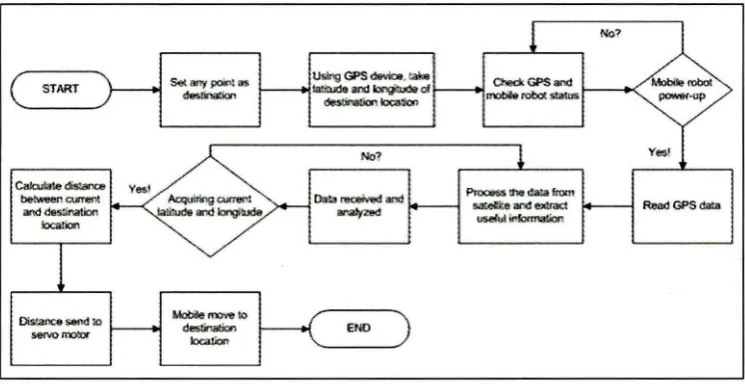
Mobile robot using GPS module.
Bebas
24
0
0
Teks penuh
Gambar
Garis besar
Dokumen terkait
In conclusion, the movement of the robot can be controlled by applying DTMF technique to move a chemical filled test tube in a small laboratory.. Hence, it
Landmark navigation is the most important things for the mobile robot to navigate the system by using its sensory input and generally it‟s divided into three type
The Bluetooth will receive a signal from the user and then transmit the signal back to the microcontroller that works as the brain of the robot to declare it is a home destination
Implementation of Fuzzy Logic Control Algorithm in Mobile Robot Avoider by Using
The movement of versatile robot on the complicated way is mimicked by utilizing the Robot Test system which is programed in Matlab to plan and test the exhibition of the proposed line
Referred to the result above, the data that was received by GPS receiver can be used as the referenced position for the calculation pray time as shown in Table 4.3.. The data is valid
Mobile Robot Navigation in Unknown Environments Using Omnidirectional Stereo and Laser Range Finder Yoshiro Negishi, Jun Miura, and Yoshiaki Shirai Department of Computer-Controlled
This research aims to implement a navigation system based on Dewantara & Ariyadi, 2021 with the combination of the Fuzzy-Social Force Model FSFM into a mobile robot that can navigate
