Jurnal
Elektro
PENS
www.jurnalpa.eepis-its.edu
Teknik Elektronika
Vol.2, No.2, 2015
Politeknik Elektronika Negeri Surabaya
Sistem Navigasi Mobile Robot Omni Directional Menggunakan Multi Sensor
Optical Mouse Untuk Meningkatkan Akurasi
Didik Dwi Waluyo, Dr. Zainal Arief, S.T, M.T , Akhmad Hendriawan, S.T, M.T.
Program Studi D4 Teknik Elektronika Departemen Teknik Elektro Politeknik Elektronika Negeri Surabaya Kampus PENS, Jalan Raya ITS Sukolilo, Surabaya 60111
Tel: (031) 594 7280; Fax: (031) 594 6114
Email:didikdw@gmail.com,zar@pens.ac.id,hendri@eepis-its.edu,
Abstrak
Robotika merupakan bidang ilmu pengetahuan yang mengalami perkembangan dengan cepat. Selain itu, tingkat kecerdasan robot yang semakin tinggi cenderung meminimalisasikan campur tangan manusia. Untuk dapat bekerja secara otomatis maka suatu robot harus mempunyai 3 buah komponen yaitu input (data masukan yang akan diolah), kecerdasan (suatu algoritma yang menangani pengambilan keputusan yang didasarkan pada masukan) dan output (keputusan yang diambil ). Navigasi robot erat kaitanya dengan mobilitas dari robot tersebut. Mobilitas yang tinggi sangat bermanfaat karena akan mempengaruhi kecepatan robot mencapai target tanpa membuang waktu untuk bermanuver dalam pergerakan robot. Sebuah robot omnidrectional merupakan solusi untuk memecahkan masalah mobilitas karena robot dapat bergerak ke segala arah tanpa memutar badannya. Aspek penting dalam otomatisasi robot adalah teknik membangun peta, kemampuan menghindari halangan, dan lokalisasi posisi robot . Pada penelitian sebelumnya sensor yang digunakan adalah rotary encoder yang memerlukan roda untuk dapat menentukan posisi dan orientasi robot. Dalam pemakaian roda besar kemungkinan akan terjadi selip sehingga pembacaan rotary encoder menjadi error. Oleh karena itu pada proyek akhir ini dirancang system navigasi mobile robot menggunakan sensor optical laser yang diharapakan dapat mengurangi eror yang diakibatkan selip roda seperti pada penelitian sebelumnya. Digunakan optical laser berjumlah dua untuk meminimalkan kesalahan pembacaan posisi dan orientasi robot. Prosentase keberhasilan robot menuju target pada proyek akhir ini mencapai sekitar 94%. Peningkatan akurasi dari penggunaan satu sensor da dua sensor sebear 5%.
1. Pendahuluan
Dewasa ini, salah satu masalah penting dalam perkembangan mobile robot adalah masalah mobilitas robot. Dikembangkan sebuah robot yang tidak hanya dapat bergerak maju dan mundur tetapi dapat bergerak ke segala arah (omnidirection atau holonomic) dalam bidang kartesian X-Y tanpa perlu memutar badannya. Dengan demikian robot ini akan mempunyai mobilitas yang tinggi.
Selain itu, sebuah robot akan memiliki nilai lebih apabila robot mampu bernavigasi secara otomatis (autonomus). Aspek penting dalam navigasi otomatis meliputi kemampuan mengetahui posisi mobile robot. Tugas Akhir ini difokuskan pada pembahasan navigasi mobile robot, yang memiliki misi khusus menuju target tertentu. Beberapa sensor yang sering digunakan dalam lokalisasi posisi robot meliputi sensor encoder, sensor jarak, dan kamera. Namun sensor-sensor tersebut masih memiliki kekurangan, yaitu sensor encoder akan mengalami kesalahan perhitungan bila roda robot selip, sensor jarak membutuhkan jarak pandang yang terbatas, kemampuan kepresisian sensor dan sudut pemancaran sensor, serta kamera memiliki kelemahan dalam perhitungan dan pembacaan yang akan memberatkan mikroprosesor. Oleh sebab itu, dalam Tugas akhir ini digunakan optical mouse sebagai sensor posisi robot karena keluarannya berupa posisi X dan Y dalam satuan piksel di komputer dengan presisi yang tinggi dan harga relatif murah.
Lokalisasi mobile robot merupakan kemampuan memperkirakan posisi dan orientasi mobile robot. Setidaknya untuk dapat memperkirakan posisi dan orientasi robot, suatu robot harus mempunyai minimal dua optical mouse agar dapat membaca orientasi robot saat berotasi.
Tujuan penelitian:
Merancang dan membuat mobile robot yang dapat bergerak kesegela arah (omni-directional). Merancang dan membuaat sistem sensor untuk mengetahui posisi mobile robot menggunkan
sensor optical mouse.
Menganalisa hasil pembacaan sensor optical mouse untuk mengetahui posisi mobile robot. Rumusan masalah:
Bagaimana algoritma agar mobile robot mampu menuju target yang telah ditentukan. Bagaimana mobile robot mampu mengetahui posisinya.
Bagaimana mengelola data dari optical mouse untuk mengetahui posisi mobile robot
2. METODE
Optical Mouse ADNS-5050
Sensor optical mouse yang digunakan adalah type 5050 keluaran dari AVAGO. ADNS-5050 adalah produk yang user-friendly dengan banyak builtin fitur. ADNS-ADNS-5050 mampu mendeteksi gerakan dengan kecepatan tinggi, Sampai dengan 30ips dan 8g. Selain itu, memiliki on-chip osilator dan built-in driver LED untuk meminimalkan komponen tambahan. Frame rate juga disesuaikan secara internal. ADNS-5050 dengan lensa 5100-001. Sensor diprogram melalui register denagn komunikasi SPI. Semua dikemas dalam sebuah 8-pin dual in-line package (DIP). ADNS-5050 memiliki fitur sebagai berikut:
Built-in driver LED untuk meminimalkan rangkaian
Kecepatan tinggi mendeteksi gerakan di 30 ips sampai 8g
Frame rate dapat dirubah untuk meningkatkan peforma
Memiliki internal oscillator
Standar 500 resolusi cpi, dapat disesuaikan 125-1375 cpi
Operasi tegangan: 5V
Tiga kabel komunikasi serial
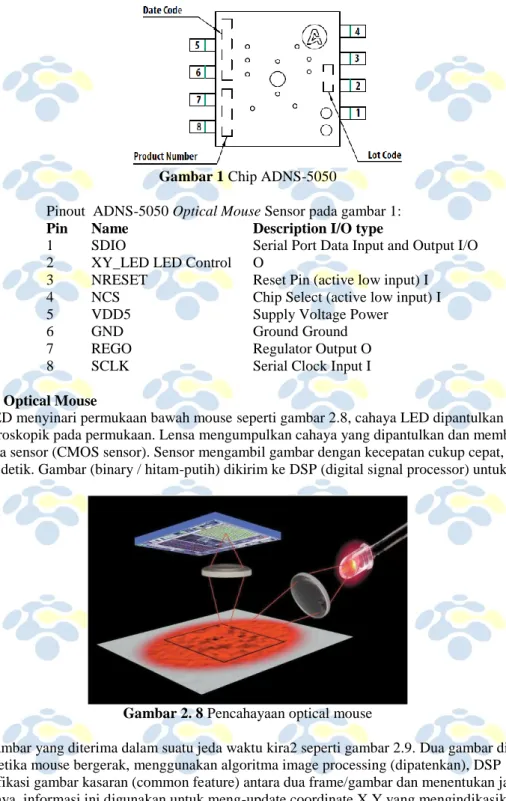
Gambar 1 Chip ADNS-5050
Pinout ADNS-5050 Optical Mouse Sensor pada gambar 1:
Pin Name Description I/O type
1 SDIO Serial Port Data Input and Output I/O
2 XY_LED LED Control O
3 NRESET Reset Pin (active low input) I
4 NCS Chip Select (active low input) I
5 VDD5 Supply Voltage Power
6 GND Ground Ground
7 REGO Regulator Output O
8 SCLK Serial Clock Input I
Cara kerja Optical Mouse
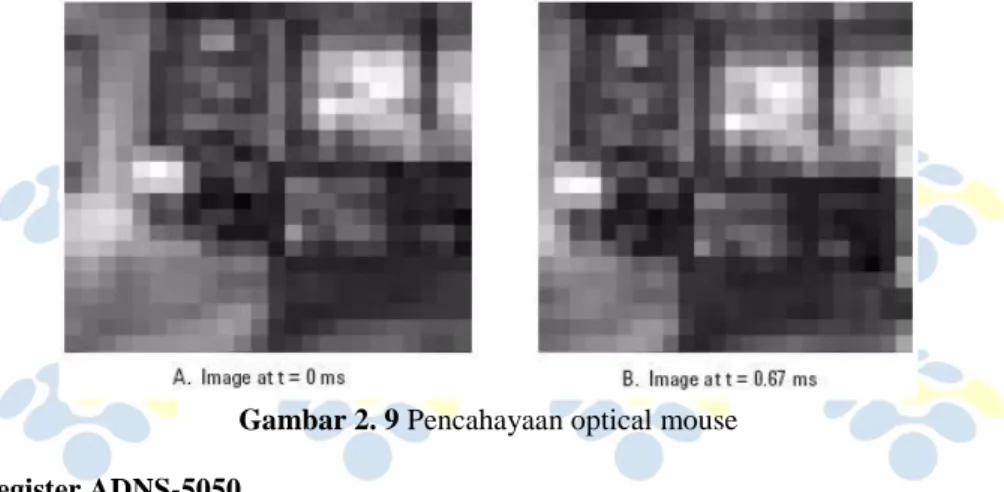
LED menyinari permukaan bawah mouse seperti gambar 2.8, cahaya LED dipantulkan oleh tekstur mikroskopik pada permukaan. Lensa mengumpulkan cahaya yang dipantulkan dan membentuk gambar pada sensor (CMOS sensor). Sensor mengambil gambar dengan kecepatan cukup cepat, 1500 gambar per detik. Gambar (binary / hitam-putih) dikirim ke DSP (digital signal processor) untuk diolah.
Gambar 2. 8 Pencahayaan optical mouse
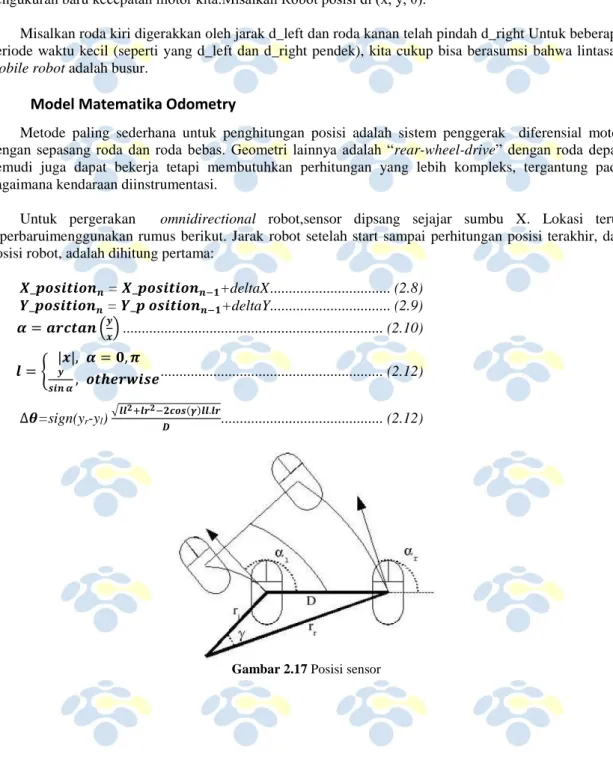
Gambar yang diterima dalam suatu jeda waktu kira2 seperti gambar 2.9. Dua gambar diambil berurutan ketika mouse bergerak, menggunakan algoritma image processing (dipatenkan), DSP mengidentifikasi gambar kasaran (common feature) antara dua frame/gambar dan menentukan jarak pergeserannya, informasi ini digunakan untuk meng-update coordinate X,Y yang mengindikasikan pergerakan mouse.
Gambar 2. 9 Pencahayaan optical mouse
Penulisan register ADNS-5050
Penulisan register adalah menuliskan data dari mikrokontroler ke register ADNS-5050. Terdiri dari 2 byte. Byte yang pertama berisi 7 bit alamat register yang selalu memiliki nilai MSB “1” untuk menunjukan arah komunikasi data. Byte kedua berisi data. ADNS-5050 membaca SDIO pada saat SCLK dari nilai “0” menjadi “1” (rissing edge).
Gambar 2 Timing diagram write operation
Pembacaan register ADNS-5050
Pembacaan register adalah pengiriman data dari ADNS-5050 ke mikrokontroler, terdiri dari dua Byte. Byte pertama berisi alamat dan memiliki nilai MSB “0” untuk menunjukakan arah komunikasi data yaitu dari ADNS-5050 ke mikrokontroler, SDIO dibaca mikrokontroler pada saat kondisi SCLK naik dari “0” menjadi “1” (rissing edge).
.
Gambar 3 Timing diagram read operation ODOMETRY
Sebuah metode dasar navigasi, digunakan oleh hampir semua robot, adalah odometry.Misalkan robot Anda dimulai pada start, menunjuk ke sumbu-y. Posisi awal adalah (x, y, θ) = (0, 0, 0). Jika robot berjalan(kira-kira) selama tiga detik pada 1 m / s, menuju target yang dikehendaki misal (3, 0, 0). Itulah esensi dari odometry.
Turunan Fungsi Odometry
Kecepatan motor memberi kita dua kuantitas yaitu tingkat di mana posisi mobile robot sudah berubah, dan tingkat di mana mobile robot bergerak maju. Yang harus kita lakukan adalah mengintegrasikan dua kuantitas, dan kita akan memiliki posisi robot (x, y, θ). Dalam sistem yang sebenarnya, data berasal dari
sensor yang diambil dengan sampel secara berkala.Setiap beberapa milidetik, kita mendapatkan pengukuran baru kecepatan motor kita.Misalkan Robot posisi di (x, y, θ).
Misalkan roda kiri digerakkan oleh jarak d_left dan roda kanan telah pindah d_right Untuk beberapa periode waktu kecil (seperti yang d_left dan d_right pendek), kita cukup bisa berasumsi bahwa lintasan mobile robot adalah busur.
Model Matematika Odometry
Metode paling sederhana untuk penghitungan posisi adalah sistem penggerak diferensial motor dengan sepasang roda dan roda bebas. Geometri lainnya adalah “rear-wheel-drive” dengan roda depan kemudi juga dapat bekerja tetapi membutuhkan perhitungan yang lebih kompleks, tergantung pada bagaimana kendaraan diinstrumentasi.
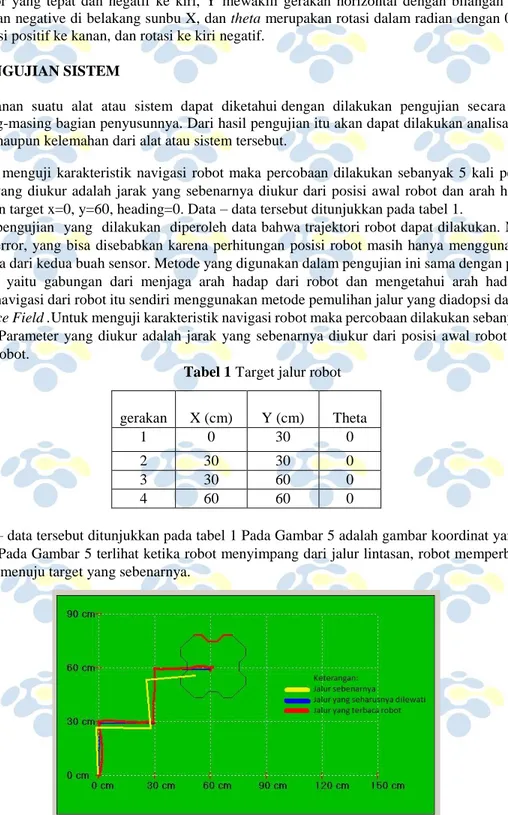
Untuk pergerakan omnidirectional robot,sensor dipsang sejajar sumbu X. Lokasi terus diperbaruimenggunakan rumus berikut. Jarak robot setelah start sampai perhitungan posisi terakhir, dan posisi robot, adalah dihitung pertama:
𝑿_𝒑𝒐𝒔𝒊𝒕𝒊𝒐𝒏𝒏 = 𝑿_𝒑𝒐𝒔𝒊𝒕𝒊𝒐𝒏𝒏−𝟏+deltaX ... (2.8) 𝒀_𝒑𝒐𝒔𝒊𝒕𝒊𝒐𝒏𝒏 = 𝒀_𝒑 𝒐𝒔𝒊𝒕𝒊𝒐𝒏𝒏−𝟏+deltaY ... (2.9) 𝜶 = 𝒂𝒓𝒄𝒕𝒂𝒏 (𝒚 𝒙) ... (2.10) 𝒍 = { |𝒙|, 𝜶 = 𝟎, 𝝅𝒚 𝒔𝒊𝒏 𝜶, 𝒐𝒕𝒉𝒆𝒓𝒘𝒊𝒔𝒆 ... (2.12) ∆𝜽=sign(yr-yl) √𝒍𝒍𝟐+𝒍𝒓𝟐−𝟐𝒄𝒐𝒔(𝜸)𝒍𝒍.𝒍𝒓 𝑫 ... (2.12)
Untuk heading dari robot, data dihasilkan oleh selisih dari jarak Y_position1 dan Y_position2 dengan seperti pada persamaan.Fungsi odometry pada robot kemudian bergerak sesuai posisi robot dengan mengumpulkan perubahan di X, Y, Theta dan menjaga ketiga nilai: X_position , Y_position , dan theta .
Nilai-nilai ini membuat sistem koordinat di mana X mewakili gerakan lateral, dengan angka positif untuk nomor yang tepat dan negatif ke kiri, Y mewakili gerakan horizontal dengan bilangan positif di depannya dan negative di belakang sunbu X, dan theta merupakan rotasi dalam radian dengan 0 lurus ke depan , rotasi positif ke kanan, dan rotasi ke kiri negatif.
3. PENGUJIAN SISTEM
Ketahanan suatu alat atau sistem dapat diketahui dengan dilakukan pengujian secara bertahap pada masing-masing bagian penyusunnya. Dari hasil pengujian itu akan dapat dilakukan analisa terhadap kestabilan maupun kelemahan dari alat atau sistem tersebut.
Untuk menguji karakteristik navigasi robot maka percobaan dilakukan sebanyak 5 kali percobaan. Parameter yang diukur adalah jarak yang sebenarnya diukur dari posisi awal robot dan arah hadap dari robot dengan target x=0, y=60, heading=0. Data – data tersebut ditunjukkan pada tabel 1.
Dari pengujian yang dilakukan diperoleh data bahwa trajektori robot dapat dilakukan. Meskipun masih ada error, yang bisa disebabkan karena perhitungan posisi robot masih hanya menggunakan nilai rata-rata data dari kedua buah sensor. Metode yang digunakan dalam pengujian ini sama dengan pengujian sebelumnya yaitu gabungan dari menjaga arah hadap dari robot dan mengetahui arah hadap robot, sedangkan navigasi dari robot itu sendiri menggunakan metode pemulihan jalur yang diadopsi dari metode Virtual Force Field .Untuk menguji karakteristik navigasi robot maka percobaan dilakukan sebanyak 5 kali percobaan. Parameter yang diukur adalah jarak yang sebenarnya diukur dari posisi awal robot dan arah hadap dari robot.
Tabel 1 Target jalur robot
gerakan X (cm) Y (cm) Theta
1 0 30 0
2 30 30 0
3 30 60 0
4 60 60 0
Data – data tersebut ditunjukkan pada tabel 1 Pada Gambar 5 adalah gambar koordinat yang dibaca oleh robot. Pada Gambar 5 terlihat ketika robot menyimpang dari jalur lintasan, robot memperbarui arah resultannya menuju target yang sebenarnya.
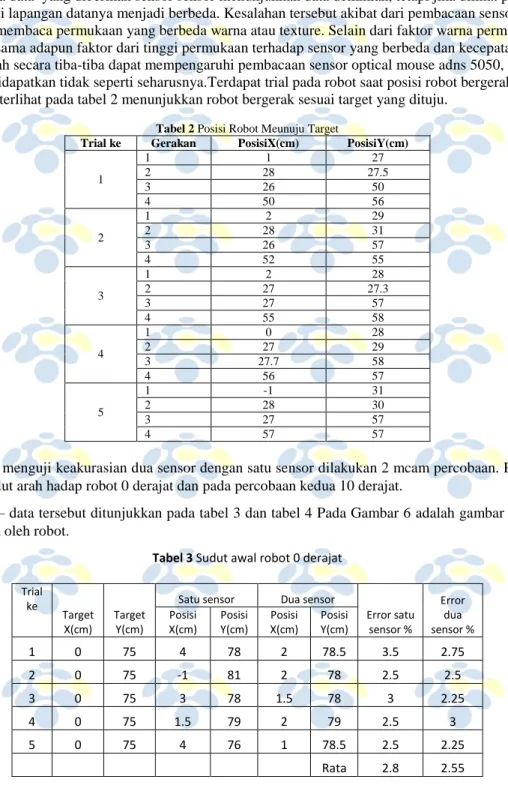
Jika dibandingkan jalur pada Gambar 5 robot berpikir bahwa koordinat yang dilaluinya sudah benar karena data yang diberikan sensor sensor menunjukkan data demikian, tetapi jika dilihat pada kenyataan di lapangan datanya menjadi berbeda. Kesalahan tersebut akibat dari pembacaan sensor adns 5050 yang membaca permukaan yang berbeda warna atau texture. Selain dari faktor warna permukaan yang tidak sama adapun faktor dari tinggi permukaan terhadap sensor yang berbeda dan kecepatan robot yang berubah secara tiba-tiba dapat mempengaruhi pembacaan sensor optical mouse adns 5050, sehingga data yang didapatkan tidak seperti seharusnya.Terdapat trial pada robot saat posisi robot bergerak menuju target yang terlihat pada tabel 2 menunjukkan robot bergerak sesuai target yang dituju.
Tabel 2 Posisi Robot Meunuju Target
Trial ke Gerakan PosisiX(cm) PosisiY(cm)
1 1 1 27 2 28 27.5 3 26 50 4 50 56 2 1 2 29 2 28 31 3 26 57 4 52 55 3 1 2 28 2 27 27.3 3 27 57 4 55 58 4 1 0 28 2 27 29 3 27.7 58 4 56 57 5 1 -1 31 2 28 30 3 27 57 4 57 57
Untuk menguji keakurasian dua sensor dengan satu sensor dilakukan 2 mcam percobaan. Percobaan pertama sudut arah hadap robot 0 derajat dan pada percobaan kedua 10 derajat.
Data – data tersebut ditunjukkan pada tabel 3 dan tabel 4 Pada Gambar 6 adalah gambar koordinat yang dibaca oleh robot.
Tabel 3 Sudut awal robot 0 derajat
Trial ke Target X(cm) Target Y(cm)
Satu sensor Dua sensor
Error satu sensor % Error dua sensor % Posisi X(cm) Posisi Y(cm) Posisi X(cm) Posisi Y(cm) 1 0 75 4 78 2 78.5 3.5 2.75 2 0 75 -1 81 2 78 2.5 2.5 3 0 75 3 78 1.5 78 3 2.25 4 0 75 1.5 79 2 79 2.5 3 5 0 75 4 76 1 78.5 2.5 2.25 Rata 2.8 2.55
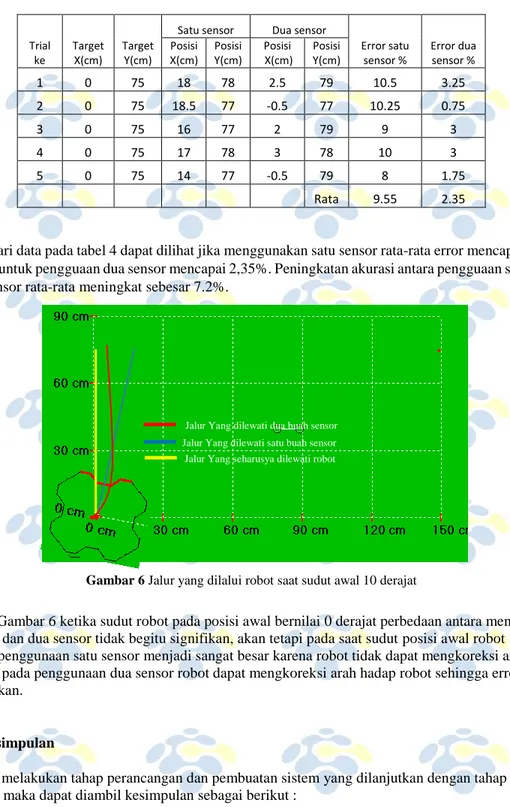
Tabel 4 Sudut awal robot 10 derajat Trial ke Target X(cm) Target Y(cm)
Satu sensor Dua sensor
Error satu sensor % Error dua sensor % Posisi X(cm) Posisi Y(cm) Posisi X(cm) Posisi Y(cm) 1 0 75 18 78 2.5 79 10.5 3.25 2 0 75 18.5 77 -0.5 77 10.25 0.75 3 0 75 16 77 2 79 9 3 4 0 75 17 78 3 78 10 3 5 0 75 14 77 -0.5 79 8 1.75 Rata 9.55 2.35
Dari data pada tabel 4 dapat dilihat jika menggunakan satu sensor rata-rata error mencapai 9.55%, sedangkan untuk pengguaan dua sensor mencapai 2,35%. Peningkatan akurasi antara pengguaan satu sensor dan dua sensor rata-rata meningkat sebesar 7.2%.
Gambar 6 Jalur yang dilalui robot saat sudut awal 10 derajat
pada Gambar 6 ketika sudut robot pada posisi awal bernilai 0 derajat perbedaan antara menggunkan satu sensor dan dua sensor tidak begitu signifikan, akan tetapi pada saat sudut posisi awal robot 10 derajat error pada penggunaan satu sensor menjadi sangat besar karena robot tidak dapat mengkoreksi arah sudut. Sedangkan pada penggunaan dua sensor robot dapat mengkoreksi arah hadap robot sehingga error dapat di minimalkan.
4. Kesimpulan
Setelah melakukan tahap perancangan dan pembuatan sistem yang dilanjutkan dengan tahap pengujian dan analisa maka dapat diambil kesimpulan sebagai berikut :
1. Pencapaian robot dalam menuju target dengan navigasi yang menggunakan multi sensor optical mouse rata-rata memiliki error sebesar 5%.
2. Penggunaan multi sensor optical mouse dapat meningkatkan akurasi sebesar 6% dari penggunaan satu sensor optical mouse.
Jalur Yang dilewati dua buah sensor Jalur Yang dilewati satu buah sensor Jalur Yang seharusya dilewati robot
Referensi
[1] Rizal,Perancangan Robot Omnidirectional Menuju Target Berbasis Prinsip Dead Reckoning Empat Tetikus Optik, Jakarta, 2012
[2] Daisuke Sekimori, Precise Dead-Reckoning For Mobile Robots Using Multiple Optical Mouse Sensors, Japan
[3] Andrea Bonarini, Dead Reckoning For Mobile Robots Using Two Optical Mice, Politecnico di Milano, 2013
[4] Irfan Affandi, Kontrol Posisi Robot Omni-Directional Menggunakan Metode Gyrodometry, Politeknik Elektronika Negeri Surabaya, 2013
[5] Jusuf Dwi Kariyanto, Navigasi Mobile Robot Berbasis Trajektori dan Odometry dengan Pemulihan Jalur Secara Otomatis, Politeknik Elektronika Negeri Surabaya, 2010
[6] A. Fernando , W.Rahardhita , A.S. Romadhon Mohammad, “Implementasi sensor gyro untuk heading lock pada robot omnidirectional,” Indonesia Symposium on Robot Soccer Competition, June 2013.