BAB 2
TINJAUAN PUSTAKA
2.1 Sensor Ultrasonik
Dari semua gelombang mekanik yang ada di alam, yang terpenting dalam kehidupan sehari-hari adalah gelombang longitudional. Gelombang longitudional dalam sebuah medium, biasanya udara, dinamakan gelombang bunyi. Alasannya adalah bahwa telinga manusia sangat peka dan dapat mendeteksi gelombang bunyi walau intensitasnya sangat rendah.
Defenisi paling umum dari bunyi adalah bahwa bunyi adalah sebuah gelombang longitudional dalam suatu medium. Gelombang bunyi yang paling sederhana adalah gelombang sunisoidal yang mempunyai frekuensi, amplitude, dan panjang gelombang tertentu. Telinga manusia peka terhadap gelombang dalam jangkauan frekuensi sekitar 20 sampai 20000 Hz, yang dinamakan jangkauan yang dapat didengar atau audible range, tetapi kita juga menggunakan istilah bunyi untuk gelombang serupa dengan frekuensi diatas (ultasonik) dan di bawah (infrasonic) jangkauan pendengaran manusia. (Young, 2001)
Gelombang dengan getaran frekuensi di atas jangkauan pendengaran telinga normal disebut sebagai ultrasonik dengan frekuensi lebih dari 20000 Hz. Gelombang ultrasonik dengan amplitudo yang tinggi kadang-kadang disebut sebagai sonic, dengan frekuensi sekitar 500 x 106 hingga 1 x 106 Hz. Banyak
fenomena terutama yang terjadi di rentang frekuensi yang lebih tinggi yang diamati yang tidak dapat dijelaskan dan memenuhi teori klasik dan fakta ultrasonik. Sifat unik ultrasonik telah diterapkan untuk industri, signaling, obat-obatan dan berbagai bidang lainnya. (Carlin, 1960)
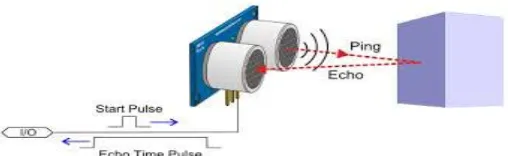
Struktur atom dari kristal piezoelectric akan berkontraksi mengembang atau menyusut terhadap polaritas tegangan yang diberikan dan ini disebut dengan efek piezoelectric. Kontraksi yang terjadi diteruskan ke diafragma penggetar sehingga terjadi gelombang ultrasonik yang dipancarkan ke udara.
Pantulan gelombang ultrasonik akan terjadi bila ada objek tertentu dan pantulan gelombang ultrasonik akan diterima kembali oleh unit sensor penerima. Selanjutnya unit sensor penerima akan menyebabkan diafragma penggetar akan bergetar dan efek piezoelectric menghasilkan sebuah tegangan bolak-balik dengan frekuensi yang sama.
Gambar 2.1 Prinsip kerja sensor ultrasonik
Besar amplitudo sinyal elekrik yang dihasilkan unit sensor penerima tergantung dari jauh dekatnya objek yang dideteksi serta kualitas dari sensor pemancar dan sensor penerima. Proses sensoring dilakukan menggunakan metode pantulan untuk menghitung jarak antara sensor dengan obyek sasaran. Jarak antara sensor tersebut dihitung dengan cara mengalikan setengah waktu yang digunakan oleh sinyal ultrasonik dalam perjalanannya dari rangkaian pengirim sampai diterima oleh rangkaian penerima, dengan kecepatan rambat dari sinyal ultrasonik tersebut pada media rambat yang digunakannya, yaitu udara. (Budiharjo,2007)
2.1.1 Sensor Jarak Ultrasonik SR-04
Gambar 2.2 Sensor jarak ultrassonik SR-04
Sensor SR-04 mendeteksi jarak objek dengan cara memancarkan gelombang ultrasonik kemudian mendeteksi pantulannya. Sensor SR-04 memancarkan gelombang ultrasonik sesuai dengan kontrol dari mikrokontroller pengendali.
Spesifikasi sensor ultrasonik SR-04 : 1 Kisaran pengukuran 2 cm – 4 m 2. Dimensi 45mm x 20mm x 15mm 3. Sudut pancaran 15°.(Budiharjo,2007)
2.1.2 Instalasi Sensor Ultrasonic SR-04
Sensor ultrasonic SR-04 akan bekerja jika mendapat suplay tegangan sebesar 5 V DC. Dimana tegangan 5 V DC dihubungkan dengan konektor Vcc dan ground pada sensor. Untuk konektor SIG dapat dihubungkan dengan mikrokontroler. Konektor SIG adalah sebagai control sensor dalam pendeteksian objek sekaligus pembacaan jarak objek dengan sensor. (Budiharjo,2007)
2.2 FOTODIODA
Fotodioda adalah suatu jenis dioda yang resistansinya berubah-ubah bila cahaya yang jatuh pada dioda berubahubah intensitasnya. Dalam gelap nilai tahanannya sangat besar hingga praktis tidak ada arus yang mengalir. Semakin kuat cahaya yang jatuh pada dioda maka makin kecil nilai tahanannya, sehingga arus yang mengalir semakin besar.
Dioda foto adalah jenis dengan diode biasa, komponen arus listrik. Cahaya yang dapat dideteksi oleh diode foto ini mulai dari cahaya 2001)
2.2.1 Bahan Dari Fotodioda
Fotodioda terbuat dari bahan semikonduktor yaitu silicon (Si), atau Galium Arsenida, dan yang lain adalah Insb, InAs, PbSe. Material-material ini meyerap cahaya dengan karakteristik panjang gelombang mencangkup: 2500 Å – 11000 Å untuk silicon, 8000 Å – 20,000 Å untuk GaAs. (Held.G,2008)
Gambar 2.4 Fotodioda
2.2.2 Prinsip Kerja Fotodioda
semikonduktor yang kehilangan elektron. Arah Arus yang melalui sebuah semikonduktor adalah kebalikan dengan gerak muatan pembawa. Cara tersebut didalam sebuah photodiode digunakan untuk mengumpulkan photon menyebabkan pembawa muatan terbentuk di bagian-bagian elektroda.
Saat photodiode terkena cahaya, maka akan bersifat sebagai sumber tegangan dan nilai resistansinya akan menjadi kecil. Saat fotodiode tidak terkena cahaya, maka nilai resistansinya akan besar atau dapat diasumsikan tak hingga. (Knoll. F. G, 2010)
2.2.3 Karakteristik Fotodioda Dan Aplikasinya Mengukur Intensitas Cahaya
Fotodioda berbeda dengan dioda biasa. Jika fotodioda persambungan p-n bertegangan balik disinari, maka arus akan berubah secara linier dengan kenaikan fluks cahaya yang dikenakan pada persambungan tersebut. Berdasarkan hal tersebut dapat dibuat alat untuk mendeteksi intensitas cahaya dengan memanfaatkan karakteristik fotodioda sebagai salah satu alternatif pendeteksi intensitas cahaya.
Fotodioda dapat berfungsi sebagai sensor untuk mengukur intensitas cahaya, dimana semakin besar intensitas cahaya (ditunjukkan cahaya api) yang mengenainya maka arus yang dihasilkan fotodioda juga akan semakin besar. (James F. Cox, 2001)
2.3 Mikrokontroller ATmega 8535
Mikrokontroler dapat dianalogikan dengan sebuah system computer yang dikemas dalam sebuah chip. Artinya bahwa di daam sebuah IC mikrokontroler sebenarnya sudah terdapat kebutuhan minimal agar mikroprosesor dapat bekerja, yaitu meliputi mikroprosesor, ROM, RAM, I/O dan clock seperti halnya yang dimiliki oleh sebuah computer PC. ATmega8535 memiliki fitur yang cukup lengkap, mulai dari kapasitas memori program dan memori data yang cukup besar, interupsi, timer/counter, PWM, USART, TWI, analog comparator, EEPROM internal dan juga ADC internal semuanya ada di dalam ATmega8535. (Bejo, 2008)
Mikrokontroler jenis MCS memiliki kecepatan frekuensi kerja 1/12 kali frekuensi osilator yang digunakan sedangkan pada kecepatan frekuensi kerja AVR sama dengan kecepatan frekuensi kerja osiator yang digunakan. Jadi apabia menggunakan frekuensi osilator yang sama, maka AVR memiliki kecepatan kerja 12 kali lebih cepat dibandingkan dengan MCS. (Setiawan, 2011)
Kemampuan eksekusi yang lebih tinggi menjadi alasan bagi banyak orang untuk beralih dan lebih memilih menggunakan mikrokontroler jenis AVR ketimbang mikrokontroler pendahulunya yaitu keluarga MCS-51. Mikrokontroller ATmega8535 adalah mikrokontroller 8 bit buatan ATMEL dengan 8 KByte System Programable Flash dengan teknologi memori tak sumirna (nonvolatile), kepadatan tinggi, dan kompatibel dengan pin out dan set instruksi standar industri MCS51 INTEL. (Bejo, 2008)
2.3.1Fitur ATMEGA8535
Berikut ini adalah fitur-fitur yang dimiliki oleh ATMega 8535.
1. 130 macam intruksi yang hampir semuanya dieksekusi dalam satu siklus clock 2. 32 x 8-bit register serbaguna
3. Kecepatan mencapai 16 MIPS dengan clock 16 MHz
4. 8 Kbyte Flash Memori, yang memiliki fasilitas In System Programming
5. 512 Byte internal EEPROM
7. Programming Lock, fasilitas untuk mengamankan kode program 8. 2 buah timer/counter 8-bit dan 1 buah timer/counter 16-bit
9. 4 channel output PWM
10.8 channel ADC 10-bit
11.Serial USART
12.Master/Slave SPI serial interface 13.Serial TWI atau 12C
14.On-Chip Analog Comparator
Gambar 2.5 Konfigurasi pin ATmega8535
2.3.2Deskripsi Pin-Pin Pada Mikrokontroler ATMega8535
2.3.2.1 Port B
Merupakan Port I/O 8-bit dua arah dengan resistor pull-up internal. Selain sebagai Port I/O 8-bit Port B juga dapat difungsikan sebagai berikut :
1. PB7 : SCK = SPI bus serial clock
4. PB4 : SS = SPI slave select input
5. PB3 : AIN1 = analog comparator negative input 6. PB2 : AIN0 = analog comparator positive input 7. PB1 : T1 = timer/counter 0 external counter input 8. PB0 : T0 = timer/counter 0 external counter input
2.3.2.2 RESET (Reset input)
RESET (RST) pada pin 9 merupakan pin reset yang akan bekerja bila diberi pulsa rendah selama minimal 1.5 us.
2.3.2.3 VCC
VCC merupakan pin yang berfungsi sebagai catu daya digital.
2.3.2.4 GND
Ground untuk catu daya digital.
2.3.2.5 XTAL2
Merupakan output dari penguat osilator pembalik.
2.3.2.6 XTAL1
2.3.2.7 Port D
Merupakan Port I/O 8-bit dua arah dengan resistor pull-up internal. Selain sebagai Port I/O 8-bit Port D juga dapat difungsikan secara individu sebagai berikut :
1. PD7 : OC2 (Timer/Counter2 output compare match output)
2. PD6 : ICP (Timer/Counter1 input capture pin)
3. PD5 : OC1A (Timer/Counter1 output compareA match output)
4. PD4 : OC1B (Timer/Counter1 output compare B match output)
5. PD3 : INT1 ( external interrupt 1 input ) 6. PD2 : INT0 ( external interrupt 0 input )
7. PD1 : TDX (UART output line)
8. PD0 : RDX (UART input line)
2.3.2.8Port C
Merupakan Port I/O 8-bit dua arah dengan resistor pull-up internal. Selain sebagai Port I/O 8-bit 4 bit Port C juga dapat difungsikan secara individual sebagai berikut:
1. PC7 : TOSC2 (timer oscillator 2) 2. PC6 : TOSC1 (timer oscillator 1) 3. PC1: SDA ( serial data input/output) 4. PC0 : SCL (serial clock)
2.3.2.9AVCC
2.3.2.10 GND
Ground untuk catu daya analog.
2.3.2.11 AREF
AREF adalah tegangan referensi analog untuk ADC.
2.3.2.12 Port A
Merupakan Port I/O 8-bit dua arah dengan resistansi pull-up internal. Selain sebagai Port I/O 8-bit juga dapat difungsikan sebagai masukan 8 channel ADC. (Bejo, 2008)
2.3.4 Arsitektur ATmega8535
Mikrokontroler ATmega8535 memiliki arsitektur Harvard, yaitu memisahkan memori untuk kode pemrogram dan memori untuk data sehingga dapat memaksimalkan unjuk kerja dan paralelisme. Intruksi-intruksi dalam memori program dieksekusi dalam satu alur tunggal, dimana pada saat satu intruksi dikerjakan intruksi berikutnya diambil (pre-fetched) dari memori program. Konsep ilmiah yang memungkinkan instruksi-instruksi dapat dieksekusi dalam setiap satu sikus clock.
R27), register Y (gabungan R28 dan R29), dan register Z (gabungan R30 dan R31).
Hampir semua intruksi AVR memiliki format 16-bit (word). Setiap alamat memori program terdiri dari instruksi 16-bit atau 32-bit. Selain register serbaguna di atas, terdapat register lain yang terpetakan dengan teknik memory mapped I/O sebesar 64 Byte. ATmega8535 mempunyai 32 general purpose register (R0..R31) yang terhubung langsung dengan Arithmetic Logic Unit (ALU), sehingga register dapat diakses dan dieksekusi hanya dalam waktu satu siklus clock. (Bejo, 2008)
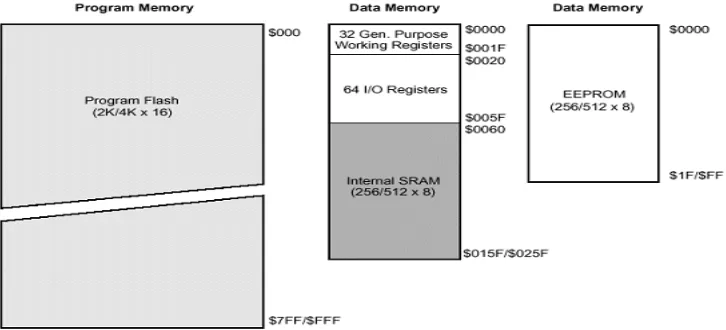
2.3.5 Organisasi Memori ATMega8535
Mikrokontroler ATmega 8535 memiliki 3 jenis memori yaitu memori program, memori data dan memori EEPROM.
Gambar 2.6 Organisasi memori ATMega8535
2.3.5.1 Memori Program
semua kapasitas memori program di atas dapat digunakan untuk program aplikasi. Tetapi jika kita menggunakan fitur Boot Loader Flash maka pembagian ukuran kedua bagian ini ditentukan oleh BOOTSZ fuse. (Bejo, 2008)
2.3.5.2 Memori Data
Memori data pada ATMega 8535 terdiri atas memori data internal dan eksternal kapasitas dari mSRam internal adalah sebesar 512 Kbytes. Ini menempati ruang alamat setelah 32 lokasi register serbaguna. alamat dan setelah 64 register I/O. Jika SRAM eksternal digunakan, ini akan mengiukuti besar SRAM eksternal sampai dengan maksimum 64K terganung ukuran SRAM eksternal.
Operasi SRAM eksternal dimungkinkan oleh setting bit SRE di register MCUCR. Mode pengalamatan untuk mengakses memori data meliputi pengalamatan langsung (Direct Addressing), pengalamatan tak langsung (Indirect Addressing), Indirect dengan Pre-Decrement, Indirect dengan Post-Decrement, dan Indirect dengan Displacement. (www.ATMEL.com.Data sheet ATMega 8535)
2.3.5.3 Memori EEPROM
ATmega 8535 memiiki memori EEPROM SEBESAR 512 Byte yang terpisah dari memori program maupun memori data. Memori EEPROM ini hanya dapat diakses dengan menggunakan register-register I/O yaitu register EEPROM Addres (EEARH-EEARL), register EEPROM Data (EEDR) dan register EEPROM Contro (EECR). Untuk mengakses memori EEPROM ini diperlakukan seperti mengakses data eksternal sehingga waktu eksekusinya relative lebih lama bila dibandingkan dengan data dari SRAM. (Bejo, 2008)
2.3.6 Status Register (SREG)
Register SREG digunakan untuk menyimpan informasi dari hasil operasi aritmatika yang terakhir. Informasi-informasi dari register SREG dapat digunakan untuk mengubah alur program yang sedang dijalankan dengan menggunakan instruksi percabangan. Data SREG akan selalu berubah setiap instruksi atau operasi pada ALU dan datanya tidak otomatis tersimpan apabila terjadi instruksi percabangan baik karena interupsi maupun lompatan. (Bejo, 2008)
2.4 Bahasa Pemrograman ATMega8535
Dalam proses merancang sistem mikrokontroler diperlukan adanya software yang berupa software compiler dan software downloader/programmer.
2.4.1 CODEVISION AVR
mikrokontroler AVR sudah dikuasai, maka akan dengan mudah menguasai pemrograman keseluruhan mikrokontroler jenis mikrokontroler AVR. Namun bahasa assembler relatif lebih sulit dipelajari dari pada bahasa C.
CodeVision AVR merupakan salah satu software compiler yang khusus digunakan untuk mikrokontroler keluarga AVR. Meskipun CodeVisionAVR termasuk software komersil, namun kita dapat menggunakannya dengan mudah karena terdapat versi evaluasi.
Salah satu kelebihan CodeVisionAVR adalah tersedianya fasilitas untuk mendownload program ke mikrokontroler yang telah terintegrasi sehingga dengan demikian CodeVisionAVR ini selain dapat berfungsi sebagai software compiler juga dapat berfungsi sebagai software programmer/downloader. Jadi kita dapat melakukan proses download program yang telah dikompile dengan menggunakan software CodeVisionAVR. (Bejo, 2008)
2.5 LCD 16x2
LCD merupakan salah satu perangkat penampil yang sekarang ini banyak digunakan menggantikan fungsi dari penampil CRT (Cathode Ray Tube). LCD memanfaatkan silicon atau gallium dalam bentuk kristal cair sebagai pemendar cahaya. Pada layar LCD, setiap matrik adalah susunan dua dimensi pexel yang dibagi dalam bentuk baris dan kolom.
Gambar 2.8 Bentuk LCD (Liquid Cristal Display)
dengan mudah dibawah terang sinar matahari. LCD ini menampilkan data dengan 2 baris tampilan pada display.
Operasi dasar dari LCD terdiri dari empat, yaitu instruksi mengakses proses internal, instruksi menulis data, instruksi membaca kondisi sibuk dan instruksi membaca data. ROM pembangkit sebanyak 192 tipe karakter, tiap karakter dengan huruf 5x7 dot matrik. Kapasitas pembangkit RAM 8 tipe karakter (membaca program), maksimum pembacaan 80x8 bit tampilan data. Perintah utama LCD adalah Display Clear, Cursor Home, Display ON/OFF, Display Character Blink, Cursor Shift, dan Display Shift.
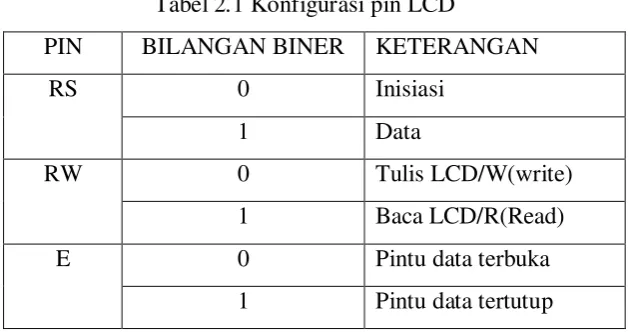
Tabel 2.1 Konfigurasi pin LCD
PIN BILANGAN BINER KETERANGAN
RS 0 Inisiasi
1 Data
RW 0 Tulis LCD/W(write)
1 Baca LCD/R(Read)
E 0 Pintu data terbuka
1 Pintu data tertutup
Lapisan film yang berisi Kristal cair diletakkan di antara dua lempeng kaca yang telah ditanami elektroda logam transparan. Saat tegangan dicatukan pada beberapa pasang elektroda, molekul-molekul kristal cair akan menyusun diri agar cahaya yang menganainya akan dipantulkan atau diserap. Dari hasil pantulan atau penyerapan cahaya tersebut akan terbentuk pola huruf, angka, atau gambar sesuai bagian yang diaktifkan. (Setiawan, 2011)
2.6 Bluetooth
mampu menyediakan layanan komunikasi data dan suara secara real-time antara host-host bluetooth dengan jarak jangkauan layanan yang terbatas. Bluetooth sendiri dapat berupa card yang bentuk dan fungsinya hampir sama dengan card yang digunakan untuk wireless local area network (WLAN) dimana menggunakan frekuensi radio standar IEEE 802.11, hanya saja pada bluetooth mempunyai jangkauan jarak layanan yang lebih pendek dan kemampuan transfer data yang lebih rendah.
Pada dasarnya bluetooth diciptakan bukan hanya menggantikan atau menghilangkan penggunaan kabel didalam melakukan pertukaran informasi, tetapi juga mampu menawarkan fitur yang baik untuk teknologi mobile wireless dengan biaya yang relatif rendah, konsumsi daya yang rendah, interoperability yang menjanjikan, mudah dalam pengoperasian dan mampu menyediakan layanan yang bermacam-macam.
Bluetooth menggunakan salah satu dari dua jenis frekuensi Spread Specturm Radio yang digunakan untuk kebutuhan wireless. Jenis frekuensi yang digunakan adalah Frequency Hopping Spread Spectrum (FHSS) dan Direct Sequence Spread Spectrum (DSSS) digunakan oleh IEEE802.11xxx. Transceiver yang digunakan oleh Bluetooth bekerja pada frekuensi 2,4 GHz unlicensed ISM (Industrial, Scientific, and Medical). (e-book dari http://wireless.klings.org)
2.7 Motor DC
Struktur robot sebagian besar dibangun berdasarkan konstruksi mekanik. Robot yang memiliki kemampuan navigasi dan manipulasi secara relative memiliki konstruksi mekanik yang lebih rumit dibandingkan dengan yang berkemampuan navigasi saja yang hanya memiliki roda penggerak.
tengah motor memiliki jumlah kutub yang ganjil dan pada setiap kutubnya terdapat lilitan. Lilitan ini terhubung ke area kontak yang disebut komutator.
Sikat (brushes) yang terhubung ke kutub positif dan negatif motor memberikan daya ke lilitan sedemikian rupa sehingga kutub yang satu akan ditolak oleh magnet permanen yang berada di dekatnya, sedangkan lilitan lain akan ditarik ke magnet permanen yang lain sehingga menyebabkan jangkar berputar. Ketika jangkar berputar, komutator mengubah lilitan yang mendapat pengaruh polaritas medan magnet sehingga jangkar akan terus berputar selama kutub positif dan negatif motor diberi daya.
Hal utama yang perlu diperhatikan dalam disain mekanik robot adalah perhitungan kebutuhan torsi untuk menggerakkan roda. Motor sebagai penggerak utama yang paling sering dipakai pada umumnya akan bekerja optimal pada putaran yang relative tinggi yang hal ini tidak sesuai bila porosnya dihubungkan langsung ke roda. Sebab kebanyakan gerakan yang digunakan pada sisi badan robot adalah relative pelan namun bertenaga. Untuk itu diperlukan cara-cara transmisi gaya motor secara tepat. Salah satu metode yang sering digunakan adalah menggunakan system gear.