BAGIAN I
PEMODELAN MOTOR DC
2.1. Teori Operasi
Diketahui bahwa torsi maksimum dihasilkan ketika dua fluks dalam kuadratur. Fluks dihasilkan oleh dua pembawa arus konduktor, dengan jalur fluks adalah reluktansi baja yang rendah.
Kumparan 1 (belitan medan) belitan pada kutub menghasilkan fluks Фf dengan arus masukkan if. Kumparan 2 (belitan jangkar) pada permukaan berputar menghasilkan fluks Фa dengan arus ia.Pada posisi tertentu, dua fluks yang saling tegak lurus yang menghasilkan torsi maksimum pada rotor dan bergerak searah jarum jam. Jika diasumsikan bahwa rotor telah bergerak 180o, kumparan B1, B2, dan B3 akan berada di bawah kutub selatan dan membawa arus negatif. Torsi akan seperti rotor yang bergerak dalam arah berlawanan, menjaga rotor tetap berosilasi. Agar torsinya seragam dan searah jarum jam, belitan jangkar perlu membawa arus dengan polaritas yang sama di bawah kutub medan.
2.2. Gaya Gerak Listik Induksi (emf- Electromotive Force)
Persamaan untuk ggl induksi dan torsi pada mesin dengan kutub P,konduktor jangkarZ dalam medan dengan fluks per kutub Фf dan berputarФr rpm, berdasarkan hukum Faraday didapatkan persamaan induksi
e
=
Z
d f
ϕ
dt
=
Z
f
ϕ
t
, dimana t merupakan waktu konduktor untuk memotongfluksi, sehingga
t
=
1
2
(
P
2
)
(
nr
60
)
, sehingga didapatkan persamaan ggl induksi
Jika konduktor jangkar dibagi menjadi 'a' jalur paralel, maka
e
=
Z
ϕ
fPnr
60
a
, dimana a=2 (untuk belitan gelombang) dan a=P (untuk belitan lap) atau dapat dituliskan dalam persamaan e=K fωmϕ denganK
=
(
P
a
)
Z
(
1
2
π
)
danωm
=
2
πnr
2.3. Rangkaian Ekivalen dan Torsi Elektromagnetik
Rangkaian ekivalen jangkar motor dc didasarkan pada kenyataan bahwa belitan jangkar memiliki resistansi, induktansi sendiri, dan ggl induksi. Berikut persamaan dan gambar rangkaian ekivalen jangkar motor dc.
v
=
e
+
Raia
+
La
dia
dt
, pada keadaan steady state arus jangkar konstan dan persamaan tegangan menjadi v=e+Raia . pada persaan daya menjadivi
=
ei
+
Raia
2 .Raia2 merupakan rugi tembaga pada jangkar dan via adalah total daya input. Karena itu eia merupakan daya efektif yang ditransformasikan dari bentuk listrik ke bentuk mekanik yang disebut daya pada celah udara dengan persamaan:
Pa
=
ωmTe
=
eia
2.4 Pemodelan Elektromekanik
J
dωm
dt
+
B
1
ωm
=
Te
−
T
1
=
Ta
, dimana J merupakan momen inersia (kg-m2/sec2) dan B1 merupakan koefisien gesekan (N-m/(rad/sec))
2.5 Pemodelan State-space
Dimana p merupakan turunan
terhadap waktu, sehingga persamaan di atas dapat disederhanakan menjadi
X
'=
AX
+
BU
.Akar dari matriks A adalah
2.6 Blok Diagram dan Fungsi Alih
Dengan menggunakan transformasi Laplace didapatkan persamaan A
=
B =
X =
dan . Pada blok diagram 2.3 terdapat hubungan
ωm
(
s
)
V
(
s
)
danωm
(
s
)
T
1
(
s
)
, dimanadan
sehingga didapatkan
persamaan .
2.7 Medan Eksitasi
2.7.1 Mesin DC Penguat Terpisah
Pada gambar 2.4 menjelaskan bahwa kontrol yang bebas pada arus medan dan arus jangkar sederhana, tetapi menghasilkan control yang tinggi pada mesin. Hal ini disebabkan oleh pengontrolan torsi dan fluksi yang bebas dan tepat. Fluksi medan dikontrol dengan mengontrol arus medan, dimana medan konstan, torsi sebanding dengan arus jangkar. Oleh karena itu hanya dengan mengatur variabel ini maka dinamika sistem penggerak motor dapat dikontrol.
2.7.2 Mesin DC Shunt
Mesin DC Shunt memiliki belitan medan yang dihubungkan parallel dengan belitan jangkar dan kecepatannya tidak bergantung pada beban. Kecepatannya dapat dikendalikan dengan memasang tahanan seri dengan jangkar. Pada gambar 2.5 menjelaskan bahwa mesin dc shunt tidak memerlukan catu daya terpisah seperti halnya mesin dc penguat terpisah. Pada tegangan masukkan yang konstan, arus medan dan fluksi medan juga konstan. Total arus merupakan hasil penjumlahan dari arus medan dan arus jangkar atau pada arus medan.
2.7.3 Mesin DC Seri
[image:4.595.70.512.74.244.2]mesin dc shunt, tetapi dalam mengendalikan antara arus medan dan arus jangkar tidak bebas. Torsi elektromagnetik sebanding dengan kuadrat arus jangkar, karena arus medan sama dengan arus jangkar.
2.7.4 Mesin DC Kompon
Mesin DC kompon merupakan gabungan dari motor DC seri dan shunt. Pada gambar 2.9 terlihat bahwa terdapat dua jenis mesin DC kompon, yaitu mesin DC kompon panjang dan pendek. Mesin DC kompon panjang memiliki medan shunt yang meliputi medan seri dan belitan jangkar, sedangkan mesin DC kompon pendek medan shunt parallel dengan belitan medan.
2.7.5 Mesin DC Magnet Permanen
Keuntungan dalam penggunaan magnet permanen terdapat pada struktur medan dan berkurangnya rugi resistif (panas) dalam belitan medan.
2.8 Perhitungan Konstanta Motor
Metode percobaan ini berlaku pada motor DC penguat terpisah. 1. Resistansi Jangkar
Besar resistansi jangkar diujur antara terminal jangkar dengan menerapkan sirkulasi arus jangkar. Terdapat pengaruh sikat dan resistansi kontak dari pengukuran untuk memperbaiki suhu saat dioperasikan dalam keadaan steady satate.
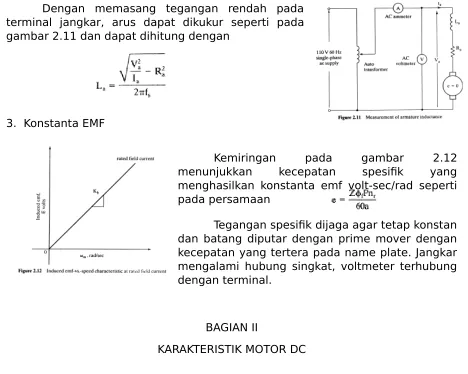
Dengan memasang tegangan rendah pada terminal jangkar, arus dapat dikukur seperti pada gambar 2.11 dan dapat dihitung dengan
3. Konstanta EMF
Kemiringan pada gambar 2.12 menunjukkan kecepatan spesifik yang menghasilkan konstanta emf volt-sec/rad seperti pada persamaan
Tegangan spesifik dijaga agar tetap konstan dan batang diputar dengan prime mover dengan kecepatan yang tertera pada name plate. Jangkar mengalami hubung singkat, voltmeter terhubung dengan terminal.
BAGIAN II
KARAKTERISTIK MOTOR DC
2.1 Hubungan Dasar
Kita ketahui bahwa terdapat 3 persamaan dasar pada motor DC, yaitu: 1.
V
=
E
+
Ia . Ra
2. 3.
2.2 Karakteristik Dasar
Terdapat tiga karakteristik dasar pada motor DC, yaitu kecepatan sebagai fungsi arus jangkar, torsi sebagai fungsi arus jangkar, dan kecepatan sebagai fungsi torsi.
- V : tegangan terminal mesin (volt) - E : ggl induksi (volt)
- Ia : arus jangkar (ampere) - Ra : resistansi jangkar (ohm) - P : jumlah kutub mesin - A : jumlah jalur paralel pada
jangkar
- Ф : fluksi per kutub (weber) - Z : jumlah konduktor jangkar - ω :kecepatan sudut pada jangkar
[image:6.595.66.534.70.444.2]2.2.1 Karakteristik Dasar Motor DC Shunt
- Karakteristik kecepatan sebagai fungsi arus jangkar
ω
=
f
(
Ia
)
Dimana Ke merupakan konstanta. Ketika fluksi Ф konstan, ω=A−BIa , dimana
A
=
V
Ke Φ
danB
=
Ra
KeΦ
yang menjadi konstanta.- Kecepatan torsi sebagai fungsi arus jangkar
T
=
f
(
Ia
)
T=Kt .Ф a , dimana Kt merupakan konstanta. Terlihat pada gambar 3.2 pada garis putus-putus merupakan penyimpangan dari garis lurus ideal, yang terjadi terutama pada nilai yang lebih tinggi karena efek reaksi jangkar yang menurunkan torsi motor.
2.2.2 Karakteristik Dasar Motor DC Seri
- Karakteristik kecepatan sebagai fungsi arus jangkar
ω
=
f
(
Ia
)
atau
- Kecepatan torsi sebagai fungsi arus jangkar
T
=
f
(
Ia
)
Ф=K1Ia , dimana K1 merupakan konstanta, dan T= K1 Ф Ia= K1 Kt Ia2=K2 Ia2, dimana K2 merupakan konstanta.
- Kecepatan sebagai fungsi torsi ω=f
(
T)
dimana