RANCANG BANGUN LENGAN ROBOT (
ROBOTIC ARM
)
DENGAN PENGENDALIAN SECARA MANUAL
Oleh Annur Solichin
C6410404045
PROGRAM STUDI ILMU D AN TEKNOLOGI KELAUTA N
FAKULTAS PERIKANAN D AN ILMU KELAUTAN
▸ Baca selengkapnya: tuliskan cara melakukan gerakan lengan dengan bantuan pelampung
(2)PERNYATAAN MENGENAI SKRIPSI DAN SUMBER INFORMASI
Dengan ini saya menyatakan bahwa skripsi yang berjudul
RANCANG BANGUN LENGAN ROBOT (ROBOTIC ARM) DENGAN PENGENDALIAN SECARA MANUAL
adalah benar merupakan hasil karya sendiri dan belum diajukan dalam b entuk apa pun kepada perguruan tinggi manapun. Semua sumber data dan informasi yang berasal atau dikutip dari karya yang diterbitkan maupun tidak diterbitkan dari penulis lain telah disebutkan dalam teks dan dicantumkan dalam Daftar Pustaka dibagian akhir skripsi ini.
Bogor, Juli 2009
RINGKASAN
ANNUR SOLICHIN. Rancang Bangun Lengan Robot (Robotic Arm) dengan Pengendalian Secara Manual. Dibimbing oleh SRI PUJIYATI dan INDRA JAYA.
Negara Indonesia merupakan negara kepulauan yang memiliki bentangan lautan dari Sabang hingga Merauke. Kondisi ini menuntut kita untuk bisa menciptakan wahana laut yang mampu menggantikan manusia dalam melakukan kegiatan eksplorasi bawah laut.
Mikrokontroler merupakan teknol ogi terbaru yang mempermudah pengendalian rumit menjadi lebih sederhana. Saat ini teknologi berukuran mikro telah mengeser penggunaan perangkat konvensional yang membutuhkan biaya tinggi. Pemanfaatan mikrokontroler ini akan menghemat bahan, biaya dan memiliki fungsi yang banyak dibandingkan alat konvensional.
Pelaksanaan penelitian ini dilakukan dengan 2 tahap, yaitu pembuatan alat dan pengujian alat. Pada tahap pembuatan alat, penulis menggunakan bahan arkilik sebagai bahan utama rancang bangun lengan robot. Bahan ini digunakan karena bahannya mudah didapat, memiliki kekakuan dan mudah dipotong. Tahap pengujian alat dilakukan 2 jenis pengujian, yaitu pada sensor gerak danmotorik
lengan robot. Pengujian dilakukan dengan kondisi yang berbeda untuk me ncatat perubahan yang terjadi.
Desain lengan robot yang dibuat harus memenuhi fungsi dari lengan robot, yaitu mampu mengambil obyek dalam ruang tiga dimensi (panjang lebar dan tinggi). Gaya grafitasi bumi yang mengenai robot di seimbangkan dengan pemberian pemberat penyeimbang. Penyatuan bagian -bagian arkrilik penulis menggunakan lem alteco dan arkrilik siku. Deteksi gerakan sendi -sendi tangan manusia digunakan perangkat sensor gerak yang terbuat dari potensio meter putar.
Penulis melakukan penelitian in i bertujuan untuk menciptakan alat instrument untuk keperluan pengambilan obyek benda yang dikendalikan secara manual melalui sensor lengan manusia. Alat ini berguna untuk menggantikan fungsi tangan manusia dalam mengambil obyek benda berbahaya sehingga t idak beresiko bagi keselamatan penggunanya.
Pada pengujian potensio meter dengan pemberian sudut tertentu
menghasilkan nilai rasio tegangan per satuan derajat yang berbeda -beda disetiap sensor gerak. Perbedaan nilai ini terjadi karena menggunakan gear penghubung yang berbeda di setiap sendi putar. Masalah ini dapat diatasi dengan melakukan kalibrasi nilai dalam program. Pengujian sensor motoriklengan robot dilakukan dengan memberikan lebar pulsa yang berbeda dan mengukur besarnya sudut putar serta arah gerakan servo. Hasil pengukuran diperoleh hasil servo finggerdanarm
akan berputar dengan besar sudut positif apabila diberikan lebar pulsa yang besar sedangkan untuk servowrist, elbow,danshouldermelakukan kondisi sebaliknya.
RANCANG BANGUN LENGAN ROBOT (
ROBOTIC ARM
)
DENGAN PENGENDALIAN SECARA MANUAL
Skripsi
Sebagai salah satu syarat untuk memperoleh gelar sarjana perikanan Pada Fakultas Perikanan dan Ilmu Kelautan
Institut Pertanian Bogor
Oleh: Annur Solichin
C64104045
PROGRAM STUDI ILMU D AN TEKNOLOGI KELAUTA N
FAKULTAS PERIKANAN D AN ILMU KELAUTAN
© Hak cipta milik Annur Solichin tahun 2009
Hak cipta dilindungi
SKRIPSI
Judul : RANCANG BANGUN LENGAN ROBO T
(ROBOTIC ARM) DENGAN PENGENDALIAN SECARA MANUAL
Nama : Annur Solichin
NRP : C64104045
Departemen : Ilmu dan Teknologi Kelautan
Disetujui
Pembimbing 1 Pembimbing 2
Dr. Ir. Sri Pujiyati Prof. Dr. Indra Jaya
NIP. 19671021.199203.2.002 NIP. 19610410.198601.1.002
Mengetahui
Dekan Fakultas Perikanan dan Ilmu Kelautan
Prof. Dr. Indra Jaya NIP. 19610410.198601.1.002
KATA PENGANTAR
Penulis mengucapkan syukur alhamdulillah kehadirat Illahi Robbi atas
semua rahmat dan karunia -Nya yang telah memberikan jalan kemudahan kepada
penulis sehingga tugas akhir penelitian ini dapat terselesaikan. Penelitian yang
berjudulRancang Bangun Lengan Robot (Robotic Arm) dengan Pengendalian Secara Manual dilakukan oleh penulis sebagai salah satu syarat untuk dapat gelar sarjana S1.
Dalam kesempatan ini penulis me ngucapkan terima kasih yang sebesar
-besarnya kepada Ibu Dr. Ir. Sri Pujiyati, M.Si, selaku dosen Pembimbing Utama,
Bapak Prof. Dr. Indra Jaya, M.Sc, selaku dosen Pembimbing Anggota dan yang
telah membantu sebagian dana untuk melakukan penelitian ini. Tak lupa saya
ucapkan terimakasih kepada Abang Iqbal yang telah bersedia membantu
memberikan bimbingan dalam ilmu program pada alat yang dibuat oleh penulis.
Tak lupa ucapan terima kasih ditujukan kepada Bapak Sukirno dan Ibu Kundrini
selaku orang tua penulis yang selalu memberi nasehat terbaik bagi anaknya serta
kepada semua dosen dan teman -teman yang telah memberikan dorongan dan
bantuan dalam penyusunan tugas akhir penelitian ini.
Penulis menyadari setiap insan manusia selalu diliputi dengan kesalahan
dan kekurangan maka dari itu penulis memohon maaf yang besar apabila terdapat
perbuatan yang kurang berkenan. Penulis berharap tugas akhir ini dapat
memperkaya wawasan akan terknologi robotika untuk bidang kelautan baik bagi
mahasiswa kelautan maupun orang lai n.
Bogor, Juli 2009
DAFTAR ISI
Halaman
DAFTAR TABEL ... x
DAFTAR GAMBAR ... xi
DAFTAR LAMPIRAN ... xiii
1. PENDAHULUAN ... 1
1.1... ... ... .. Latar Belakang ... 1
1.2. Tujuan Penelitian ... 2
2. TINJAUAN PUSTAKA ... 3
2.1. Model lengan robot (robotic arm) ... 3
2.2. Mikrokoprosesor ... 3
2.3. Mikrokontroler ATMEL ... 4
2.4. Mikrokontroler ATMega8535 ... 5
2.5.Boardmikrokontroler ATMega8535 ... 7
2.6. ADC ... 7
2.7. PWM (Pulse Width Modulation) ... 9
2.8. Motor servo lengan robot (robotic arm) ... 10
2.9. Program lengan robot (robotic arm) ... 11
2.10. Bahasa program lengan robot (robotic arm) ... 11
2.11. Perangkat penginderaan (sensor) ... 12
2.12. Sejarah perkembangan lengan robot ... 13
3. METODE PENELITIAN ... 15
3.1. Tempat dan waktu penelitian ... 15
3.2. Alat bantu ... 15
3.2.1. Alat ukur dan peralatan pembuatan lengan robot ... 15
3.2.2. Software pembuatan lengan robot ... 15
3.3. Bahan untuk membuat lengan robot, kontroler, dan sensor .... 15
3.4. Proses pembuatan lengan robot (robotic arm) ... 16
3.5. Unit motor servo lengan robot (robotic arm) ... 16
3.6. Unit motor sensor lengan robot (robotic arm) ... 18
3.7. Unit catu daya mikrokontroler lengan robot (roboticarm) ... 18
3.8. Unit catu daya motor servo lengan robot (roboticarm) ... 19
3.9. Mikrokontroler lengan robot (robotic arm) ... 19
3.10. Proses berjalannnya program lengan robot (robotic arm) ... 20
3.11. Pengunjian lengan robot (robotic arm) ... 22
lebar pulsa ... 23
3.11.3. Pengujian daya cengkramgripperlengan robot (robotic arm) ... 23
4. HASIL DAN PEMBAHASAN ... 24
4.1. Hasil rangkaian lengan robot (robotic arm) ... 24
4.2. Desain pelindung motor servo RAMCES -5 ... 25
4.2.1. Desain motor servo fingger ... 25
4.2.2. Desain motor servo wristdanarm ... 27
4.2.3. Desain motor servo elbow ... 27
4.2.4. Desain motor servo shoulder ... 29
4.2.5. Desain persambungan sendi RAMCES -5 ... 31
4.3. Desain beban penyeimbang motor servo RAMCES -5 ... 31
4.3.1. Desain penyeimbang servo 1 ... 31
4.3.2. Desain penyeimbang servo 2 ... 33
4.3.3. Desain penyeimbang servo 3 ... 34
4.3.4. Desain penyeimbang servo 4 ... 35
4.4. Desain sensor pengendali RAMCES -5 ... 36
4.4.1. Desain sensorfingger ... 36
4.4.2. Desain sensorwrist ... 37
4.4.3. Desain sensorarm ... 38
4.4.4. Desain motor servo elbow ... 39
4.4.5. Desain motor servo shoulder ... 41
4.5. Rangkaian kontroler RAMCES -5 ... 42
4.6. Hasil perhitungan perangkat keras RAMCES -5 ... 43
4.6.1. Tegangan keluaran sensor RAMCES -5 ... 43
4.6.2. Besar sudut servo RAMCES -5 dengan perbedaan lebar pulsa ... 44
4.6.3. Daya cengkram gripper ... 45
4.7. Perangkat lunak pengendali RAMCES -5 ... 46
5. KESIMPULAN DAN SARAN ... 48
5.1. Kesimpulan ... 48
5.2. Saran ... 48
DAFTAR PUSTAKA ... 49
LAMPIRAN ... 52
DAFTAR TABEL
Halaman
1. Perkembangan lengan robot di dunia ... 13
2. Spesifikasi jenis motor servo fingeryang dipakai ... 17
3. Spesifikasi jenis motor servo wristdanarmyang dipakai ... 17
4. Spesifikasi jenis motor servo elbow danshoulderyang dipakai . 17
5. Hasil pengukuran tegangan yang dikeluarkan sensor pada sudut
maksimum dan minimum ... 22
6. Hasil pengukuran lebar pulsa dan sud ut yang dapat dibuat ... 23
7. Hasil pengujian daya cengkram gripperpada berbagai macam
bentuk obyek ... 26
8. Hasil pengukuran tegangan yang dikeluarkan sensor pada sudut
maksimum dan minimum ... 43
9. Hasil pengukuran lebar pulsa dan sudut yang dapat dibuat ... 44
10. Hasil pengujian daya cengkram gripperpada berbagai macam
DAFTAR GAMBAR
Halaman
1. Bagian dasar konverer analog ke digital ... 8
2. Potensio meter sebagai sensor posisi ... 12
3. Penampang potensio meter bagian dalam ... 13
4. Tahapan pembuatan lengan robot ... 16
5. Rangkaian pengatur tegagan pada sensor lengan robot ... 18
6. Rangkaian power supply kontroler lengan robot ... 18
7. Rangkaian power supply motor servo lengan robot ... 19
8. Rangkaian mikrokontroler lengan robot ... 20
9. Flowchartprogram pada rangkaian lengan robot (robotic arm) ... 21
10. Tampak samping desain RAMCES-5 ... 25
11a. Tampak atas desain pelindung motor servo 1 ... 26
11b. Tampak depan desain pelindung motor servo ... 26
12. Tampak atas desaingripper dari servo 1 ... 26
13a. Tampak atas desain motor servo 2 dan 3 ... 37
13b. Tampak depan desain motor servo 2 dan 3 ... 37
14a. Tampak atas desain motor servo 2 dan 3 ... 28
14b. Tampak samping desain pelindung motor 4 ... 28
15. Tampak atas desain pelindung motor 4 ... 29
16. Tampak atas desain motor servo 5 ... 29
18. Tampak atas desain motor servo 5 ... 31
19. Tampak samping desain penyeimbang servo 1 ... 32
20. Tampak samping bentuk jadi penyeimbang servo 1 ... 32
21. Tampak samping desain penyeimbang servo 2 ... 33
22. Tampak samping bentuk jadi penyeimbang servo 1 ... 34
23. Tampak belakang desain penyeimbang servo 3 ... 34
24. Tampak depan bentuk jadi penyeimbang servo 3 ... 35
25. Tampak samping desain penyeimbang servo 4 ... 35
26. Tampak samping bentuk jadi penyeimbang servo 1 ... 36
27. Tampak bawah sensorfingger ... 37
28. Tampak bawah sensorwrist ... 38
29. Tampak atas servo wrist ... 38
30. Tampak bawah sensorarm ... 39
31. Tampak bawah sensorarm ... 39
32. Tampak bawah sensorelbow ... 40
33. Tampak Tampak depan sensor shoulder ... 41
DAFTAR LAMPIRAN
Halaman
1. Referensi capit untuk RAMCES-5 ... 53
2. Bentuk mikrokontroler dan IC ATMega853 5 ... 54
3. Data sheet ATMega8535 ... 55
4. BentukboardDT-AVR Low Cost Micro System ... 57
5. Ilustrasi duty cycle dan lebar pulsa ... 58
6. Bentuk dan bagian-bagian motor servo ... 59
7. Ilustrasi pemberian lebar pulsa pada motor servo ... 61
8. Sejarah perkembangan lengan robot ... 63
9. Bentuk lengkap dan bagian -bagian RAMCES-5 ... 68
10. Sensor RAMCES-5 ... 70
11. Bentuk sensor RAMCES-5 saat digunakan ... 71
12. Data sheet regulator kontroler ... 72
13. Keadaangrippersaat membuka dan menutup capit ... 76
1. PENDAHULUAN
1.1. Latar belakang
Perkembangan teknologi berbasis mikrokontroler pada abad -21 terjadi
dengan sangat cepat. Kemajuan ini dapat dirasakan dengan munculnya
banyaknya peralatan mutakhir yang bisa dioperasikan dengan mengguna kan
komputer maupun beberapa tombol sederhana. Hampir keseluruhan peralatan
elektronik yang berada disekitar kita telah dikendalikan dengan adanya mikrochip
dan mikrokontroler, bahkan dalam skala kecil seperti pabrik pembuatan mobil dan
motor. Kemajuan teknologi secara langsung telah membantu umat manusia lebih
mudah melakukan hal yang dianggap sulit.
Hadirnya produsen-produsen elektronika di Indonesia dan dunia telah
mendorong terciptanya persaingan harga yang kompetitif sehingga mikrokontroler
dan alat pendukungnya menjadi lebih murah. Mikrokontroler saat ini telah dapat
melakukan banyak hal tanpa membutuhkan banyak peralatan elektronik oleh
sebab itu pada penelitian ini penulis lebih fokus pada penggunaan mikrokontroler
sebagai sarana pengenda li lengan robot. Hal ini untuk mengatasi kekurangan
tubuh manusia bila berada di dalam air. Tubuh manusia akan mendapatkan
tekanan yang besarnya sama dengan volume air yang dipindahkan. Semakin
dalam manusia menyelam maka akan semakin tinggi tekanan yan g diterima oleh
tubuh sehingga dalam menyelam manusia hanya terbatas pada kedalam tertentu.
Penelitian ini dilakukan sebagai salah satu jalan untuk memberikan cara yang
lebih mudah bagi manusia mengeksplorasi lingkungan bawah laut terutama di
1.2. Tujuan penelitian
1. Merancang alat yang mampu melakukan pengambilan obyek tertentu
yang dapat dikendalikan secara manual melalui sensor lengan tangan
manusia.
2. TINJAUAN PUSTAKA
2.1. Model lengan robot (robotic arm)
Penulis membuat lengan robot menggunakan sistem kontrol gerak holomonic.
Gerak holomonic merupakan sistem gerak yang serupa dengan gerak ujung pensil
atau pulpen ke segala arah di permukaan kertas sesuai de ngan keinginan
(Pitowarno, 2006). Penerapan sistem gerak holomonic memungkinkan lengan
robot dapat menjangkau segala arah dengan mudah. Lengan robot yang dibuat
oleh penulis lebih menitik beratkan pada jenis kontrol kinematika dengan
memanfaatkan program pada mikrokontroler karena memiliki struktur dinamika
yang rumit. Pitowarno (2006) menjelaskan bahwa untuk robot yang memiliki
struktur dinamika yang rumit sering kali model matematika dinamiknya tidak
mungkin dideskripsikan secara rinci dan ideal. Menu rut Pitowarno (2006) pada
kenyataannya dalam aplikasi para enginerlebih suka menghindari analisis
dinamik yang rumit dan lebih memfokuskan kajiannya dalam mempercanggih
kontrol kinematik.
Bagian tangan robot dikenal sebagai manipulatortangan, yaitu sistem gerak
yang berfungsi untuk memanipulasi (memegang, mengambil, mengangkat,
memindah atau mengolah) obyek (Pitowarno, 2006). Untuk melakukan
pengambilan obyek lengan robot ini dilengkapi dengan gripper(pemegang).
Gripper jenis capit telah teruji pada robot Lynx5 dalam mencengkram obyek bulat
yang ditampilkan pada Lampiran 1.
2.2. Mikrokoprosesor.
input yang diterima dari sebuah sistem digital (Budiharto, 2005). Winoto (2008)
menjelaskan bahwa mikrokontroler adalah sebuah sistem mikroprosesordimana
di dalamnya sudah terdapat CPU, ROM, RAM, I/O, Clockdan peralatan internal
lainya yang sudah saling terhubung dan terorganisasi (teralamati) dengan baik
oleh pabrik pembuatnya dan dikemas dalam satu chip yang siap dipakai.
Winoto (2008) menjelaskan ALU adalah Processoryang bertugas
mengeksekusi (eksekutor) kode program yang ditunjuk oleh program counter.
Programcounter(PC) merupakan komponen yang bertugas menu njukkan ke
ALU alamat program memori yang harus diterjemahkan kode programnya dan
dieksekusi (Winoto, 2008). Hampir semua pemrosesan data dilakukan di dalam
ALU di dalam CPU.
2.3. Mikrokontroler ATMEL
ATMEL merupakan pemimpin global dalam desain dan manufaktur dari
mikrokontroler, dan komplementer produk seperti capacitive touch sensing ICS,
ASICs, nonvolatil memori dan komponen frekuensi radio. Ada beberapa vendor
yang membuat mikrokontroler diantaranya Intel, Microchip, Winbond, Atmel,
Philips, Xemics dan lain - lain. Beberapa vendor tersebut, yang paling populer
digunakan adalah mikrokontroler buatan Atmel (RIZKALINDO, 2008).
Penggunaan mikrokontroler jenis ATMEL telah menyebar luas didunia sebab
memiliki keunggulan dari segi kemampua n dan harga. Mikrokontroler ini
memiliki kemampuan yang sama dengan mikrokontroler yang lain dengan
perangkat pendukung yang tidak terlalu banyak, seperti kristal, resistor dan
Budiharto (2005) menjelaskan bahwa di dala m mikrokontroler terdapat
bagian-bagian pendukung proses pengolahan data yang diterima, diantaranya:
1. CPU(Central Processing Unit)
Tempat terjadinya proses pengolahan data yang diterima.
2. RAM(Random Access Memory)
Tempat menyimpan data sementara sebelum di proses oleh CPU.
3. EPROM(Eraseable Programmable Read Only Memory)
Tempat menyimpan program secara permanen yang dapat dirubah.
4. I/O(Input/Output)
Tempat berkomunikasinya dengan perangkat keras yang terhubung diluar.
5. Timer
Tempat unit pencacahan dan delay un tuk mengatur pewaktuan.
6. Intrup Controler
Tempat mengatur dan menampung permintaan mendadak saat running.
2.4. Mikrokontroler ATMega8535
Mikrokontroler ATMega 8535 merupakan jenis mikrokontroler AVR produk
Atmel yang memiliki banyak macam dan jenisn ya. Mikrokontroler AVR (Alf and
Vegard’s Risc prosesor) memiliki arsitektur RISC 8 bit, dimana semua instruksi
dikemas dalam kode 16-bit (16-bits word) dan sebagian besar instruksi dieksekusi
dalam 1 (satu) siklus clock, berbeda dengan instruksi MCS 51 ya ng membutuhkan
12 siklus clock (RIZKALINDO, 2008).
Kedua jenis mikrokontroler ini memiliki arsitektur yang berbeda. Wardhana
(2006) menjelaskan bahwa AVR berteknologi RISC (Reduced Instruction Set
Computing). RIZKALINDO (2008) menjelaskan secara umum, AVR dapat
dikelompokkan menjadi 4 kelas, yaitu keluarga ATtiny, keluarga AT90Sxx,
keluarga ATMega dan AT86RFxx. Pada dasarnya yang membedakan masing
-masing kelas adalah memori, peripheral, dan fungsinya. Bentuk ATMega8535
ditampilkan pada Lampiran 2.
Menurut Wardhana (2006) keunggulan pemakaian ATMega 8535 disebabkan
karena memiliki fasilitasnya yang lengkap. Konfigurasi pin yang ada pada
ATMega 8535 sebagai berik ut:
1. VCC merupakan pin yang berfungsi sebagai masukan dari catu daya.
2. GND adalah pin dariground
3. Port A (PA0..PA7) adalah pin I/O dua arah dan sebagai pin masukan
ADC.
4. Port B (PB0..PB7) adalah pin I/O dua arah dan sebagai pin dengan fungsi
khusus yaitu timer/counter, komparator analog, dan SPI.
5. Port C (PC0..PC7) adalah pin I/O dua arah dan pin dengan fungsi khusus
berupa TWI, komparator analog, dan Timer Osilator.
6. Port D (PD0..PD7) adalah pin I/O dua arah dan pin dengan fungsi khusus
berupa komparator analog, interupsi eksternal, dan komunikasi serial.
7. RESET merupakan pin yang berguna untuk menset ulang mikrokontroler.
8. XTAL1 dan XTAL2 merupakan pin masukan clock eksternal.
9. AVCC merupakan pin masukan tegangan untuk ADC.
10. AREF merupakan pin masukan tegangan refe rensi ADC.
Susunan kaki dan karakteristik ATMega8535 secara lengkap ditampilkan pada
2.5. Boardmikrokontroler ATMega8535
Boardyang digunakan penulis adalah jenis DT-AVR Low Cost Micro
System keluaran pabrikan Innovative Electronics ya ng berada di Surabaya,
Indonesia. Fitur ADC pada mikrokontroler ATMega 8535 terdapat pada Port A
(PA0–PA7) (ATMEL, 2003). DT-AVR Low Cost Micro System juga memiliki
ADC hingga 8 channel single -ended A/D converter dengan resolusi 10 bit
(Innovative Electronics, 2007). Bentuk board DT-AVR Low Cost Micro System
didominasi warna merah dengan dimensi panjang 8,6 cm, lebar 7,2 cm dan tinggi
1,8 cm (Innovative Electronics, 2007). Bentuk dan penempatan pin -pin
dari board DT-AVR Low Cost Micro System ditampil kan pada Lampiran 4.
2.6. ADC
ADC adalah suatu prosedur yang dilakukan dalam memproses sinyal analog
dengan alat digital dimana sinyal analog di konversi menjadi suatu deret angka
yang mempunyai presisi terbatas (Proakis dan Manolakis, 1997). Pros es
inisialisasi ADC meliputi proses penentuan clok, tegangan referensi, format
output data, dan metode pembacaan (Budiharto, 2008). Proakis dan Manolakis
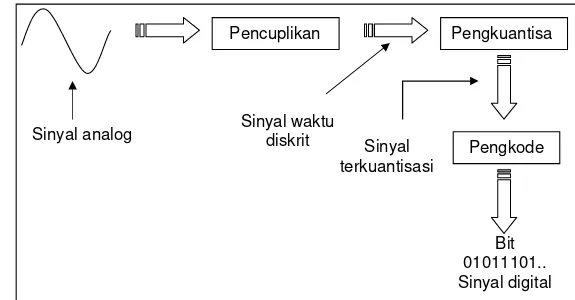
(1995) menyebutkan dalam memandang konversi Analog ke Digital (A/D) ada 3
proses yang terjadi (Gambar 1), yaitu:
1. Pencuplikan. Ini merupakan konversi suatu sinyal waktu kontinu menjadi
suatu sinyal waktu diskrit yang diperoleh dengan mengambil “cuplikan”
sinyal waktu-kontinu pada saat waktu diskrit.
2. Kuantisasi. Ini adalah konversi sinyal yang bernilai -kontinu waktu-diskrit
Pencuplikan Pengkuantisa
Pengkode Sinyal analog Sinyal waktudiskrit
Sinyal terkuantisasi
Bit 01011101.. Sinyal digital
3. Pengkodean. Dalam proses pengkodean setiap nilai diskrit digambarkan
dengan barisan bilangan biner
Sumber : Proakis dan Manolakis (1995)
Gambar 1. Bagian dasar konver ter analog ke digital (Proakis dan Manolakis, 1995)
Input pada mikrokontroler dihubungkan dengan sebuah 8 channel analog
multiplexer yang digunakan untuk singgle ended input channels (Budiharto,
2008). Menurut Wardhana (2006) masukan ana log ADC tegangan harus lebih
besar dari 0 Volt dan lebih kecil daripada tegangan referansi yang dipakai. Pada
penelitian ini digunakan tegangan tegangan referensi internal sebesar 2,56 Volt.
Tegangan referensi ADC dapat dipilih antara lain pada pin AREF pin AVCC, atau
menggunakan tegangan referensi internal sebesar 2,56 Volt (Budiharto, 2008).
Dalam penelitian ini penulis menggunakan 10 bit ADC untuk mencacah
tegangan sebesar 2,56 Volt. Nilai bit tergantung dengan kemampuan
menggunakan 10 bit ADC maka rentang output yang dihasilkan adalah dari 0
sampai 1023.
Penggunaan ADC pada lengan robot ditentukan menggunakan channel mode
single conversionmelalui program yang ada pada mikro kontroler. Mode Single
conversionadalah mode yang biasa digunakan apabila ingin menggunakan banyak
kanal (Wardhana, 2006). Mode single conversionsama dengan penghubungan
input ADC dengan dua buah input ADC. Menurut Budiharto (2008) jika
menggunakandifferensial channelhasil dari nilai 41 menjadi 40,96 yang apabila
digenapkan bisa berkisar 39, 40, 41 karena ketelitian ATMega8535
sebesar +/- 2 LSB (Least Significant Bit).
2.7. PWM (Pulse Width Modulation)
Pulse Width Modulationadalah suatu tehnik manipulasi dalam
mengemudikan motor (alat perangkat elektronik berarus besar lainnya) yang
menggunakan prisipcut-offdansaturasi(Pitowarno, 2006). Winoto (2008)
menjelaskan bahwa PWM sendiri adalah bentuk gelombang digital(pulsa) yang
bisa kita aturduty cycle-nya. Pulse With Modulation atau PWM adalah metode
canggih untuk mengatur kecepatan motor dan menghindarkan rangkaian
mengkonsumsi daya yang berlebih (Budiharto, 2006). Dengan pengaturan
konsumsi daya akan membuat alat elektronik yang dibuat lebih efisien dan hemat
energi dalam bekerja.
Saklar pada rangkaian PWM bukanlah saklar mekanik, tetapi biasanya berupa
komponen MOSFET atau Power Transistor karena Rangkaian chopping pada
PWM tidak dimungkinkan memakai relay yang memiliki reaksi y ang kurang
saat kondisi on/ high (logika 1) dan lama periode satu gelombang pulsa (Winoto,
2008). Perbandingan dari perioda ON dan perioda T disebut dengan duty cycle
(Duclin, 2008). Secara umum duty cycle merupakan lebar pulsa PWM. Gambar
perbandingan perioda duty cycle dapat dilihat pada Lampiran 5. Dengan prinsip
ini maka akan mudah mengatur lebar pulsa untuk mendapatkan kecepatan motor
DC yang diinginkan. PWM bekerja denga n pembuatan gelombang kotak
(persegi) yang merupakan variabel antara perbandingan on -off, dimana rata-rata
lamanya waktu berkisar antara 0 sampai 100 persen (Cook, 1999).
2.8. Motor servo lengan robot (robotic arm)
Motor servo merupakan sebuah motor DC kecil yang diberi sistem gear dan potensiometer sehingga dia dapat menempatkan “horn” servo pada
posisi yang dikehendaki (Malik, 2007). Motor servo ini jelas menggunakan
sistim “close loop” sehingga posisi “horn” yang dikehendaki bisa dipertahankan.
Menurut Budiharto (2006) motor servo adalah motor DC kualitas tinggi yang
memenuhi syarat untuk digunakan pada aplikasi servo seperti close control loop,
yaitu harus dapat menangani perubahan yang cepat pada posisi, kecepatan, dan
percepatan.
Secara umum terdapat 2 jenis motor servo, yaitu motor servo standarddan
motor servocontinous. Motor servo standard dapat berputar hingga 1800
sedangkan motor servo continous dapat berputar hingga 3600(Budiharto, 2006).
Jika dibandingkan dengan motor DC dan motor stepper motor servo memiliki
kecepatan putar yang rendah tapi memiliki kekuatan yang besar. Bentuk dari
Dalam motor servo sistem kontrol untuk motor relatif sedikit (diperlukan
hanya 1 jalur data saja), hal ini tentu berbeda misalnya jika menggunakan motor
stepper yang memerlukan jalur kontrol lebih dari 1 jalur (Malik, 2007). Untuk dapat membelokkan motor servo kekanan atau kekiri maka harus diberikan lebar
pulsa kepada motor servo secara berula ng-ulang. Ilustrasi pemberian lebar pulsa
pada motor servo dapat dilihat pada Lampiran 7.
2.9. Bahasa program lengan robot (robotic arm)
Program yang kita buat harus disesuaikan dengan mikrokontroler yang kita
pakai atau sesuai dengan fasilitas y ang diberikan mikrokontroler. Wahyudi
(2007) menuliskan beberapa dasar dari BASCOM 8051 diantaranya adalah
karakter dalam BASCOM, tipe data, variable, alias, konstanta, array, operasi
-operasi dalam BASCOM dan kontrol program.
2.10. Program lengan robot (robotic arm)
Pemrograman lengan robot menggunakan softwareBASCOM-AVR dengan
bahasa tingkat tinggi BASIC. Wahyudi (2007) menjelaskan penggunaan bahasa
tingkat tinggi BASIC lebih mudah dimengerti dan dipahami dibandingkan bahasa
tingkat tinggi lainnya. Bahasa BASIC merupakan jalan keluar dari sulitnya
memahami bahasa tingkat rendah assembly.
Alberts (2008) menjelaskan bahwa BASCOM AVR merupakan hasil dari
pengembangan lebih lanjut dari kompiler BASCOM 8051 dengan kelebihan dapat
2.11. Perangkat penginderaan (sensor)
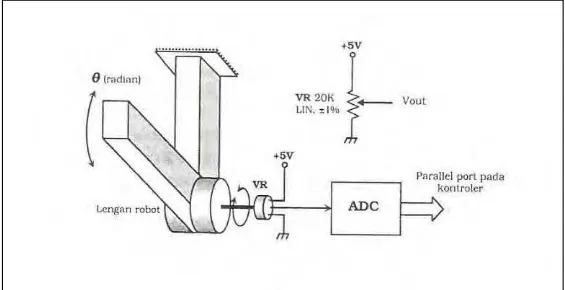
Dalam instrument ini digunakan beberapa alat elektronika yang berfungsi
sebagai sensor pada persendian tangan manusia, yaitu potensio meter. Menurut
Pitowarno (2006) potensio meter adalah sensor analog yang paling sederhana
namun sangat berguna untuk mendeteksi posisi putaran, misalnya kedudukan
sudut poros aktuator berdasarkan nilai resistansi pada putaran porosnya. Bentuk
perangkat sensor lengan robot dapat dilihat pada Gambar 2.
Sumber : Pitowarno (2006)
Gambar 2. Potensio meter sebagai sensor posisi
Potensio meter poros merupakan hambatan variable yang dapat dirubah nilai
hambatannya dengan cara memutar batang porosnya. Perputaran ini akan
menggeser kedudukan hambatannya sehingga hambatan yang terbaca berbeda
merubah hambatan yang ada didalamnya. Bentuk dan bagian potensio met er
poros dapat dilihat pada Gambar 3.
Sumber : Etisystems (2009)
Gambar 3. Penampang potensio meter bagian dalam
2.12. Sejarah perkembangan lengan robot (robotic arm)
Pengembangan robot di dunia ternyata telah ada pada jaman Le onardo da
Vinci, hingga saat ini dengan robot yang paling maju bernama ASIMO buatan
perusahaan raksasa mobil Honda negara Jepang. Ilustrasi perkembangan lengan
robot ditampilkan pada Lampiran 8.
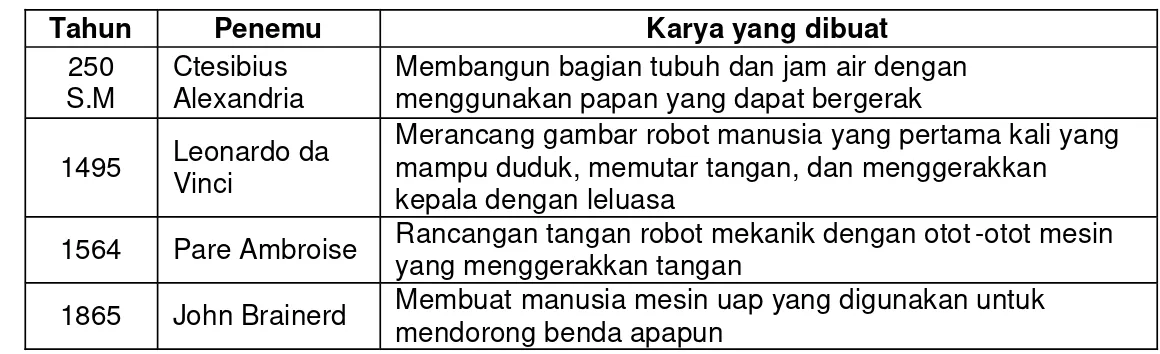
Secara singkat perkembangan teknologi lengan robot di dunia dapat dilihat
pada Tabel 1 (Jaeger, 2007):
Tabel 1. Perkembangan lengan robot di dunia.
Tahun Penemu Karya yang dibuat
250 S.M
Ctesibius Alexandria
Membangun bagian tubuh dan jam air dengan menggunakan papan yang dapat bergerak
1495 Leonardo da Vinci
Merancang gambar robot manusia yang pertama kali yang mampu duduk, memutar tangan, dan menggerakkan kepala dengan leluasa
1564 Pare Ambroise Rancangan tangan robot mekanik dengan otot -otot mesin yang menggerakkan tangan
1885 Frank Reade Jr
Membuat manusia listrik yang merupakan pengembangan dari manusia mesin uap yang telah dibuat sebelumnya
1937/38 Westinghouse
Membuat robot bernama ELEKTRO, ini merupakan ro bot dengan bentuk menyerupai manusia yang dapat berbicara, berjalan dan merokok
1942
Willard Pollard dan Harold Roselund
Merancang lengan mekanik untuk menyemprot cat secara terprogram
1951 Raymond Goertz
Merancang lengan robot yang dapat dikendalikan me lalui transmisi radio
1961
Perusahaan General Motors
Mengembangkan dan memakai teknologi lengan robot bernama UNIMATE
1963
Rumah sakit Rancho Los Amigos
Pembuatan lengan robot dengan nama Rancho Arm dimana untuk pertama kalinya Robotic Arm dapat dikendalikan melalui komputer
Membuat lengan robot yang menggunakan penggerak udara dinamakan Orm
1968 Marvin Minsky Membuat lengan robot tentakel yang memiliki kemampuan untuk dapat mengangkat manusia
1969 Victor Scheinman
Lengan robot Stanford yang sepenuhnya bergerak menggunakan listrik dan dapat dikendalikan melalui computer
1974 David Silver
Lengan robot Silver, robot ini dibuat dengan komponen terkecil dan dilengkapi dengan sensor tekanan yang mampu merasakan sentuh an
1975 Victor Scheinman
MembangunProgrammable Universal Manipulation untuk lengan robot yang dapat digunakan pada industri robot 1996 Perusahaan
mobil Honda
Robot manusia bernama P2 yang sudah memiliki kaki dan lengan yang dapat bergerak dengan baik
1997 Perusahaan mobil Honda
Robot manusia P3 yang merupakan pengembangan kedua untuk mencapai tujuan pembuatan robot ASIMO yang pintar
1997 Ilmuan dari
Salt Lake City SARCOS dengan pengendali robot secara manual
1997 Tim film The Lost World
Pembuatan kerangka pengandali (Telemetri Suit) robot dimana kerangka ini menyerupai pergerakan lengan manusia
1998 Kedokteran amerika
Membangun lengan robot bionik yang disebut dengan Edinburg Modular Arm System(EMAS)
2001 MD Robotics of Canada
Membangun lengan robot tercanggih untuk membantu pekerjaan menyiapkan stasiun ruang angkasa dengan namaSpace Station Remote Manipulator System (SSRMS) 2003 Steven Ashley Artificial Muscledibuat dari bahan polymer khusus yang
dapat berubah bentuk apabila dialiri listrik melal ui bahan ini
2007 Steven Ashley
3. METODE PENELITIAN
3.1. Tempat dan waktu penelitian
Penelitian dilakukan di Laboratorium Akustik dan Instrumentasi Kelautan
IPB. Waktu penelitian dilaksanakan secara efektif selama 4 bulan terhitung dari
bulan Desember 2008 sampai Maret 2009.
3.2. Alat bantu
3.2.1. Alat ukur dan peralatan pembuatan l engan robot
Digital Multi Meter(DMM),project board, downloader ISP, kabel serial,
Personal Computer (PC) dengan spesifikasi Prosesor Pentium III 700 MHz,
solder, gergaji U, gergaji besi, kikir dan amplas, standing bor, pinset, penggaris,
penggaris siku, mesin gerinda, mesin jigsaw, tang, dan obeng.
3.2.2. Software pembuatan lengan robot
1. BASCOM-AVR
2. AutoCAD 2004
3.3. Bahan untuk membuat lengan robot, kontroler, dan sensor
IC ATMega 8535, DT-AVR Low Cost Micro System, t rafo CT 1 ampere,
kabel pita komputer, fuse 5 ampere, pin header singgle, board sircuit,eject serial
dan pararel, fan PC 12 Volt, heat sink, IC regulator, kapasitor, dioda bridge,
saklar, arkrilik 2, 3, dan 5 mm, arkrilik siku, Parallax Standard Servo, GWS Servo
SO3T STD, GWS Servo SO4 BBM, potensio meter, batang stainles steel 5 mm,
o-ring karet,greese, resin,strach, bearing, gear, papan tic block, klem besi ukuran
3.4. Proses pembuatan lengan robot (robotic arm)
Proses pembuatan lengan ro bot dibagi menjadi beberapa tahapan yang saling
melengkapi satu sama lain. Bagian -bagian ini dapat dilihat pada Gambar 3.
Gambar 4. Tahapan pembuatan lengan robot
3.5. Unit motor servo lengan robot (robotic arm)
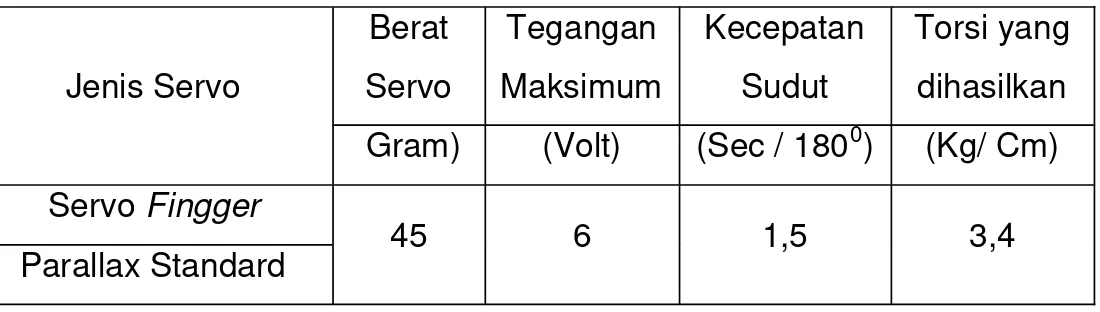
Pada lengan robot ini kita menggunakan 3 buah motor servo yang memiliki
perbedaan spesifikasinya. Servo 2 dan 3 menggunakan motor servo jenis SO3T
STD. Servo 4 dan 5 menggunakan servo ukuran besar jenis SO 4 BBM. Pada
bagian penggerakgripperkita menggunakan servo jenis Parallax Standard servo
yang memiliki bentuk hampir sama dengan SO3T STD. Semua spesifikasi motor
servo dapat dilihat pada Tabel 2, 3, dan 4. Tahap Robot (Robotic Arm)
Proses Pembuatan Robot (Robotic Arm)
Tabel 2. Spesifikasi jenis motor servofinggeryang dipakai.
Sumber : Parallax Inc, 2004
Tabel 3. Spesifikasi jenis motor servowristdanarmyang dipakai.
Jenis Servo ServoWristdanArm
48 4,8 0,33 7,2
SO3T STD
Sumber : Robot Shop, 2009
Tabel 4. Spesifikasi jenis motor servoelbowdanshoulderyang dipakai.
Jenis Servo
Shoulder 110 6 0,20 13
SO4 BBM
3.6. Unit sensor lengan robot (robotic arm)
Lengan robot yang dibuat membutuhkan sensor yang dapat mendeteksi
gerakan sendi lengan pengguna. Sensor ini dirancang sesuai dengan masukan
nilai ADC mikrokontroler sehingga dapat dengan mudah dibaca oleh IC
ATMega8535. Sumber tegangan untuk sensor diambil dari mikrokontroler
sebesar 5 Volt. Rangkaian sensor ini dapat dilihat pada Gambar 5.
Gambar 5. Rangkaian pengatur tegangan pada sensor lengan robot
3.7. Unit catu daya mikrokontroler lengan robot (robotic arm)
Mikrokontroler yang dibuat membutuhkan sumber tegangan searah yang
dihasilkan dari penyearahan arus bolak -balik listrik PLN. Proses penyearahan ini
membutuhkan rangkaian elektronik penyearah dengan tegangan keluaran 9 Volt.
Rangkaian elektronik catu daya ini dapat diliha t pada Gambar 6.
3.8. Unit catu daya motor servo lengan robot (robotic arm)
Motor servo yang digunakan memiliki tegangan kerja yang berbeda dengan
mikrokontroler sehingga dibutuhkan unit catu daya terpisah. Motor servo dapat
bekerja secara maksimal jika keluaran power supply untuk jenis Parallax dan
GWS SO3T sebesar 5 Volt sedangkan servo jenis GWS SO4 BBM sebesar 6
Volt. Rangkaian catu daya ini dapat dilihat pada G ambar 7.
Gambar 7. Rangkaian catu daya motor servo lengan robot
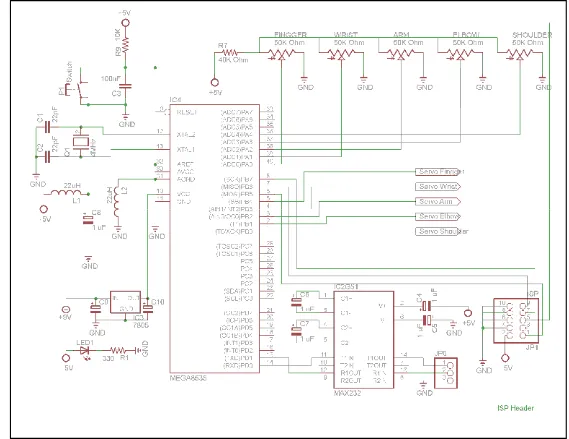
3.9. Mikrokontroler lengan robot (robotic arm)
Mikrokontroler ATMega8535 memiliki rangkaian pendukung yang
membantu kerja dari operasi program. Rangkaian sensor akan dihubungkan
dengan mikrokontroler pada Port A sedangkan untuk motor servo ada pada Port
Gambar 8. Rangkaian mikrokontroler lengan robot
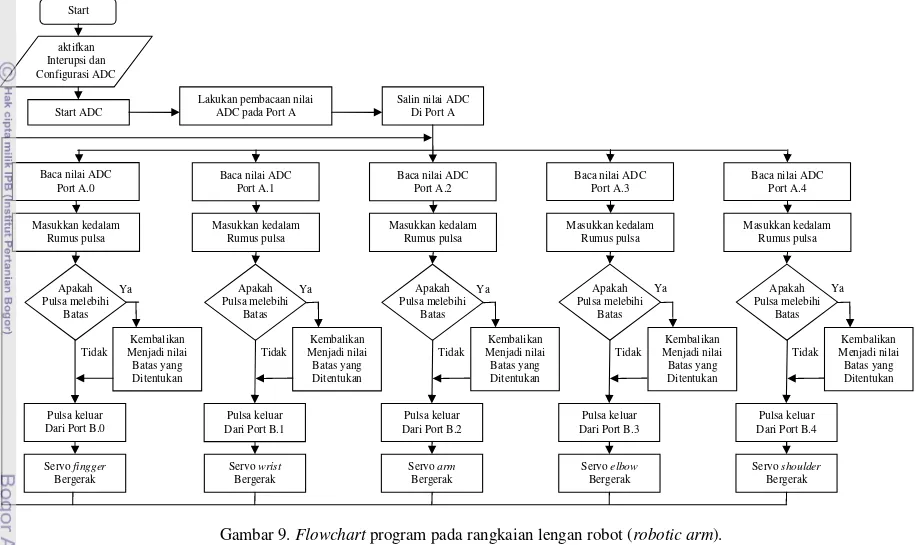
3.10. Proses berjalannya program lengan robot (robotic arm)
Tahapan kerja ini di buat dalam bentuk flowchartsebagai langkah awal dalam
pembuatan struktur program. Flowchartini dibuat untuk mengetahui apa yang
harus dikerjakan sebelum memulai merancang program. Keuntungan pengg unaan
flowchartadalah apabila terjadi kesalahan dalam pembuatan program akan lebih
mudah ditelusuri dari diagram yang dibuat sebelumnya. Flowchartprogram yang
Gambar 9.Flowchartprogram pada rangkaian lengan robot (robotic arm).
ADC pada Port A
Pada bagianflowchartprogram di atas dapat dilihat bahwa algoritma program
yang pertama kali dilakukan adalah pengaktifan fungsi fitur interupsi dan ADC.
Tanpa ada pengaktifan fitur ADC maka perhit ungan lebar pulsa tidak dapat
dilakukan. Data yang telah disalin pada Port A akan dilakukan perhitungan sesuai
dengan rumus yang ditentukan untuk lebar pulsa. Besaran lebar pulsa yang keluar
kita tentukan dengan menentukan rumus awal didalam program mik rokontroler.
3.11. Pengujian lengan robot (robotic arm)
Pengujian dilakukan di Laboratorium Akustik dan Instrumentasi Kelautan
IPB. Pengujian yang dilakukan berada di luar air untuk mengetes apakah bagian
tangan robot dapat bergerak kesemua sudut yang diinginkan dan mampu menjepit
benda dengan baik.
3.11.1. Pengujian sensor lengan robot (robotic arm)
Pengujian dilakukan dengan mengukur keluaran tegangan yang ada pada kaki
2 sensor menggunakanDigital Multi Meter. Hasil pengujian akan dicatat pada
Tabel 5.
Tabel 5. Hasil pengukuran tegangan yang dikeluarkan sensor pada sudut maksimum dan minimum. Pada Kaki 2 Sensor
(mili Volt)
SensorWrist Max 120
Min 0
3
SensorArm Max 122
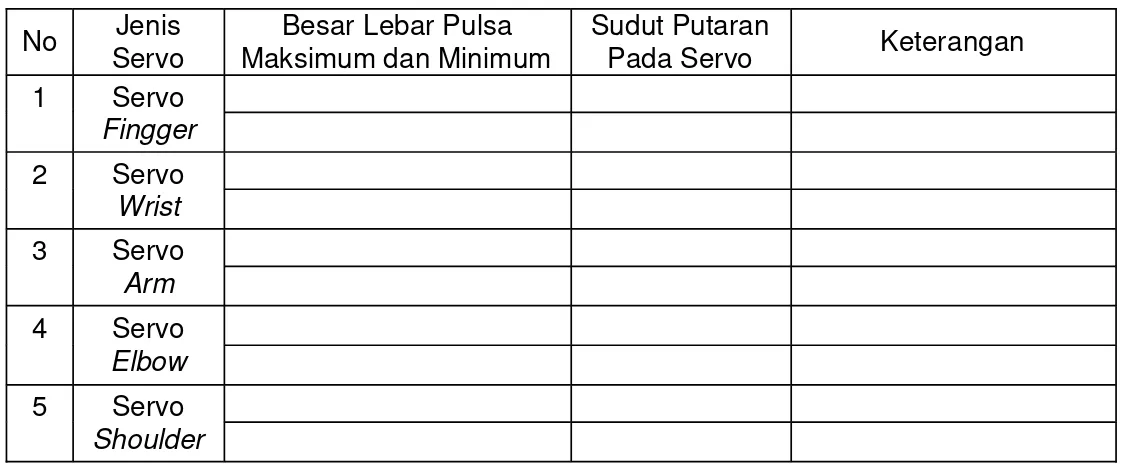
3.11.2. Pengujian besar sudut servo dengan perbedaan lebar pulsa
Motor servo yang digunakan memiliki batas lebar pulsa untuk melakukan
gerakan memutar dengan sudut tertentu. Mengetahui lebar pulsa ini maka kita
dapat menyesuaikan lebar pulsa maksimum dan minimum dengan sintak program
yang dibuat. Cara ini untuk mencegah kerusakan gearmotor servo pada
beroperasi . Hasil dari pengukuran ini dicatat pada Tabel 6.
Tabel 6. Hasil pengukuran lebar pulsa dan sudut yang dapat dibuat.
No Jenis
3.11.3. Pengujian daya cengkramgripperlengan robot (robotic arm)
Pengujian dilakukan dengan mencoba mengambil sepuluh obyek benda
dengan ukuran dan bobot yang berbeda menggunakan gripperlengan robot. Hasil
pengamatan dicatat pada Tabel 7.
4. HASIL DAN PEMBAHASAN
4.1. Hasil rangkaian lengan robot (robotic arm)
Lengan robot yang dibuat penulis diberi nama RAMCES -5 singkatan dari
Robotic Arm with Manual Control sErvoS –5. Pengujian di Laboratorium
Akustik dan Ilmu Kelautan IPB menunjukkan RAMCES -5 dapat bekerja dengan
baik saat mengambil obyek yang berbeda. Pergerakan menjepit dan
memindahkan obyek dapat dilakukan dengan baik dan terarah. Respon dari
RAMCES-5 terhadap pergerakan sensor tangan terjadi sangat cepat dan tidak
mengalami hambatan.
Lengan robot ini memiliki beberap a keunggulan diantaranya: mampu
mengambil berbagai macam benda dengan batas ukuran dan berat tertentu,
mampu melakukan gerakan seperti manusia, dan pengendali robot menggunakan
sensor yang ada pada tangan manusia. Pengendalian yang dilakukan
menggunakan tangan akan memberi kemudahan dalam mengarahkan gerakan
RAMCES-5 sesuai gerakan tangan.
Alat khusus yang ditempatkan pada RAMCES -5 adalahgripperyang berguna
dalam mencengkram benda yang diinginkan. Bentuk gripper yang dipilih
menyerupai capit karena bentuk ini mudah untuk dibuat dan memiliki gerakan
yang serempak antara kedua bagian capit. Sepasang capit akan memberikan hasil
cengkraman yang seimbang pada obyek yang diambil. Bentuk seperti capit
mempermudah RAMCES-5 mencengkram obyek secara baik saat kondisi vertikal.
Gambar 10. Tampak samping desain RAMCES -5
4.2. Desain pelindung motor servo RAMCES -5 4.2.1. Desain motor servofingger
Desain motor servofingger (servo 1) memiliki bagian yang berbeda dengan
servo lainnya karena memiliki gripperyang menempel dibagian atas pelindung
servo 1. Gripperini berguna untuk mencengkram obyek yang diinginkan. Skala
untuk ukuran desain ini dipakai satuan mili meter (mm). Lebar bukaan yang
mampu dilakukangripperadalah sebesar 5,6 cm. Hal ini membuat RAMCES -5
hanya mampu mencengkram obyek dengan ukuran dibawah 5,6 mm. Desain dari
servo 1 ditampilkan pada Gambar 11a,b sedangkan desain gripperditampilkan
(a) (b)
Gambar 11. (a). Tampak atas desain pelindung motor servo 1, (b). Tampak depan desain pelindung motor servo 1
Gambar 12. Tampak atas desain gripperdari servo 1
Satuan= mili meter Satuan= mili meter
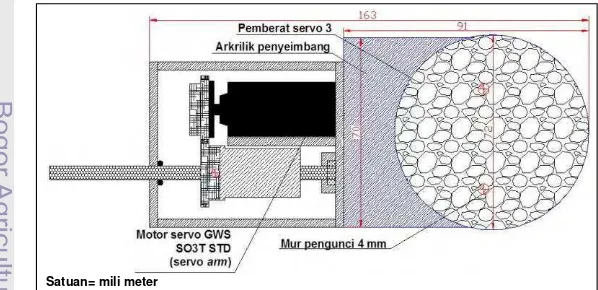
4.2.2. Desain motor servowristdanarm
Motor servowrist(servo 2) danarm(servo 3) memiliki desain pelindung
servo yang hampir sama dengan servo 1 hanya saja tidak memiliki perangkat
tambahan sepertigripper. Desain dari servo 2 dan 3 ditampilkan pada Gambar
13a,b.
(a) (b)
Gambar 13. (a). Tampak atas desain motor servo 2 dan 3, (b). Tampak depan desain motor servo 2 dan 3
4.2.3. Desain motor servoelbow
Desain pelindung servoelbow(servo 4) memiliki bentuk yang lebih panjang
dari servo lainnya. Dengan ukuran yang penjang maka servo ini akan membantu
servo didepannya lebih mudah menjangkau obyek -obyek yang jauh. Desain
panjang dipilih untuk menyamakan bagian ini dengan fungsi lengan ma nusia. Hal
ini akan membuat RAMCES -5 lebih mudah dikendalikan dan identik dengan
gerakan lengan manusia. Desain dari servo 4 ditampilkan pada Gambar 14a,b dan
Gambar 15.
(a) (b)
Gambar 14. (a). Tampak depan desain pelindung motor servo 4, (b). Tampak samping desain pelindung motor servo 4
Gambar 15. Tampak atas desain pelindung motor servo 4
4.2.4. Desain motor servoshoulder
Desain servoshoulder(servo 5) dirancang lebih ko koh dan besar dari pada
servo yang lain agar mampu menahan beban berat lebih besar. Desain dari servo
5 ditampilkan pada Gambar 1 6 dan 17.
Gambar 16. Tampak atas desain motor servo 5
Gambar 17. Tampak depan desain motor servo 5
Bentuk servo 5 seperti kotak dengan bagian bawah terpotong sebagian
berfungsi sebagai tempat menaruh RAMCES -5 pada dudukan wahana tetap atau
mobile yang membawanya. Khusus untuk servo 5 dipasangkan 2 buah bearing
pada poros perputaran stainles steel agar mengurangi b esarnya gesekan saat
berputar. Arkrilik yang tebal digunakan agar servo 5 mampu menahan bobot
RAMCES-5 secara keseluruhan dengan baik. Gear penghubung yang lebih besar
digunakan pada servo 5 karena bobot keseluruhan dari RAMCES -5 bertumpu
pada bagian servo ini sehingga dibutuhkan daya cengkram yang tinggi saat
berputar. Pemasangan keduagearini harus diposisikan sedikit longgar agar saat
berputar tidak macet dan mengganggu pergerakan RAMCES -5.
4.2.5. Desain persambungan sendi RAMCES -5
Desain cekungan ini dibuat untuk memberikan kekuatan persambungan sendi
servo sehingga tidak terjadi pergeseran saat servo bekerja. Dengan memberikan
cekungan selain memberi kekuatan persambungan sekaligus mengurangi jeda
yang terjadi saat servo bergerak. Desain persambungan sendi RAMCES -5
ditampilkan pada Gambar 18.
Gambar 18. tampak samping desain persambungan sendi RAMCES -5
4.3. Desain beban penyeimbang motor servo RAMCES -5 4.3.1. Desain penyeimbang servo 1
Pada RAMCES-5 dipakai banyak bahan arkrilik untuk pelindung servo
sehingga menimbulkan berat pada bagian servo penopangnya. Untuk mengurangi
beban yang diterima oleh servo saat berputar maka diberikan beban penyeimbang.
Desain penyeimbang untuk servo 1 tidak digunakan beban tambahan melainkan
menggunakan bobot servo ini sendiri. Hal ini akan mengurangi bobot total
dibagian servo selanjutnya. Desain penyeimbang servo 1 ditampilkan pada
Gambar 19.
Gambar 19. Tampak samping desain penyeimb ang servo 1
Dengan desain ini maka torsi putaran pada servo 2 tidak mengalami
pengurangan sehingga mampu memberikan memutar yang baik. Letak posisi dari
poros servo 2 berada dekat dengan sumbu horizontal gripperagar gerakan
memutar servo 2 tidak mempengaruhi posisi cengkraman gripper. Bentuk
sebenarnya dari desain penyeimbang servo 1 ditampilkan pada Gambar 20.
Gambar 20. Tampak samping bentuk jadi penyeimbang servo 1
Bagian dalam servo diberikan pencahayaan ya ng cukup dari nyala lampu
LED. Cahaya LED selain berguna menerangi bagian dalam servo juga berfungsi
sebagai indikator motor servo sedang bekerja. Saat motor servo bergerak maka
lampu LED akan berkedip dengan cepat yang menandakan sedang menerima
sinyal pulsa dari mikrokontroler. Dengan terlihatnya bagian dalam servo maka
dapat dengan mudah memantau pergerakan gearpenghubung servo.
4.3.2. Desain penyeimbang servo 2
Desain penyeimbang servo 2 berbeda dengan penyeimbang servo 1 agar
didapatkan bobot seimbang dari servo 1 dan 2. Berat yang ada pada servo 1 dan 2
akan diseimbangkan dengan beban penyeimbang yang terletak berlawanan dari
servo ini. Hal ini akan membantu perputaran servo 3 dan menambah torsi yang
dihasilkan. Beban penyeimbang ini te rbuat dari timah padat yang telah dibentuk
seperti tabung. Desain penyeimbang servo 2 ditampilkan pada Gambar 21
sedangkan Gambar 22 menampilkan bentuk sebenarnya penyeimbang servo 2.
Gambar 21. Tampak samping desain penyeim bang servo 2.
Gambar 22. Tampak samping bentuk jadi penyeimbang servo 1
4.3.3. Desain penyeimbang servo 3
Desain penyeimbang pada servo 3 berbeda dengan penyeimbang servo 1 dan
2 karena perbedaan fungsi beban ini. Beba n penyeimbang servo 3 tidak akan
berpengaruh banyak saat posisi servo 4 tepat pada posisi vertikal. Saat servo 4
bergerak dari posisi vertikalnya maka penyeimbang servo 3 akan membantu
gerakan memutar servo 4. Desain penyeimbang servo 3 ditampilkan pada
Gambar 23 sedangkan bentuk sebenarnya ditampilkan pada Gambar 24
Gambar 23. Tampak belakang desain penyeimbang servo 3
Gambar 24. Tampak depan bentuk jadi penyeimbang servo 3
4.3.4. Desain penyeimbang servo 4
Bagian servo 4 merupakan servo terakhir yang diberi beban penyeimbang
sedangkan bagian servo 5 akan menempel pada wahana yang membawa
RAMCES-5. Pada bagian servo 4 memiliki desain beban penyeimbang yang
lebih besar dibandingkan dengan servo yang lainnya karena servo ini berperan
utama menyeimbangkan seluruh bobot servo didepannya (sevo 1,2, dan 3).
Desain penyeimbang servo 4 ditampilkan pada Gambar 25 sedangkan Gambar 26
menampilkan bentuk sebenarnya penyeimbang servo 4.
Gambar 25. Tampak samping desain penyeimbang servo 4
Gambar 26. Tampak samping bentuk jadi penyeimbang servo 4
Letak dari beban penyeimbang yang miring berguna untuk mendapatkan titik
grafitasi yang berubah-ubah saat bergerak karena RAMCES -5 memiliki
kemampuan menjauh dan mendekatkan posisi servo 2. Hal ini disebabkan karena
RAMCES-5 memiliki servo 3 yang berperan sebagai sendi engsel tangan
manusia. Dengan menjauhnya posisi servo 2 maka bobot yang dite rima servo 5
akan bertambah. Pada saat inilah penyeimbang servo 4 melakukan fungsinya
yaitu mengurangi gaya grafitasi yang diterima servo 1,2,3 sehingga membantu
pergerakan servo 5 dalam memutar. Bentuk lengkap dan bagian -bagian
RAMCES-5 dapat dilihat pada Lampiran 9.
4.4. Desain sensor pengendali RAMCES -5 4.4.1. Desain sensor fingger
Lengan robot ini dilengkapi dengan 5 buah sensor pada tangan yang berfungsi
menjadi pengendali gerakan robot. Untuk mengendalikan gerakan servo fingger
diperlukan sensorfingger. Sensorfinggerkita buat daricassingyang mampu
manusia dengan cara tertentu kita buat agar sensor dapat bergerak mengikuti
gerakan jemari tangan. Sensor yang dibuat harus dapat dipasang dan dilepaskan
dengan mudah dari jari manusia. Bentuk sensor finggersecara lengkap
ditampilkan pada Gambar 27.
Gambar 27. Tampak bawah sensor fingger
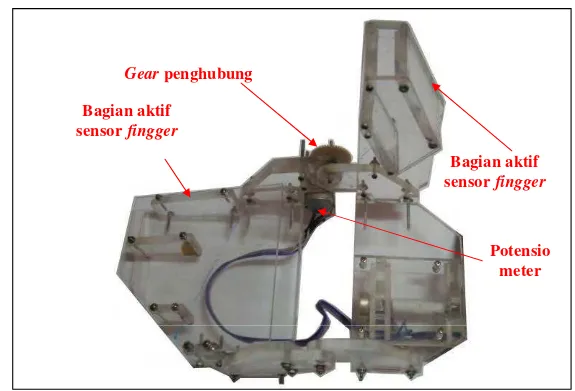
4.4.2. Desain sensor wrist
Sensorwristmerupakan yang paling rumit dari segi desain dibandingkan
dengan sensor lainnya. Hal ini disebabkan oleh bentuk sendi putar pergelangan
tangan yang memiliki poros putar di bagian tengah tulang sehingga membutuhkan
mekanisme khusus untuk mendeteksi gerakan putar sendi ini . Sensor terpasang
menempel dengan kuat pada bagian pergelangan tangan manusia sehingga saat
sendi berputar sensor tidak ikut bergerak. Bentuk sensor wristditampilkan pada
Gambar 28 dan 29.
Potensio meter
Gearpenghubung
Bagian aktif sensorfingger
Gambar 28. Tampak bawah sensor wrist
Gambar 29. Tampak atas sensor wrist
4.4.3. Desain sensor arm
Sensorarmdiletakkan pada bagian sendi engsel tangan manusia. Sendi
engsel ini memiliki sumbu putar di luar sendi sehingga mudah untuk membuat
desain sensorarm. Sensorarmakan mendeteksi secar langsung gerakan naik
turunnya tangan manusia. Untuk menjaga agar sensor ini tidak bergerak kekanan
Potensio
meter Poros sensor Bagian pasif
sensorwrist Poros penggerak
sensor Bagian aktif sensor
wrist
Bagian pasif sensor wrist Bagian aktif
sensorwrist
dan kekiri maka bagian aktif sensor dihubungkan dengan bagian pasif sensor
wrist. Potensio meter untuk sensor armdipasangkan di sebelah luar ba dan sensor.
Bentuk sensorarmditampilkan pada Gambar 30 dan 31.
Gambar 30. Tampak bawah sensor arm
Gambar 31. Tampak samping kanan sensor arm
4.4.4. Desain sensor elbow
Sensorelbowmerupakan sensor yang dirancang untuk dapat mendeteksi
pergerakan putar lengan manusia. Lengan manusia memiliki sumbu putar yang
Potensio meter Gearpenghubung
Bagian aktif sensorarm
Bagian pasif sensorarm
Gearpenghubung
Bagian aktif sensorarm
Bagian pasif sensorarm
berada didalam tulang sehingga dibutuhkan desain seperti tabung agar mampu
menghitung besarnya sudut yang dibentuk. Desain seperti tabung dipilih karena
untuk bagian lengan tidak dimungkinkan penggunaan sistem sensor wristatau
sensor yang lain
Bentuk yang seperti tabung akan membuat sensor elbowbergerak serupa
dengan lengan manusia. Bentuk tabung ini membuat sensor elbowlebih ringkas
dan terlindung. Untuk menguatkan dudukan sensorelbowmaka bagian aktif
sensor direkatkan dengan bagian pasif sensor armsedangkan bagian pasif akan
direkatkan pada bagian aktif sensor shoulder. Sensorelbowdiberi penguat
tambahan berupa dua buah perekat kain yang berada di bagian akti f dan pasif
sensor. Bentuk sensorelbowditampilkan pada Gambar 32.
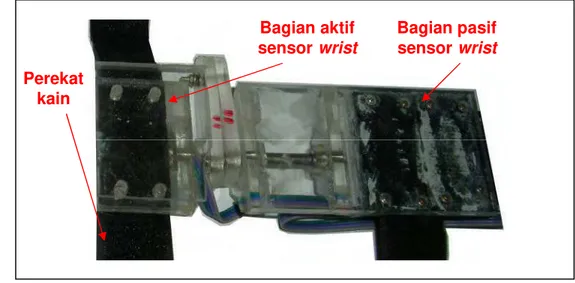
4.4.5. Desain sensor shoulder
Desain sensorshoulderharus memenuhi kriteria seperti sensor arm
sedangkan bahu manusia merupa kan bagian tangan yang memiliki sendi omni
(berputar kesegala arah). Khusus untuk sensor shoulderdipakai desain dengan
sistem yang berbeda dengan sensor lainnya. Hal ini disebabkan karena sendi bahu
yang semula memiliki banyak sudut putar harus dijadika n menjadi satu sendi
engsel. Bentuk sensorshoulderditampilkan pada Gambar 33.
Gambar 33. Tampak depan sensor shoulder
Bagian pasif sensorshouldermerupakan tempat bertumpunya semua beban
sensorshoulder. Untuk mencegah bergesernya sensor maka bagian aktif sensor
shoulderdipasangkan dua buah perekat kain. Perekat kain ini selain untuk
menguattkan sensorshoulderjuga sebagai tempat merekatnya bagian pasif sensor
elbow. Bentuk seluruh sensor RAMCES -5 ditampilkan pada Lampiran 10 d an
sensor yang telah terpasang di tangan ditampilkan pada Lampiran 11.
4.5. Rangkaian kontroler RAMCES -5
Rangkaian kontroler RAMCES -5 terdiri dari tiga bagian penting, yaitu:
bagian trafo, regulator, dan mikrokontroler. Bagian trafo dipasangkan s ejajar dan
berpasangan sehingga panas yang dihasilkan dapat terbuang dengan baik. Untuk
menurunkan tegangan yang dihasilkan trafo digunakan regulator yang dilengkapi
denganheat sinksebagai pembuang panas. Karakteristik regulator yang dipakai
ditampilkan pada Lampiran 12. Bagian mikrokontroler diletakkan berdekatan
dengan kipas kecil agar tidak terkena panas dari trafo dan regulator. Untuk
mengurangi panas yang ada didalam kotak maka dipasangkan kipas pendingin
pada bagian sisi depan kontroler. Soket kabel sensor dan servo dijadikan tempat
persambungan kabel motor servo dan sensor RAMCES. Bentuk kontroler
RAMCES-5 ditampilkan pada Gambar 34.
Gambar 34. Tampak atas kontroler RAMCES -5 beserta bagian-bagiannya,
4.6. Hasil perhitungan perangkat keras RAMCES -5 4.6.1. Tegangan keluaran sensor RAMCES -5
Sensor RAMCES-5 memiliki 3 buah kaki berbeda yaitu kaki 1,2, dan 3.
Sensor ini terpisah satu sama lainnya sehingga dapat bergerak bebas dan memiliki
sudut putar yang berbeda. Hasil uji pengukuran tegangan keluaran sensor
ditampilkan pada Tabel 8.
Tabel 8. Hasil pengukuran tegangan yang dikeluarkan sensor pada sudut maksimum dan minimum. Pada Kaki 2 Sensor
(mili Volt)
Max 100 1288 350 Membuka
Min 0 950 Menutup
2 Sensor Wrist
Max 120 1288 298 Berputar
Min 0 920 Normal
3 Sensor Arm
Max 122 1288 83 Menekuk
Min 0 676 Lurus
4 Sensor Elbow
Max 120 1288 230 Menekuk kedada
Min 0 700 Membuka
5 Sensor Shoulder
Max 90 1288 260 Mengangkat
Min 0 1030 Normal
Data ini menunjukkan bahwa tegangan maksimum untuk kaki 1 sa at kondisi
maksimum dan minimum sebesar 1288 mili Volt. Tegangan input semua sensor
memiliki nilai yang sama karena tegangan semua masukan potensi meter
dihubungkan secara pararel. Rangkaian pararel ini akan membuat arus yang
masuk untuk setiap kaki 3 ak an dibagi menjadi 5 bagian sehingga tidak perlu
memakai banyak resistor dan kabel untuk sensor.
Jika melihat keluaran kaki 2 sensor saat kondisi sudut maksimum maka
tegangan terbesar ada pada sensor fingger dengan nilai sebesar 350 mili Volt.
Nilai terendah ada pada sensor armdengan nilai sebesar 83 mili Volt. Hal ini
dengan sensorarm. Tegangan terendah saat sudut minimum terdapat pada sensor
armdengan nilai 676 mili Volt sedangkan yang terbesar ada pada sensor shoulder
sebesar 1030 mili Volt. Keluaran tegangan terendah ini disebabkan oleh desain
gear penghubung pada sensor shoulderyang mampu menghasilkan putaran lebih
banyak dibandingkan sensor yang lain.
Semua hasil pengukuran tegangan kaki 2 tidak ada nilai yang melebihi batas
maksimum Vref. Budiharto (2008) menjelaskan bahwa tegangan referensi
internal sebesar 2,56 Volt. Tegangan yang dipakai pada sensor RAMCES -5
kurang dari 2,56 sehingga kita yakin dapat menggunakan tegangan keluaran
sensor sebagai input dari ADC tanpa resiko terjadi kerusakan.
4.6.2. Besar sudut servo RAMCES -5 dengan perbedaan lebar pulsa
Setiap servo RAMCES-5 memiliki batas lebar pulsa untuk melakukan
gerakan memutar dengan sudut tertentu. Lebar pulsa yang diberikan tidak boleh
melebihi apa yang sudah ditentukan dari pabrik pembuatnya. Untuk mendapatkan
lebar pulsa maksimum dan minimum pada program maka kita lakukan
pengukuran saat motor servo RAMCES -5 terpasang. Hasil dari pengukuran lebar
pulsa maksimum dan sudut yang dibentuk diperoleh Tabel 9.
Tabel 9. Hasil pengukuran lebar pulsa dan sudut yang dapat dibuat.
No Jenis
550 0 Keadaan tertutup
1350 67 Keadaan terbuka
2 Servo
Wrist
450 90 Memutar kekanan
1500 0 Normal
3
ServoArm 600 0 Normal
2000 120 Mengangkat
4 Servo
Elbow
800 0 Berputar kekiri
2300 160 Berputar kekanan
5 Servo
Shoulder
600 100 Mengangkat
Data ini menunjukkan bahwa semua karakteristik gerakan servo berbeda satu
sama lainnya. Lebar pulsa yang berbeda untuk setiap servo karena disesuaikan
dengan bentuk dan besarnya pergerakan RAMCES -5. Hal ini disebabkan karena
perbedaan jenis servo yang dipakai pada RAMCES -5.
Hasil perhitungan lebar pulsa yang diberikan terhadap besar sudut putar
memperlihatkan terdapat perbedaan antara servo armdan servoshoulderdimana
nilainya berkebalikan saat melakukan gerakan men gangkat. Untuk servo arm
membutuhkan lebar pulsa maksimum untuk mengangkat sedangkan servo
shouldermembutuhkan lebar pulsa minimum. Hal ini terjadi karena posisi motor
servo yang tidak sama sehingga membutuhkan lebar pulsa yang berbeda.
4.6.3. Daya cengkramgripper.
Pengujian daya cengkram gripperRAMCES-5 hanya dilakukan sebanyak
sepuluh kali dengan obyek yang berbeda. Pengulangan pengambilan obyek
sebanyak tiga kali lalu diambil kesimpulan hasil pengamatannya. Hasil dari
pengujian ini ditampilkan pada Tabel 10.
Tabel 10. Hasil pengujian daya cengkram gripperpada berbagai macam bentuk obyek.
2 Kotak arkrilik 10 x 4,3 x 10,3 61,7 Licin Agak bergeser 3 Kotak putih 6,5 x 5 x 4 126,3 Kasar Butuh torsi besar
4 Kotak baterai 10 x 5 x 3,2 84,5 Kasar Baik
5 Spidol 14 x 1 6 Licin Baik
6 Silinder besi 6,2 x 3 57,4 Kasar Baik
7 Silinder besi padat 3,5 x 4 168,7 Kasar Butuh torsi besar
8 Tabung obat 10,5 x 2,2 17,7 Kasar Baik
9 Obeng besar 4,5 x 3 60,9 Bergelombang Sedikit goyang
10 Obeng sedang 8,5 x 2 29,3 kasar Baik
Data ini kita dapat melihat bahwa gripperakan mengalami kegagalan dalam
pencengkraman obyek apabila permukaan obyek licin dan bobotnya cukup besar.
Dengan permukaan obyek yang licin akan mengurangi daya cengkram gripper.
Saatgrippermencengkram kotak arkrilik terjadi pergeseran posisi cengkraman
saat diangkat. Pergeseran yang terjadi tidak sampai membuat benda yang
dicengkram jatuh karena permukaan gripperdilengkapi dengan bantalan karet.
Bantalan karet ternyata mampu menambah grip pada saat menjepit obyek. Tanpa
adanya bantalan karet kemungkinan kotak arkrilik yang licin akan langsung jatuh.
Keadaangrippersaat membuka dan menutup capit ditampilkan pada
Lampiran 13.
4.7. Perangkat lunak pengendali RAMCES -5
Pembuatan perangkat lunak berupa program kendali gerak mikrokontroler
menggunakansoftwareBASCOM-AVR dengan bahasa BASIC. Program yang
telah dibuat akan didownload kedalam mikrokontroler menggunakan downlo ader
ISP. Program ini akan mengukur besaran tegangan dari sensor lalu akan
memberikan respon berupa lebar pulsa yang berbeda kepada motor servo.
Kualitas penerimaan data dari sensor ke dala m mikrokontroler secara umum
berjalan cukup baik. Hal ini ditunjukkan reaksi gerak motor servo yang sesuai
dengan arah gerak sensor. Sintaksis (perintah) yang ada didalam program ini
ditampilkan pada Lampiran 14.
RAMCES-5 memiliki prinsip kerja ro bot sama dengan seperti robot buatan
Victor Scheinman tahun 1969 yang dikendalikan menggunakan komputer.
Lengan robot RAMCES-5 dikendalikan menggunakan prinsip pengendalian yang
pengendalian robot ini sama seperti metode yang digunakan oleh ilmuan Salt Lake
City dan tim peraga filmThe Lost World tahun 1997 yang menggunakan bagian
tubuh manusia untuk mengendalikan robot.
RAMCES-5 merupakan robot tangan yang memiliki level pergerakan
sebanyak 5 buah (5Degree Of Freedom). Level pergerakan ini yang
memudahkan gerakan RAMCES -5 dalam mengambil obyek benda yang terletak
secara horizontal atau vertikal. Pitowarno (2006) menjelaskan gerakan holomonic
merupakan sistem gerak yang serupa dengan gerak ujung pensil atau pulpen ke
segala arah di permukaan kertas sesuai dengan keinginan. Dengan Degree Of
Freedom(DOF) sebanyak 5 buah membuat RAMCES -5 dapat bergerak dan
menjangkau ke segala arah tanpa ada halangan. Hal ini sama dengan gerakan
holomonic pada sebuah pensil di atas kertas.
RAMCES-5 dapat bergerak kesegala arah dirancang agar mampu mengikuti
gerakan tangan manusia yang dapat menjangkau ke semua sudut dimensi.
Kelebihan ini membuat RAMCES -5 bergerak sesuai dengan kemauan kita dengan
perantara sensor yang terpasang pada tangan manusia. Penggunaan motor servo
sebagai alat penggerak memberikan hasil gerakan yang halus dan memiliki sudut
yang sama dengan tangan manusia.
5.1. Kesimpulan
Hasil dari penelitian ini menunjukkan bahwa RAMCES -5 dapat berputar
dengan baik dan mampu mengangkat berbagai macam obyek benda. Gripper
pada RAMCES-5 hanya dapat mencengkram obyek yang memiliki ukuran
kurang dari 5,5 cm. Hasil pengamatan struk tur RAMCES-5 menunjukkan bahwa
penggunaan bahan arkrilik 5 mm yang didukung dengan penggunaan mur 2 mm
dan arkrilik siku mampu menopang berat RAMCES -5 dengan baik.
Penggunaan mikrokontroler ATMega8535 dengan fasilitas ADC 8 buah dan
pencacahan 10 bit dapat berjalan dengan baik mengontrol gerakan RAMCES -5.
Penggunaan pemberat penyeimbang bisa mengurangi pengaruh gravitasi bumi
pada RAMCES-5 sehingga dapat bergerak lebih bertenaga mengangkat benda
yang diinginkan dengan batasan berat sebesar +/ - 170 gram.
5.2. Saran
Penelitian selanjutnya mengenai lengan robot sebaiknya gunakan model servo
dan desain yang lebih ramping lagi untuk mengurangi beban keseluruhan lengan
robot. Gunakan penghalus tegangan DC yang lebih baik dalam rangkaian power
supply untuk mengurangi getaran pada motor servo. Desain sensor wristdan
elbowharus lebih baik lagi agar mendapatkan mendeteksi gerakan memutar
DAFTAR PUSTAKA
Active Robots. 2009. Lynxmotion Robot Arms -Lynx5.
www.active-robots.com/products/robots/lynx5 -details.shtml [Diakses tanggal 1 April 2009]
Alberts, M. 2008. BASCOM AVR
http://avrhelp.mcselec.com/ [Diakses tanggal 2 April 2009]
Ashley, S. 2003. Artificial Muscles. Scientific American
http:// www.gearlog.com/images/ Scientific American/Article/Oct-03,Artificial Muscle. pdf [Diakses tanggal 10 September 2007]
ATMEL. 2003. 8-bit AVR Microcontroller With 8K Bytes in -System Programmable Flash. http://www.atmel.com/ [Diakses tanggal 10 September 2007]
Budiharto, W. 2005. Perancangan Sistem dan Aplikasi Mikrokontroler. PT. Elex Media Komputindo. Jakarta.
Budiharto, W. 2006. Belajar Sendiri Membuat Robot Cerdas. PT. Elex Media Komputindo. Jakarta.
Budiharto, W. 2008. Panduan Praktikum Mikrokontroler AVR ATMega16. PT. Elex Media Komputinda. Jakarta.
Budiharto, W. Sistem alarm kebakaran dengan sensor suhu dan asap berbasis mikrokontroler AVR 8535.
http://www.toko-elektronika.com/tutorial/alarm.htm [Diakses tanggal 1 April 2009]
Cook, G. F. 1999. Pulse Width Modulator for 12 and 24 Volt appli cations. Artikel dalam Home Power Magazine.
Duclin, U. 2008. Dasar Pulse Width Modulation (PWM) .
http://awasnyetrum.blogspot.com/2008/08/dasarpulse -width-modulation-pwm.html [Diakses tanggal 23 April 2009]
Etisystems. Single Turn Potentiometer Design Guide
http://www.etisystems.com/singledesign.asp [Diakses tanggal 23 April 2009]
Iklanmax. 2009. Atmega8535-16PU.
http://elektronik.iklanmax.com/2009/02/03/atmega8535 -16pu.html [Diakses tanggal 23 April 2009]
Innovative Electronics. 2007. DT -AVR Low Cost Micro System.
http://www.innovativeelectronics.com/innovative_electronics/pro_dtavrlc m.htm [Diakses tanggal 3 April 2009]
Jaeger. History of Robotics
http://72.14.235.104/search?q=cache:fcc16uVYjuwJ:pages.cpsc.ucalgary. c a/~jaeger/visualMedia/robotHistory.html+robotic+arm+history&hl=id&ct =clnk&cd=6&gl=id [Diakses tanggal 10 September 2007]
Malik, I. 2007. Microcontroller and robotics: Mengontrol Motor Servo.
http://microrobotics.blogspot.com/search/label/Mengontrol%20Motor%20 Servo [Diakses tanggal 2 April 2009]
Parallax Inc. 2004. Standard Servo (#900-00005).
http://www.digikey.com/scripts/DkSearch/dksus.dll?Detail&name=900 -00005-ND [Diakses tanggal 4 April 2009]
Pitowarno, E. 2006. ROBOTIKA: Desain, Kont rol, dan Kecerdasan Buatan. CV. ANDI. Yogyakarta.
Proakis, J. G. dan Manolakis, D. G. 1995. DIGITAL SIGNAL PROCESSING. Diterjemahkan oleh Drs. Rudy P, Gultom M. T, Dra. Nunik Nurida, Ir. Yohannes Dewanto M. T. PT. Prehallindo. Jakarta.
RIZKALINDO. 2008. Mikrokontroler ATMega 8535
http://rizkalindo.blogspot.com/2008/03/mikrokontroler -atmega8535.html [Diakses tanggal 3 April 2009]
Robot Shop. 2009. GWS Standard SO3T STD Servo Motor
http://www.robotshop.us/home/products/robot -parts/motors/servo-motors/gws-servo-en/gws-standard-s03t-std-servo-motor.html [Diakses tanggal 4 April 2009]
Servo Hunt. 2009. GWS Heavy Duty Servo: SO4 BBM.
http://www.servohut.com/A%20A%20front%20page%20so4%20servo.ht m [Diakses tanggal 4 April 2009]
Suplee, C. 1997. Robot Revolution. National Geographic. New York.
Wahyudin, D. 2007. Belajar mudah AT89S 52 dengan Bahasa Basic Menggunakan BASCOM-8051. C.V. Andi Offset. Yogyakarta
Lampiran 1.Referensi capit untuk RAMCES-5
Sumber : Active Robots (2009)
Struktur Lengan Robot dari Lynxmotion Robot Arms-Lynx5
Sumber : Active Robots (2009)
Lampiran 2.Bentuk mikrokontroler dan IC ATMega8535
Sumber : Iklanmax (2009)
Lampiran 4. BentukboardDT-AVR Low Cost Micro System
Sumber : Innovative Electronics (2007)
Tampak atas DT-AVR Low Cost Micro System
Sumber : Innovative Electronics (2007)