SENTRA IV-11
Strategi Pengaturan Torsi pada
Hybrid Electric Vehicle
(HEV)
Menggunakan Metode
Neuro-Fuzzy
Prediktif
Aulia Rahma Annisa1, Mochammad Rameli2, Rusdhianto Effendi A.K.3
1,2,3 Institut Teknologi Sepuluh Nopember Surabaya
Kontak Person:
Aulia Rahma Annisa Gunung Anyar Tengah No.16
Surabaya, 60294
Telp: 08563456745, E-mail: [email protected]
Abstrak
Hybrid Electric Vehicle (HEV) adalah kendaraan yang memiliki dua sumber tenaga, yaitu motor bakar dan motor listrik. Motor bakar sebagai penggerak utama memiliki kapasitas yang lebih rendah dibandingkan kendaraan konvensional karena dibantu oleh kerja dari motor listrik. Motor listrik berperan membantu motor bakar mencapai torsi dan kecepatan sesuai dengan yang diinginkan. Pengaturan torsi pada HEV berperan dalam hal seberapa besar torsi yang dibutuhkan oleh motor listrik untuk membantu kinerja dari motor bakar. Pada saat motor bakar tidak mampu mempertahankan kecepatan, maka motor listrik akan membantu memberikan tenaga. Untuk mengatasi permasalahan yang ada pada HEV dalam hal strategi pengaturan torsi, pada penelitian ini digunakan metode neuro-fuzzy. Kontroler neuro-fuzzy memiliki keunggulan pada kemampuan adaptasi. Pada penelitian menggunakan multi-input neuro-fuzzy invers model yang bertujuan untuk mendapatkan hasil estimasi torsi. Sehingga nantinya dapat diketahui berapa besar torsi yang dibutuhkan agar dapat mencapai kecepatan yang diinginkan. Berdasarkan hasil pengujian didapatkan respon kecepatan HEV yang dapat mencapai referensi yang diberikan dan cepat melakukan proses adaptasi terhadap perubahan parameter sistem. Sehingga kontroler neuro-fuzzy prediktif yang telah dirancang dapat melakukan strategi pengaturan torsi pada HEV untuk mencapai kecepatan yang diinginkan.
Kata Kunci: Hybrid Electric Vehicle (HEV), Strategi Pengaturan Torsi, Neuro-Fuzzy, Multi-input Neuro-Fuzzy Invers Model.
Pendahuluan
Hybrid Electric Vehicle (HEV) adalah kendaraan yang memiliki minimal dua sumber energi yang berbeda. Kombinasi yang paling umum saat ini adalah sebuah mesin pembakaran internal dan baterai listrik. HEV menggunakan mesin bakar (ICE) dengan kapasitas yang lebih kecil dibandingkan kendaraan konvensional, hal ini mengakibatkan penggunaan bahan bakar menjadi lebih hemat. Pada saat mesin bakar tidak mampu mempertahankan kecepatan maka motor DC akan membantu memberikan tenaga, sehingga dengan menggunakan bahan bakar yang sedikit kendaraan masih dapat mempertahankan performa terbaiknya [1].
Terdapat beberapa permasalahan yang ada pada HEV, diantaranya adalah bagaimana cara agar motor listrik dapat bekerja secara optimal dalam hal membantu motor bakar untuk mencapai kecepatan yang diinginkan. Salah satu cara untuk mengatasi permasalahan tersebut adalah strategi pengaturan torsi pada HEV [2], [3]-[5]. Strategi pengaturan torsi pada dasarnya adalah pengaturan arus, sehingga dapat diperkiran berpakah nilai arus yang terukur pada HEV apabila diberikan variasi beban yang diberikan.
Dari berbagai uraian di atas, maka pada penelitian ini membahas startegi pengaturan torsi pada HEV menggunakan metode neuro-fuzzy dengan menggunakan multi-input neuro-fuzzy invers model
IV-12 SENTRA
hal ini perubahan parameter pada saat terjadi perubahan kecepatan. Diharapkan pada saat terjadi perubahan parameter, kontroler dapat dengan cepat mengatasinya menggunakan metode pembelajaran yang telah dirancang.
Metode Penelitian
HEV merupakan suatu kendaraan dengan penggerak berupa gabungan antara Internal Combustion Engine (ICE) dan motor DC. Simulator HEV yang digunakan pada penelitian ini mengambil prinsip yang sama dengan HEV. Simulator HEV yang digunakan menggunakan konfigurasi paralel, dimana ICE bertindak sebagai penggerak utama sedangkan motor DC bertindak sebagai penggerak pembantu ketika proses akselerasi dan pemberian beban. Gambar 1 berikut merupakan bentuk fisik simulator HEV.
Gambar 1. Simulator HEV
Strategi pengaturan torsi pada dasarnya adalah pengaturan arus, sehingga dapat diperkirakan besar arus yang dibutuhkan untuk dapat mencapai torsi yang diinginkan. Oleh karena itu terdapat estimator untuk pengukuran torsi. Dari blok diagram sistem terdapat multi-input neuro-fuzzy invers model yang digunakan untuk mengestimasi torsi. Konfigurasi sistem kontrol pada penelitian ini ditunjukkan oleh Gambar 2.
Gambar 2. Blok Diagram Sistem
Identifikasi dan Pemodelan Sistem
Proses identifikasi bertujuan untuk mencari parameter-parameter dari sistem. Prameter-parameter yang sudah didapatkan digunakan untuk membuat model matematis dari sistem. Pada penelitian ini, identifikasi ICE dilakukan dengan menggunakan metode strejc [6]. Metode strejc
adalah salah satu metode identifikasi yang dilakukan dengan cara menarik garis singgung pada respon plant.
Identifikasi ICE dilakukan pada saat pembebanan nominal. Pembebanan nominal dilakukan dengan memberikan tambahan beban dari rem elektromagnetik sebesar 40 V. Nilai merupakan nilai bukaan throttle yang didapatkan dengan menginjak pedal gas hingga kecepatan putar 1500 rpm.
SENTRA IV-13 (1)
Gambar 3 berikut adalah hasil identifikasi dan pemodelan ICE dengan metode strejc.
Gambar 3. Hasil Identifikasi dan Pemodelan ICE
Pada penelitian ini digunakan motor DC dengan konfigurasi paralel. Motor DC dengan konfigurasi paralel memiliki karakteristik non linier terhadap arus jangkar, arus medan, dan torsi motor. Blok diagram motor DC konfigurasi paralel dapat dilihat pada Gambar 4.
Gambar 4. Blok Diagram Motor DC Konfigurasi Paralel
Perancangan Kontroler Neuro-Fuzzy [7]
Pada penelitian ini digunakan kontroler Neuro Fuzzy untuk mengatur torsi dari HEV. Kontroler
Neuro Fuzzy digunakan untuk mengatur batas nilai referensi torsi dari selisih kecepatan referensi dengan kecepatan aktual. Kontroler Neuro Fuzzy yang digunakan adalah kontroler Neuro Fuzzy
Larsent karena hanya diperlukan perbaikan nilai tengah dari himpunan pendukung sinyal kontrol dan
rule base yang digunakan tetap.
IV-14 SENTRA
Pada tahap Forward Propagation dilakukan perhitungan untuk memperoleh nilai dari sinyal kontrol. Tahapan ini terdiri dari 5 lapisan yang setiap lapisan berisi proses perhitungan fuzzy.
Lapisan 1:
Lapisan pertama merupakan lapisan masukkan dari error dan delta error, dengan nilai bobot 1. Hasil keluaran pada proses ini diperoleh dari Persamaan 2 dan akan menjadi masukkan pada lapisan kedua yang akan melakukan proses fuzzifikasi.
O1,1=e , O2,1=de (2)
Lapisan 2:
Lapisan kedua berfungsi sebagai membership function untuk mengekspresikan nilai linguistik dari variabel linguistik masukkan. Lapisan ini menjalankan proses fuzzifikasi, misalnya jika digunakan fungsi segitiga maka persamaan dalam node ini seperti pada Persamaan 3 dengan masukkan node dari Persamaan 4.
Lapisan ketiga merupakan lapisan basis aturan dengan menggunakan tabel Mack Vicar Wheelan seperti Tabel 2.
Tabel 1. Tabel Basis Aturan Mack Vicar Wheelan ue1 ue2 ue3 ue4 ue5
Dengan masukkan dari fungsi keanggotan error dan delta error diperoleh nilai dari basis aturan.
Lapisan 4 :
Hasil dari basis aturan kemudian dihitung dalam operasi inferensi pada lapisan keempat. Operasi yang digunakan seperti pada Persamaan 5 dan Persamaan 6, sehingga bobot pada lapisan ini bernilai 1 karena pada proses backward nanti tidak dilakukan proses revisi pada operasi inferensi ini.
n×m
r = w Rij ; untuk i = 1,2,...,n×m
i,4 j=1 (j,3)
SENTRA IV-15
n
Oi,4= ri,4 ; untuk i = 1,2,...,n
i=1 (6)
Lapisan 5 :
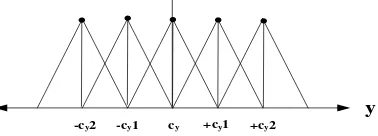
Proses defuzzifikasi padalapisan ini menggunakan fungsi singleton seperti Gambar 7.
μy
y
cy
-cy1 +cy1 +cy2
-cy2
Gambar 7. Fungsi Singleton sinyal keluaran
Proses perhitungan dilakukan dengan Persamaan 7 dengan nilai bobot berupa nilai tengah dari fungsi. Nilai tengah ini nanti yang akan direvisi nilainya supaya sinyal keluaran atau sinyal kontrol dapat sesuai dengan yang dibutuhkan sistem.
n
c × Uyi i
i=1
y= n
Uyi i=1
(7)
Pada proses backward atau proses revisi bobot hanya dilakukan pada lapisan kelima yaitu lapisan defuzzifikasi untuk menghasilkan sinyal kontrol. Revisi bobot berupa revisi nilai tengah dari fungsi keanggotaan fungsi sinyal kontrol. Untuk menghitung bobot atau nilai tengah baru digunakan Persamaan 8.
B L
c (i) = c (i) + y y α × enum × 1 × Uy(i) (8)
Hasil Penelitian dan Pembahasan
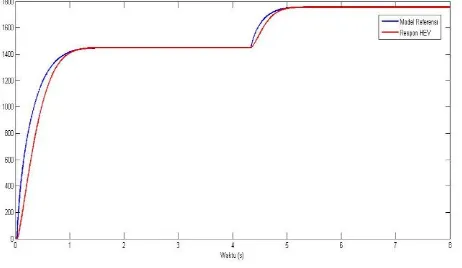
Pada penelitian ini dilakukan pengujian terhadap respon dari kontroler yang telah dirancang. Gambar 8 berikut adalah hasil respon HEV dibandingkan dengan respon sinyal referensi.
Gambar 8.Respon HEV Terhadap Sinyal Referensi
Dari hasil respon HEV dapat diketahui bahwa sistem telah dapat mencapai kecepatan yang diinginkan yaitu sebesar 1448 rpm. Respon dapat mencapai keadaan steady state pada saat t= 0.8 s.
IV-16 SENTRA
Gambar 9.Respon HEV dengan Perubahan Amplitudo.
Dari hasil respon HEV dapat diketahui bahwa sistem dapat mengikuti perubahan amplitudo yang diberikan. Hal ini berarti sistem berubah sesuai dengan masukan yang diberikan.
Kesimpulan
Dari hasil pengujian dapat diketahui bahwa strategi pengaturan torsi dengan menggunakan
neuro-fuzzy prediktif dapat mencapai hasil yang diharapkan. Hal ini dibuktikan dengan pengujian terhadap sinyal referensi dan perubahan amplitudo.
Pada saat pengujian dengan sinyal referensi sistem dapat mengikuti sinyal referensi yang diinginkan dan dapat memiliki waktu yang cepat untuk mencapai keadaan steady state, yaitu saat t= 0.8 s. Sedangkan dengan diberikan masukan berupa perubahan amplitudo, sistem dapat mencapai input masukan yang diberikan sesuai dengan perubahan amplitudo.
Strategi pengaturan torsi yang dilakukan dengan menggunakan metode neuro-fuzzy pada sistem HEV dapat membantu kinerja dari ICE untuk mencapai kecepatan yang diinginkan. Dengan adanya prediktor diketahui mampu untuk memprediksi besar torsi yang dibutuhkan oleh motor DC untuk membantu ICE. Sehingga sistem dapat mencapai kecepatan yang diinginkan.
Referensi
Jurnal:
[1] Li Weimin, Guoqing Xu dan Yangsheng Xu. “A Hybrid Controller Design For Parallel Hybrid Electric Vehicle”. Integration Technology, 2007. ICIT '07. IEEE International Conference on . pp: 450-454. 2007.
[2] Mohebbi M, Charkhgard M, and Farrokhi M. “Optimal Neuro-Fuzzy Control of Parallel Hybrid Electric Vehicles”. IEEE Vehicle Power and Propulsion Conference. pp: 26-30. 2005.
[3] Yi Zhang, Heping Liu dan Huabin Wang. “Torque Control Strategy for Parallel Hybrid Electric Vehicles using Fuzzy Logic”. WSEAS Transactions on Systems. Volume: 10. Issue: 4. 2011. [4] Shicun Yang, Ming Li, Haoyu Weng, Bao Liu, Qiang Li, Yongli Zhu, Xiu Liu. “Research on
Genetic-fuzzy Control Strategy for Parallel Hybrid Electric Vehicle”. World Electric Vehicle Journal. Volume: 4. 2010.
[5] Yun Zhang, Xiumin Yu, Mingshuang Bi, Sina Xu. “An Adaptive Neural PID Controller for Torque Control of Hybrid Electric Vehicle”. IEEE. Computer Science & Education (ICCSE), 6th International Conference on. pp: 901-903. 2011.
[6] Ing. Jakoubek, Pavel, “ Experimental Identification of Stabile Nonoscillatory Systems from Step-Responses by Selected Methods”, Konference studentské tvůrčí činnosti, 2009.
TextBook: