkinkan kita bisa memakai semua komponen yang ada dipasaran. Bahasa pemrograman arduino merupakan bahasa C yang sudah disederhanakan syntax bahasa pemrogramannya sehingga mempermudah kita dalam mempelajari dan mendalami mikrokontroller. Deskripsi Arduio UNO:
Tabel 2.1 Deskripsi Arduino
2.3.1 Daya (Power)
Arduino UNO dapat disuplai melalui koneksi USB atau dengan sebuah power supply eksternal. Sumber daya dipilih secara otomatis. Supply eksternal (non-USB) dapat diperoleh dari sebuah adaptor AC ke DC atau battery. Adaptor dapat dihubungkan dengan mencolokkan sebuah center-positive plug yang panjangnya 2,1 mm ke power jack dari board. Kabel lead dari sebuah battery dapat dimasukkan dalam header/kepala pin Ground (Gnd) dan pin Vin dari konektor POWER. Board Arduino UNO dapat beroperasi pada sebuah suplai eksternal 6 sampai 20 Volt. Jika disupply dengan yang lebih kecil dari 7 V, kiranya pin 5 Volt mungkin mensuplai kecil dari 5 Volt dan board Arduino UNO bisa menjadi tidak stabil. Jika menggunakan suplai yang lebih dari besar 12 Volt, voltage regulator bisa kelebihan panas dan membahayakan board Arduino UNO.
Range yang direkomendasikan adalah 7 sampai 12 Volt. Pin-pin dayanya adalah sebagai berikut:
VIN. Tegangan input ke Arduino board ketika board sedang menggunakan sumber suplai eksternal (seperti 5 Volt dari koneksi USB atau sumber tenaga lainnya yang diatur). Kita dapat menyupply tegangan melalui pin ini, atau jika penyupplyan tegangan melalui power jack, aksesnya melalui pin ini.
5V. Pin output ini merupakan tegangan 5 Volt yang diatur dari regulator pada board. Board dapat disuplai dengan salah satu suplai dari DC power jack (7- 12V), USB connector (5V), atau pin VIN dari board (7-12). Penyuplaian tegangan melalui pin 5V atau 3,3V membypass regulator, dan dapat membahayakan board. Hal itu tidak dianjurkan.
3V3. Sebuah suplai 3,3 Volt dihasilkan oleh regulator pada board. Arus maksimum yang dapat dilalui adalah 50 mA.
GND. Pin ground.
2.3.2 Memori
ATmega328 mempunyai 32 KB (dengan 0,5 KB digunakan untuk bootloader).
ATmega 328 juga mempunyai 2 KB SRAM dan 1 KB EEPROM (yang dapat dibaca dan ditulis (RW/read and written) dengan EEPROM library).
2.3.3 Input dan Output
Setiap 14 pin digital pada Arduino Uno dapat digunakan sebagai input dan output, menggunakan fungsi pinMode(),digitalWrite(), dan digitalRead(). Fungsi- fungsi tersebut beroperasi di tegangan 5 Volt. Setiap pin dapat memberikan atau menerima suatu arus maksimum 40 mA dan mempunyai sebuah resistor pull-up (terputus secara default) 20-50 kOhm. Selain itu, beberapa pin mempunyai fungsi- fungsi spesial:
Serial: 0 (RX) dan 1 (TX). Digunakan untuk menerima (RX) dan memancarkan (TX) serial data TTL (Transistor-Transistor Logic). Kedua pin ini dihubungkan ke pin-pin yang sesuai dari chip Serial Atmega8U2 USB-ke-TTL.
External Interrupts: 2 dan 3. Pin-pin ini dapat dikonfigurasikan untuk dipicu sebuah interrupt (gangguan) pada sebuah nilai rendah, suatu kenaikan atau penurunan yang besar, atau suatu perubahan nilai. Lihat fungsi attachInterrupt() untuk lebih jelasnya.
PWM: 3, 5, 6, 9, 10, dan 11. Memberikan 8-bit PWM output dengan fungsi analogWrite().
SPI: 10 (SS), 11 (MOSI), 12 (MISO), 13 (SCK). Pin-pin ini mensupport komunikasi SPI menggunakan SPI library.
LED: 13. Ada sebuah LED yang terpasang, terhubung ke pin digital 13. Ketika pin bernilai HIGH LED menyala, ketika pin bernilai LOW LED mati.
Arduino UNO mempunyai 6 input analog, diberi label A0 sampai A5, setiapnya memberikan 10 bit resolusi (contohnya 1024 nilai yang berbeda).
Secara default, 6 input analog tersebut mengukur dari ground sampai tegangan 5 Volt, dengan itu mungkin untuk mengganti batas atas dari rangenya dengan menggunakan pin AREF dan fungsi analogReference(). Di sisi lain, beberapa pin mempunyai fungsi spesial:
TWI: pin A4 atau SDA dan pin A5 atau SCL. Mensupport komunikasi TWI dengan menggunakan Wire library
Ada sepasang pin lainnya pada board:
AREF. Referensi tegangan untuk input analog. Digunakan dengan analogReference().
Reset. Membawa saluran ini LOW untuk mereset mikrokontroler. Secara khusus, digunakan untuk menambahkan sebuah tombol reset untuk melindungi yang memblock sesuatu pada board.
2.3.4 Komunikasi
Arduino UNO mempunyai sejumlah fasilitas untuk komunikasi dengan sebuah komputer, Arduino lainnya atau mikrokontroler lainnya. Atmega 328 menyediakan serial komunikasi UART TTL (5V), yang tersedia pada pin digital 0 (RX) dan 1 (TX). Sebuah Atmega 16U2 pada channel board serial komunikasinya melalui USB dan muncul sebagai sebuah port virtual ke software pada komputer.
Firmware 16U2 menggunakan driver USB COM standar, dan tidak ada driver eksternal yang dibutuhkan. Bagaimanapun, pada Windows, sebuah file inf pasti dibutuhkan.
Software Arduino mencakup sebuah serial monitor yang memungkinkan data tekstual terkirim dan dari board Arduino. LED RX dan TX pada board akan menyala ketika data sedang ditransmit melalui chip USB-to-serial dan koneksi USB pada komputer (tapi tidak untuk komunikasi serial pada pin 0 dan 1). Sebuah Software Serial library memungkinkan untuk komunikasi serial pada beberapa pin digital UNO. Atmega328 juga mensupport komunikasi I2C (TWI) dan SPI.
2.3.5 Programming
Arduino UNO dapat diprogram dengan software Arduino (download).
Pilih “Arduino Uno dari menu Tools > Board(termasuk mikrokontroler pada board). ATmega328 pada Arduino Uno hadir dengan sebuah bootloader yang memungkinkan untuk mengupload kode baru ke ATmega328 tanpa menggunakan pemrogram hardware eksternal. ATmega328 berkomunikasi menggunakan protokol STK500 asli (referensi, file C header). Dapat membypass bootloader dan program mikrokontroler melalui kepala/header ICSP (In-Circuit Serial Programming. Sumber kode firmware ATmega16U2 (atau 8U2 pada board revisi 1 dan revisi 2) tersedia. ATmega16U2/8U2 diload dengan sebuah bootloader DFU, yang dapat diaktifkan dengan:
Pada board Revisi 1: Dengan menghubungkan jumper solder pada belakang board (dekat peta Italy) dan kemudian mereset 8U2
Pada board Revisi 2 atau setelahnya: Ada sebuah resistor yang menarik garis HWB 8U2/16U2 ke ground, dengan itu dapat lebih mudah untuk meletakkan ke dalam mode DFU. Dapat menggunakan software Atmel’s FLIP (Windows) atau pemrogram DFU (Mac OS X dan Linux) untuk meload sebuah firmware baru. Atau dapat menggunakan header ISP dengan sebuah pemrogram eksternal (mengoverwrite bootloader DFU).
2.3.6 Bahasa Pemrograman Arduino
Seperti yang telah dijelaskan diatas program Arduino sendiri menggunakan bahasa C. walaupun banyak sekali terdapat bahasa pemrograman tingkat tinggi (high level language) seperti pascal, basic, cobol, dan lainnya.
Walaupun demikian, sebagian besar dari para programer profesional masih tetap memilih bahasa C sebagai bahasa yang lebih unggul, berikut alasan-alasannya:
Bahasa C merupakan bahasa yang powerful dan fleksibel yang telah terbukti dapat menyelesaikan program-program besar seperti pembuatan sistem operasi, pengolah gambar (seperti pembuatan game) dan juga pembuatan kompilator bahasa pemrograman baru.
Bahasa C merupakan bahasa yang portabel sehingga dapat dijalankan di beberapa sistem operasi yang berbeda. Sebagai contoh program yang ditulis dalam sistem operasi windows dapat dikompilasi didalam sistem operasi linux dengan sedikit ataupun tanpa perubahan sama sekali.
Bahasa C merupakan bahasa yang sangat populer dan banyak digunakan oleh programer berpengalaman sehingga kemungkinan besar library pemrograman telah banyak disediakan oelh pihak luar/lain dan dapat diperoleh dengan mudah.
Bahasa C merupakan bahasa yang bersifat modular, yaitu tersusun atas rutin- rutin tertentu yang dinamakan dengan fungsi (function) dan fungsi-fungsi tersebut dapat digunakan kembali untuk pembuatan program-program lainnya tanpa harus menulis ulang implementasinya.
Bahasa C merupakan bahasa tingkat menengah (middle level language) sehingga mudah untuk melakukan interface (pembuatan program antar muka) ke perangkat keras.
Struktur penulisan program dalam bahasa C harus memiliki fungsi utama, yang bernama main(). Fungsi inilah yang akan dipanggil pertama kali pada saat proses eksekusi program. Artinya apabila kita mempunyai fungsi lainselain fungsi utama, maka fungsi lain tersebut baru akan dipanggil pada saat digunakan. Oleh karena itu bahasa C merupakan bahasa prosedur yang menerapkan konsep runtutan (program dieksekusi per baris dari atas ke bawah secara berurutan), maka apabila kita menuliskan fungsi-fungsi lain tersebut dibawah fungsi utama, maka kita harus menuliskan bagian prototipe (prototype), hal ini dimaksudkan untuk mengenalkan terlebih dahulu kepada kompiler daftar fungsi yang akan digunakan di dalam program. Namun apabila menuliskan fungsi-fungsi lain tersebut diatas atau sebelum fungsi utama, maka tidak perlu lagi untuk menuliskan bagian prototipe diatas.
2.3.7 Reset Otomatis (Software)
Dari pada mengharuskan sebuah penekanan fisik dari tombol reset sebelum sebuah penguploadan, Arduino Uno didesain pada sebuah cara yang memungkinkannya untuk direset dengan software yang sedang berjalan pada pada komputer yang sedang terhubung. Salah satu garis kontrol aliran hardware (DTR) dari ATmega8U2/16U2 dihubungkan ke garis reset dari ATmega328 melalui sebuah kapasitor 100 nanofarad. Ketika saluran ini dipaksakan (diambil rendah), garis reset jatuh cukup panjang untuk mereset chip. Software Arduino menggunakan kemampuan ini untuk memungkinkan mengupload kode dengan mudah menekan tombol upload di software Arduino. Ini berarti bahwa bootloader dapat mempunyai sebuah batas waktu yang lebih singkat, sebagai penurunan dari DTR yang dapat menjadi koordinasi yang baik dengan memulai penguploadtan.
Pengaturan ini mempunyai implikasi. Ketika Arduino Uno dihubungkan ke sebuah komputer lain yang sedang running menggunakan OS Mac X atau Linux, Arduino Uno mereset setiap kali sebuah koneksi dibuat dari software
(melalui USB). Untuk berikutnya, setengah-detik atau lebih, bootloader sedang berjalan pada Arduino UNO.
Ketika Arduino UNO diprogram untuk mengabaikan data yang cacat/salah (contohnya apa saja selain sebuah penguploadan kode baru) untuk menahan beberapa bit pertama dari data yang dikirim ke board setelah sebuah koneksi dibuka. Jika sebuah sketch sedang berjalan pada board menerima satu kali konfigurasi atau data lain ketika sketch pertama mulai, memastikan bahwa software yang berkomunikasi menunggu satu detik setelah membuka koneksi dan sebelum mengirim data ini.
Arduino Uno berisikan sebuah jejak yang dapat dihapus untuk mencegah reset otomatis. Pad pada salah satu sisi dari jejak dapat disolder bersama untuk mengaktifkan kembali. Pad itu diberi label “RESET-RN” dapat menonaktifkan reset otomatis dengan menghubungkan sebuah resistor 110 ohm dari tegangan 5V ke garis reset.
2.3.8 Proteksi Arus lebih USB
Arduino UNO mempunyai sebuah sebuah sekring reset yang memproteksi port USB komputer dari hubungan pendek dan arus lebih. Walaupun sebagian besar komputer menyediakan proteksi internal sendiri, sekring menyediakan sebuah proteksi tambahan. Jika lebih dari 500 mA diterima port USB, sekring secara otomatis akan memutuskan koneksi sampai hubungan pendek atau kelebihan beban hilang.
2.3.9 Karakteristik Fisik
Panjang dan lebar maksimum dari PCB Arduino UNO masing-masingnya adalah 2.7 dan 2.1 inci, dengan konektor USB dan power jack yang memperluas dimensinya. Empat lubang sekrup memungkinkan board untuk dipasangkan ke sebuah permukaan atau kotak. Sebagai catatan, bahwa jarak antara pin digital 7 dan 8 adalah 160 mil. (0.16"), bukan sebuah kelipatan genap dari jarak 100 mil dari pin lainnya.
2.4 Light Emitting Diode (LED)
Light Emitting Diode atau sering disingkat dengan LED merupakan komponen yang dapat mengeluarkan emisi cahaya. LED merupakan produk temuan lain setelah diode. Strukturnya juga sama dengan diode, tetapi belakangan ditemukan bahwa electron yang menerjang sambungan P-N juga melepaskan energi berupa energi panas dan energi cahaya. LED dibuat agar lebih efesien jika mengeluarkan cahaya. Untuk mendapatkan emisi cahaya pada semikonduktor, doping yang dipakai adalah gallium, arsenic, dan fospor. Jenis doping yang berbeda menghasilkan warna cahaya yang berbeda pula.
Pada saat ini warna-warna cahaya LED yang banyak adalah warna merah, kuning, dan hijau. LED berwarna biru sangat langka. Pada dasarnya semua warna bisa dihasilkan, namun akan menjadi sangat mahal dan tidak efesien. Dalam memilih LED selain warna, perlu diperhatikan tegangan kerja, arus maksimum dan disipasi dayanya. Rumah (chasing) LED dan bentuknya juga bermacam- macam, ada yang persegi empat, bulat dan lonjong.
Sebuah LED yang tipikal memiliki kemasan berbentuk kubah bulat yang terbuat dari bahan plastic, dengan pinggiran yang menonjol (rim) pada bagian bawah kubah. Terdapat dua buah kaki terminal di bagian bawah kubah. Biasanya, meskipun tidak selalu demikian, kaki katoda lebih pendek dari kaki anoda. Cara lain untuk membedakan kaki katoda dengan kaki anoda adalah dengan memperhatikan bagian rim (apabila LED yang bersangkutan memang memilikinya). Rim dibuat berbentuk datar pada sisi yang berdekatan dengan kaki katoda.
Gambar 2.3 Light Emitting Diode (LED)
Sebuah LED membutuhkan arus sekitar 20 mA untuk memancarkan cahaya dengan kecerahan maksimum, meskipun arus sekecil 5 mA masih dapat menghasilkan cahaya yang jelas tampak. Jatuh tegangan maju sebuah LED rata- rata adalah 1,5 V, sehingga pasokan tegangan 2 V dapat menyalakan sebagian besar LED dengan kecerahan maksimum. Dengan level-level tegangan yang lebih tinggi, LED dapat terbakar apabila tegangan maju yang diberikan melebihi 2 V.
maka penting untuk menyambungkan resistor pembatas arus secara seri ke sebuah LED.
2.5 Resistor
Konsep resistansi sebagai suatu yang melawan arus. Bentuk-bentuk resistor konvensional mengikuti suatu hukum garis lurus ketika tegangan diplot terhadap arus dan ini memungkinkan kita untuk menggunakan resistor sebagai suatu sarana untuk mengkonveksi arus menjadi jatuh tegangan dan sebaliknya.
Karena itu resistor merupakan sarana untuk mengkontrol arus dan tegangan yang bekerja dalam rangkaian-rangkaian elektronika. Resisor juga dapat berperan sebagai beban untuk mensimulasi keberadaan suatu rangkaian selama pengujian.
Gambar 2.4 Resistor
Tiga buah cincin warna dipergunakan untuk mengindikasikan nilai tahanan sebuah resistor. Cincin-cincin ini ditempatkan saling berdekatan disalah satu ujung badan resistor. Warna tiap-tiap cincin merepresentasikan sebuah bilangan. Membaca kode warna dari ujung resistor terdekat, warna-warna tersebut memiliki arti: Cincin pertama adalah digit pertama dari nilai tahanan. Cincin kedua merupakan digit kedua dari nilai tahanan. Dan cincin ketiga merupakan faktor pengali (sebuah nilai pemangkatan bilangan 10, atau banyaknya angka nol dibelakang kedua digit pertama).
Spesifikasi-spesifikasi untuk suatu resistor umumnya meliputi nilai resistansi (dinyatakan dalam ohm (Ω), kilohm (kΩ) atau megaohm (MΩ)), nilai ketepatan atau tolerasnsi (dinyatakan sebagai penyimpangan maksimum yang diizinkan dari nilai yang tertera), dan rating daya (yang harus sama dengan atau lebih besar daripada disipasi daya maksimumnya). Nilai yang tertera pada susatu resistor bukanlah resistansi eksaknya. Penyimpangan-penyimpangan kecil dalam nilai resistansi pasti selalu terjadi akibat adanya toleransi produksi. Resistor tersedia dalam beberapa seri yang nilai-nilainya merupakan kelipatan sepuluh, dimana jumlah nilai yang diberikan setiap seri ditentukan oleh toleransinya.
Untuk mencakup kisaran nilai resistansi yang sepenuhnya menggunakana resistor yang bertoleransi ± 20%, harus menyediakan enam nilai dasar.
Rating daya resistor berkaitan dengan suhu operasi dan resistor akan mengalami penurunan rating pada suhu yang tinggi. Jika keandalan merupakan hal yang penting, resistor harus dioperasikan jauh dibawah nilai normal disipasi daya maksimumnya.
Resistor karbon dan resistor oksida logam umumnya ditera dengan kode- kode warna yang menunjukkan nilai dan toleransinya. Ada dua metode pengkodean warna yang umumnya digunakan. Yang satu adalah dengan menggunakan empat cincin warna dan yang lain menggunakan lima cincin warna.
2.6 Jumper
Kabel Jumper Breadboard Male to Male merupakan kabel jumper yang dapat gunakan untuk menghubungkan komponen-komponen elektronik yang Anda gunakan, memiliki panjang antara 10 cm, 20 cm hingga 30 cm.
Gambar 2.5 Jumper
Dalam merancang sebuah design peralatan elektronik tentunya sangat dibutuhkan sebuah kabel untuk menghubungkan komponen eletronik yang satu dengan komponen elektronik yang lainnya. Maka dari itu Kabel Jumper Breadboard Male to Male merupakan salah satu jenis kabel jumper untuk breadboard yang dapat Anda gunakan untuk menghubungkan komponen- komponen elektronik yang satu dengan yang lainnya. Fungsi Produk : Kabel Jumper ini dapat digunakan untuk menyambungkan komponen elektronik yang satu dengan yang lainnya pada saat membuat projek prototipe dengan menggunakan breadboard. Spesifikasi Produk :
~ Kabel Jumper Breadboard memiliki panjang antara 10 cm, 20 cm hingga 30 cm.
~ Jenis socketnya adalah male to male
~ Jenis kabel adalah serabut
~ Sedangkan untuk jenis housing adalah bulat.
~ Isi dalam paket 65 pcs.
Manfaat :
Kabel Jumper untuk Breadboard berfungsi untuk menghubungkan beberapa breadboard, menghubungkan antartitik pada pcb single slide dan juga dapat digunakan untuk menghubungkan jalur rangkaian yang terputus dengan cara menjumpernya.
2.7 Sensor HC-SR04
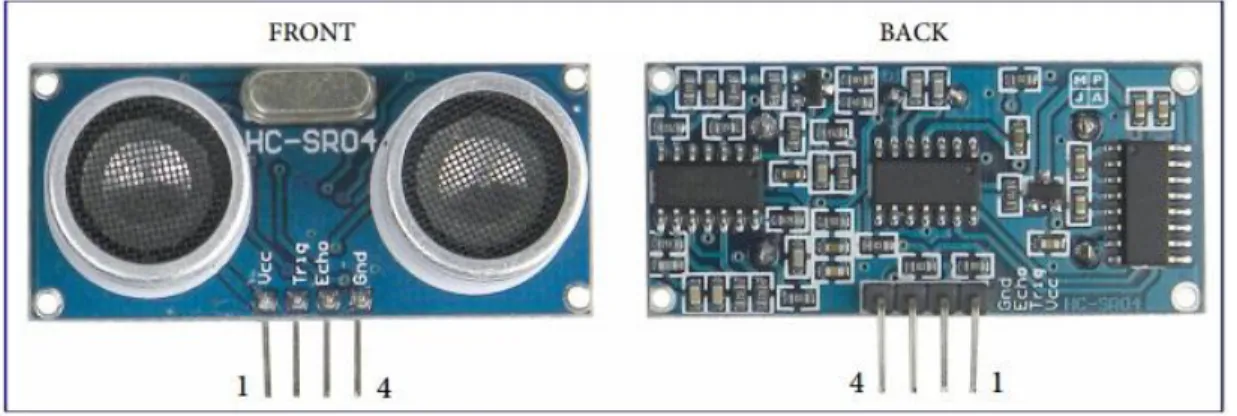
HC-SR04 adalah Sensor Ultrasonik yang memiliki dua elemen, yaitu elemen Pendeteksi gelombang ultrasonik, dan juga sekaligus elemen Pembangkit gelombang ultrasonik. Sensor Ultrasonik adalah sensor yang dapat mendeteksi gelombang ultrasonik, yaitu gelombang suara yang memiliki frekuensi ultrasonik atau frekuensi di atas kisaran frekuensi pendengaran manusia
Gambar 2.6 Sensor HC-SR04
Sensor HC-SR04 adalah sensor pengukur jarak berbasis gelombang ultrasonik. Prinsip kerja sesnsor ini pirip dengan radar ultrasonik. Gelombang ultrasonik di pancarkan kemudian di terima balik oleh receiver ultrasonik. Jarak antara waktu pancar dan waktu terima adalah representasi dari jarak objek. Sensor ini cocok untuk aplikasi elektronik yang memerlukan deteksi jarak termasuk untuk sensor pada robot. Sensor HC-SR04 adalah versi low cost dari sensor ultrasonic PING buatan parallax. Perbedaaannya terletak pada pin yang digunakan. HC-SR04 menggunakan 4 pin sedangkan PING buatan parallax menggunakan 3 pin.
Pada Sensor HC-SR04 pin trigger dan output diletakkan terpisah.
Sedangkan jika menggunakan PING dari Parallax pin trigger dan output telah diset default menjadi satu jalur. Tidak ada perbedaaan signifikan dalam pengimplementasiannya. Jangkauan karak sensor lebih jauh dari PING buatan parllax, dimana jika ping buatan parllax hanya mempunyai jarak jangkauan maksimal 350 cm sedangkan sensor HC-SR04 mempunyai kisaran jangkauan maksimal 400-500cm.
Sensor ultrasonik HC-SR04 menggunakan sonar untuk menentukan jarak terhadap sebuah objek, seperti yang dilakukan Kelelawar atau Lumba-lumba.
Sensor ini memiliki akurasi yang cukup baik dan pembacaan yang cukup stabil.
Operasionalnya tidak dipengaruhi oleh cahaya matahari atau material berwarna gelap, namun dipengaruhi oleh material akustik. Sensor ini memiliki spesifikasi jangkauan 2 cm – 400 cm dengan resolusi 0.3 cm, serta jangkauan sudut kurang dari 15 derajat.
2.8 Liquid Crystal Display (LCD)
Liquid crystal display adalah suatu jenis media tampil yang menggunakan kristal cair sebagai penampil utama. LCD sudah digunakan diberbagai bidang misalnya alal–alat elektronik seperti televisi, kalkulator, atau pun layar komputer.
Gambar 2.7 LCD 2x16
LCD sangat berfungsi sebagai penampil yang nantinya akan digunakan untuk menampilkan status kerja alat. Adapun fitur yang disajikan dalam LCD ini adalah:
Terdiri dari 16 karakter dan 2 baris.
Mempunyai 192 karakter tersimpan.
Terdapat karakter generator terprogram.
Dapat dialamati dengan mode 4-bit dan 8-bit.
Dilengkapi dengan back light.
2.8.1 Prinsip Kerja LCD
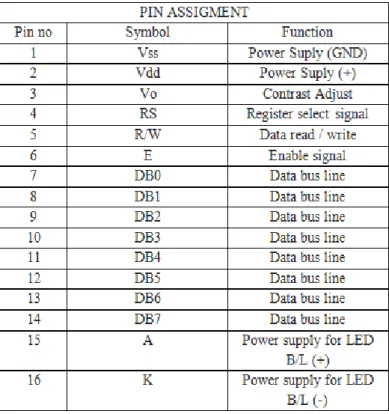
Cara kerja LCD adalah Pada aplikasi umumnya RW diberi logika rendah
“0”. Bus data terdiri dari 4-bit atau 8-bit. Jika jalur data 4-bit maka yang digunakan ialah DB4 sampai dengan DB7. Sebagaimana terlihat pada table diskripsi, interface LCD merupakan sebuah parallel bus, dimana hal ini sangat memudahkan dan sangat cepat dalam pembacaan dan penulisan data dari atau ke LCD. Kode ASCII yang ditampilkan sepanjang 8-bit dikirim ke LCD secara 4-bit atau 8 bit pada satu waktu. Jika mode 4-bit yang digunakan, maka 2 nibble data dikirim untuk membuat sepenuhnya 8-bit (pertama dikirim 4-bit MSB lalu 4-bit LSB dengan pulsa clock EN setiap nibblenya).
Jalur kontrol EN digunakan untuk memberitahu LCD bahwa mikrokontroller mengirimkan data ke LCD. Untuk mengirim data ke LCD
program harus menset EN ke kondisi high “1” dan kemudian menset dua jalur kontrol lainnya (RS dan R/W) atau juga mengirimkan data ke jalur data bus.
Mode 8-bit sangat baik digunakan ketika kecepatan menjadi keutamaan dalam sebuah aplikasi dan setidaknya minimal tersedia 11 pin I/O (3 pin untuk kontrol, 8 pin untuk data). Sedangkan mode 4 bit minimal hanya membutuhkan 7-bit (3 pin untuk kontrol, 4 pin untuk data). Bit RS digunakan untuk memilih apakah data atau instruksi yang akan ditransfer antara mikrokontroller dan LCD. Jika bit ini di set (RS = 1), maka byte pada posisi kursor LCD saat itu dapat dibaca atau ditulis.
Jika bit ini di reset (RS = 0), merupakan instruksi yang dikirim ke LCD atau status eksekusi dari instruksi terakhir yang dibaca.
2.8.2 Konfigurasi LCD 2 x 16
Tabel 2.2 Konfigurasi LCD
2.9 Sensor Pegukur Debit Air
Water flow sensor ini terdiri atas katup plastik, rotor air, dan sebuah sensor hall-effect.Prinsip kerja sensor ini adalah dengan memanfaatkan fenomena efek Hall. Efek Hall ini didasarkan pada efek medan magnetik terhadap partikel
bermuatan yang bergerak. Ketika ada arus listrik yang mengalir pada divais efek Hall yang ditempatkan dalam medan magnet yang arahnya tegak lurus arus listrik, pergerakan pembawa muatan akan berbelok ke salah satu sisi dan menghasilkan medan listrik. Medan listrik terus membesar hingga gaya Lorentz yang bekerja pada partikel menjadi nol. Perbedaan potensial antara kedua sisi divais tersebut disebut potensial Hall. Potensial Hall ini sebanding dengan medan magnet dan arus listrik yang melalui divais. Dalam hidrologi dikemukakan, debit air sungai adalah, tinggi permukaan air sungai yang terukur oleh alat ukur pemukaan air sungai. Pengukurannya dilakukan tiap hari, atau dengan pengertian yang lain debit atau aliran sungai adalah laju aliran air (dalam bentuk volume air) yang melewati suatu penampang melintang sungai per satuan waktu. Dalam sistem satuan SI besarnya debit dinyatakan dalam satuan meter kubik per detik (m3/dt).
Debit aliran air adalah banyaknya volume zat jarak yang melalui suatu penampang tiap satuan waktu.
Gambar 2.8 Sensor Debit Air
2.10 Motor Servo/DC
Motor servo adalah sebuah motor DC yang dilengkapi rangkaian kendali dengan sistem closed feedback yang terintegrasi dalam motor tersebut. Pada motor servo posisi putaran sumbu (axis) dari motor akan diinformasikan kembali ke rangkaian kontrol yang ada di dalam motor servo/Motor servo adalah sebuah
perangkat atau aktuator putar (motor) yang dirancang dengan sistem kontrol umpan balik loop tertutup (servo), sehingga dapat di set-up atau di atur untuk menentukan dan memastikan posisi sudut dari poros output motor. motor servo merupakan perangkat yang terdiri dari motor DC, serangkaian gear, rangkaian kontrol dan potensiometer. Serangkaian gear yang melekat pada poros motor DC akan memperlambat putaran poros dan meningkatkan torsi motor servo, sedangkan potensiometer dengan perubahan resistansinya saat motor berputar berfungsi sebagai penentu batas posisi putaran poros motor servo.
Penggunaan sistem kontrol loop tertutup pada motor servo berguna untuk mengontrol gerakan dan posisi akhir dari poros motor servo. Penjelasan sederhananya begini, posisi poros output akan di sensor untuk mengetahui posisi poros sudah tepat seperti yang di inginkan atau belum, dan jika belum, maka kontrol input akan mengirim sinyal kendali untuk membuat posisi poros tersebut tepat pada posisi yang diinginkan. Untuk lebih jelasnya mengenai sistem kontrol loop tertutup, perhatikan contoh sederhana beberapa aplikasi lain dari sistem kontrol loop tertutup, seperti penyetelan suhu pada AC, kulkas, setrika dan lain sebagainya.
Ada dua jenis motor servo, yaitu motor servo AC dan DC. Motor servo AC lebih dapat menangani arus yang tinggi atau beban berat, sehingga sering diaplikasikan pada mesin-mesin industri. Sedangkan motor servo DC biasanya lebih cocok untuk digunakan pada aplikasi-aplikasi yang lebih kecil. Dan bila dibedakan menurut rotasinya, umumnya terdapat dua jenis motor servo yang dan terdapat di pasaran, yaitu motor servo rotation 180⁰ dan servo rotation continuous.
Motor servo standard (servo rotation 180⁰) adalah jenis yang paling umum dari motor servo, dimana putaran poros outputnya terbatas hanya 90⁰ kearah kanan dan 90⁰ kearah kiri. Dengan kata lain total putarannya hanya setengah lingkaran atau 180⁰. Motor servo rotation continuous merupakan jenis motor servo yang sebenarnya sama dengan jenis servo standard, hanya saja perputaran porosnya tanpa batasan atau dengan kata lain dapat berputar terus, baik ke arah kanan maupun kiri.
BAB 3
METODE PENELITIAN
3.1 Waktu dan Tempat
Perancangan ini telah dilakukan pada bulan Februari sampai Mei 2018 di Kos, rumah tinggal susuk , dan Perpustakaan Universitas Sumatera Utara.
3.2 Komponen yang digunakan untuk alat perancang pintu air otomatis 1. Satu set komputer berfungsi untuk pengelolaan data dan pemograman 2. Solder berfungsi untuk mencairkan timah dan menyambungkan beberapa
komponen elektronik
3. Obeng berfungsi untuk memasang baut dan mur
4. Mesin potong triplek berfungsi untuk memotong triplek dan akrilik 5. Attractor berfungsi sebagai alat penyedot timah
6. Mur dan baut berfungsi sebagai peguat dalam pemasangan komponen pada papan triplek dan akrilik
7. Akrilik berfungsi sebagai pelindung komponen pada alat
8. Spacer berfungsi sebagai penyanggah antara akrilik dengan triplek 9. Papan triplek berfungsi sebagai tempat meletakkan alat
10.Arduino Uno R3 berfungsi sebagai mikrokontroler 11.Sensor HC-SR04 berfungsi untuk mendeteksi jarak
12.LCD (Liquid Crystal Display) berfungsi untuk menampilkan status kerja alat
13.Potensiometer berfungsi sebagai pengatur tegangan 14.Sensor Debit berfungsi sebagai pengukur debit air 15.Adaptor berfungsi sebagai su pply tegangan
16.IC 7805 berfungsi sebagai menunjukkan output tegangan 17.Sensor pengukur debit air berfungsi sebagai mengukur debit air
18.Stop watch berfungsi sebagai menghitung waktu yang Telah ditentukan 19.Motor Servo berfungsi sebagai pengerak gir
3.3 Spesifikasi Sistem
Dalam merancang pintu air otomatis dan pengukur debit ini diperlukan sensor jarak dan sesor debit. Sensor jarak digunakan untuk mengukur jarak air jika jarak air ke sensornya < dari 3 cm maka pintu airnya akan terbuka jika dari 4- 7 cm maka dinyatakan pintu aman jika > dari 8 cm maka pintu akan tertutup dan untuk sensor debitnya akan mengukur Waktu Aliran, dan Volume Aliran pada sistem bendungannya. Dalam sistem perancang air otomatis dan pengukur debit ini akan dirancang sesuai diagram blok seperti pada gambar dibawah ini:
Gambar 3.1 Diagram Blok Power Supply
ply
Arduino
LCD Sensor
HC-SR04
Motor Stepper Sensor Debit
3.4 Rangkaian Skematik
3.4.1 Rangkaian Sensor HC-SR04
Pada alat pengendali pintu air ini, sensor yang digunakan adalah sensor HC-SR04. Dari datasheet, sensor ini dapat mengukur jarak air sesuai dengan jarak yang ditentukan
.
Gambar 3.2 Hubungan Arduino dengan Sensor HC-SR04 Keterangan:
Kaki VCC pada sensor HC-SR04 dihubungkan ke pin VCC pada Arduino
Kaki TRIG pada sensor HC-SR04 dihubungkan ke pin D1 pada Arduino
Kaki ECHO pada sensor HC-SR04 dihubungkan ke pin D0 pada Arduino
Kaki GND pada sensor HC-SR04 dihubungkan ke pin GND pada Arduino
3.4.2 Rangkaian LCD
Pada alat ini, display yang digunakan adalah LCD (Liquid Crystal Display) 16 x 2. Untuk blok ini tidak ada komponen tambahan karena arduino dapat memberi data langsung ke LCD, pada LCD Hitachi - M1632 sudah terdapat driver untuk mengubah data ASCII output mikrokontroler menjadi tampilan karakter. Pemasangan trimpot sebesar 10 KΩ untuk mengatur kontras karakter yang tampil. Pin I/O dua arah dan pin fungsi khusus, yaitu sebagai Timer/Counter, komperator analog dan SPI mempunyai fungsi khusus sebagai pengiriman data secara serial. Sehingga nilai yang akan tampil pada LCD display akan dapat dikendalikan oleh Arduino Uno.
Gambar 3.3 Hubungan Arduino dengan LCD Keterangan:
Kaki RS pada LCD dihubungkan ke pin 11 pada Arduino
Kaki RW pada LCD dihubungkan ke pin GND pada Arduino
Kaki D4 pada LCD dihubungkan ke pin 5 pada Arduino
Kaki D5 pada LCD dihubungkan ke pin 4 pada Arduino
Kaki D6 pada LCD dihubungkan ke pin 3 pada Arduino
Kaki D7 pada LCD dihubungkan ke pin 2 pada Arduino
Kaki E (Enable) pada LCD dihubungkan ke pin 8 pada Arduino
Kaki A (Anoda) pada LCD dihubungkan ke pin VCC pada Arduino
Kaki K (Katoda) pada LCD dihubungkan ke pin GND pada Arduino 3.4.3 Rangkaian IC Regulator 7805
Gambar 3.4 Hubungan IC 7805,Motor Servo dengan Arduino Keterangan :
Kaki 1 pada JP1 dihubungkan ke kaki input IC7805
Kaki 3 pada JP1 dihubungkan ke kaki GND pada Arduino
Kaki 1 pada Motor Stepper dihubungkan ke VCC
Kaki 2 pada Motor Stepper dihubungkan ke kaki ASECL pada Arduino
Kaki 3 pada Motor Stepper dihubungkan ke kaki GND 3.4.4 Rangkaian Sensor Debit
Gambar 3.5 Hubungan Sensor Debit dengan Arduino
Keterangan:
Kaki 1 pada sensor debit dihubungkan ke kaki GND
Kaki 2 pada sensor debit dihubungkan ke pin D12 pada Arduino
Kaki 3 pada sensor debit dihubungkan ke VCC
3.4.5 Rangkaian Keseluruhan Sistem
Rangkaian keseluruhan sistem dari alat pengendali pintu air otomatis dan pengukur debit air dibagi menjadi 3 bagian yaitu: power supply, bagian input (sensor) , dan bagian output. Bagian power supply merupakan input tegangan dari baterai. Bagian input terdiri dari 2 buah input yaitu sensor HC-SR04 dan sensor Debit. Bagian output terdiri dari LCD, dan Motor Stepper.
Gambar 3.6 Rangkaian Keseluruhan
3.5 Flowchart Pintu DAM Otomatis Pengendali Banjir
Tidak
YA
Gambar 3.7 Flowchar Pintu Otomatis Pengendali Banjir
Dalam setiap aliran air yang masuk ke dalam bendungan maka sensor ultrasonic/sensor jarak akan bekerja untuk membaca baik dalam tingkat
Mulai
Aliran Air
Mengukur jarak (sensor Hc-SR04) dan mengukur debit air (sensor debit)
(
Tampilkan nilai pada LCD 16×2
Jika ketinggian air > dari 8 cm
maka
Membaca nilai sensor jarak
Pintu Air Terbuka
Pintu Air Tertutup
Selesai
ketinggian maupun kerendahan airnya. Jika jarak airnya < dari 3 cm maka akan ditampilkan di LCD Pintu Terbuka jika jarak dari 4-7 cm maka ditampilkan di LCD Pintu Aman dan jika jarak airnya > dari 8 cm maka ditampilkan di LCD Pintu Tertutup. Untuk sensor debitnya akan bekerja pada air yang mengalir saja dan untuk mengukur aliran air menggunakan rumus w=v/d.
BAB 4
HASIL DAN PEMBAHASAN
4.1 Program mengukur jarak
Persiapan pertama sebelum memasukkan program adalah menghubungkan mikrokontroler arduino dengan PC melalui USB port. Langkah berikutnya adalah membuka software arduino.cc, dan melakukan penulisan program pada software, berikut ini adalah program yang di tuliskan pada software:
#include <LiquidCrystal.h>
LiquidCrystal lcd(13, 12, 7, 6, 5, 4);
int motor1Pin1 = 10;
int motor1Pin2 = 3;
int enable1Pin = 11;
int trigPin = A3; //Trig - green Jumper int echoPin = A4; //Echo - yellow Jumper long duration, cm, meter;
int TURBINE; //pengukuran SINYAL data yang bersifat incremental int HSensor = 2; //nama alias pada pin 2
int Calc;
void speedrpm () //fungsi penghitungan dan interrupt {
TURBINE++; //bersifat incrementing (dengan mode falling edge) }
void setup() { //Serial Port begin Serial.begin (9600);
pinMode(HSensor, INPUT); //inisialisasi sebagai input //Serial.begin(9600);
attachInterrupt(0, speedrpm, RISING); //cara penulisan perintah interrupt
pinMode(motor1Pin1, OUTPUT);
pinMode(motor1Pin2, OUTPUT);
pinMode(enable1Pin, OUTPUT);
digitalWrite(enable1Pin, HIGH);
//Define inputs and outputs pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
}
void loop() {
lcd.begin(16, 2);
// Sensor dipicu oleh pulsa HIGH dari 10us atau lebih.
// Berikan pulsa LOW pendek terlebih dahulu untuk memastikan pulsa HIGH bersih:
digitalWrite(trigPin, LOW);
delayMicroseconds(5);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
// Baca sinyal dari sensor: pulsa HIGH yang
// duration adalah waktu (dalam mikrodetik) dari pengirim // Dari ping untuk penerimaan Echo off dari sebuah objek.
pinMode(echoPin, INPUT);
duration = pulseIn(echoPin, HIGH);
// convert jarak kedalam cm dan meter cm = (duration/2) / 29.1;
meter = (duration/2) / 100;
Serial.print(meter);
Serial.print("m, ");
Serial.print(cm);
Serial.print("cm");
Serial.println();
//lcd.setCursor(0, 0);
//lcd.print(meter);
//lcd.setCursor(5, 0);
//lcd.print("m, ");
lcd.setCursor(0, 0);
lcd.print("S:");
lcd.setCursor(2, 0);
lcd.print(cm);
//lcd.setCursor(4, 1);
lcd.print("cm ");
lcd.setCursor(7, 0);
lcd.print("D:");
lcd.setCursor(9 , 0);
lcd.print(Calc, DEC); //menampilkan hasil pembacaan kalkulasi flow rate dalam bentuk dec di serial monitor
lcd.print(" L/h"); //Tampilkan L / hour pada baris baru
//lcd.println();
if(cm<=3){
digitalWrite(motor1Pin1, LOW);
digitalWrite(motor1Pin2, HIGH);
lcd.setCursor(0, 1);
lcd.print("Buka Pintu");}
else if(cm>=8){
digitalWrite(motor1Pin1, HIGH);
digitalWrite(motor1Pin2, LOW);
lcd.setCursor(0, 1);
lcd.print("Tutup Pintu");}
else if(cm>=4){
lcd.setCursor(0, 1);
lcd.print("Aman");}
delay(1000);
TURBINE = 0; //data awal = 0
sei(); //perintah aktifnya mode interrupt delay (1000); //nilai delay 1 detik
cli(); //perintah untuk matinya program interrupt Calc = (TURBINE * 60 / 7.5); //Pulsa * 60 / 7.5
//satuan FLOW RATE benda cair yaitu L / hour
Serial.print(Calc, DEC); //menampilkan hasil pembacaan kalkulasi flow rate dalam bentuk dec di serial monitor
Serial.print(" L/hour\r\n"); //Tampilkan L / hour pada baris baru
}
Gambar 4.1 Penulisan program pada software arduino.
Setelah pengetikan program selesai langkah selajutnya adalah compile program untuk memastikan apakah terdapat error atau warning pada program. Jika tidak terjadi error maka upload program.
Gambar 4.2 Tampilan saat proses compile dan upload
Gambar 4.3 Tampilan saat proses compile dan upload telah selesai
4.2 Pengujian pintu air otomatis
Pada pengujian alat ini dilakukan dengan mengukur ketinggian air pada sensor HC-SR04/sensor Ultrasonic, menghitung volume yang masuk kedalam bak dan menghitung kecepatan air yang mengalir pada sensor debit. Pengujian ini dilakukan untuk mengetahui pada jarak brapakah air terbuka,aman, dan tertutup.
Berikut ini adalah data dari hasil pengujian pintu air otomatis.
Tabel 4.1 Pengujian Pintu Air Otomatis Pengujian
Jarak sensor HC-SR04 (cm)
Kecepatan Sensor Debit (L/h)
Volume Air (cm3)
Keterangan
3 248 1656 Pintu Terbuka
4 256 1449 Aman
5 248 1242 Aman
9 80 828 Pintu Tertutup
10 72 414 Pintu Tertutup
4.3 Grafik Pintu Air Otomatis
Gambar 4.4 Grafik pintu air otomatis
248 256 248
80 72
0 50 100 150 200 250 300
3 cm 4 cm 5 cm 9 cm 10 cm
Debit (L/h) dan Jarak Ketinggian
4.4 Debit Aliran Air
Debit aliran merupakan jumlah volume air yang mengalir dalam waktu tertentu melalui suatu penampang air, saluran, pipa atau kran[9].
Untuk menentukan debit air menggunakan persamaan:
Dimana :
Q : Debit (l/jam) V : Volume (m3) P : panjang (m) L : Lebar (m) T : Tinggi (m) t : Waktu (s)
Pembahasan Soal
Bayu memiliki bak dengan ukuran panjang 23 cm, Lebar 18 cm, Tinggi 8 cm. Bak tersebut diisi air dari pipa. Pipa tersebut mampu mengisi air bak dalam waktu 1 menit untuk membuka pintu air otomatis. Berapa liter/detik debit air yang mengalir dari pipa?
Penyelesaian:
Dik : P = 23 cm L = 18 cm T = 8 cm
t = 1 menit = 60 detik Dit : Debit (Q)?
Jawab:
Q = P×L×T = 3312 cm3
Jadi debit aliran pipa air adalah 55,2 l/jam
BAB 5
KESIMPULAN DAN SARAN
5.1 Kesimpulan
Dari perancangan dan pengujian alat pendeteksi jarak pada air bendungan dapat diambil beberapa kesimpulan sebagai berikut:
1. Prinsip kerja dari alat pengukur jarak air ini adalah sensor HC-SR04 bekerja secara otomatis mendeteksi jarak. Apabila sensor mendeteksi jarak air < dari 3 cm maka arduino akan memerintah LCD untuk menampilkan kata “PINTU TERBUKA” serta motor servo bergerak membuka pintu. Apabila sensor mendeteksi jarak air dari 4-7 cm maka arduino akan memerintah LCD untuk menampilkan kata “AMAN” dan jika jarak airnya > dari 8 cm maka “PINTU TERTUTUP” serta memerintah motor servo, sehingga bergerak untuk meutup pintui.
2. Alat ini merupakan pengembangan dari pemanfaatan Arduino Uno yang merupakan mikrokontroller, sebagai pengendali pintu air dengan memanfaatkan sensor HC-SR04 sebagai komponen yang mendeteksi jarak air. Dengan alat pengendali pintu air otomatis, perusahaan tidak perlu payah melakukan hal tersebut. Secara sederhana ketika ada banjir maka sensor HC- SR04 akan membaca jarak dari air ke sensor maka pintu bekerja secara otomatis dan Saat air tersebut surut maka, sensor jarak akan membaca jarak airnya maka pintu dam tertutup secara otomatis Dengan alat ini diharapkan dapat meningkatkan mobilitas perusahaan perairan.
3. Setelah dilakukan pengujian alat pintu air pengendali banjir secara otomatis dengan menggunakan sensor HC-SR04 maka alat tersebut bekerja dengan baik (berhasil) dalam membuka dan menutup pintu air sesuai dengan perancangan yang telah dibuat dan sensor debitnya berfungsi untuk mengukur kecepatan air yang masuk ke dalam bak.
4 Sensor debit dan sensor jarak adalah Alat yang dibuat bekerja secara otomatis dan menggunakan bahasa pemrograman untuk memerintah sensor jarak untuk membuka dan menutup pintu. Sensor debit ini bekerja untuk mengukur kecepatan debit air yang masuk ke dalam wadah.
5.2 Saran
Dari hasil Tugas Akhir ini masih terdapat beberapa kekurangan dan dimungkinkan untuk pengembangan lebih lanjut. Oleh karenanya penulis merasa perlu untuk memberi saran sebagai berikut:
1. Dengan menggunakan sensor HC-SR04 akan lebih mempercepat proses pengukuran jarak tingkat ketinggian maupun tingkat kerendahan permukaan perairan.
2. Diharapkan untuk pembuatan alat pengendali pintu air selanjutnya lebih memunculkan ide ide baru dan menggunakan peralatan yang lebih canggih lagi.
3. Bentuk desain alat yang lebih simpel lagi agar lebih efisien
4. Alat ini bisa diterapkan di kehidupan sehari-hari karena dapat membantu masyarakat untuk mengatur debit air yang digunakan, sehingga air yang dikeluarkan bisa sesuai yang dibutuhkan dan tidak akan membuang air dengan sia-sia.
DAFTAR PUSTAKA
Budiharto,Widodo dan Sigit Firmansyah. 2010. Elektronika digital dan mikroprosesor. Yogyakarta: ANDI
Woollard, Barry. 2003. Elektronika Praktis. Jakarta: Pradnya Paramita Bishop, Owen. 2004. Dasar-Dasar Elektronika. Jakarta: Erlangga
Zulkifli, Arif. 2014. Dasar-Dasar Ilmu Lingkungan. Jakarta: Salemba Teknika http://www.Sparkfun.com.categories protoboard
Diakses pada Tanggal : 10/02/2018, Pukul : 16:47
http://belajar-dasar-pemrograman.blogspot.co.id/2013/03/arduino-uno.html Diakses pada Tanggal : 10/02/2018, Pukul : 16:10
http:// id.m.wikipedia.org,wiki,diode.
Diakses pada Tanggal : 11/02/2018, Pukul : 20:37
https://www.google.co.id/search?q=resistor+330+ohm&oq=resi&aqs=chrome.
Diakses pada Tanggal : 18/02/2018, Pukul : 15:15
https://tokoonline88.com/kabel-jumper-breadboard-male-to-male-mudah-dan praktis-penggunaannya.
Diakses pada Tanggal : 20/02/2018, Pukul : 09:35
http:// depokinstruments.files.wordpress.com/2016/02/hc-sr04-fb.jpg Diakses pada Tanggal : 21/02/2018, Pukul : 15:15
https:// www.leselektronika.com/2012/06/liguid-crystal-display-lcd-16-x-2.html Diakses pada Tanggal 24/02/2018, Pukul : 21:05