Informasi Dokumen
- Penulis:
- Reda Anggra Distira
- Pengajar:
- Ir. Widyono Hadi, MT
- Sumardi, S.T., M.T
- Sekolah: Universitas Jember
- Mata Pelajaran: Teknik Elektro
- Topik: Desain Sistem Navigasi Robot Dengan Isyarat Mata Menggunakan Metode Canny Dan Hough Transform
- Tipe: skripsi
- Tahun: 2012
- Kota: Jember
Ringkasan Dokumen
I. PENDAHULUAN
Bab ini menjelaskan latar belakang pentingnya penelitian sistem navigasi robot yang menggunakan isyarat mata. Dalam konteks pendidikan, penelitian ini relevan untuk mengembangkan keterampilan mahasiswa dalam teknologi robotika dan pengolahan citra. Dengan memahami sistem navigasi robot, mahasiswa dapat menerapkan teori-teori yang telah dipelajari dalam praktik nyata. Penelitian ini juga membuka peluang untuk inovasi di bidang teknologi, seperti pembuatan alat bantu bagi penyandang disabilitas.
1.1 Latar Belakang
Perkembangan robotika yang pesat memerlukan penelitian dalam sistem navigasi. Penelitian ini bertujuan untuk menggabungkan teknologi pengolahan citra dengan robotika, khususnya dalam mendeteksi pergerakan bola mata untuk navigasi robot. Ini memberikan wawasan baru bagi mahasiswa tentang aplikasi praktis dari pengolahan citra dalam kehidupan sehari-hari.
1.2 Rumusan Masalah
Rumusan masalah mencakup bagaimana merancang sistem navigasi robot menggunakan isyarat mata, serta metode yang digunakan untuk mendeteksi posisi bola mata. Hal ini penting bagi mahasiswa untuk memahami proses penyelesaian masalah teknis dalam proyek robotika.
1.3 Tujuan
Tujuan penelitian ini adalah untuk menciptakan sistem navigasi robot yang dapat dikendalikan secara wireless dan mendeteksi posisi bola mata menggunakan metode Canny dan Hough Transform. Ini memberikan mahasiswa pemahaman mendalam tentang teknologi yang dapat diterapkan dalam pengembangan produk inovatif.
1.4 Manfaat
Manfaat dari penelitian ini adalah penerapan sistem yang dirancang untuk navigator robot dan implementasi algoritma dalam pengolahan citra. Ini membantu mahasiswa memahami nilai praktis dari teori yang dipelajari dan bagaimana mengaplikasikannya dalam dunia nyata.
1.5 Batasan Penelitian
Batasan penelitian ini mencakup penggunaan mikrokontroler AVR ATMega 8535 dan metode Canny serta Hough Transform untuk pendeteksian bola mata. Ini mengajarkan mahasiswa tentang pentingnya batasan dalam penelitian untuk fokus pada masalah yang spesifik.
1.6 Sistematika Penulisan
Sistematika penulisan yang jelas membantu mahasiswa dalam menyusun laporan penelitian secara sistematis. Ini juga berfungsi sebagai panduan untuk memahami alur penelitian dari pendahuluan hingga kesimpulan.
II. TINJAUAN PUSTAKA
Bab ini mengulas teori-teori yang mendukung penelitian, termasuk kendali robot dan pengolahan citra digital. Ini penting dalam konteks pendidikan karena memberikan dasar teoritis yang diperlukan untuk memahami aplikasi praktis dari teknologi yang digunakan.
2.1 Kendali Robot
Kendali robot dibagi menjadi dua kelompok: robot otomatis dan teleoperated. Pemahaman ini penting bagi mahasiswa untuk membedakan jenis-jenis robot dan cara kerjanya, serta aplikasi dalam dunia nyata.
2.2 Pengertian Citra Digital
Pengertian citra digital dan proses pengolahannya merupakan dasar penting dalam penelitian ini. Mahasiswa belajar tentang bagaimana citra diolah dan digunakan dalam aplikasi robotika.
2.2.1 Pengolahan Citra Warna
Pengolahan citra warna adalah bagian penting dari pengolahan citra digital. Ini membantu mahasiswa memahami bagaimana warna dapat diolah untuk keperluan deteksi objek dalam robotika.
2.2.2 Edge Detection
Deteksi tepi adalah teknik penting dalam pengolahan citra. Mahasiswa belajar tentang metode Canny dan penerapannya dalam mendeteksi tepi objek, yang relevan untuk sistem navigasi robot.
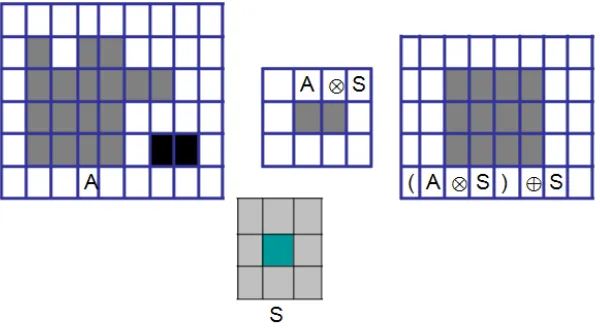
2.2.3 Operasi Morfologi
Operasi morfologi membantu dalam pengolahan citra biner dan grayscale. Ini memberikan mahasiswa keterampilan dalam pengolahan citra yang lebih kompleks.
2.2.4 Citra Gray-Scale
Konversi citra berwarna menjadi gray-scale adalah proses awal dalam pengolahan citra. Mahasiswa belajar tentang pentingnya menyederhanakan citra untuk analisis lebih lanjut.
2.2.5 Thresholding
Thresholding adalah teknik untuk memisahkan objek dari latar belakang. Ini penting bagi mahasiswa untuk memahami bagaimana memanipulasi citra untuk meningkatkan akurasi deteksi.
2.2.6 Transformasi Hough
Transformasi Hough digunakan untuk mendeteksi bentuk geometris dalam citra. Mahasiswa belajar tentang penerapannya dalam mendeteksi posisi bola mata dalam penelitian ini.
2.3 AVR AT Mega 8535
Mikrokontroler AVR adalah komponen penting dalam sistem. Mahasiswa belajar tentang spesifikasi dan cara kerja mikrokontroler yang digunakan dalam proyek ini.
2.4 Modul RF TLP433.92A dan Penerima RF RLP433.92-LC
Modul RF digunakan untuk komunikasi nirkabel. Mahasiswa memahami pentingnya komunikasi dalam sistem robotika dan bagaimana mengimplementasikannya.
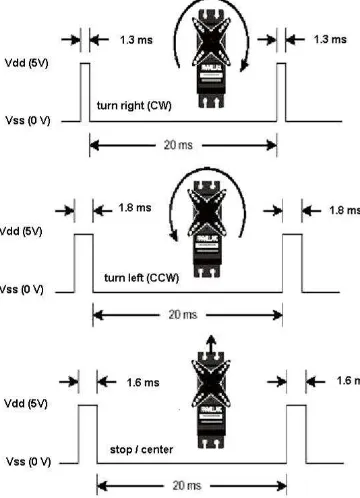
2.5 Motor Servo
Motor servo adalah komponen kunci dalam penggerakan robot. Mahasiswa belajar tentang jenis-jenis motor servo dan cara kerjanya dalam sistem navigasi.
III. METODOLOGI PENELITIAN
Metodologi penelitian menjelaskan langkah-langkah yang diambil dalam penelitian ini. Ini penting untuk pendidikan karena memberikan panduan bagi mahasiswa tentang cara melakukan penelitian yang sistematis dan terstruktur.
3.1 Tempat dan Waktu Penelitian
Penelitian dilakukan di Laboratorium Instrumentasi dan Otomasi Pabrik. Mahasiswa belajar tentang pentingnya pemilihan lokasi penelitian yang tepat untuk mendapatkan hasil yang valid.
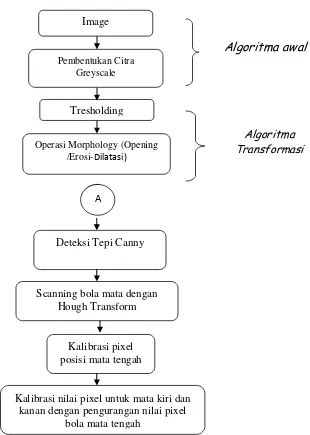
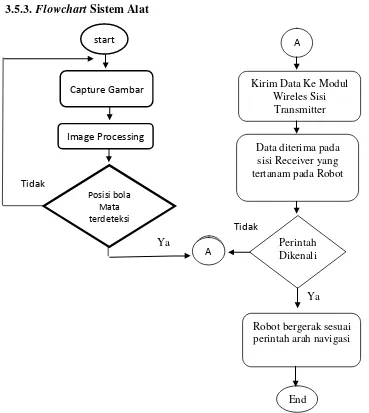
3.2 Tahapan Penelitian
Tahapan penelitian mencakup studi literatur, perancangan sistem, pengujian, dan analisis. Ini mengajarkan mahasiswa tentang pentingnya setiap langkah dalam proses penelitian.
3.3 Desain Sistem Perangkat
Desain sistem perangkat mencakup perangkat keras dan perangkat lunak yang digunakan. Mahasiswa belajar tentang integrasi berbagai komponen dalam sistem robotika.
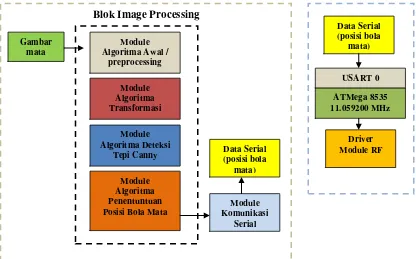
3.3.1 Blok perangkat keras transmitter
Blok perangkat keras transmitter mengatur pengiriman data posisi bola mata. Mahasiswa memahami pentingnya komunikasi data dalam sistem robot.
3.3.2 Blok perangkat keras robot
Blok perangkat keras robot mengatur penerimaan dan pengolahan data. Ini memberikan mahasiswa pengalaman langsung dalam merakit dan mengoperasikan robot.
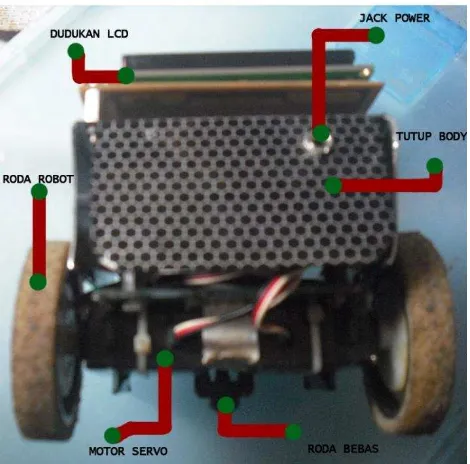
3.3.3 Mekanik robot
Desain mekanik robot dilakukan untuk memastikan kestabilan dan mobilitas. Mahasiswa belajar tentang pentingnya desain mekanik dalam kinerja robot.
3.3.4 Sistem komunikasi wireless
Sistem komunikasi nirkabel digunakan untuk menghubungkan robot dan komputer. Mahasiswa belajar tentang teknologi komunikasi yang digunakan dalam robotika.
3.3.4.1 Driver TLP 433 MHz
Driver TLP 433 MHz digunakan untuk mengirimkan data secara nirkabel. Mahasiswa memahami cara kerja modul RF dalam komunikasi data.
3.3.4.2 Driver RLP 433 MHz
Driver RLP 433 MHz menerima data dari pemancar. Ini mengajarkan mahasiswa tentang pentingnya penerimaan data dalam sistem komunikasi nirkabel.
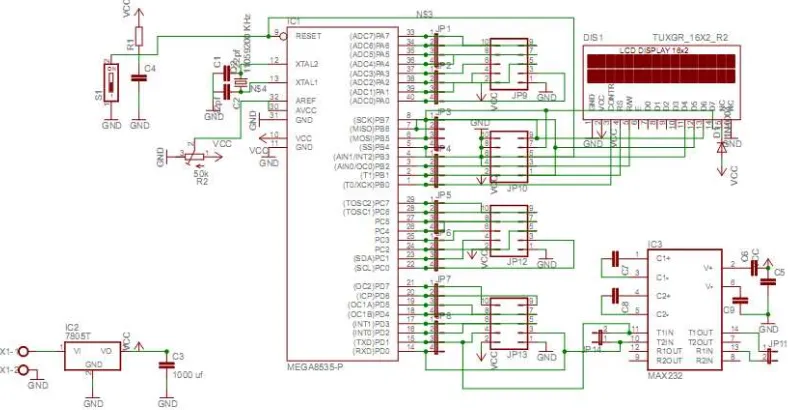
3.3.5 Main Controller Board
Sistem minimum mikrokontroler mengatur fungsi dasar robot. Mahasiswa belajar tentang komponen penting dalam pengendalian robot.
IV. HASIL DAN PEMBAHASAN
Bab ini menyajikan hasil penelitian dan analisis data yang diperoleh. Ini penting untuk pendidikan karena memberikan mahasiswa pemahaman tentang bagaimana menganalisis data dan menarik kesimpulan dari hasil penelitian.
4.1 Hasil Percobaan Perangkat Keras
Hasil percobaan perangkat keras menunjukkan kinerja sistem. Mahasiswa belajar tentang pentingnya pengujian untuk memastikan bahwa sistem berfungsi dengan baik.
4.1.1 Percobaan Rangkaian Pemancar
Percobaan pemancar menunjukkan efektivitas komunikasi data. Mahasiswa memahami bagaimana pengujian dapat mengidentifikasi masalah dalam sistem.
4.1.2 Hasil Percobaan Pengujian Motor Servo
Pengujian motor servo menunjukkan respons terhadap perintah. Ini memberikan mahasiswa pengalaman dalam pengujian komponen robot.
4.1.3 Hasil Percobaan Rangkaian Driver LCD
Hasil percobaan driver LCD menunjukkan informasi yang ditampilkan. Mahasiswa belajar tentang pentingnya umpan balik visual dalam sistem robot.
4.2 Hasil Percobaan Perangkat Lunak
Hasil percobaan perangkat lunak menunjukkan keberhasilan algoritma. Mahasiswa memahami pentingnya perangkat lunak dalam mengendalikan perangkat keras.
4.2.1 Pengujian Menampilkan Video Frame
Pengujian video frame menunjukkan kemampuan sistem dalam menangkap gambar. Ini memberikan mahasiswa keterampilan dalam pengolahan citra.
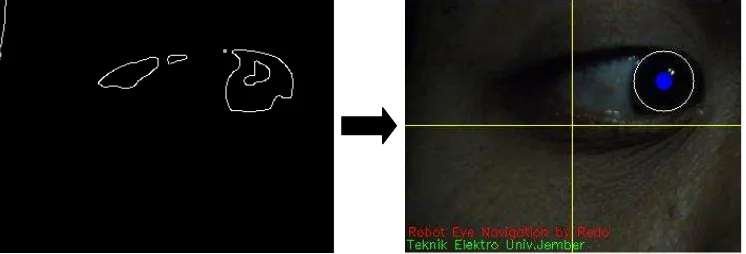
4.2.2 Pengujian Algoritma Deteksi Tepi Canny
Pengujian algoritma Canny menunjukkan efektivitas deteksi tepi. Mahasiswa belajar tentang pentingnya algoritma dalam pengolahan citra.
4.2.3 Pengujian Algoritma Deteksi Bola Mata
Pengujian deteksi bola mata menunjukkan akurasi sistem. Mahasiswa memahami bagaimana algoritma dapat diterapkan dalam aplikasi nyata.
4.2.4 Pengujian Komunikasi Serial
Pengujian komunikasi serial menunjukkan transfer data yang efektif. Ini memberikan mahasiswa pemahaman tentang pentingnya komunikasi dalam robotika.
4.3 Pengujian Percobaan Sistem Secara Keseluruhan
Pengujian keseluruhan sistem menunjukkan kinerja yang baik. Mahasiswa belajar bagaimana mengintegrasikan berbagai komponen dalam sistem.
4.3.1 Pengujian Delay Waktu Kerja Sistem
Pengujian delay waktu menunjukkan respons sistem terhadap perintah. Ini mengajarkan mahasiswa tentang pentingnya waktu respons dalam sistem robot.
4.3.2 Pengujian Pada Lintasan L Tanpa Halangan
Pengujian tanpa halangan menunjukkan efektivitas navigasi. Mahasiswa memahami bagaimana lingkungan mempengaruhi kinerja robot.
4.3.3 Pengujian Pada Lintasan L Dengan Halangan
Pengujian dengan halangan menunjukkan tantangan dalam navigasi. Ini memberikan mahasiswa wawasan tentang pengujian sistem dalam kondisi nyata.
V. PENUTUP
Bab ini menyimpulkan hasil penelitian dan memberikan saran untuk pengembangan lebih lanjut. Ini penting untuk pendidikan karena mengajarkan mahasiswa bagaimana merangkum penelitian dan memberikan rekomendasi untuk perbaikan.
5.1 Kesimpulan
Kesimpulan penelitian menunjukkan bahwa sistem navigasi robot dengan isyarat mata berhasil dirancang. Mahasiswa belajar bagaimana menarik kesimpulan dari hasil penelitian.
5.2 Saran
Saran untuk pengembangan lebih lanjut mencakup peningkatan algoritma dan pengujian di lingkungan yang lebih kompleks. Ini mengajarkan mahasiswa tentang pentingnya inovasi dalam penelitian.