PROPOSAL PROGRAM
PROPOSAL PROGRAM KREATIVITAS MAHASISWAKREATIVITAS MAHASISWA JUDUL PROGRAM
JUDUL PROGRAM METODE KONTROL
METODE KONTROL HYBRID HYBRIDPADA ROBOT INDUSTRIPADA ROBOT INDUSTRI KONFIGURASI DELTA KONFIGURASI DELTA BIDANG KEGIATAN: BIDANG KEGIATAN: PKM-ARTIKEL ILMIAH PKM-ARTIKEL ILMIAH Diusulkan Oleh: Diusulkan Oleh: MUHAMMAD
MUHAMMAD FIKKO FADFIKKO FADJRIMIRATNJRIMIRATNO O (21060112110046/A(21060112110046/Angkatan ngkatan 2012)2012) ROFIQ
ROFIQ CAHYO CAHYO PRAYOGO PRAYOGO (21060113130131/A(21060113130131/Angkatan ngkatan 2013)2013) JUMIASIH
JUMIASIH (21060114120038/A(21060114120038/Angkatan ngkatan 2014)2014)
UNIVERSITAS DIPONEGORO UNIVERSITAS DIPONEGORO SEMARANG SEMARANG 2016 2016
DESAIN METODE KONTROL HYBRID PADA ROBOT INDUSTRI KONFIGURASI DELTA
Muhammad Fikko Fadjrimiratno1), Rofiq Cahyo Prayogo2), dan Jumiasih3)
1,2,3Teknik Elektro, Fakultas Teknik, Universitas Diponegoro
Abstrak
Robot konfigurasi Delta atau Delta robot adalah salah satu robot industri yang yang paling sukses diterapkan. Selain sebagai robot industri, Delta robot juga dapat diterapkan pada dunia medis. Pada proses industri, selalu dilakukan kalibrasi pada Delta robot agar posisi end-effector selalu sesuai yang diharapkan. Hal ini dikarenakan meskipun nilai sudut hasil perhitungan inverse kinematics sudah benar, namun posisi sudut lengan robot belum tentu sesuai, sehingga posisi
end-effector tidak sesuai yang diharapkan.
Oleh karena itu, penulis menawarkan desain kontrol umpan balik secara hybrid antara Resolved Motion Acceleration Control dan sistem kontrol PID. Dengan sensor potensiometer yang terpasang pada setiap lengan robot, sistem dapat
melakukan kalibrasi secara real-time pada motor penggerak lengan agar sudut yang dihasilkan selalu sesuai dengan sudut yang diberikan dari perhitungan inverse kinematics. Penelitian dilakukan dengan menerapkan metode kontrol yang telah didesain pada prototipe Delta robot hasil rancangan penulis. Pada hasil penelitian, metode kontrol ini terbukti membuat posisi lengan robot lebih tahan
terhadap keterulangan kerja dan masukan berbeban dari metode kontrol konvensional (non-hybrid). Penelitian ini diharapkan mampu menjadi pelopor penelitian Delta robot di Indonesia.
Kata Kunci: delta robot, rmac, pid, robot industri Abstract
Delta configurated robot or Delta robot is one of the most successfully aplied industrial robot. This kind of robot can also be applied into the surgery robot. In the industrial process, calibration is always done so that the end-effector position is always the one that is desired. That is because even the angle values generated from the inverse kinematics calculation are correct, but the real arm angle values
are not necessarily correct.
From above problems, the authors designed the hybrid closed loop control based on Resolved Motion Acceleration Control and PID control system. With the use of a potentiometer at each robot arm, the system is allowed to do the real-time calibration to each of the arm actuator so that the real angle value of each arm is as desired by inverse kinematics calculation. The research was done by applying designed control system to the prototype of Delta robot that had been designed by the authors. The result of the research proved that the controlled robot arms with designed control system are more durable to repetitiveness and loaded input than conventional non-hybrid control system. This research is expected to be the pioneer of Delta robot research in Indonesia.
I. PENDAHULUAN
Robot telah memberikan banyak manfaat bagi umat manusia. Perkembangan Robotika diawali pertunjukan lakon komedi berjudul Rossum’s Universal Robot oleh Karl Capek pada 1921 yang mengisahkan tentang sebuah mesin menyerupai manusia yang mampu bekerja secara terus menerus tanpa rasa lelah (Capek et al. 1921). Semenjak itu, perkembangan teknologi Robotika semakin berkembang dengan pesat.
Robot manipulator telah meningkatkan kualitas dan kecepatan industri manufaktur di berbagai negara. Pada tahun 1990, bisnis manufaktur Amerika Serikat sukses besar setelah menerapkan robot manipulator pada industri mereka (Lewis et al. 2004). Sejumlah perusahaan otomotif ternama telah menggunakan robot manipulator untuk meningkatkan kecepatan produksi dan mengurangi upah buruh.
Salah satu konfigurasi dari robot manipulator adalah robot industri konfigurasi Delta atau biasa disebut sebagai Delta robot. Delta robot merupakan parallel robot komersial yang paling sukses dan banyak digunakan sebagai robot pick and place (Briot & Bonev 2007). Pada robot pick and place, biasa dilakukan
kalibrasi agar posisi end-effector selalu sesuai dengan nilai sudut yang dihasilkan oleh perhitungan inverse kinematics, sehingga end-effector mampu mengambil ( pick ) objek tersebut dan menempatkannya ( place) sesuai keinginan. Hal ini dikarenakan tanpa dilakukannya kalibrasi, posisi yang dicapai end-effector belum tentu sesuai meskipun sudut dari hasil inverse kinematiks sudah benar. Berbagai metode kalibrasi dan kontrol telah diteliti oleh sejumlah ilmuwan untuk mengantisipasi ketidaksesuaian mekanis terhadap hasil inverse kinematiks tersebut. Olsson menghitung percepatan dan kecepatan dari tiap sendi untuk menggerakan tiap aktuator agar sesuai trajektori yang diberikan (Olsson 2009). Maurin menawarkan metode kalibrasi untuk mengkompensasi berkurangnya akurasi yang diakibatkan oleh pergeseran sendi akibat beban kerja yang terus menerus (Maurine & Dombre 2002). Namun, diperlukan data secara real time dari robot untuk memastikan apakah end-effector sudah sesuai dengan posisi koordinat yang diinginkan, sehingga posisi end-effector tetap akurat tanpa perlu dilakukannya kalibrasi.
Oleh karena itu, penulis menawarkan desain kontrol umpan balik secara hybrid antara Resolved Motion Acceleration Control (RMAC) dan sistem kontrol PID. Gerakan tiap motor servo pada lengan robot akan dikontrol oleh gabungan antara kontrol RMAC dan PID sehingga lengan bergerak sesuai sudut yang diberikan oleh hasil perhitungan invers kinematik. Besaran sudut pada lengan robot diukur oleh sensor potensiometer yang hasilnya akan diumpankan pada sistem kontrol sebagai nilai masukan.
II. TUJUAN
Tujuan dari penelitian ini adalah perancangan dan pembuatan sebuah prototipe kendali robot industri konfigurasi Delta sehingga dapat dimanfaatkan sesuai hal-hal berikut ini :
1. Mengetahui dan menerapkan inverse kinematics pada Delta robot.
2. Menguji metode kontrol gabungan (hybrid ) antara Resolved Motion Acceleration Control (RMAC) dan sistem kontrol PID pada pergerakan
motor servo terhadap sudut yang diinginkan.
3. Menganalisa dan membandingkan respon sistem dari metode kontrol yang telah didesain dengan metode kontrol konvensional non-hybrid seperti PID dan RMAC.
III. METODE PENELITIAN
3.1 Perancangan Metode Kontrol 3.1.1 Perhitungan Inverse Kinematics
Dari berbagai metode perhitungan inverse kinematics pada Delta robot, Williams menggunakan platform dengan desain segitiga yang dibalik dari segitiga pada base pada orientasi yang konstan (Gambar 3.1) (Williams 2015).
Gambar 3.1 Penggunaan Segitiga Platform yang dibalik (Williams 2015)
(a) (b)
Oleh Williams, dari penurunan rumus-rumus geometri dari Gambar 3.1 dan Gambar 3.2, didapatkan persamaan parameter yang digunakan dari tiap lengan robot sebagai berikut :
= 2
= 2
=
2
= (√ 3 )
= 2
=
2 2
= (√ 3 )
= 2
=
2 2
Subtitusikan Tangent Half-Angle dari persamaan di atas sehingga didapat :
1
1
2
1
= 0
1
2
1
= 0
2
= 0
Dari persamaan di atas, didapat formula kuadratik sebagai berikut :
,
=
−
±
−
+
−
(1) Selanjutnya,θ idapat dicari dengan membalik subtitusi awal dari Tangent Half- Angle sehingga didapat :
= 2
−
(2)Tanda ± pada (1) menandakan bahwa akan terdapat dua solusi
yang dihasilkan. Keduanya sama-sama benar dikarenakan terdapat dua solusi yang valid, yaitu knee yang menghadap ke kiri dan ke kanan. Hal ini menghasilkan dua solusi inverse kinematiks untuk setiap lengan dari Delta robot, untuk total 8 kemungkinan solusi yang valid. Pada umumnya, dipilih satu solusi dengan semua knee menekuk keluar yang akan dipilih.3.1.2 Perancangan Hybrid RMAC dan Sistem Kontrol PID
RMAC ( Resolved Motion Acceleration Control pada parallel robot konfigurasi delta membutuhkan masukan referensi berupa
(posisireferensi),
̇
(kecepatan referensi), dan ̈
(percepatan referensi).
didapat melalui perhitungan inverse kinematics dari persamaan (2). ̇
didapat melalui penurunan fungsi
. Sebagai tujuan dari kontrol akselerasi maka ketika robot bergerak diharapkan akselerasinya selalu nol, artinya, gangguan luar yang menyebabkan terjadinya “kejutan” atau “gangguan akselerasi” dapat diredam oleh RMAC (Pitowarno, 2006). Oleh karena itu, ̈
direferensikan dengan nilai nol.Selanjutnya,
(posisi aktual) diukur secara langsung menggunakan potensiometer. ̇
(kecepatan aktual) didapat dengan mengintegrasi
sementara ̈
(percepatan aktual) didapat dengan mengintegrasi ̇
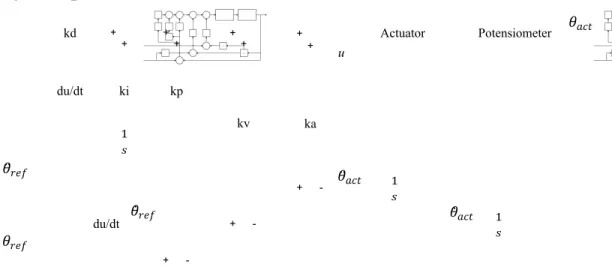
. Kemudian, error yang didapat dari selisih data referensi dan aktual diteruskan menuju komponen eliminator, kp, kv, dan ka. kp adalah komponen eliminator untuk error posisi, kv untuk kecepatan, dan ka untuk akselerasi. Ketiganya di-tuning dengan trial and error . Setelah itu didapat sinyal aktuasi u berupa counter yang akan memicu sinyal high pada motor servo sejumlah waktu tertentu. Skema ini diterapkan pada setiap motor servo. Delta robot memiliki tiga motor servo sehingga terdapat tiga skema RMAC yang memiliki cara kerja yang sama. Yang membedakan di antara ketiganya adalah variabel data referensi dan aktual.Pada gabungan antara RMAC dan sistem kontrol PID ( Proportional Integral Derivative), diharapkan kelebihan dari sistem kontrol PID dapat diaplikasikan pada RMAC. Seperti diketahui bahwa kontrol PID memiliki sifat yang dapat meredam maximum overshoot dan kemampuan meredam osilasi. Sistem kontrol PID hanya membutuhkan masukan berupa
. Kontrol PID membutuhkan komponen eliminator kp, ki, dan kd . Namun karena kp sudah terdapat pada RMAC , maka pada skema hybrid hanya perlu ditambahkan komponen ki dan kd . Nilai-nilai parameter ki, kd, kv, dan ka ditentukan secara trial and error , sedangkan nilai kp memiliki besaran yang adaptif berdasarkan besarnya error posisi. Semakin besar error posisi, maka makin kecil nilai kp dan berlaku sebaliknya. Skema gabungan kedua sistem kontrol tersebut ditunjukan pada Gambar 3.3.Gambar 3.3 Skema Sistem Kontrol Hybrid pada Delta Robot
kp kv + + + -+ -Actuator 1 ̇ u ̇ ka + + ̈ + - ̈ Potensiometer du/dt + + ki 1 kd + + du/dt 1
3.2 Perancangan Hardware dan Software 3.2.1 Alat dan Bahan
Bahan yang digunakan dalam penelitian ini adalah sebagai berikut : a. 3 buah motor servo Tower Pro MG5010
b. 1 unit prototipe Delta robot c. 1 buah UBEC 5 Ampere
d. 1 buah catu daya 11,1 V 1,3 Ampere
Alat yang digunakan dalam penelitian ini adalah sebagai berikut : a. Solder
b. Downloader USB-ASP c. Serial interface K125R d. CodeVision AVR 2.05.3 e. Solidwork 2015
f. Microsoft Visual Studio 2008 dengan library AForge.NET g. Microsoft Windows 10 Professional 64 bit
3.2.2 Perancangan Hardware
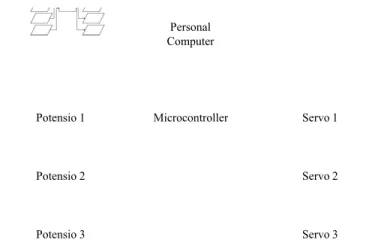
Berdasarkan Gambar 3.3, dirancang diagram blok perangkat keras pada prototipe Delta robot (Gambar 3.4). Perangkat keras yang dibutuhkan terdiri dari elemen pengukuran, elemen kontrol, dan elemen keluaran. Elemen pengukuran terdiri dari potensiometer dan kamera.
Potensiometer yang digunakan adalah tiga potensiometer bawaan motor servo Tower Pro MG5010. Elemen kontroler yang digunakan adalah satu unit PC ( Personal Computer ) dan satu unit mikrokontroler ATMega16A. PC digunakan untuk memproses perhitungan inverse kinematics dan Human Machine Interface (HMI) yang digunakan untuk mengamati respon sistem pada Delta robot. Sedangkan mikrokontroler digunakan untuk melakukan proses RMAC, membaca data potensiometer, dan membangkitkan sinyal PWM ( Pulse Width Modulation) untuk menggerakan motor servo. Kedua elemen kontroler saling berkomunikasi menggunakan serial interface K125R. Elemen keluaran terdiri dari tiga buah motor servo untuk menggerakan lengan robot. Personal Computer Microcontroller Potensio 1 Potensio 2 Potensio 3 Servo 1 Servo 2 Servo 3
3.2.3 Perancangan Fisik Prototipe Delta Robot
Fisik Delta robot dibuat dengan bahan akrilik tiga milimeter, dengan bahan persendian berupa ball joint dan lengan berupa threaded shaft set .Desain
dibuat menggunakan perangkat lunak Solidwork 2015. Desain dari Delta robot dan hasil akhirnya dapat dilihat pada Gambar 3.5.
Gambar 3.5 Desain Delta Robot dan Prototipe Uji Coba
IV. HASIL DAN PEMBAHASAN
4.1 Hasil Kalibrasi Potensiometer pada Lengan Robot
Untuk mendapatkan hasil pengukuran yang tepat, dilakukan kalibrasi potensiometer pada setiap lengan robot. Kalibrasi dilakukan dengan
mengamati nilai tegangan keluaran potensiometer (
) dan nilai ADC ( Analog to Digital Converter ) dalam desimal pada sudut -60º, 0º, dan 60º (Tabel 4.1). Untuk mencari nilai sudut dari nilai ADC, maka dapat digunakan persamaan sebagai berikut :Untuk
˃ CP
:
=
−
6
(3) Untuk
˂ CP
:
=
−
6
(4) Dimana,
= Nilai ADC yang terukur
= Nilai sudut yang terukur
= Nilai ADC ketika sudut bernilai 0º (Center Position)
= Nilai ADC ketika sudut bernilai -60º ( Minimum Position)Tabel 4.1 Hasil Kalibrasi Potensiometer pada Lengan Robot Arm 1
Angle (Degree) VPout (Volt) ADC Value (Decimal)
Minimum Position -60 2,35 481
Center Position 0 1,42 290
Maximum Position 60 0,50 102
Arm 2
Angle (Degree) VPout (Volt) ADC Value (Decimal)
Minimum Position -60 2.30 472
Center Position 0 1.42 291
Maximum Position 60 0.59 120
Arm 3
Angle (Degree) VPout (Volt) ADC Value (Decimal)
Minimum Position -60 2.33 478
Center Position 0 1.46 300
Maximum Position 60 0.56 115
4.2 Hasil Pengujian Sistem Kontrol 4.2.1 Pengujian Repetitiveness
Pada pengujian repetitiveness, diberikan sinyal masukan secara cepat dan berulang-ulang pada ketiga sistem kontrol yang diuji, PID, RMAC, dan Hybrid PID (Gambar 4.1). Terlihat pada Gambar 4.1 bahwa RMAC-PID mampu mengembalikan posisi lengan robot pada posisi yang diinginkan walaupun telah diberikan sinyal masukan acak secara cepat dan repetitive. Pada RMAC konvensional, lengan ketiga tidak dapat mengembalikan posisinya. Pada sistem kontrol PID, semua lengan tidak dapat mengembalikan posisinya, dimana terdapat error yang cukup besar dengan posisi yang diinginkan.
4.2.1 Pengujian Masukan dengan Beban
Pada pengujian ini, dikenakan beban seberat prototipe Delta robot itu sendiri pada ketiga sistem kontrol. Terlihat pada Gambar 4.2, RMAC-PID mampu menyesuaikan posisi lengan dengan baik walaupun diberikan beban yang cukup berat pada robot. Pada RMAC, masih terdapat sedikit error pada lengan pertama dan sedikit osilasi setelah sistem dalam steady state. Pada sistem kontrol PID, sistem tidak dapat menyesuaikan posisi lengan, dengan error yang cukup besar. Hal ini dikarenakan pada sistem kontrol PID, tidak terdapat komponen eliminator kv dan ka sehingga rentan terhadap berbagai gangguan yang melibatkan kecepatan dan percepatan.
(a) (b) (c)
Gambar 4.1 Pengujian Repetitiveness pada kontrol (a) PID (b) RMAC (c) RMAC-PID
(a) (b) (c)
Gambar 4.2 Pengujian masukan dengan beban pada kontrol (a) PID (b) RMAC (c) RMAC-PID
V. KESIMPULAN DAN SARAN
Artikel ini menghadirkan desain sistem kontrol metode hybrid (RMAC-PID) pada robot industri konfigurasi Delta. Sistem kontrol diuji pada prototipe Delta robot yang telah dibuat sebelumnya oleh penulis. Sebelum diuji, diberikan
perhitungan inverse kinematics pada Delta robot agar ketiga lengan robot dapat bergerak sesuai posisi yang diinginkan. Pada pengujian sistem kontrol, didapat bahwa RMAC-PID memiliki kemampuan yang paling baik dalam menangani repetitiveness dan masukan berbeban dibandingkan dengan sistem kontrol non-hybrid RMAC dan PID. Hal ini dikarenakan pada RMAC-PID, terdapat komponen eliminator percepatan dan kecepatan pada RMAC sehingga mampu menangani gangguan dinamis beban dan repetitiveness, dimana gangguan tersebut berhubungan dengan percepatan dan kecepatan, sementara komponen PID pada RMAC-PID mampu menjaga sistem dari overshoot yang berlebih dan menjaga kestabilan diferensial.
Pada penelitian selanjutnya, disarankan untuk menggunakan komponen eliminator yang nilainya dapat menyesuaikan dengan kondisi sistem, misalnya dengan menggunakan logika Fuzzy atau Neural Network . Lebih lanjut, sensor visual (kamera) dapat digunakan untuk melakukan kalibrasi secara langsung dengan objek yang hendak diangkat oleh Delta robot. Selain itu, perlu digunakan metode penerimaan data serial yang lebih baik untuk meningkatkan respon sistem terhadap nilai set point yang dikirimkan melalui PC.
VI. UCAPAN TERIMAKASIH
Penulis mengucapkan puji dan syukur kepada Tuhan Yang Maha Esa, dan apresiasi kepada Dr. Aris Triwiyatno, S.T, M.T, dan Sumardi, S.T, M.T, yang telah memberikan berbagai masukan dan saran pada penelitian ini. Penulis juga mengucapkan terima kasih kepada kedua orang tua penulis dan seluruh kerabat Teknik Elektro Universitas Diponegoro atas dukungan dan bantuannya dalam pembuatan artikel ini.
DAFTAR PUSTAKAA
Briot, S. & Bonev, I.A., 2007. Are Parallel Robots more Accurate than Serial Robots? Transactions of the Canadian Society for Mechanical Engineering , 31(4), pp.445 – 455.
Capek, K. Playfair, N. & Landes, W.A. 1921. Rossum’ s Universal Robots. Prague: CZ.
Lewis, F.L., Dawson, D.M. & Abdallah, C.T., 2004. Robot Manipulator Control. Theory and Practice, pp.656 – 661.
Maurine, P. & Dombre, E., 2002. A calibration procedure for the parallel robot Delta4. Robotics and Automation, 1996. Proceedings., 1996 IEEE
International Conference on, 2(April), pp.975 – 980.
Olsson, A., 2009. Modeling and control of a Delta-3 robot. Lund University, (February).
Pitowarno, E. 2006. Robotika: desain, kontrol, dan kecerdasan buatan, Yogyakarta: Penerbit Andi
Williams, R.L., 2015. The Delta Parallel Robot : Kinematics Solutions. , (4), pp. 1-46.
LAMPIRAN
–
LAMPIRANLampiran 1. Biodata Ketua dan Anggota 1. Ketua Pelaksana Program
A. Identitas Diri
1. Nama Lengkap Muhammad Fikko Fadjrimiratno
2. Jenis Kelamin L
3. Program Studi S-1 Teknik Elektro
4. NIM 21060112110046
5. Tempat dan Tanggal Lahir Semarang, 26 Maret 1995
6. E-mail [email protected] 7. Nomor Telepon / HP 0248311087 / 085641860438 B. Riwayat Pendidikan SD SMP SMA Nama Institusi SDN Sompok 04 Semarang SMPN 2 Semarang SMAN 1 Semarang Jurusan - - IPA Tahun 2001 – 2006 2006 – 2009 2009 - 2012
C. Penghargaan dalam 10 tahun Terakhir
No Jenis Penghargaan Institusi Pemberi
Penghargaan Tahun
1. Juara 3 Lomba Robot
Maze Solving Universitas Sebelas Maret 2010
2. Juara 1 Lomba Mata
Pelajaran TIK Dinas Pendidikan Semarang 2010
3. Honorable Mention INESPO 2012
2. Anggota Pelaksana Kegiatan A. Identitas Diri
1. Nama Lengkap Rofiq Cahyo Prayogo
2. Jenis Kelamin L
3. Program Studi S1 Teknik Elektro
4. NIM 21060113130131
5. Tempat dan Tanggal Lahir Semarang, 29 Mei 1995
6. E-mail [email protected] 7. Nomor Telepon / HP 081542521442 B. Riwayat Pendidikan SD SMP SMA Nama Institusi SD N 02 Gayamsari SMP N 03 Semarang SMA N 03 Semarang Jurusan - - IPA Tahun 2001-2007 2007-2010 2010-2013
C. Penghargaan dalam 10 tahun Terakhir
No Jenis Penghargaan Institusi Pemberi
Penghargaan Tahun
1. Juara 1 lomba EIA Universitas Diponegoro 2011
2. Medali Perak
Presentasi PIMNAS Kemenristek DIKTI 2015
3. Conference Highlight Presentation pada IEEE TENCON 2015 IEEE 2015 4. Juara I KRPAI