Metode alternating projection mengubah masalah feasibility non konveks menjadi masalah feasibility konveks. Pada bab ini akan dicari matriks definit positif dan simetri X,Y yang digunakan untuk membentuk model tereduksi sistem LPV dengan menggunakan metode alternating projection.
Dalam bab ini teori alternating projection dipaparkan dalam subbab IV.1.
Selanjutnya pemanfaatan metode ini pada masalah reduksi orde model disajikan pada subbab IV.2. Algoritma metode ini disajikan dalam subbab IV.3. Bukti bahwa metode ini tetap mempertahankan kestabilan sistem tereduksi disajikan dalam subbab IV.4. Berikutnya dalam subbab IV.5 diberikan simulasi program berdasarkan metode diatas.
IV.1 Metode Alternating Projection
Metode alternating projection adalah prosedur iteratif untuk mencari titik yang berada di suatu irisan beberapa himpunan konveks yang tutup. Metode ini memberikan alternatif perhitungan numerik yang lebih sederhana dan lebih efisien dibandingkan dengan metode konveks lain dalam menyelesaikan non smooth convex problems. Dalam metode alternating projection, struktur sederhana dari kendala-kendala yang ada didapat dari rumus masing-masing proyeksi pada tiap himpunan kendala. Metode alternating projection mengubah masalah feasibility non konveks menjadi masalah feasibility konveks [5]. Beberapa kasus telah berhasil diselesaikan dengan menggunakan metode alternating projection, diantaranya adalah image recontruction, statistical estimation, covariance control, desain pengontrol berorde tetap, dan masalah reduksi orde model norm H∞[17].
Diberikan H ruang Hilbert berdimensi hingga, dengan ⋅ adalah norm dari H yang diinduksi dari hasil kali dalam ⋅ ⋅, . Dalam tesis ini akan diselesaikan masalah feasibility sebagai berikut.
Diberikan keluarga himpunan-himpunan tutup Qα∈H , dengan α∈ ℑ untuk sebuah himpunan indeks ℑ . Akan dicari titik x*∈H sedemikian sehingga
*
A
x Q Qα
α∈
∈ =
I
.Untuk suatu vektor ˆx∈H , operator proyeksi PQα pada himpunan Qα didefinisikan sebagai PQα
( )
xˆ := ∈x Qα, sedemikian sehinggaˆ Q
( )
ˆ inf ˆ(
ˆ,)
y Q
x Pα x x y x Q
α ρ α
− = ∈ − = . (IV.1) Proyeksi pada himpunan konveks adalah tunggal.
{ }
Pα dengan α∈ ℑ disebutdengan putaran proyeksi. Barisan alternating projection
{ }
xn n∞=0 diberikan oleh xn+1 =xn +λn(
Pα( )n( )
xn −xn)
, 0≤λn ≤2, (IV.2) dengan ( )( )
( )n( )
n n
n Q
P x P x
α = α .
Khususnya untuk λn = didapat 1
xn+1=Pα( )n
( )
xn . (IV.3) Urutan putaran himpunan indeks ℑ dalam barisan alternating projection (IV.2) diatur dengan urutan sebagai berikut. Misalkan ℑ ={
α α1, 2,...,αm}
, makaα
( )
n =αn(
modm)
+1 , (IV.4) dengan n(
modm)
adalah sisa yang didapat dari membagi n dengan m. Terkaitdengan (IV.1), didefinisikan
(
n, ( )n)
sup(
n,) ( )
nA
x Qα x Qα x
ρ α ρ
∈
= = Φ . (IV.5) Dalam teorema berikut akan ditunjukkan bahwa barisan alternating projection
{ }
xn ∞n=0 konvergen ke sebuah titik *A
x Q Qα
α∈
∈ =
I
untuk Qα himpunan konveks untuk semua α dan Q tak kosong [11].Teorema IV.1 Diberikan himpunan Qα tutup dan konveks dengan
A
Q Qα
α∈
=
I
tak kosong dan 0≤ ≤ε1 λn ≤ −2 ε2, dengan ε2 > . Misalkan kondisi-kondisi 0 berikut dipenuhi :
(a)
0
A
Qα Qα
αα α∈
≠
⎛ ⎞
⎜ ⎟
∩ ⎜⎜⎝
I
⎟⎟⎠ tak kosong, dengan0
A
Qα
αα α∈
≠
⎛ ⎞
⎜ ⎟
⎜ ⎟
⎜ ⎟
⎝
I
⎠ menotasikan himpunan titik- titik interior dariA
Qα
αα α∈
≠
⎛ ⎞
⎜ ⎟
⎜ ⎟
⎜ ⎟
⎝
I
⎠.(b) Qα konveks seragam untuk semua Qα dengan α α≠ , yaitu terdapat fungsi δ τ
( )
>0 dengan τ >0 sedemikian sehingga untuk ,x y∈Qαberakibat z∈Qα untuk semua z dengan
( )
2 x y
z− + ≤δ x−y . (c) H berdimensi hingga.
(d) ℑ =
{
α α1, 2,...,αm}
berhingga, dan semua Qα memenuhi Qα ={
x c xi, ≤βi}
.Maka, untuk sembarang nilai awal x , barisan alternating projection 0
{ }
xn n∞=0konvergen ke sebuah titik *
A
x Q Qα
α∈
∈ =
I
.Untuk membuktikan Teorema IV.1 diatas, terlebih dahulu dipaparkan lemma- lemma berikut yang akan digunakan dalam pembuktian [11].
Lemma IV.1 Diberikan titik x∈H dengan proyeksi x pada himpunan Q dinotasikan dengan P x
( )
, maka vektor x−P x( )
memenuhix−P x
( )
,y−P x( )
≤ , (IV.6) 0 untuk semua y∈ . QBukti :
Karena Q konveks, maka untuk 0< <λ 1 berlaku
λy+ −
(
1 λ) ( )
P x ∈Q,sehingga dari definisi proyeksi didapat
( ) ( ) ( )
( ) ( ) ( ) ( )
2 2
2 2 2
1
2 , ,
x P x x y P x
x P x P x y x P x P x y
λ λ
λ λ
− ≤ − + −
≤ − + − + − −
sehingga
( )
,( )
1( )
2x−P x y−P x ≤ 2λ P x −y . Dengan mengambil λ→0, maka didapat x−P x
( )
,y−P x( )
≤ . 0Lemma IV.2 Diberikan titik x y, ∈H dengan proyeksi x dan y pada himpunan Q berturut-turut dinotasikan dengan P x
( )
dan P y( )
. Maka, operator proyeksi P memenuhiP x
( )
−P y( )
≤ −x y . (IV.7)Bukti:
Dengan mengaplikasikan persamaan (IV.6) dua kali didapat
x−P x
( ) ( )
,P y −P x( )
≤ dan 0 y−P y( ) ( )
,P x −P y( )
≤ . 0Tambahkan kedua ketaksamaan diatas diperoleh
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
2
2
0 ,
. x y P x P y P x P y
x y P x P y P x P y
≥ − − + −
≥ − − − + −
Sehingga diperoleh P x
( )
−P y( )
≤ −x y .
Lemma IV.3 Diberikan barisan alternating projection
{ }
xn n∞=0, denganxn+1 =xn +λn
(
Pα( )n( )
xn −xn)
, 0≤λn ≤2.Untuk sembarang pemilihan α
( )
n , untuk setiap titik kekonvergenanA
x Q Qα
α∈
∈ =
I
, dan untuk semua n berlakuxn+1− ≤x xn− . (IV.8) x
Bukti :
Dengan menggunakan ketaksamaan (IV.6) untuk himpunan Qα( )n dan syarat 0≤λn ≤ , didapat untuk x Q2 ∈ ,
( )
( )
( )
( )
( )
( )( )
( )
( )( )
( )( )
( )( )
( )
( )( )
2 2 1
2 2 2
2 2 2
2 2
2
= 2 ,
= 2 2 ,
2 .
n n n n
n n
n n n n n n
n n n n
n n n n n n
n n n n n n
n n n
n n n
n
x x x P x x x
x x P x x x x P x x
x x P x x P x x P x x
x x P x x
x x
α
α α
α α α
α
λ
λ λ
λ λ λ
λ λ
+ − = + − −
− + − + − −
− + − − + − −
≤ − − − −
≤ −
Terbukti xn+1− ≤x xn− . x
Lemma IV.4 Diberikan barisan alternating projection
{ }
xn n∞=0 denganxn+1=xn+λn
(
Pα( )n( )
xn −xn)
, 0≤λn ≤2, α( )
n =αn(
modm)
+1,dan 0≤ ≤ε1 λn ≤ −2 ε2, dengan ε2 > . Maka, berlaku 0 nlim→∞Φ
( )
xn =0 dengan( )
n sup(
n,)
A
x x Qα
α ρ
∈
Φ = . (IV.9)
Bukti :
Menggunakan Lemma IV.3 dengan x=PQ
( )
xn didapatρ
(
x Qn,)
= xn−PQ( )
xn ≥ xn+1−PQ( )
xn ≥ xn+1−PQ( ) (
xn+1 =ρ xn+1,Q)
.Jadi ρ
(
x Qn,)
turun monoton, sehingga terdapat ρ =nlim→∞ρ( )
x Qn, , ρ ≥ . 0Lebih lanjut,
( ) ( ) ( ) ( )
( ) ( )
( ) (
( )( ) ) ( )
2 2
2 2 1 1 1
2 2
1
2 2
, ,
n n n n n n
Q Q
n n n n
Q Q
n n n n n n
Q n n Q
x Q x Q x P x x P x
x P x x P x
x P x x Pα x x P x
ρ ρ
λ
+ + +
+
− = − − −
≥ − − −
= − − + − −
( ) ( )
( )( )
( )
( )( )
( )
( )( )
2 2 2
2
2
2 , 2
n n n n n n
Q Q n n
n n n n
n Q n
n n
n n n
x P x x P x P x x
x P x P x x
P x x
α α
α
λ λ
λ λ
= − − − − −
− − −
= − −
( )
( ) ( )
( )( )
(
2)
( )( )
22 , 2 .
n n n n
n n Q n
n n
n n n
P x x P x P x
P x x
α α
α
λ λ λ
+ − −
≥ − −
Dengan menggunakan Lemma IV.1 dan 0≤ ≤ε1 λn ≤ −2 ε2, didapat ρ2
(
x Qn,) (
−ρ2 xn+1,Q)
≥ε ε1 2 Pα( )n( )
xn −xn 2.Dan berdasarkan fakta ρ
(
x Qn,)
→ , didapat ρ ρ(
x Qn, α( )n)
= xn−Pα( )n( )
xn →0.Selanjutnya untuk ε >0 tertentu, dipilih N sedemikian sehingga
(
x Qn, α( )n)
2εmρ ≤ untuk semua n≥N. Sehingga untuk n≥N didapat
xn+1−xn =λn Pα( )n
( )
xn −xn =λ ρn(
x Qn, α( )n)
≤mε .Untuk setiap 1 i≤ ≤m dapat dicari k<m sedemikian sehingga α
(
n+k)
=αi. Sehingga untuk n≥N diperoleh
( ) ( )
( )( )
( )
( )
( )
( )
1 1
,
....
. 2
i i
n n n n n
Q n k
n n k n k n
n k
n n n k n k n k n
n k
x Q x P x x P x
x x x P x
x x x x x P x
km m
α α α
α
α
ρ
ε ε ε
+
+ +
+
+ + − + +
+
= − = −
≤ − + −
≤ − + + − + −
≤ + <
Sehingga
( )
max(
, i)
n n
i
x ρ x Qα ε
Φ = < , yang berakibat nlim→∞Φ
( )
xn =0.Lemma IV.5 Jika syarat-syarat (a) – (d) dalam Teorema IV.1 dipenuhi, maka untuk suatu barisan terbatas
{ }
xn n∞=0 yang memenuhi Lemma IV.4, kondisi berikut dipenuhinlim→∞ρ
( )
x Qn, = . (IV.10) 0 Bukti :Misalkan kondisi (a) dipenuhi. Pilih
0
A
x Qα Qα
αα α∈
≠
⎛ ⎞
⎜ ⎟
∈ ∩ ⎜⎜⎝
I
⎟⎟⎠ dan δ >0 sedemikiansehingga z∈Qα untuk semua α dengan α α≠ dan semua z− ≤x δ . Untuk y sembarang titik sedemikian sehingga ρ
(
y Q, α)
≤ε untuk semua α dengan α α≠ , dipenuhi w ε x δ y Qαε δ ε δ
= + ∈
+ + untuk semua α dengan α α≠ . Lebih lanjut,
w=ε δε+ ⎛⎜x+δε
(
y−Pα( )
y)
⎞⎟+ε δδ+ Pα( )
y =ε δε+ z+ε δδ+ Pα( )
y⎝ ⎠ ,
dengan z x δ
(
y Pα( )
y)
= +ε − . Karena z− =x δε y−Pα
( )
y ≤ , maka didapat δ z∈Qα. Jadi w adalah titik interior dari suatu interval yang mempunyai titik akhir z∈Qα dan Pα( )
y ∈Qα , sehingga w∈Qα . Ambil y=Pα( )
xn dan pilih( )
2 xn
ε = Φ , maka untuk α α≠ didapat
( ) ( ) ( )
( ) ( )
,
, ,
.
2 2
n n n n
n n
y Q y P x y x x P x
x Q x Q
α α α
α α
ρ
ρ ρ
ε ε ε
≤ − ≤ − + −
= +
≤ + =
Sehingga jika dipilih bentuk w seperti datas, didapat w∈Qα untuk semua α dengan α α≠ . Tetapi karena x Q∈ α dan y∈Qα, maka w∈Qα juga. Sehingga
w∈ . Oleh karena itu, Q
( )
,2
2
1 1
.
2 2
n n n
n
x Q x w x y y w
y x x x
R c
ρ
ε ε ε δ ε ε
δ
ε ε
δ
≤ − ≤ − + −
≤ + −
+
≤ + −
⎛ ⎞
≤ ⎜⎝ + ⎟⎠=
Jadi
( )
n,( )
n , dengan 1 2Rx Q c x c
ρ ≤ Φ = + δ . Karena nlim→∞Φ
( )
xn =0 maka( )
lim n, 0
n
ρ x Q
→∞ = .
Misalkan kondisi (b) dipenuhi. Andaikan Lemma IV.5 tidak dipenuhi, yaitu terdapat subbarisan
{ }
xnk sedemikian sehingga nlim→∞ρ(
xnk,Q)
= > . Pilih ρ 0min , , 0
4 4
ρ ρ
ε = ⎧⎨⎩ δ⎛ ⎞⎜ ⎟⎝ ⎠⎫⎬⎭ ε > dan dicari nk =N sedemikian sehingga
( )
xN ε dan ρ(
xN,Q)
ρ2Φ ≤ ≥ . Pandang titik y=12
(
PQ( ) ( )
xN +Pα xN)
. Jelasy∈Qα . Dilain pihak untuk α α≠ , karena Qα konveks seragam, maka bola dengan pusat di 12
(
Pα( ) ( )
xN +PQ xN)
dan jari-jari δ(
Pα( ) ( )
xN +PQ xN)
berada dalam Qα. Tetapi
( ) ( ) ( ) ( )
,
2 2 4 4
N N N N N N
Q Q
Pα x P x x P x Pα x x
ρ ε ρ ρ ρ
− ≥ − − −
≥⎛ ⎞⎜ ⎟⎝ ⎠− ≥ − =
yang artinya δ
(
Pα( ) ( )
xN +PQ xN)
≥δ⎛ ⎞⎜ ⎟⎝ ⎠ρ4 ≥ε, dan
( ) ( )
( ) ( ) ( )
( ) ( )
1 1
2 2
1 1
2 2
,
2 2
N N N N
Q
N N N N
y P x P x P x P x
P x x P x x
α α α
α α
ε ε ε
− + = −
≤ − + −
≤ + =
yang artinya y∈Qα . Karena y∈Qα dan y∈Qα untuk semua α α≠ maka y∈ . Sehingga Q
( ) ( ( ) ( ) )
( ) ( )
, 1
2
1 1
2 2
N N N N N
Q
N N N N
Q
x Q x y x P x P x
x P x x P x
α α
ρ ≤ − = − +
≤ − + −
≤12ρ
(
xN,Q)
+12ε,yang berarti ρ
(
xN,Q)
≤ ≤ε ρ4 . Kontradiksi dengan asumsi ρ(
xN,Q)
≥ ρ2 .Misalkan kondisi (c) dipenuhi. Andaikan Lemma IV.5 tidak dipenuhi, yaitu terdapat subbarisan
{ }
xnk sedemikian sehingga nlim→∞ρ(
xnk,Q)
= > . Karena ρ 0 barisan{ }
xnk terbatas, maka terdapat subbarisan dari{ }
xnk sebut dengan{ }
xnkyang konvergen ke titik x . Karena * ρ
(
xnk,Qα)
→0 untuk k → ∞ untuk setiap dan Qαα tutup, maka x*∈Qα untuk semua α . Sehingga x*∈Q , yang kontradiksi dengan asumsi bahwa ρ
(
xnk,Q)
= >ρ 0.Misalkan kondisi (d) dipenuhi. Notasikan L adalah subruang berdimensi hingga yang memuat x dan dibangun oleh vektor-vektor 0 c c1, 2,...,cm . Kemudian
notasikan xn adalah proyeksi xn pada L. Maka,
(
x Qn, i) (
xn,Qi)
,( ) ( )
x Qn, xn,Qρ =ρ ρ =ρ . Sehingga Lemma IV.5 cukup
dibuktikan pada ruang berdimensi hingga L. Dalam kasus ini asumsi berikut dipenuhi :
ρ
( ) ( )
xn,Q =ρ x Qn, ≤cmaxi ρ(
x Qn, i)
=cmaxi ρ(
xn,Qi) ( )
= Φc xn .Sehingga karena nlim→∞Φ
( )
xn =0 , maka nlim→∞Φ( )
xn =0 , yang berakibat( )
lim n, 0
n
x Q
→∞ρ = .
Lemma IV.6 Untuk suatu himpunan tutup dan konveks Q dan untuk suatu x n yang memenuhi (IV.7) dan (IV.9), x konvergen ke n x*∈Q.
Bukti:
Notasikan S x
(
,ρ bola dengan pusat pada titik x dan jari-jari)
ρ . Pandang( ) ( )
( )
0
, ,
=
=
I
m n nm Q
n
S S P x ρ x Q , maka himpunan S konveks, tutup, tak kosong m (karena dalam (IV.8) xm−PQ
( )
xn ≤ρ(
x Qn,)
untuk semua n≤m , artinya∈
m
x S ), dan m Sm+1⊂S . Karena barisan himpunan memiliki irisan yang tak m kosong, maka misalkan *
0
∞
=
∈
I
n nx S . Dan karena x*∈S P
(
Q( ) (
xn ,ρ x Qn,) )
,didapat
xn−x* ≤ xn−PQ
( )
xn + PQ( )
xn −x* ≤2ρ(
x Qn,)
.Sehingga karena nlim→∞ρ
( )
x Qn, = , maka 0 xn−x* =0.Bukti Teorema IV.1
Berdasarkan Lemma IV.4, dengan asumsi kondisi (IV.4) dipenuhi, maka metode alternating projection memenuhi
nlim→∞Φ
( )
xn =0, dengan( )
n sup(
n,)
A
x x Qα
α ρ
∈
Φ = . (A)
Dan berdasarkan Lemma IV.5, karena kondisi (a) – (d) dipenuhi, maka untuk sembarang barisan terbatas yang memenuhi (A) berlaku
nlim→∞ρ
( )
x Qn, = . (B) 0 Selanjutnya berdasarkan Lemma IV.3, maka dalam metode alternating projection untuk suatu pemilihan α( )
n dan untuk setiap titik kekonvergenan∈
∈ =
I
Ax Q Qα
α
serta untuk semua n dipenuhi
xn+1− ≤x xn−x . (C) Maka, dari (A), (B), (C) dan berdasarkan Lemma IV.6, x konvergen ke n x∈Q .
Dalam hal tidak semua himpunan Qα konveks, kekonvergenan barisan alternating projection hanya terjadi secara lokal [5]. Sehingga nilai awal dalam barisan alternating projection harus dipilih berada dalam lingkungan dari solusi feasible. Dalam subbab II.5 [8,17], model tereduksi Ω adalah solusi feasible balr untuk masalah reduksi orde model sistem LPV dengan pendekatan error
1
2 ˆ
n j j k
γ σ
= +
=
∑
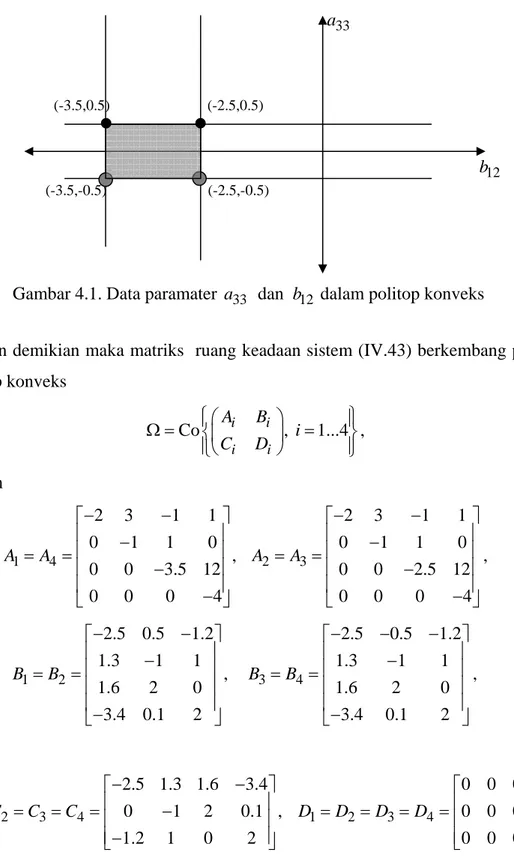
. Lebih lanjut, kendala (II.29) – (II.31) similar dengan kendala(III.40) – (III.42) dalam Teorema III.1, yaitu untuk sembarang solusi X,Y dari persamaan (III.40) – (III.42), maka P=γX−1, Q=γY akan memenuhi kendala (II.29) – (II.31). Untuk sistem LPV politopik (II.3)-(II.13) dengan
( )
, 1, 2,...T si i= L adalah sistem LTI pada titik-titik sudut dari politop Ω dan
( ( ) )
1 k T si
σ + adalah nilai singular Hankel terbesar ke
(
k+1)
dari T si( )
, makaγopt dari masalah reduksi orde model sistem LPV berada pada interval
[
γlb , γub]
,dengan 1
( ( ) )
1,..,
lb max k i
i L
γ σ + T s
= = dan
1
ˆ 2
n
ub j
j k
γ σ
= +
=
∑
, γlb dan γub berturut-turut menotasikan batas bawah dan batas atas dari γopt. Sehingga didapat kondisi awal dari barisan alternating projection yang berada dalam lingkungan kekonvergenan dari solusi feasible, yaitu 0 ubˆ 1 dan 0 1 ˆ
ub
X γ Y
− γ
= Σ = Σ .
IV.2 Penerapan Metode Alternating Projection pada Masalah Reduksi Orde Model
Subbab ini akan mengulas penerapan metode alternating projection pada masalah reduksi orde model sistem LPV sebagaimana telah dirumuskan dalam subbab III.1 dan III.3. Berdasarkan Teorema III.1, untuk mendapatkan bentuk model tereduksi perlu dicari pasangan matriks X Y, ∈ n n× yang definit positif dan simetri yang memenuhi kendala-kendala LMI (III.40) – (III.43). Pasangan matriks X Y, ∈ n n× tersebut akan dicari dengan menggunakan metode alternating projection.
Untuk suatu matriks X Y, ∈ m n× , didefinisikan norm dan hasil kali dalam Frobenius sebagai
X Y, : Tr=
( )
X YT ,1 2
1 1
:
m n F ij
i j
X x
= =
⎡ ⎤
⎢ ⎥
=⎢⎣
∑∑
⎥⎦ .Selanjutnya didefinisikan himpunan-himpunan kendala yang bersesuaian dengan kendala-kendala (III.40) – (III.43) dalam Teorema III.1 sebagai berikut.
1 : ,
T
i i i
n n
a T
i
A X XA XB
C X X I I
B X I
δ δ
γ
⎧ × ⎡ + ⎤ ⎫
⎪ ⎢ ⎥ ⎪
=⎨ ∈ ≥ ≤ − ⎬
⎢ − ⎥
⎪ ⎣ ⎦ ⎪
⎩ ⎭
,
1 : ,
T T
n n i i i
b
i
A Y YA C
C Y Y I I
C I
δ δ
γ
⎧ × ⎡ + ⎤ ⎫
⎪ ⎪
=⎨ ∈ ≥ ⎢ ⎥≤ − ⎬
⎢ − ⎥
⎪ ⎣ ⎦ ⎪
⎩ ⎭
,
2:
(
,)
n n n 0n
X I
C X Y
I Y
⎧ × ⎡ ⎤ ⎫
⎪ ⎪
=⎨ ∈ ⎢ ⎥≥ ⎬
⎣ ⎦
⎪ ⎪
⎩ ⎭,
3:
(
,)
n n rank nn
X I
C X Y n k
I Y
⎧ × ⎡ ⎤ ⎫
⎪ ⎪
=⎨ ∈ ⎢ ⎥≤ + ⎬
⎣ ⎦
⎪ ⎪
⎩ ⎭,
dengan δ >0 adalah bilangan yang sangat kecil, sehingga semua kendala diatas berupa himpunan tutup.
Metode alternating projection memerlukan ekpresi ekplisit rumus masing-masing proyeksi pada tiap himpunan kendala diatas. Berikut pembahasan tentang rumus masing-masing proyeksi pada tiap himpunan kendala.
Diberikan X Yˆ ˆ, ∈ n n× . Proyeksi orthogonal 1
( )
ˆ
Ca
P X pada himpunan C 1a dihitung melalui masalah minimisasi
1
( )
1
* ˆ arg min ˆ
a a
C X C F
X P X X X
= = ∈ − . (IV.11) Masalah minimisasi tersebut dapat diubah kedalam bentuk masalah optimisasi LMI dengan mendefinisikan variabel baru Z [3], yaitu
:
(
,)
ˆ 0ˆ
n n n n
XZ
Z X X
S X Z
X X I
× ×
⎧ ⎡ − ⎤ ⎫
⎪ ⎪
=⎨ ∈ × ⎢ ⎥≥ ⎬
⎢ − ⎥
⎪ ⎣ ⎦ ⎪
⎩ ⎭
.
Demikian juga proyeksi orthogonal 1
( )
ˆ
Cb
P Y pada himpunan C dihitung melalui 1b masalah minimisasi
1
( )
1
* ˆ arg min ˆ
b
b
C Y C F
Y P Y Y Y
= = ∈ − . (IV.12) Masalah minimisasi tersebut dapat diubah kedalam bentuk masalah optimisasi LMI dengan mendefinisikan variabel baru Z [3], yaitu
:
(
,)
ˆ 0ˆ
n n n n
YZ
Z Y Y
S Y Z
Y Y I
× ×
⎧ ⎡ − ⎤ ⎫
⎪ ⎪
=⎨ ∈ × ⎢ ⎥≥ ⎬
⎢ − ⎥
⎪ ⎣ ⎦ ⎪
⎩ ⎭
.
Ekspresi eksplisit proyeksi pada himpunan kendala C diberikan oleh lemma 2 dibawah ini [17].
Lemma IV.7 Diberikan X Yˆ ˆ, ∈ n n× , misalkan Yˆ−Xˆ = ΛL LT adalah dekomposisi nilai eigen dari ˆY−Xˆ . Proyeksi orthogonal 2
( )
ˆ ˆ,
PC X Y pada himpunan C diberikan oleh 2
Y*=
(
Yˆ+ + ΛXˆ L +LT)
2,X*=
(
Yˆ+ − ΛXˆ L +LT)
2. (IV.13)Dengan Λ adalah matriks diagonal yang didapat dengan mengganti nilai-nilai + eigen negatif dari Λ dengan nol.
Bukti :
Karena Y*−X*= ΛL +LT ≥ maka 0
(
X*,Y*)
∈C2 . Selanjutnya, untuk setiap(
X Y1, 1)
∈C2,( )( ) ( )( )
* *
* *
1 1
* *
* *
1 1
* * * *
1 1
ˆ ˆ
ˆ , ˆ
ˆ ˆ
=
T
X X X X
X X X X
Tr
Y Y Y Y
Y Y Y Y
Tr X X X X Y Y Y Y
⎛ ⎞
⎡ ⎤ ⎡ ⎤
⎡ − ⎤ ⎢ − ⎥ = ⎜⎡ − ⎤ ⎢ − ⎥⎟
⎢ ⎥ ⎢ ⎥ ⎜⎢ ⎥ ⎢ ⎥⎟
⎢ − ⎥ − ⎜⎢ − ⎥ − ⎟
⎣ ⎦ ⎣ ⎦ ⎝⎣ ⎦ ⎣ ⎦⎠
⎡ − − + − − ⎤
⎢ ⎥
⎣ ⎦
( )( )
( )( )
* * * *
1 1
1 1
1
ˆ ˆ
= 2
ˆ ˆ
= 2
=
T T
T
Tr Y X Y X Y X Y X
Tr Y X L L Y X L L
Tr L L Y L
+ +
+
⎡ − − + − − + ⎤
⎢ ⎥
⎣ ⎦
⎡ − − Λ − − Λ ⎤
⎢ ⎥
⎣ ⎦
Λ − Λ
( ) ( )
1 1 1
1 1
2 = 2
0 ,
T T T
T
L X L L Y L L X
Tr L L Y X
+ +
+
⎡ + Λ + Λ ⎤
⎣ ⎦
⎡ Λ − Λ − ⎤
⎣ ⎦
≤
karena Λ − Λ ≤+ 0 dan Y1−X1≥ . 0 Jadi
* 1 *
(
1 1)
2*
* 1
ˆ
, 0 ,
ˆ
X X
X X
X Y C
Y Y Y Y
⎡ ⎤
⎡ − ⎤ −
⎢ ⎥ ≤ ∀ ∈
⎢ ⎥
⎢ ⎥
⎢ − ⎥ −
⎣ ⎦ ⎣ ⎦
,
sehingga berdasarkan Lemma IV.1, X*,Y* adalah proyeksi orthogonal ˆ ˆX Y , pada C . 2
Selanjutnya rumus proyeksi pada himpunan kendala C diberikan oleh lemma 3 dibawah ini [17].
Lemma IV.8 Diberikan X Yˆ ˆ, ∈ n n× dan ˆY−Xˆ = ∑U VT adalah dekomposisi nilai singular dari ˆY− . Misalkan Xˆ ∑ adalah matriks diagonal yang didapat dari k
mengganti
(
n k−)
nilai singular terkecil dari ∑ dengan nol. Proyeksi orthogonal( )
3
ˆ ˆ,
PC X Y pada himpunan C diberikan oleh 3
Y*=
(
Yˆ+ + ∑Xˆ U kVT)
2,X* =
(
Yˆ+ − ∑Xˆ U kVT)
2. (IV.14)Bukti :
Untuk setiap X Y, ∈C3 didapat Y−X = ∑%U% V% untuk suatu ,T U V% % dan ∑%
dengan rank
( )
∑ ≤% k.Untuk membuktikan X* =
(
Yˆ+ − ∑Xˆ U kVT)
2, didefinisikan fungsi( )
ˆ 2
: ˆ T
F
X X f X
Y X U V
= −
− − ∑%% % .
Karena f''
( )
X ≥ , maka 0 f X( )
adalah fungsi konveks [19]. Lebih lanjut,( )
f X mencapai minimum pada X% =
(
Yˆ+ − ∑%Xˆ U% V%T)
2 dengan nilai minimum f X( )
% =1 ˆ2 Y− − ∑%Xˆ U% V%T 2F.Matriks yang paling dekat dengan ˆY− dan yang mempunyai rank Xˆ ≤k adalah
T
U∑kV . Sehingga dengan memilih U% =U, V%=V dan ∑ = ∑% k didapat X% = X* . Jadi X*=
(
Yˆ+ − ∑Xˆ U kVT)
2 adalah proyeksi orthogonalˆ pada 3
X C .
Selanjutnya untuk membuktikan Y* =
(
Yˆ+ + ∑Xˆ U kVT)
2, didefinisikan fungsi( )
ˆ 2
: ˆ T
F
Y Y f Y
X Y U V
= −
− + ∑%% % .
Karena f''
( )
Y ≥ , maka 0 f Y( )
adalah fungsi konveks [19]. Lebih lanjut, f Y( )
mencapai minimum pada Y%=
(
Yˆ+ + ∑%Xˆ U% V%T)
2 dengan nilai minimum( )
1 ˆ ˆ 22
T F
f Y% = Y− − ∑%X U% V% .
Matriks yang paling dekat dengan ˆY− dan yang mempunyai rank Xˆ ≤k adalah
T
U∑kV . Sehingga dengan memilih U% =U, V%=V dan ∑ = ∑% k didapat Y%=Y*. Jadi Y* =
(
Yˆ+ + ∑Xˆ U kVT)
2 adalah proyeksi orthogonal Y% pada C3.IV.3 Algoritma Reduksi Orde Model
Setelah didapatkan nilai awal barisan alternating projection dan ekpresi ekplisit rumus masing-masing proyeksi pada tiap himpunan kendala, maka dapat disusun algoritma reduksi orde model sistem LPV dengan menggunakan metode alternating projection sebagai berikut.
1. Pilih suatu ε sebagai batas toleransi kesalahan reduksi.
2. Definisikan sistem LPV politop
(
A B C Di, i, i, i)
, i=1...L. 3. Cari balanced realization dari sistem(
A B C Di, i, i, i)
, i=1...L.4. Cari matriks Σˆ , γub, γlb. 5. Hitung 0 ubˆ 1, 0 1 ˆ
ub
X γ Y
− γ
= Σ = Σ .
6. Uji apakah γub−γlb ≤ . Jika ε γub −γlb ≤ , maka proses selesai, lanjut ke ε langkah 11. Jika γub−γlb > lanjut ke langkah 7. ε
7. Lakukan biseksi
2
lb ub
γ γ γ = + .
8. Lakukan prosedur alternating projection sebagai berikut : 8.a Cari 1 1
( )
0Ca
X =P X dengan menyelesaikan masalah feasibility X
dalam
(
,)
ˆ 0ˆ
n n n n Z X X
X Z
X X I
× ×
⎧ ⎡ − ⎤ ⎫
⎪ ∈ × ⎢ ⎥≥ ⎪
⎨ ⎬
⎢ − ⎥
⎪ ⎣ ⎦ ⎪
⎩ ⎭
.
8.b Cari 1 1
( )
0 CbY =P Y dengan menyelesaikan masalah feasibility Y
dalam
(
,)
ˆ 0ˆ
n n n n Z Y Y
Y Z
Y Y I
× ×
⎧ ⎡ − ⎤ ⎫
⎪ ∈ × ⎢ ⎥≥ ⎪
⎨ ⎬
⎢ − ⎥
⎪ ⎣ ⎦ ⎪
⎩ ⎭
.
8.c Cari X2 dan Y dengan 2
2 1 1 , 2 1 1
2 2
T T
Y X L L Y X L L
X = + − Λ+ Y = + + Λ+ . 8.d Cari X3 dan Y dengan 3
3 2 2 , 3 2 2
2 2
T T
k k
Y X U V Y X U V
X = + − Σ Y = + + Σ .
9. Uji apakah X Y3, 3 konvergen. Jika X Y3, 3 konvergen, set
0 3 0 3
, ,
ub X X Y Y
γ =γ = = . Jika X Y tidak konvergen, set 3, 3 γlb = . γ 10. Kembali ke langkah 6.
11. Cari matriks N yang memenuhi Y−X =NNT. 12. Cari bentuk model tereduksi dari persamaan (III.44)
Secara skema, algoritma diatas dapat digambarkan sebagai berikut :