DAN DHT22 BERBASIS IOT
TUGAS AKHIR
ENJELIKA F. NADEAK 182408072
PROGRAM STUDI D3 FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM UNIVERSITAS SUMATERA UTARA
2021
DAN DHT22 BERBASIS IOT
TUGAS AKHIR
Diajukan Untuk Melengkapi Tugas Akhir Dan Memenuhi Syarat Memperoleh Gelar Ahli Madya
ENJELIKA F. NADEAK 182408072
PROGRAM STUDI D3 FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM UNIVERSITAS SUMATERA UTARA
2021
RANCANG BANGUN ALAT PENGUKUR MASSA JENIS UDARA MENGGUNAKAN SENSOR BMP180
DAN DHT22 BERBASIS IOT
TUGAS AKHIR
Saya menyatakan bahwa laporan tugas akhir ini adalah hasil karya sendiri, kecuali beberapa kutipan dan ringkasan yang masing-masing disebutkan sumbernya.
Medan, Juli 2021
Enjelika F. Nadeak 182408072
DHT22 BERBASIS IOT
ABSTRAK
Telah dilakukan perancangan alat ukur kerapatan udara dengan menggunakan sensor BMP180 dan DHT22 berbasis Internet of Things (IOT). Perancangan ini bertujuan untuk mengimplementasikan suatu alat yang dapat mengukur kerapatan udara menggunakan sensor BMP280 dan DHT22 dengan hasil yang dibandingkan dengan alat ukur standar. Alat ini bekerja dengan cara, pertama mikrokontroler menginisialisasi port yang akan digunakan untuk keperluan pembacaan sensor dan port untuk ditampilkan ke LCD. Sensor BMP180 mulai membaca tekanan udara, setelah mendeteksi tekanan udara maka sensor DHT22 membaca nilai kelembaban dan suhu. Saat tombol 1 ditekan akan menampilkan nilai tekanan udara dalam satuan hPa. Jika tombol 2 ditekan, itu akan menampilkan nilai kelembaban dengan unit yang diminta dalam %. Saat tombol 3 ditekan, yang muncul adalah nilai densitas udara.
Kata Kunci : Massa jenis udara, BMP180, DHT22.
DESIGN AND BUILD AN AIR DENSITY MEASURING DEVICE USING THE BMP180 AND DHT22 SENSORS BASED
ON IOT
ABSTRACT
The design of an air density measuring instrument using BMP180 and DHT22 sensors based on the Internet of Things (IOT) has been carried out. This design aims to implement an instrument that can measure the density of air using BMP280 and DHT22 sensors with results compared with standard measuring instruments. This tool works in a way, first the microcontroller initializes the ports that will be used for sensor reading purposes and the ports to display to the LCD. The BMP180 sensor starts reading air pressure, after detecting air pressure then the DHT22 sensor reads the humidity and temperature values. When button 1 is pressed it will display the air pressure value in hPa units. If button 2 is pressed, it will display the humidity value with the requested unit in %. When button 3 is pressed, what appears is the density value of air.
Keywords : Air density, BMP180,DHT22.
dan Maha Penyayang, dengan limpah karunia-Nya Penulis dapat menyelesaikan penyusunan laporan proyek ini dengan judul Rancang Bangun Alat Pengukur Massa Jenis Udara Menggunakan Sensor BMP180 dan DHT22 Berbasis IoT.
Dalam penyusunan laporan proyek ini tidak terlepas dukungan dari berbagai pihak. Penulis secara khusus mengucapkan terima kasih yang sebesar-besarnya kepada semua pihak yang telah membantu. Penulis banyak menerima bimbingan, petunjuk dan bantuan serta dorongan dari berbagai pihak baik yang bersifat moral maupun material. Pada kesempatan ini penulis menyampaikan rasa terima kasih yang sebesar-besarnya kepada:
1. Kedua Orang Tua tercinta serta abang, kakak, dan adik saya yang telah memberikan bantuan moral maupun materi, semangat dan doa yang begitu besar kepada penulis.
2. Ibu Dr, Nursahara Pasaribu, M.Sc selaku Dekan Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Sumatera Utara.
3. Bapak Drs.Takdir Tamba,M.Eng.Sc selaku Ketua Program Studi D-III Fisika Fakultas MIPA Universitas Sumatra Utara .
4. Bapak Lukman Hakim.S.Si.,M.Si selaku Pembimbing yang telah membimbing dan mengarahkan Kepada Penulis dalam menyelesaikan Laporan Praktek Proyek .
5. Seluruh Staf Pengajar/Pegawai Program Studi Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Sumatra Utara .
6. Orang Tua dan Saudara yang telah memberikan bantuan berupa dukungan moral dan material yang sangat membantu dalam menyelesaikan Laporan Praktek Proyek.
7. Rekan Fisika Instrumentasi D3 2018 yang memberikan bantuan penulisan untuk menyelesaikan Laporan.
Medan, Juli 2021
DAFTAR ISI
Halaman
PENGESAHAN TUGAS AKHIR i
ABSTRAK ii
ABSTRACT iii
KATA PENGHARGAAN iv
DAFTAR ISI v
DAFTAR GAMBAR vi
DAFTAR TABEL vii
BAB 1 PENDAHULUAN 1
1.1 Latar Belakang 1
1.2 Rumusan Masalah 2
1.3 Batasan Masalah 2
1.4 Tujuan 3
1.5 Manfaat Penelitian 3
1.6 Metode Penelitian 3 1.7 Sistematika Penulisan 4
BAB 2 LANDASAN TEORI 6
BAB 3 PERANCANGAN DAN PEMBUATAN PROYEK 31
3.1 Metodologi Perancangan 31
3.2 Diagram Blok 32 3.3 Perancangan Antar Muka Setiap Blok Diagram 33 3.4 Perancangan dan Pembuatan PCB 37
3.5 Flowchart 41
3.6 Pengujian Komponen 42
BAB 4 PEMBAHASAN DAN HASIL PENGUKURAN 47 4.1 Pengujian Sensor 47
BAB 5 PENUTUP 49
5.1 Kesimpulan 49
5.2 Saran 49
DAFTAR PUSTAKA 51
LAMPIRAN 52
DAFTAR GAMBAR
Nomor Judul Halaman
Gambar
2.1 Sensor BMP180 8
2.2 Sensor DHT22 9
2.3 ArduinoUno 11
2.4 Peta memori program ATmega 328 14
2.5 Memori data 15
2.6 LCD 21
3.1 Diagram blok alat 32
3.2 Rangkaian Power supply dengan Arduino Uno 33
3.3 Skematik Rangkaian LCD 34
3.4 Skematik Rangkaian DHT22 35
3.5 Skematik Rangkaian BMP180 35
3.6 Skematik Rangkaian push button 36
3.7 Skematik Rangkaian Esp 8266 37
3.8 Gambar PCB 41
3.9 Flowchart 42
3.10 Pengecekan Board 43
3.11 Pengecekan serial port 43 3.12 Hasil Esp8266 44
3.13 Pengujian LCD 46 3.14 Rangkaian system secara keseluruhan 46 4.1 Thermohygrobarometer 47 4.2 Pengujian Alat Ukur Massa Jenis Udara 48
Nomor Judul Halaman Tabel
2.1 Konfigurasi pin LCD 21
4.1 Data penunjukan alat ukur massa jenis
Udara mahasiswa 48
4.2 Data penunjukan alat ukur termohygro-
barometer 48
1.1 Latar Belakang
Massa jenis udara adalah massa per satuan volume gas atmosfer . Hal ini dilambangkan dengan huruf Yunani rho (ρ) . Kepadatan udara tergantung pada suhu dan tekanan udara . Satuan SI massa jenis udara adalah kilogram per meter kubik (kg/m3). Massa jenis udara merupakan salah satu besaran yang diperhitungkan untuk menentukan koreksi dalam proses pengujian alat ukur di laboratorium massa dan volume. Selama ini pada penerapannya di laboratorium massa, volume, dan tekanan, nilai massa jenis udara didapat dengan tiga cara. Cara pertama, nilai massa jenis udara didapatkan dari perhitungan manual berdasarkan hasil pengukuran termohygrometer dan barometer. Cara kedua, nilai massa jenis udara langsung diasumsikan sama dengan nilai massa jenis udara rata-rata menurut International Standard Atmosphere yaitu 1.2 kg/m3. Berdasarkan acuan tersebut penulis membuat suatu alat yang dapat memudahkan dalam pengukuran massa jenis udara secara digital sehingga tidak perlu dilakukan secara manual yang membutuhkan waktu cukup lama, kini dapat mengukur massa jenis udara dengan cepat dan akurat. Dasar pengambilan judul Projek akhir ini adalah untuk mengetahui massa jenis udara pada saat sedang melakukan pengujian di laboratorium massa maupun volume dengan menggunakan sensor BMP180 sebagai sensor tekanan udara dan sensor DHT22 sebagai sensor kelembaban dan suhu berbasis ARDUINO, dimana ketiga variabel tersebut akan dikalkulasikan menjadi massa jenis udara yang kemudian hasil pembacaan data akan ditampilkan pada LCD Character 16x2. Hasil data pendeteksi ini dapat langsung diketahui secara cepat dalam satuan kg/m3. Alat ini bekerja dengan cara kedua sensornya akan mendeteksi suhu, kelembaban dan tekanan udara, kemudian mikrokontroller arduino akan mengolah data menjadi nilai massa jenis udara. Setelah itu mikrokontroller arduino akan mengirimkan data berupa nilai massa jenis udara ke LCD
di aplikasi Blynk yang telah di instal di smartphone dengan bantuan Esp8266. Esp8266 memiliki kemampuan on-board prosesing dan storage yang suatu chip diintegrasikan dengan sensor-sensor atau dengan alat tertentu melalui pin input output hanya dengan pemrograman singkat.
Sensor DHT22 memiliki 2 nilai keluaran yaitu suhu dan kelembaban. Hasil pengukuran suhu dengan satuan derajat celcius (oC) dan kelembaban dengan satuan persen Relative Humadity (%RH). Pada saat pengukuran, terjadi perbedaan hasil pada nilai keluaran sensor dan keluaran dari alat digital thermohygrobarometer yang cukup kecil, sehingga menyebabkan error yang kecil. Perubahan hasil yang ditampilkan merupakan pengaruh dari cuaca sekitarnya menggunakan sensor BMP180. Sensor ini menggunakan sistem wiring serial data dan serial clock untuk mendapatkan hasil informasi tekanan udara yang akan diolah oleh mikrokontroller. Pada hasil pengujian diketahui bahwa sensor DHT22 sudah dapat membaca suhu dengan presisi.
Dalam penggunaan alat ini, kebanyakan pemakai hanya mengetahui fungsi dasarnya saja tanpa disadari bahwa alat ini masih mempunyai kegunaan yng dapat dikembangkan untuk menghasilkan fungsi lain yang sangat penting.
Oleh sebab itu penulis mencoba untuk membuat suatu alat yang berjudul
“Rancang Bangun Alat Pengukur Massa Jenis Udara Menggunakan Sensor BMP180 dan DHT22 Berbasis IoT”.
1.2 Rumusan Masalah
Berdasarkan latar belakang tersebut maka dapat dirumuskan permasalahan sebagai Berikut:
1. Bagaimana merancang sebuah alat pengukur massa jenis udara.
2. Bagaimana sistem pengendalian agar dapat terintegrasi ke handphone.
3. Apakah sistem monitoring berjalan dengan baik.
1.3 Batasan Masalah
Mengingat pembahasan dalam perancangan alat yang dibuat dapat meluas maka tulisan ini mempunyai batasan masalah sebagai berikut :
1. Arduino sebagai pengontrol yang digunakan untuk alat ukur massa jenis Udara ini.
2. Sensor yang digunakan adalah BMP280 sebagai sensor tekanan udara dan DHT22 Sebagai kelembaban dan suhu.
3. Pembahasan hanya meliputi Arduino, sensor tekanan udara dan DHT22 serta display ke LCD (Liquid Crystal Display) beserta programnya.
1.4 Tujuan
Tujuan dari projek untuk merancang dan membuat suatu instrumentasi yaitu:
1. Mengetahui cara kerja BMP280 dan DHT22 berbasis Arduino dengan Menggunakan bahasa C.
2. Mengetahui kepekaan sensor BMP280 dan DHT22 yang digunakan untuk alat Ukur massa jenis udara.
3. Mengetahui cara kerja Arduino sebagai pengendali alat ukur massa jenis udara.
1.5 Manfaat Penelitian
Adapun manfaat yang diperoleh dari alat ini yaitu:
1. Dapat digunakan utuk membandingkan hasil yang diperoleh ketika menggunakan dengan alat ukur standar.
2. Dapat mengaplikasikan secara nyata dalam ilmu pengetahuan dan teknologi Yang telah diperoleh dibangku kuliah.
1.6 Metode Penelitian
Dalam menyelesaikan tugas akhir ini, langkah-langkah yang dilakukan adalah sebagai berikut :
1. Studi Literatur dan Diskusi
Merupakan metode yang dilakukan oleh penulis dengan membaca buku, diskusi dengan dosen pembimbing, mengunjungi dan mempelajari website.
2. Perancangan Konsep
Pada tahap ini dilakukan perancangan rangkaian sitem dan blok diagram.
Pada tahap ini dilakukan perancangan dan pembuatan Alat Pengukur Massa Jenis Udara Menggunakan Sensor BMP180 dan DHT22 Berbasis Arduino Uno
4. Analisis dan Pengujian
Metode Analisis dan Pengujian dimaksudkan untuk mengetahui sejauh mana alat yang dibuat pada tugas akhir ini dapat berfungsi sesuai dengan yang diharapkan
5. Penyusunan Laporan
Tahap akhir pada tugas akhir ini adalah penyusunan laporan dengan tahap- tahap diatas.
1.7 Sistematika Penulisan
Untuk mempermudah penulisan tugas Tugas Akhir ini, penulis membuat suatu sistematika penulisan yang terdiri dari :
1. BAB I: PENDAHULUAN
Bab ini akan membahas latar belakang tugas Tugas Akhir, rumusan masalah, batasan masalah, tujuan, dan sistematika penulisan.
2. BAB II: LANDASAN TEORI
Bab ini akan menjelaskan tentang teori pendukung yang digunakan untuk pembahasan.
3. BAB III: PERANCANGAN ALAT
Bab ini membahas tentang perencanaan dan pembuatan sistem secara keseluruhan.
4. BAB IV: HASIL DAN PEMBAHASAN
Bab ini berisi tentang uji coba alat yang telah dibuat, pengoperasian dan spesifikasi alat dan lain-lain.
5. BAB V: KESIMPULAN DAN SARAN
Sebagai bab terakhir penulis akan menguraikan beberapa kesimpulan dari uraian bab-bab sebelumnya, dan penulis akan berusaha memberikan saran yang bermanfaat.
2.1 Massa Jenis Udara
Massa jenis udara dapat diartikan sebagai suatu ukuran perbandingan antara massa benda dengan volume. Memiliki 3 jenis, yakni padat,cair,dan gas ketiganya tentu memiliki konsep yang berbeda-beda termasuk diantaranya berkaitan dengan faktor yang mempengaruhi besar kecilnya massa jenis zat. Dalam ilmu fisika dikenal adanya pengukuran mengenai perbandingan antara massa benda dengan volume atau lazim disebut sebagai massa jenis. Dasar pengukuran ini tak lain disebabkan adanya perbedaan kerapatan antar benda baik itu gas, cair maupun padat. Dapat diartikan sebagai suatu pengukuran kerapatan udara tiap satuan volume, massa jenis udara memiliki tingkat dentitas yang berbeda-beda. Perbedaan tersebut lazimnya dipengaruhi oleh beberapa faktor utama yakni tingkat kelembapan dan suhu serta tekanan udara.
Semakin tinggi suhu atau kelembapan suatu benda maka akan mempengaruhi peningkatan massa jenis zat, begitupun sebaliknya. Tekanan udara sangat dipengaruhi dengan densitas udara (kerapatan massa udara) atau tingkat kepadatan. Besarnya tekanan udara bergantung dengan jumlah udara diatasnya.
Ketika udara bereda di titik tertinggi maka semakin sedikit udara diatasnya, hal inilah yang menyebabkan tekanan udaraya di dataran tinggi kecil. Berbanding terbalik dengan di dataran rendah. Selain itu tekanan udara dipengaruhi oleh suhu udara, ketika suhu udara tinggi maka molekul udara akan mengembang dan volume udara akan semakin besar. Ketika volume di uadara di atas suatu tempat tetap, massa udara total akan berkurang, beratnya pun juga berkurang, sehingga memngaruhi tekanan udara yang terjadi.
Rumus yang digunakan untuk menghitung massa jenis udara adalah :
𝜌 =
𝑝𝑅 𝑠𝑝𝑒𝑠𝑖𝑓𝑖𝑘 𝑇
𝞺 = massa jenis udara (kg/m3) 𝒑 = tekanan udara (hPa)
Rspesifik = konstanta gas tertentu (J/kg·K) T = suhu (K)
Perlu diketahui bahwa massa jenis yang dimiliki udara sangatlah berbeda dengan zat padat. Kayu atau besi mempunyai kerapatan yang pada dasarnya sama.
Tapi udara tidak bisa disamakan dengan zat apapun. Semakin tinggi udara yang ada di permukaan laut, maka semakin kecil pula massa jenis yang dimiliki udara. Hal tersebut dikarenakan adanya gaya gravitasi yang semakin berkurang pada ketinggian. Gaya gravitasi akan semakin kecil ketika ketinggiannya semakin ke atas. Oleh sebab itu, jumlah udara yang mengalami penarikan juga akan berkurang.
Dibandingkan puncak gunung, jumlah udara yang ada di sekitar permukaan laut memang lebih banyak. Pada suatu ruangan yang memiliki volume sama, massa udara yang ada di sekitar laut lebih besar. Jadi massa jenis udara yang dimiliki juga lebih besar. Lain halnya udara yang ada di sekitar puncak gunung. Dimana massanya lebih kecil. Oleh karena itulah kenapa massa jenis pada udara di sekitar puncak gunung juga lebih kecil.
Pada intinya, semakin jauh dengan permukaan laut maka massa jenis fluida atau udara juga semakin kecil. Udara pada dasarnya terdiri dari molekul atau atom yang terpisah. Sehingga dapat dengan mudah bergerak. Hal inilah yang secara langsung membuat gaya gravitasi mempengaruhi jumlah udara pada suatu wilayah.
udara bisa terbang sampai tinggi? Balon udara bisa mengembang ke udara karena memiliki massa jenis dengan jumlah yang lebih kecil dibandingkan dengan massa jenis udara yang ada di sekitarnya. Prinsipnya sama dengan meniup balon. Saat meniup dengan menggunakan mulut, balon tidak akan bisa terbang. Tapi ketika ditiup dengan gas helium, maka balon bisa terbang. Hal tersebut dikarenakan udara yang berasal dari mulut adalah karbondioksida yang memiliki massa jenis sebesar 1,98 kg/m3. Dimana beratnya lebih besar dari massa jenis yang ada di udara.
Sedangkan helium hanya memiliki massa jenis 0,18 kg/m3. Udara sendiri memiliki massa jenis sebesar 1,2 kg/m3.
2.2 Sensor Tekanan BMP180
BMP180 adalah sensor tekanan barometrik (digital barometric pressure sensor) dan temperatur udara dari Bosch Sensortec yang berkinerja sangat tinggi yang dapat diaplikasikan pada berbagai perangkat. BMP180 lebih kecil (lebih hemat energi dengan konsumsi energi sangat rendah, kurang dari 3 μA), BMP180 juga menjadi menojol karena kinerjanya yang sangat stabil terlepas dari pasokan tegangan yang digunakan. BMP180 adalah sensor yang dapat mengukur tekanan atmosfer dan suhu menggunakan Arduino atau Raspberry Pi sangat sederhana. BMP180 adalah sensor Bosch BMP085 generasi berikutnya. Tidak ada perubahan yang dilakukan pada level firmware, yang memungkinkan untuk terus menggunakan pustaka dan contoh yang ada. BMP180 mengembalikan tekanan atmosfir absolut dalam Pascal (Pa). Ini akan membutuhkan konversi satuan kecil untuk menyajikan nilai terukur atau menggunakan fungsi konversi yang tersedia di beberapa perpustakaan.
Gambar 2.1 sensor BMP180
Dengan Menggunakan BMP180 didapatkan nilai tekanan udara. BMP180 adalah sensor tekanan barometrik (digital barometric pressure sensor) dari Bosch Sensortec yang berkinerja sangat tinggi. BMP180 adalah upgrade dari BMP085 dengan banyak peningkatan yang signifikan, seperti ukuran yang lebih kecil (lebih hemat energi dengan konsumsi energi sangat rendah, kurang dari 3 μA) dan penambahan antarmuka digital yang baru. BMP180 juga menjadi menonjol karena kinerjanya yang stabil terlepas dari pasokan tegangan yang digunakan.
2.2.1 Spesifikasi Sensor Tekanan BMP180
Spesifikasi dasar BMP180 antara lain sebagai berikut:
Rentang tekanan: 300 s.d. 1100 hPa
Antarmuka kendali: I2C (kecepatan transfer hingga 3,4 MHz)
Resolusi: Tekanan = 0,01 hPa, Temperatur = 0,1 °C
Rata-rata konsumsi arus (1 sampling / detik): 3μA pada mode hemat energi, 32μA pada moda resolusi tinggi
Tipikal arus puncak: 650μA (0,65 mA)
Konsumsi arus pada mode siaga: 0,1μA (tipikal)
Catu daya: 1,8 - 3,6 Volt DC (VDD)
Rentang suhu operasional: -40°C s.d. +85°C
Waktu pendeteksian tekanan: 5 msec (tipikal pada moda standar)
BMP 180 memiliki antarmuka I2C menggunakan dua kabel SDA (serial data) dan SCL (serial Clock) dengan frekuensi 3,4Mbps, pin SDA dan SCL membutuhkan pull-up resistor sebesar 4.7 KOhm. Pada antarmuka I2C ini, modul BMP 180 bertindak sebagai slave dengan alamat 0xEF untuk baca dan 0xEE untuk tulis. Semua perintah yang dikirim melalui antarmuka I2C diawali dengan start condition dan diakhiri dengan stop condition.
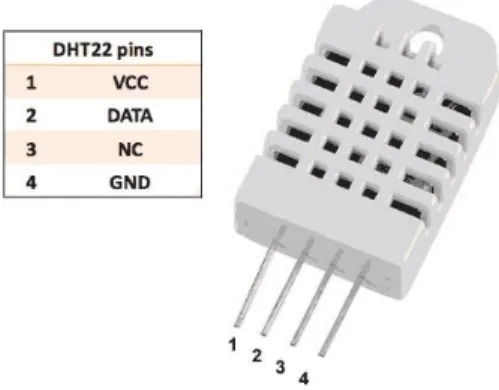
2.3 Sensor Kelembaban dan Suhu DHT22
DHT-22 atau AM2302 adalah sensor suhu dan kelembaban, sensor ini memiliki keluaran berupa sinyal digital dengan konversi dan perhitungan dilakukan oleh MCU 8-bit terpadu. Sensor ini memiliki kalibrasi akurat dengan kompensasi suhu ruang penyesuaian dengan nilai koefisien tersimpan dalam memori OTP terpadu. Sensor DHT22 memiliki rentang pengukuran suhu dan kelembaban yang luas, DHT22 mampu mentransmisikan sinyal keluaran melewati kabel hingga 20 meter sehingga sesuai untuk ditempatkan di mana saja, tapi jika kabel yang panjang di atas 2 meter harus ditambahkan buffer capacitor 0,33µF antara pin#1 (VCC) dengan pin#4 (GND).
Gambar 2.2 sensor DHT22
2.3.1 Spesifikasi Sensor Kelembaban dan Suhu DHT22
Spesifikasi Teknis sensor kelembaban dan suhu DHT22 adalah sebagai berikut :
a. Catu daya: 3,3 - 6 Volt DC (tipikal 5 VDC)
b. Sinyal keluaran: digital lewat bus tunggal dengan kecepatan 5 ms/operasi
c. Elemen pendeteksi: kapasitor polimer (polymer capacitor) d. Jenis sensor: kapasitif (capacitive sensing)
e. Rentang deteksi kelembapan : 0-100% RH (akurasi ±2% RH) f. Rentang deteksi suhu : -40° - +80° Celcius (akurasi ±0,5°C) g. Resolusi sensitivitas : 0,1%RH; 0,1°C
h. Histeresis kelembaban: ±0,3% RH
i. Stabilitas jangka panjang: ±0,5% RH / tahun j. Periode pemindaian rata-rata: 2 detik
k. Ukuran: 25,1 x 15,1 x 7,7 mm
l. Hubungkan pin#2 (data) dari sensor ini dengan pin Digital I/O pada MCU (Microcontroller Unit).
2.4 Arduino
Arduino adalah platform pembuatan prototipe elektronik yang bersifat opensource hardware yang berdasarkan pada perangkat keras dan perangkat lunak yang fleksibel dan mudah digunakan. Menurut Sulaiman (2012:1), Arduino merupakan platform yang terdiri dari software dan
hardware. Hardware Arduino sama dengan mikrocontroller pada umumnya hanya pada arduino ditambahkan penamaan pin agar mudah diingat. Software Arduino merupakan software open source sehingga dapat di download secara gratis. Software ini digunakan untuk membuat dan memasukkan kode program ke dalam Arduino. Pemrograman Arduino tidak sebanyak tahapan mikrokontroller konvensional karena Arduino sudah didesain supaya lebih mudah dipelajari, sehingga para pemula dapat mulai belajar mikrokontroller dengan Arduino.
Berdasarkan uraian diatas, dapat disimpulkan bahwa arduino merupakan platform pembuatan prototipe elektronik yang terdiri dari hardware dan softaware.
2.4.1 Arduino Uno
Arduino Uno adalah sebuah board yang menggunakan mikrokontroler ATmega328. Arduino Uno memiliki 14 pin digital (6 pin dapat digunakan sebagai output PWM), 6 input analog, sebuah 16 MHz osilato kristal, sebuah koneksi USB, sebuah konektor sumber tegangan, sebuah header ICSP, dan sebuah tombol reset. Arduino Uno memuat segala hal yang dibutuhkan untuk mendukung sebuahmikrokontroler. Hanya dengan menghubungkannya ke sebuah komputer melalui USB atau memberikan tegangan DC dari baterai atau adaptor AC ke DC sudah dapat membuanya bekerja. Arduino Uno menggunakan ATmega16U2 yang diprogram sebagai USB to serial converter untuk komunikasi serial ke komputer melalui port USB.
"Uno" berarti satu di Italia dan diberi nama untuk menandai peluncuran Arduino 1.0. Versi 1.0 menjadi versi referensi Arduino ke depannya.
Arduino Uno R3 adalah revisi terbaru dari serangkaian board Arduino, dan model referensi untuk platform Arduino. Tampak atas dari arduino uno dapat dilihat pada Gambar 2.3.
Gambar 2.3 Arduino Uno
2.4.1.1 Pin Masukan dan Keluaran Arduino Uno
Masing-masing dari 14 pin digital arduino uno dapat digunakan sebagai masukan atau keluaran menggunakan fungsi pinMode(), digitalWrite() dan digitalRead(). Setiap pin beroperasi pada tegangan 5 volt.
Setiap pin mampu menerima atau menghasilkan arus maksimum sebasar 40 mA dan memiliki 10 resistor pull-up internal (diputus secara default) sebesar 20-30 KOhm. Sebagai tambahan, beberapa pin masukan digital memiliki kegunaan khusus yaitu:
Komunikasi serial: pin 0 (RX) dan pin 1 (TX), digunakan untuk menerima (RX) dan mengirim (TX) data secara serial.
External Interrupt: pin 2 dan pin 3, pin ini dapat dikonfigurasi untuk memicu sebuah interrupt pada nilai rendah, sisi naik atau turun, atau pada saat terjadi perubahan nilai.
Pulse-width modulation (PWM): pin 3, 5, 6, 9, 10 dan 11, menyediakan keluaran PWM 8-bit dangan menggunakan fungsi analogWrite().
Serial Peripheral Interface (SPI): pin 10 (SS), 11 (MOSI), 12 (MISO) dan 13 (SCK), pin ini mendukung komunikasi SPI dengan menggunakan SPI library.
LED: pin 13, terdapat built-in LED yang terhubung ke pin digital 13. Ketika pin bernilai High maka LED menyala, sebaliknya ketika pin bernilai Low maka LED akan padam.
Arduino Uno memiliki 6 masukan analog yang diberi label A0 sampai A5, setiap pin menyediakan resolusi sebanyak 10 bit (1024 nilai yang berbeda).
Secara default pin mengukur nilai tegangan dari ground (0V) hingga 5V, walaupun begitu dimungkinkan untuk mengganti nilai batas atas dengan menggunakan pin AREF dan fungsi analogReference(). Sebagai tambahan beberapa pin masukan analog memiliki fungsi khusus yaitu pin A4 (SDA) dan pin A5 (SCL) yang digunakan untuk komunikasi Two Wire Interface (TWI) atau Inter Integrated Circuit (I2C) dengan menggunakan Wire library.
TWI: A4 atau SDA pin dan A5 atau SCL pin. Mendukung komunikasi TWI.
Aref. Referensi tegangan untuk input analog. Digunakan dengan analogReference().
Reset
2.4.1.2 Sumber Daya dan Pin Tegangan Arduino Uno
Arduino uno dapat diberi daya melalui koneksi USB (Universal Serial Bus) atau melalui power supply eksternal. Jika arduino uno dihubungkan ke kedua sumber daya tersebut secara bersamaan maka arduino uno akan memilih salah satu sumber daya secara otomatis untuk digunakan. Power supply eksternal (yang bukan melalui USB) dapat berasal dari adaptor AC ke DC atau baterai. Adaptor dapat dihubungkan ke soket power pada arduino uno. Jika menggunakan baterai, ujung kabel yang dibubungkan ke baterai dimasukkan kedalam pin GND dan Vin yang berada pada konektor power. Arduino uno dapat beroperasi pada tegangan 6 sampai 20 volt. Jika arduino uno diberi tegangan di bawah 7 volt, maka pin 5V pada board arduino akan menyediakan tegangan di bawah 5 volt dan mengakibatkan arduino uno mungkin bekerja tidak stabil. Jika diberikan tegangan melebihi
12 volt, penstabil tegangan kemungkinan akan menjadi terlalu panas dan merusak arduino uno. Tegangan rekomendasi yang diberikan ke arduino uno berkisar antara 7-12 volt.
Pin-pin catu daya adalah sebagai berikut:
menggunakan sumber daya eksternal (selain dari koneksi USB atau sumber daya yang teregulasi lainnya). Sumber tegangan juga dapat disediakan melalui pin ini jika sumber daya yang digunakan untuk arduino uno dialirkan melalui soket power.
berasal dari regulator tegangan pada arduino uno.
berasal dari regulator tegangan pada arduino uno.
2.4.1.3 Peta Memori Arduino Uno
Arduino Uno adalah arduino board yang menggunakan mikrokontroler ATmega328. Maka peta memori arduino uno sama dengan peta memori pada mikrokontroler ATmega328. ATmega328 ini memiliki 32 KB dengan 0,5 KB digunakan untuk loading file. Ia juga memiliki 2 KB dari SRAM dan 1 KB dari EEPROM.
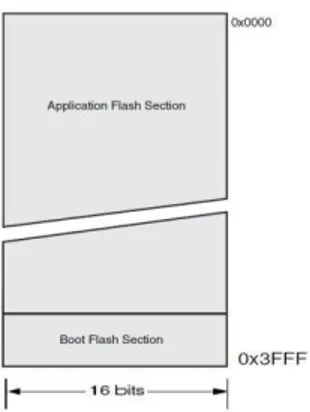
2.4.1.3.1 Memori Program
ATMega328 memiliki 32K byte On-chip In-System Reprogrammable Flash Memory untuk menyimpan program. Memori flash
seperti terlihat pada Gambar 2.4. Bootloader adalah program kecil yang bekerja pada saat sistem dimulai yang dapat memasukkan seluruh program aplikasi ke dalam memori prosesor.
Gambar 2.4 Peta Memori Program ATMega 328.
2.4.1.3.2 Memori Data
Memori data ATMega328 terbagi menjadi 4 bagian, yaitu 32 lokasi untuk register umum, 64 lokasi untuk register I/O, 160 lokasi untuk register I/O tambahan dan sisanya 2048 lokasi untuk data SRAM internal.
Register umum menempati alamat data terbawah, yaitu 0x0000 sampai 0x001F. Register I/O menempati 64 alamat berikutnya mulai dari 0x0020 hingga 0x005F. Register I/O tambahan menempati 160 alamat berikutnya mulai dari 0x0060 hingga 0x00FF. Sisa alamat berikutnya mulai dari 0x0100 hingga 0x08FF digunakan untuk SRAM internal.
Gambar 2.5 Memori Data
2.4.1.3.3 Memori Data EFFROM
Arduino uno terdiri dari 1 KByte memori data EEPROM. Pada memori EEPROM, data dapat ditulis/dibaca kembali dan ketika catu daya dimatikan, data terakhir yang ditulis pada memori EEPROM masih tersimpan pada memori ini, atau dengan kata lain memori EEPROM bersifat nonvolatile. Alamat EEPROM dimulai dari 0x000 hingga 0x3FF.
2.4.2. Arduino Ethernet Shield
Secara dasarnya shield adalah papan rangkaian yang belum disempurnakan atau dilengkapi secara keseluruhan dan dibuat dengan pin yang sesuai dengan papan arduino agar mudah saat digunakan atau dihubungkan. Arduino shield adalah sebutan untuk modul tambahan dengan berbagai fungsi, yang kebanyakan 11 pin nya cocok dengan arduino, sehingga cara menghubungkannya dengan arduino bias dengan menyusun diatas board arduino. Ethernet Shield merupakan NIC (Network Interface Card) bagi arduino sehingga data dikirim atau diterima dari jaringan komputer. Pengembang shield ini menyediakan library sehingga memudahkan programmer untuk membuat aplikasi real-time monitoring.
Keberadaan arduino shield sangatlah membantu untuk membuat proyekproyek yang lebih menarik. Mulai dari pemerintahan, pertokoan, pertanian dan lain-lain. Saat ini jenis shield sudah sangat banyak, mulai dari shield untuk prototype, Wi-Fi shield untuk berkomunikasi melalui jaringan W-LAN, Ethernet Shield untuk berkomunikasi melalui jaringan LAN, GSM/GPRS shield untuk berkomunikasi melalui jaringan GPS atau GPRS untuk memungkinkan beberapa arduino berkomunikasi secara wireless, dan masih banyak lagi yang lainnya. Dalam tugas akhir ini penulis menggunakan Arduino Ethernet Shield untuk penghubung arduino dengan server. Menurut situs www.arduino.cc, modul Ethernet shield ini memungkinkan arduino terhubung dengan internet dalam hitungan detik.
Ethernet shield berbasis chip Ethernet Wiznet W5100. Wiznet W5100
menyediakan (IP) yang mampu menyediakan komunikasi TCP dan UDP.
Untuk menggunakan Ethernet Shield pada penulisan sketch atau kode pada arduino IDE dibutuhkan library Ethernet Shield agar dapat dikenali oleh board arduino. Ethernet Shield terhubung dengan board arduino yaitu dengan header dengan kaki panjang yang menembus shield. Hal ini untuk menjaga layout pin dan memungkinkan shield lain untuk ditumpukan di atasnya.
2.4.3 Bahasa Pemrograman Arduino
Banyak bahasa pemrograman yang bisa digunakan untuk program mikrokontroler , misalnya bahasa basic, assembly,atau bahasa C. Namun dalam pemrograman Arduino bahasa yang dipakai adalah bahasa C. Bahasa C adalah bahasa yang sangat lazim dipakai sejak awal komputer diciptakan dan sangat berperan dalam perkembangan software. Bahasa C telah membuat bermacam-macam sistem opreasi dan compiler untuk banyak bahasa pemrograman. Misalnya sistem operasi unix, linux,dsb. Bahasa C adalah bahasa pemrograman yang sangat ampuh yang kekuatannya mendekati bahasa assembler.
Bahasa C menghasilkan file kode yang sangat kecil dan dieksekusi dengan sangat cepat. Karena itu, Bahasa C sering digunakan pada sistem operasi dan pemrograman mikrokontroler . Bahasa C adalah multi-platform karena bahasa C bisa diterapkan pada linkungan windows, unix , linux, atau sistem operasi lain tanpa mengalami perubahan source code. (kalaupun ada perubahan, biasanya sangat minim). Karena Arduino menggunakan bahasa C yang multi-platform, software arduino pun bisa dijalankan pada saat sitem operasi yang umum, misalnya Windows, Linux, dan MacOS. Di internet banyak Library Bahasa C untuk Arduino yang bisa di download dengan gratis. Setiap library Arduino biasanya disertai dengan contoh pemakaiannya.
Keberadaan Library-library ini bukan hanya membantu kita membuat mikrokontroler , tetapi bisa dijadikan sebagai saran untuk mendalami pemrograman bahasa C pada mikrokontroler. Berikut ini adalah
sedikit penjelasan yang ditujukan kepada anda yang hanya mampu sedikit pengalaman pemrograman dan membutuhkan penjelasan singkat mengenai karakter bahasa C dan softwarwe Arduino. Penjelasan lebih detail, lengkap , dan mendalam , lihat situs resmi Arduino.
2.4.3.1 Struktur
Setiap program arduino (biasa disebut Sketch) mempunyai dua buah fungsi yang harus ada.
Void setup () {}
Semua kode di dalam kurung kurawal akan dijalankan hanya satu kali ketika program arduino dijalankan untuk pertama kalinya.
Void loop () {}
Fungsi ini akan dijalankan setelah setup (fungsi void setup) selesai.
Setelah dijalankan satu kali fungsi ini akan dijalankan lagi, dan lagi secara terus menerus sampai catu daya (power) di lepaskan.
2.4.3.2 Konstanta
Konstanta adalah variable yang sudah ditetapkan sebelumnya dalam bahasa pemrograman arduino. Konstanta digunakan agar program lebih mudah untuk dibaca dan dimengerti. Konstanta dibagi menjadi 3 kelompok yaitu: 1. Konstanta yang digunakan untuk menunjukkan tingkat logika konstanta Boolean, yaitu true dan false 2. Konstanta untuk menunjukkan keadaan pin, yaitu HIGH dan LOW 3. Konstanta untuk menunjukkan fungsi pin, yaitu INPUT, INPUT_PULLUP dan OUTPUT Konstanta yang digunakan untuk menunjukkan benar atau salah dalam bahasa pemrograman arduino adalah true dan false. False lebih mudah didefinisikan daripada true.
False didefinisikan sebagai 0nol. True sering didefinisikan sebagai 1satu,
yang mana hal ini benar, tetapi true memiliki definisi yang lebih luas. Setiap integer yang bukan nol adalah true dalam pengertian Boolean. Jadi -2, 3 dan -100 semuanya didefinisikan sebagai true, juga dalam pengertian Boolean.
Tidak seperti konstanta yang lain true dan false diketik dengan menggunakan huruf kecil.
Ketika membaca atau menulis ke sebuah pin digital, terdapat hanya dua nilai yang dapat diberikan atau diterima, yaitu HIGH dan LOW. HIGH memiliki arti yang berbeda tergantung apakah sebuah pin dikonfigurasi menjadi masukan atau keluaran. Ketika pin dikonfigurasi sebagai masukan dengan fungsi pinMode, lalu kemudian dibaca dengan fungsi digitalRead, mikrokontroler akan melaporkan nilai HIGH jika tegangan yang ada pada pin tersebut berada pada tegangan 3 volt atau lebih.
Ketika sebuah pin dikonfigurasi sebagai masukan, dan kemudian dibuat bernilai HIGH dengan fungsi digitalWrite, maka resistor pull-up internal dari chip ATmega akan aktif, yang akan membawa pin masukan ke nilai HIGH kecuali pin tersebut ditarik pull-down ke nilai LOW oleh sirkuit dari luar. Ketika pin dikonfigurasi sebagai keluaran dengan fungsi pinMode, dan diset ke nilai HIGH dengan fungsi digitalWrite, maka pin berada pada tegangan 5 volt. Dalam keadaan ini, pin tersebut dapat memberikan arus, sebagai contoh, untuk menghidupkan LED yang terhubung seri dengan resistor dan ground, atau pin lain yang dikonfigurasi sebagai keluaran dan diberi nilai LOW. Sama seperti HIGH, LOW juga memiliki arti yang berbeda bergantung pada konfigurasi pin. Ketika pin dikonfigurasi sebagai masukan, maka mikrokontroler akam melaporkan nilai LOW jika tegangan yang terdapat pada pin berada pada tegangan 2 volt atau kurang. Ketika pin dikonfigurasi sebagai keluaran dan diberi nilai LOW maka pin berada pada tegangan 0 volt. Setiap pin pada arduino dapat dikonfigurasi sebagai masukan, masukan dengan resistor pull-up atau keluaran. Untuk mengkonfigurasi fungsi pin pada arduino digunakan konstanta INPUT, INPUT_PULLUP dan OUTPUT. Pin arduino yang dikonfigurasi sebagai masukan dengan fungsi pinMode dikatakan berada dalam kondisi berimpedansi tinggi. Pin yang dikonfigurasi sebagai masukan memiliki
permintaan yang dangat kecil kepada sikuit yang di-sampling- nya, setara dengan sebuah resistor 100 Megaohm dipasang seri dengan pin tersebut.
Hal ini membuat pin tersebut berguna untuk membaca sensor, tetapi tidak untuk menghidupkan sebuah LED. Cip ATmega pada arduino memiliki resisitor pull-up internal resistor yang terhubung ke sumber tegangan secara internal yang dapat digunakan. Untuk menggunakan resistor pull-up internal ini kita menggunakan konstatnta INPUT_PULLUP pada fungsi pinMode. Pin yang dikonfigurasi menjadi sebuah keluaran dikatakan berada dalam kondisi berimpedansi rendah. Hal ini berarti pin tersebut dapat menyediakan sejumlah besar arus ke sirkuit yang lain. Pin pada ATmega mampu menyediakan arus hingga 40 mA.
2.4.3.3 Masukan dan Keluaran Digital
Arduino memiliki 3 fungsi untuk masukan dan keluaran digital pada arduino board, yaitu pinMode, digitalWrite dan digitalRead. Fungsi pinMode Universitas Sumatera Utara mengkonfigurasi pin tertentu untuk berfungsi sebagai masukan atau keluaran. Sintaksis untuk fungsi pinMode adalah sebagai berikut: pinModepin,mode Parameter : Pin = angka dari pin digital yang akan dikonfigurasi Mode = konfigurasi yang diinginkan INPUT, INPUT_PULLUP dan OUTPUT. Fungsi digitalWrite berfungsi untuk memberikan nilai HIGH atau LOW suatu digital pin. Sintaksis untuk fungsi digitalWrite adalah sebagai berikut : DigitalWrite pin,value Parameter : Pin = angka dari pin digital yang akan dikonfigurasi Value = nilai yang diinginkan HIGH atau LOW. Fungsi digitalRead bertujuan untuk membaca nilai yang ada pada pin mikrokontroller.
2.4.4 Arduino Development Eviroment
Merupakan sebuah software untuk memprogram arduino. Pada software inilah arduino dilakukan pemrograman untuk melakukan fungsi- fungsi yang dibenamkan melalui sintaks pemrograman. Arduino menggunakan bahasa pemrograman C yang dimodifikasi. Kita sebut saja
dengan bahasa pemrograman C for Arduino. Bahasa pemrograman arduino sudah dirubah untuk memudahkan pemula dalam melakukan pemrograman dari bahasa aslinya. Didalam arduino sendiri sudah terdapat IC mikrokontroler yang sudah ditanam program yang bernama Bootloader.
Funsi dari bootloader tersebut adalah untuk menjadi penengah antara compiler arduino dan mikrokontroler.
2.5 LCD ( Liquid crystal Display)
Gambar 2.6 lcd (Liquid crystal display) Tabel 2.1. Konfigurasi Pin LCD Nomor Simbol Level Fungsi
1 Vss - 0 Volt
2 Vcc - 5 + 10% Volt
3 Vee - Penggerak LCD
4 RS H/L
H=Memasukkan Data,L=Memasukkan Ins
5 R/W H/L H=Baca,L=Tulis
6 E Enable Signal
7 DB0 H/L Data Bus
8 DB1 H/L Data Bus
9 DB2 H/L Data Bus
10 DB3 H/L Data Bus
11 DB4 H/L Data Bus
12 DB5 H/L Data Bus
13 DB6 H/L Data Bus
14 DB7 H/L Data Bus
15 V+BL Kecerahan LCC
16 V-BL Kecerahan LCC
Display elektronik adalah salah satu komponen elektronika yang berfungsi sebagai tampilan suatu data, baik karakter, huruf ataupun grafik. LCD (Liquid Cristal Display) adalah salah satu jenis display elektronik yang dibuat dengan teknologi CMOS logic yang bekerja dengan tidak menghasilkan cahaya tetapi memantulkan cahaya yang ada di sekelilingnya terhadap front-lit atau mentransmisikan cahaya dari backlit. LCD (Liquid Cristal Display) berfungsi sebagai penampil data baik dalam bentuk karakter, huruf, angka ataupun grafik.
Material LCD (Liquid Cristal Display)LCD adalah lapisan dari campuran organik antara lapisan kaca bening dengan elektroda transparan indium oksida dalam bentuk tampilan seven-segment dan lapisan elektroda pada kaca belakang.
Ketika elektroda diaktifkan dengan medan listrik (tegangan), molekul organik yang panjang dan silindris menyesuaikan diri dengan elektroda dari segmen.
Lapisan sandwich memiliki polarizer cahaya vertikal depan dan polarizer cahaya horisontal belakang yang diikuti dengan lapisan reflektor. Cahaya yang dipantulkan tidak dapat melewati molekul-molekul yang telah menyesuaikan diri dan segmen yang diaktifkan terlihat menjadi gelap dan membentuk karakter data yang ingin ditampilkan.
Register control yang terdapat dalam suatu LCD diantaranya adalah.
a. Register perintah yaitu register yang berisi perintah-perintah dari mikrokontroler ke panel LCD (Liquid Cristal Display) pada saat proses penulisan data atau tempat status dari panel LCD (Liquid Cristal Display) dapat dibaca pada saat pembacaan data.
Register data yaitu register untuk menuliskan atau membaca data dari atau keDDRAM. Penulisan data pada register akan menempatkan data tersebut keDDRAM sesuai dengan alamat yang telah diatur sebelumnya.
2.5.1 Cara Kerja Liquid Crystal Display (LCD)
Pada aplikasi umumnya RW diberi logika rendah “0”.Bus data terdiri dari 4bit atau 8 bit. Jika jalur data 4 bit maka yang digunakan ialah DB4 sampai dengan DB7. Sebagaimana terlihat pada table deskripsi,
interface LCD merupakan Universitas Sumatera Utara sebuah parallel bus, dalam hal ini sangat memudahkan dan sangat cepat dalam pembacaan dan penulisan data dari atau ke LCD. Kode ASCII yang ditampilkan sepanjang 8bit dikirim ke LCD secara 4bit atau 8bit pada satu waktu Jika mode 4bit yang digunakan, maka 2 nibble data dikirim untuk membuat sepenuhnya 8bit pertama dikirim 4bit MSB lalu 4bit LSB dengan pulsa clock EN setiap nibblenya. Jalur control EN digunakan untuk memberitahu LCD bahwa mikrokontroler mengirimkan data ke LCD. Untuk mengirim data ke LCD program harus menset EN ke kond isi high “1” dan kemudian menset dua jalur control lainnya RS dan RW atau juga mengirimkan data ke jalur data bus. Saat jalur lainnya sudah siap, EN harus diset ke “0” dan tunggu beberapa saat, dan set EN kembali ke high “1”. Ketika jalur RS berada dalam kondisi low “0”, data yang dikirimkan ke LCD dianggap sebagai sebuah perintah atau instruksi khusus seperti bersihkan layar, posisi kursor dll. Ketika RS dalam kondisi high atau “1”, data yang dikirimkan adalah data ASCII yang akan ditampilkan dilayar. Misal, untuk menampilkan huruf “A” pada layar maka RS harus diset ke “1”.
Jalur control RW harus berada dalam kondisi low 0 saat informasi pada data bus akan dituliskan ke LCD. Apabila RW berada dalam kondisi high “1”, maka program akan melakukan query data dari LCD. Instruksi pembacaan hanya satu, yaitu Get LCD status, lainnya merupakan instruksi penulisan, Jadi hamper setiap aplikasi yang menggunakan LCD, RW selalu di set ke “0”. Jalur data dapat terdiri 4 atau 8 jalur.Mengirimkan data secara parallel baik 4bit atau 8bit merupakan 2 mode operasi primer.
Untuk membuat sebuah aplikasi interface LCD, menentukan mode operasi merupakan hal yang paling penting. Mode 8bit sangat baik digunakan ketika kecepatan menjadi keutamaan dalam sebuah aplikasi dan setidaknya minimal tersedia 11 pin I0 3pin untuk control, 8pin untuk data.Sedangkan mode 4bit minimal hanya membutuhkan 7bit 3pin untuk control, 4 pin untuk data. Bit RS digunakan untuk memilih apakah data atau instruksi yang akan ditransfer antara mikrokontroler dan LCD. Jika bit ini diset RS = 1, maka byte pada posisi kursor LCD saat itu dapat dibaca atau ditulis. Jika bit ini di reset RS = 0, merupakan instruksi yang dikirim ke LCD atau status eksekusi dari instruksi terakhir yang dibaca.
2.6 Komunikasi I2C
Inter-Integrated Circuit Bus (I2C-bus atau I2C) merupakan sebuah standar de facto komunikasi serial antar IC [1]. I2C digunakan untuk menghubungkan IC mikrokontroler, sensor, I/O, dan berbagai jenis IC lainnya. Saat ini, I2C sudah diimplementasikan di lebih dari 1000 tipe IC oleh 50 lebih perusahaan [1]. I2C pada awalnya ditujukan untuk menghubungkan beragam IC dalam lingkup yang kecil (dalam sebuah papan rangkaian atau perangkat elektronik). Seiring berkembangnya jenis IC yang menggunakan komunikasi I2C, I2C kini dapat digunakan dalam jaringan sensor, aktuator, maupun jaringan kendali yang cukup luas [2].
Namun, jaringan I2C dengan media kabel tentunya kurang fleksibel untuk jaringan yang luas bila dibandingkan dengan jaringan nirkabel seperti Wireless Sensor Network (WSN).
I2C pada dasarnya didesain untuk komunikasi dengan media kabel saja. Meskipun begitu, berdasarkan spesifikasinya I2C memiliki potensi untuk diperluas menjadi jaringan hybrid (gabungan kabel dan nirkabel). Namun, hingga saat ini belum ada solusi praktis terkait hal tersebut. Tugas akhir ini membuat jembatan jaringan I2C nirkabel berbasis AVR dan nRF24L01+ sebagai solusi dari permasalahan tersebut.
Jembatan jaringan ini diharapkan mampu membangun sistem jaringan hybrid dengan protokol I2C. Pada jembatan jaringan tersebut AVR digunakan sebagai perantara jaringan I2C dengan nRF24L01+.
nRF24L01+ merupakan RF transceiver yang digunakan untuk komunikasi nirkabel sistem ini.
2.7 Android
Android adalah sistem operasi yang berbasis Linux untuk telepon seluler seperti telepon pintar dan komputer tablet. Android menyediakan platform terbuka bagi para pengembang untuk menciptakan aplikasi mereka sendiri untuk digunakan oleh bermacam peranti bergerak. Awalnya, Google Inc. membeli Android Inc., pendatang baru yang membuat peranti lunak untuk ponsel. Kemudian untuk mengembangkan Android, dibentuklah Open Handset Alliance, konsorsium dari 34 perusahaan peranti keras, peranti lunak, dan telekomunikasi, termasuk Google, HTC, Intel, Motorola, Qualcomm, T-Mobile, dan Nvidia. Pada saat perilisan perdana Android, 5 November 2007, Android bersama Open Handset Alliance menyatakan mendukung pengembangan standar terbuka pada perangkat seluler. Di lain pihak, Google merilis kode–kode Android di bawah lisensi Apache, sebuah lisensi perangkat lunak dan standar terbuka perangkat seluler. Di dunia ini terdapat dua jenis distributor sistem operasi Android. Pertama yang mendapat dukungan penuh dari Google atau Google Mail Services (GMS) dan kedua adalah yang benar–
benar bebas distribusinya tanpa dukungan langsung Google atau dikenal sebagai Open Handset Distribution.
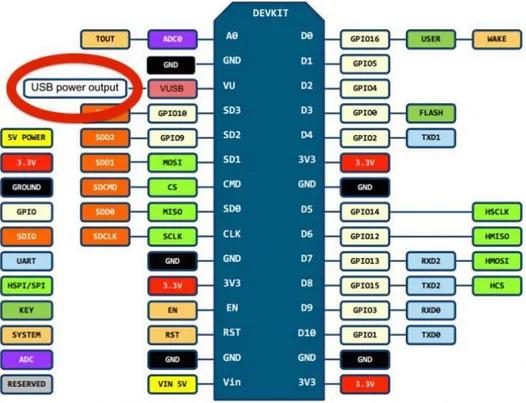
2.8 Node MCU ( Esp 8266 )
NodeMCU adalah sebuah platform IoT yang bersifat opensource. Terdiri dari perangkat keras berupa System On Chip ESP8266. dari ESP8266 buatan Espressif System, juga firmware yang digunakan, yang menggunakan bahasa pemrograman scripting Lua. [Sumardi, 2016] Istilah NodeMCU secara default sebenarnya mengacu pada firmware yang digunakan dari pada perangkat keras development kit NodeMCU bisa dianalogikan sebagai board arduino-nya ESP8266.
Sejarah lahirnya NodeMCU berdekatan dengan rilis ESP8266 pada 30 Desember 2013, Espressif Systems selaku pembuat ESP8266 memulai produksi ESP8266 yang merupakan SoC Wi-Fi yang terintegrasi dengan prosesor Tensilica Xtensa LX106. Sedangkan NodeMCU dimulai pada 13 Oktober 2014 saat Hong mecommit file pertama nodemcu-firmware ke Github. Dua bulan kemudian project tersebut dikembangkan ke platform perangkat keras ketika Huang R meng-commit file dari board ESP8266 , yang diberi nama devkit v.0.9. Berikutnya, di bulan yang sama.
Tuan PM memporting pustaka client MQTT dari Contiki ke platform SOC ESP8266 dan di-c0mmit ke project NodeMCU yang membuatnya mendukung protokol IOT MQTT melalui Lua.
Pemutakhiran penting berikutnya terjadi pada 30 Januari 2015 ketika Devsaurus memporting u8glib ke project NodeMCU yang memungkinkan NodeMCU bisa mendrive display LCD, OLED, hingga VGA. Demikianlah, project NodeMCU terus berkebang hingga kini berkat komunitas open source dibaliknya, pada musim panas 2016 NodeMCU sudah terdiri memiliki 40 modul fungsionalitas yang bisa digunakan sesuai kebutuhan developer. Karena jantung dari NodeMCU adalah ESP8266 (khususnya seri ESP-12, termasuk ESP-12E) maka fitur – fitur yang dimiliki NodeMCU akan kurang lebih sama ESP-12 (juga ESP-12E untuk NodeMCU v.2 dan v.3) kecuali NodeMCU telah dibungkus oleh API sendiri yang dibangun berdasarkan bahasa pemrograman eLua, yang kurang lebih cukup mirip dengan javascript. Beberapa fitur tersebut antara lain 1. 10 Port GPIO dari D0 – D10 2. Fungsionalitas PWM 3. Antarmuka I2C dan SPI 4. Antarmuka 1 Wire 5.
ADC Modul ini membutuhkan daya sekitar 3.3v dengan memiliki tiga mode wifi yaitu Station, Access Point dan Both (Keduanya). Modul ini juga dilengkapi
dengan prosesor, memori dan GPIO dimana jumlah pin bergantung dengan jenis ESP8266 yang kita gunakan. Sehingga modul ini bisa berdiri sendiri tanpa menggunakan mikrokontroler apapun karena sudah memiliki perlengkapan layaknya mikrokontroler.
Spesifikasi yang dimliki oleh NodeMCU sebagai berikut :
1. Board ini berbasis ESP8266 serial WiFi SoC (Single on Chip) dengan onboard USB to TTL. Wireless yang digunakan adalah IEE 802.11b/g/n.
2. 2 tantalum capasitor 100 micro farad dan 10 micro farad.
3. 3.3v LDO regulator.
4. Blue led sebagai indikator.
5. Cp2102 usb to UART bridge.
6. Tombol reset, port usb, dan tombol flash.
7. Terdapat 9 GPIO yang di dalamnya ada 3 pin PWM, 1 x ADC Channel, dan pin RX TX
8. 3 pin ground. 9. S3 dan S2 sebagai pin GPIO
10. S1 MOSI (Master Output Slave Input) yaitu jalur data dari master dan masuk ke dalam slave, sc cmd/sc.
11. S0 MISO (Master Input Slave Input) yaitu jalur data keluar dari slave dan masuk ke dalam master.
12. SK yang merupakan SCLK dari master ke slave yang berfungsi sebagai clock.
13. Pin Vin sebagai masukan tegangan.
14. Built in 32-bit MCU.
Gambar 2.7 Pengembangan Esp V3
NodeMCU pada dasarnya adalah pengembangan dari ESP 8266 dengan firmware berbasis e-Lua. Pada NodeMcu dilengkapi dengan micro usb port yang berfungsi untuk pemorgaman maupun power supply. Selain itu juga pada NodeMCU di lengkapi dengan tombol push button yaitu tombol reset dan flash.
NodeMCU menggunakan bahasa pemorgamanan Lua yang merupakan package dari esp8266. Bahasa Lua memiliki logika dan susunan pemorgaman yang sama dengan c hanya berbeda syntax. Jika menggunakan bahasa Lua maka dapat menggunakan tool Lua loader maupun Lua uploder. Selain dengan bahasa Lua NodeMCU juga support dengan sofware Arduino IDE dengan melakukan sedikit perubahan board manager pada Arduino IDE. Sebelum digunakan Board ini harus di Flash terlebih dahulu agar support terhadap tool yang akan digunakan. Jika menggunakan Arduino IDE menggunakan firmware yang cocok yaitu firmware keluaran dari AiThinker yang support AT Command. Untuk penggunaan tool loader Firmware yang di gunakan adalah firmware NodeMCU.
2.9 Bylink
Bylink adalah platform untuk aplikasi OS Mobile (iOS dan Android) yang bertujuan untuk kendali module Arduino, Raspberry Pi, ESP8266, WEMOS D1, dan module sejenisnya melalui Internet. Blynk dapat diunduh di Google play untuk pengguna android dan Apps Store untuk pengguna ios. Blynk juga mendukung berbagai macam hardware yang dapat digunakan untuk project Internet of Things.
Penambahan komponen pada Blynk Apps dengan cara Drag and Drop sehingga memudahkan dalam penambahan komponen Input/output tanpa perlu kemampuan pemrograman Android maupun iOS. (Ilham, 2018) Blynk diciptakan dengan tujuan untuk control dan monitoring hardware secara jarak jauh menggunakan komunikasi data internet. Kemampuan untuk menyimpan data dan menampilkan data secara visual baik menggunakan angka, warna ataupun grafis.
Terdapat 3 komponen utama Blynk, yaitu :
1. Blynk Apps Blynk Apps memungkinkan untuk membuat project interface dengan berbagai macam komponen input/output yang mendukung untuk pengiriman maupun penerimaan data serta merepresentasikan data sesuai dengan komponen yang dipilih. Representasi data dapat berbentuk visual angka maupun grafik. Terdapat 4 jenis kategori komponen yang berdapat pada Aplikasi Blynk
a. Controller digunakan untuk mengirimkan data atau perintah ke Hardware.
b. Display digunakan untuk menampilkan data yang berasal dari hardware ke smartphone.
c. Notification digunakan untuk mengirim pesan dan notifikasi.
d. Interface Pengaturan tampilan pada aplikasi Blynk dpat berupa menu ataupun tab.
e. Others beberapa komponen yang tidak masuk dalam 3 kategori sebelumnya diantaranya Bridge, RTC, Bluetooth.
2. Blynk Server Blynk server merupakan fasilitas Backend Service berbasis cloud yang bertanggung jawab untuk mengatur komunikasi antara aplikasi blynk di smartphone dengan lingkungan hardware. Kemampun untuk menangani puluhan hardware pada saat yang bersamaan semakin memudahkan bagi para pengembang sistem IoT. Blynk server juga tersedia dalam bentuk local server apabila digunakan pada lingkungan tanpa internet. Blynk server local bersifat open source dan dapat diimplementasikan pada Hardware Raspbery Pi.
3. Blynk Library Blynk Library dapat digunakan untuk membantu pengembangan code. Blynk library tersedia pada banyak platform perangkat keras sehingga semakin memudahkan para pengembang IoT dengan fleksibilitas hardware yang didukung oleh lingkungan Blynk.
Perancangan yang dilakukan dalam penelitian ini meliputi perancangan perangkat keras dan perencangana perangkat lunak. Perancangan perangkat keras dimulai dengan merancang diagram blok dan prinsip kerja sistem, kemudian dilanjutkan merancang rangkaian system dengan menggabungkan keseluruhan perangkat menjadi sebuah system terkendali.
3.1 Metodologi Perancangan 3.1.1 Tahap Persiapan
Pada sub bab ini penulis memaparkan persiapan analisis permasalahan yang diangkat dan dirancang menjadi sebuah alat yang disajikan diawal dengan diagram blok dan flowchart serta dipaparkan juga perancangan sistem yang akan dibangun,baik yang berupa perangkat keras ataupun perangkat lunak, dan cara melakukan pengujian.
3. 1.2 Tahap Pembuatan Sistem
Pada tahap Pembuatan sistem penulis memaparkan bagaimana perancangan pembuatan sistem,baik mulai dari peracangan rangkaian,hingga menyelesaikan perancangan alat secara keseluruhan. Sehingga dapat melalukan pengujian nantinya.
3. 1.3 Tahap pengukuran, Analisis dan Kesimpulan
Analisis masalah adalah mengidentifikasi sebuah masalah, guna untuk memperoleh informasi agar dapat dipecahkan atau deselesaikan. Data-data yang telah diperoleh dari pengujian sensor kemudian dilakukan analisa baik dari sensor kelembaban tanah dan sensor suhu Dilakukan analisa pada output-nya juga yaitu dari pompa hidup dan mati. Data analisa yang diperoleh adalah data saat alat digunakan pada pengujian yang telah dibuat, dan melakukan perbandingan dengan alat standar.
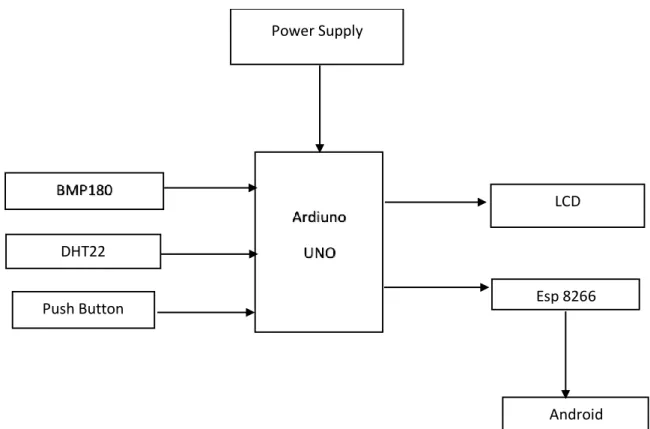
3.2 Diagram Blok
Diagram blok merupakan salah satu bagian terpenting dalam perancangan peralatan elektronika,Untuk mempermudah perancangan system diperlukan sebuah diagram blok sistem yang mana tiap blok mempunyai fungsi dan cara kerja tertentu.
Adapun diagram blok dari sistem yang dirancang adalah sebagai berikut :
Power Supply
DHT22
LCD
Android
Push Button Esp 8266
Gambar 3.1 diagram blok alat
Berdasarkan diagram blok diatas terdapat beberpa komponen dan cara kerjanya sebagai berikut:
1. Power Supply berfungsi sebaga pemberi tegangan serta arus listrik agar perangkat atau komponen-komponen lainnya dapat berfungsi sebagaimana mestinya.
2. BMP180 adalah sensor yang dapat mengukur tekanan atmosfer dan suhu menggunakan Arduino.
3. Arduino Uno merupakan mikrokontroler yang berfungsi sebagai pengontrol atau pengendali rangkaian elektronika dan pada umumnya dapat menyimpan program.
4. DHT-22 atau AM2302 adalah sensor suhu dan kelembaban, sensor ini memiliki keluaran berupa sinyal digital dengan konversi dan perhitungan dilakukan oleh MCU 8-bit terpadu.
5. Push Button digunakan untuk mengontrol kondisi ON atau OFF dari suatu rangkaian listrik khususnya pengontrolan.
6. LCD berfungsi sebagai untuk menampilkan data berupa teks dan angka yang kemudian diproses oleh rangkaian.
7. Esp 8266 berfungsi sebagai perangkat tambahan mikrokontroler seperti arduino agar dapat terhubung langsung dengan wifi dan membuat koneksi TCP/IP.
8. Android berfungsi sebagai penampil Massa Jenis Udara.
3.3 Perangcangan Antar muka Setiap Blok Diagram
3.3.1 Perancangan Antar Muka Arduino Nano dengan Power Supply Power Supply atau dalam bahasa Indonesia disebut dengan Catu Daya adalah suatu alat listrik yang dapat menyediakan energi listrik untuk perangkat listrik ataupun elektronika lainnya. Pada dasarnya Power Supply atau Catu daya ini memerlukan sumber energi listrik yang kemudian mengubahnya menjadi energi listrik yang dibutuhkan oleh perangkat elektronika lainnya.
Gambar 3.2 Rangkaian Power Supply dengan Arduino Nano
3.3.2 Rangkaian LCD (Liquid Crystal Display)
Perancangan alat ini digunakan untuk menampilkan data berupa teks dan angka yang kemudian diproses oleh rangkaian yang dilakukan dengan sebuah program yang ada pada arduino nano.
Gambar 3.3 Skematik rangkaian LCD
3.3.3 Perancangan dan pembuatan DHT22
Pada alat ini menggunakan sensor DHT22 yang digunakan untuk mengetahui
suhu dan kelembaban lingkungan sekitar. Sensor ini memiliki pin yang digunakan untuk mengetahui data suhu dan kelembaban. Pin tersebut nantinya akan terhubung
ke mikrokontroler untuk diolah data yang sudah didapat.
3.3.4 Perancangan dan pembuatan BMP180
Sensor Tekanan udara BMP180 digunakan untuk mengukur tekanan udara di lingkungan sekitar. Sensor ini menggunakan sistem wiring Serial Data (SDA) dan Serial Clock (SCL) untuk mendapatkan hasil informasi tekanan udara yang akan diolah oleh mikrokontroler
Gambar 3.5 Skematik rangkaian BMP180
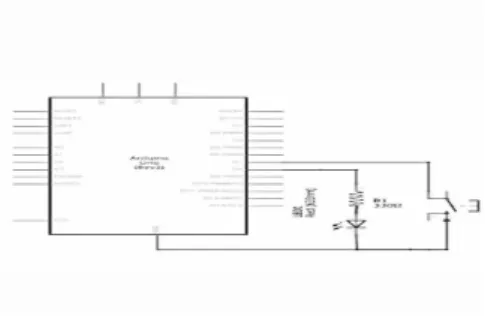
3.3.5 Perancangan dan Pembuatan Push Button
Push button switch (saklar tombol tekan) adalah perangkat/saklar sederhana yang berfungsi untuk menghubungkan atau memutuskan aliran arus listrik dengan sistem kerja tekan unlock (tidak mengunci). Push button berfungsi untuk mengirim sinyal ke mikrokontroler.
Gambar 3.6 Skematik rangakain Push Button
3.3.6 Perancangan dan Pembuatan Esp 8266
perancangan alat ini merupakan bagian utama sebagai sistem kendali keseluruhan input dan output yang terhubung ke Mikrokontroler. Dalam satu Chip ini sudah terdapat modul komunikasi Wifi yang dapat diatur sebagai Client atau Server. ESP8266 memiliki kemampuan on-board prosesing dan storage yang memungkinkan chip tersebut untuk diintegrasikan dengan sensor-sensor atau dengan aplikasi alat tertentu melalui pin input output hanya dengan pemrograman singkat. Board ini mempunyai 11 pin digital input/output, sebuah pin input analog (maximum input 3.2 Volt), sebuah koneksi micro USB, sebuah power jack dengan input 9-24 Volt.
Gambar 3.7 Skematik Rangkaian Esp 8266
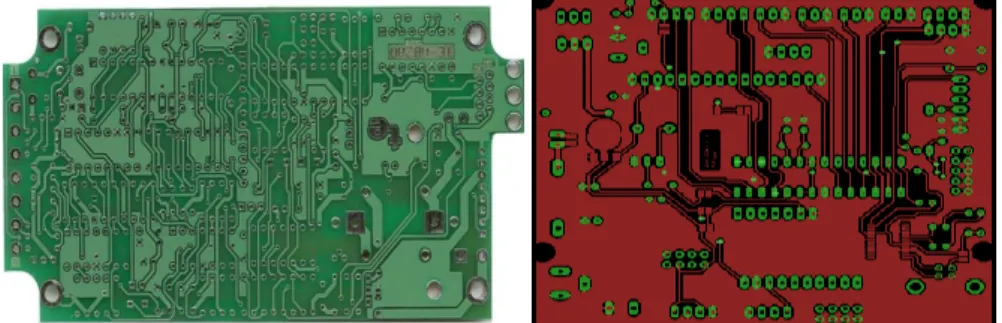
3.4 Perancangan dan Pembuatan PCB 3.4.1 Alat dan bahan pembuatan PCB
1. Papan Pcb
Printed Circuit Board (PCB) adalah sebuah papan rangkaian yang terbuat dari bahan ebonit( Pertinax) atau fiber glass dimana salah satu sisi permukaannya dilapisi dengan tembaga tipis.Jenis ini umumnya disebut single side karana hanya memiliki satu permukaan yang berlapiskan tembaga. Sedangkan PCB yang kedua sisinya digunakan untuk pembuatan rangkaian yang bersifat kompleks dan rumit, sehingga kedua bagian sisinya dapat difungsikan sebagai jalur – jalur pengawatan, PCB ini juga berfungsi sebagai dudukan komponen – komponen.
2. Kertas Milimeter Block
Kertas milimeter block adalah kertas bergaris yang memiliki block kotak bergaris yang telah terukur. Dimana kertas milimeter block dalam pembuatan papan PCB digunakan untuk menggambar gambar rangkaian, gambar tata letak komponen, dan gambar jalur PCB
3. Setrika
Setrika ini berfungsi untuk menggosok gambar rangkaian yang sudah di print ke permukaan papan PCB polos agar dapat digunakan untuk membuat projek tersebut.
4. Pelarut Pcb
Bahan Pelarut untuk menghilangkan lapisan tembaga pada papan PCB yang tidak tergambar pola jalur (tidak tertutup tinta) adalah dengan melakukan etching (pelarutan). Ada beberapa bahan kimia yang dapat dipergunakan untuk etching diantaranya adalah larutan :
a.Feri Clorida (FeCl3) b.Natrium Sulfat (Na2SO4) c.Asam Nitrat (HNO3)
d.Asam Clorida + Perhidrosida (HCl + H2O2)
5. Amplas
Amplas (kadang juga disebut kertas pasir) adalah sejenis kertas yang digunakan untuk membuat permukaan benda - benda menjadi lebih halus dengan cara menggosokkan salah satu permukaan amplas yang telah ditambahkan bahan yang kasar kepada permukaan benda tersebut.
6. Pisau Cutter
Cutter memiliki beragam bentuk dan ukuran, ada yang besar, sedang, dan kecil. Ada yang berbentuk bulat, panjang atau seperti gantungan kunci. Tapi meskipun memiliki berbagai bentuk dan ukuran yang berbeda - beda, fungsi cutter cuma satu, yaitu untuk memotong.
7. Bor Pcb
Bor PCB adalah merupakan bor listrik tangan mini yang digunakan untuk membuat lubang pada PCB, lubang - lubang yang terdapat di bantalan PCB yang berfungsi untuk menaruh kaki komponen elektronika.
Langkah-langkah yang harus dilakukan dalam pembuatan PCB :
a. Pertama-tama mendesain layout PCB menggunakan software Ares Proteus.
b. Mencetak gambar layout dengan kertas glossy tinta serbuk.
c. Selanjutnya mengunting kertas layout PCB yang sudah diprint sesuai dengan ukuran.
d. Mempersiapkan papan PCB dan mengukur PCB sesuai kebutuhan.
e. Memotong PCB sesuai dengan ukuran menggunakan alat pemotong atau cuter.
f. Membersihkan lapisan tembaga PCB dengan stel wool atau amplas sampai bersih. Hingga tidak ada bekas sidik jari atau karat yang menempel pada PCB tersebut.
g. Menyablon PCB
1. Memasang kertas glossy pada PCB dengan permukaan yang terdapat cetakan gambar menghadap ke sisi PCB polos yang terdapat lapisan tembaganya.
2. Menyiapkan setrika sampai dengan tingkat panas yang sedang.
Setrika tidak boleh terlalu panas, karena bisa membuat tembaga pada PCB memuai dan mengelembung. Juga tidak boleh terlalu dingin, karena selain akan membuat proses penyablonan lebih lama juga membuat tinta jalur PCB tidak menempel dengan sempurna.
3. Menyetrika kertas glossy dengan penekanan yang sedang dan merata pada setiap bagian PCB
4. Setelah kertas glossy merekat pada PCB, PCB direndam dalam air sampai kertas glossy terangkat dengan sendirinya, atau dengan mengosok kertas dengan perlahan menggunakan tangan mulai dari bagian tengah PCB. Hal ini dilakukan agar tidak merusak tinta yang sudah merekat pada PCB.
5. Setelah selesai proses penyablonan, memastikan tidak ada gambar jalur PCB yangterpotong atau mengelupas. Jika ada gambar jalur yang hilang, dapat ditambal atau disambung menggunakan spidol permanen.
h. Menaburkan FeCl3 ke dalam nampan non logam dan melarutkannya menggunakan air panas. Semakin banyak FeCl3 akan mempercepat pelarutan. Air yang panas juga akan mempercepat proses pelarutan.
i. Setelah FeCl3 larut dalam air, memasukan PCB yang terdapat gambar layout ke dalamnya. Untuk mempercepat proses pelarutan, dapat dilakukan dengan menggoyang-goyangkan nampan secara perlahan.
Hal ini dilakukan secara terus menerus sampai semua tembaga yang tidak tertutup tinta dipermukaan PCB larut.
j. Setelah tembaga yang tidak tertutup tinta telah larut, PCB diangkat dan dibersihkan dengan air mengalir.
k. Mengeringkan PCB dan menggosoknya menggunakan steel wool sampai tintayang melekat pada jalur PCB bersih. Hal ini dilakukan agar mempermudah penyolderan komponen.
l. Tahap selanjutnya yaitu drilling atau membuat lubang pada PCB. Mata bor yang digunakan memiliki diameter kecil, antara 0,8 dan 1 milimeter untuk komponen dan 3 milimeter untuk mur-baut.
m. Setelah menggebor PCB, selanjutnya melapisi PCB menggunakan gondorukem pada permukaan tembagaPCB agar tidak mudah teroksidasi, juga untuk mempermudah proses penyolderan.
Gondorukem akan membuat timah lebih mudah menempel pada tembaga saat disolder.
n. Memasang komponen sesuai dengan sekema rangkaian, jangan sampai keliru dalam memasang komponen terutama jika ada polaritas atau kutubnya.
o. Setelah komponen terpasang dengan benar, dapat merekatkan bagian kaki-kaki komponen dengan cara disolder. Dalam penyolderan harap berhati-hati dan jangan menghirup asap dari timah solder, karena berbahaya bagi kesehatan. Sebaiknya dalam melakukan penyolderan gunakan masker penutup hidung. Selain itu juga jangan terlalu lama menyolder komponen, karena beberapa komponen tidak tahan terhadap panas seperti IC, transistor, LED, bahakan kapasitor bisa kemungkinan akan mati.
p. PCB selesai dibuat, kemudian melakukan pengecekan apakah layout yang telah dibuat dapat bekerja dengan baik atau belum.
Pada saat rangkaian dihubungkan dengan umber tegangan, maka jalur – jalur pengawatan pada PCB ini akan berfungsi sebagai penghantar arus listrik. Jalur – jalur pengawatan tersebut akan menghubungkan satu komponen dengan komponen yang lain secara terpadu, sehingga berbentuk suatu rangkaian elektronik. Menggunakan PCB didalam perakitan – perkitan peralatan elektronik, diperoleh keuntungan antara lain :
1. Mudah mencari kerusakan, jika alat tersebut mengalami gangguan.
2. Dapat dibuat peralatan elektronik yang semakin kecil, karana tempat dudukan komponen dapat dipersempit.
3. Sedikit menggnakan kabel.
4. Pada peralatan yang bekerja dengan frekwensi tinggi dapat dicegah terjadinya frekuensi liar
Gambar 3.8 Gambar PCB
3.5 Flowchart
Flowchart adalah suatu bagan dengan simbol-simbol yang menggambarkan urutan proses secara mendetail dan hubungan antara suatu proses (intruksi) dengan proses lainnya dalam suatu program. Dalam pembuatan sistem yang dilakukan, maka akan menghasilkan flowchart sebagai berikut :
Gambar 3.9 flowchart 3.6 Pengujian komponen
3.6.1 Pengujian Arduino Uno
Pada pengujian ini dikarena penulis menggunakan arduino makadalam pengujiannya kita perlu mensetting jenis board dan port serial yang sedang
kita gunakan melalui menu Tools > Board dan Tools > Serial Port. Pemilihan board berguna untuk mengeset parameter (contohnya: kecepatan mikrokontroler dan baud rate) yang digunakan ketika mengcompile dan meng-upload sketch, seperti contoh berikut ini :
Gambar 3.10 Pengecekan Board
Gambar 3.11 Pengecekkan Serial Port
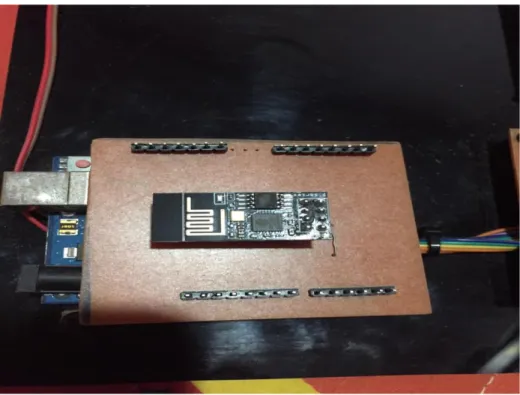
3.6.2 Pengujian ESP8266 void setup() {
pinMode(led, OUTPUT);
}
void loop() {
digitalWrite(led, HIGH);
delay(500);
digitalWrite(led, LOW);
delay(500);
}
Gambar 3.12 Hasil ESP8266