Autonomous Follower Transport
Menggunakan Robot Quaddruped
Adenta Ramaladi, Dr.Tri Arief Sardjono, ST. MT , Dr. Muhammad Rivai, ST. MT
Jurusan Teknik Elektro FTI-ITS
Abstrak - Teknologi robotika memang suatuteknologi yang saat ini mulai banyak diimplementasikan untuk berbagai keperluan. Robot beroperasi secara otomatis sesuai dengan pemberian parameter yang ditetapkan.
Barang yang begitu berat sulit untuk dipindahkan dengan menggunakan tenaga manusia, sehingga diperlukan alat pengangkut semacam troli. Hal ini tidak efisien karena tidak semua orang kuat untuk mendorong troli dengan barang bawaan yang berat. Perancangan robot berfungsi untuk meringankan pekerjaan manusia, salah satu contohnya adalah membantu membawakan barang-barang bawaannya. Untuk mengatasi permasalahan tersebut dirancang autonomous follower transport menggunakan sensor infra merah.
Robot yang dirancang ini hanya dapat bekerja jika pemancar infra merah yang digunakan mempunyai pancaran sinar dengan frekuensi carrier lebih besar dari 1 KHz. Robot autonomous follower transport ini dapat bergerak mengikuti pemegang pemancar infra merah yang berada pada jarak tidak lebih dari 3 meter dan masih berada pada sudut yang tidak lebih dari 90º kearah kanan dan 90º kearah kiri dengan sudut 0º berada tepat di depan robot.
Kata Kunci : Autonomous Follower Transport, Robot, Infra Merah.
I. PENDAHULUAN
Teknologi saat ini sudah mendekati serba otomatis, dimana hampir semua aspek mengimplementasikan dengan peralatan elektronik. Peralatan – peralatan elektronik sangat membantu manusia untuk melakukan hal-hal yang awalnya berat menjadi ringan. Pada tugas akhir ini mencoba untuk mengimplementasikan robot yang bisa mengikuti sinar infra merah, dimana sinar itu dimanfaatkan untuk menarik robot agar selalu mengikuti sinar tersebut. Alasan utama untuk menggunakan robot Quadruped (berkaki empat) dibandingkan dengan menggunakan robot beroda dan robot berkaki enamadalah sebagai berikut :
Kelebihan robot berkaki 4 daripada beroda :
- Robot berkaki 4 bisa melewati bebatuan kecil,
pasir, dan air yang tinggi max ¼ .
- tinggi kakinya. Sedangkan robot beroda tidak
bisa melewati air karena bagian motor pada rodanya akan rusak.
Kelebihan robot berkaki 4 daripada berkaki 6 : -
- Robot berkaki 4 lebih sederhana untuk
algoritma berjalannya. Sedangkan robot berkaki 6 lebih rumit untuk algoritma berjalannya.
- Robot berkaki 4 lebih hemat daya, karena
sumber tegangan hanya perlu memberi suply ke 8 servo saja. Jika menggunakan robot berkaki 6, sumber tegangan bisa mensupply 12 servo atau 18 servo sehingga membutuhkan supply yang besar.
Robot quadruped ini difungsikan sebagai suatu alat yang bisa berjalan sendiri mengikuti si pemilik sumber sinyal infrared tersebut sehingga Si pemegang sumber sinyal tidak perlu membawa robot kesana kemari. Si pemegang Sumber sinyal cukup membawa IR Transmitter berukuran kecil yang mengirimkan gelombang infra merah secara terus-menerus, sehingga IR Receiver yang ada pada robot juga melakukan chacking dari arah manakah gelombang infrared itu datang (dengan menggunakan kelima sensor penerima yang terpasang pada robot) dan berapa jauhkah sumber
infrared dengan IR Receiver yang dipasang pada
robot (menggunakan daya yang ditangkap oleh IR
Receiver yang akan di umpankan ke ADC
mikrokontroler).
II. TEORI PENUNJANG
Pada bagian ini akan dijelaskan sedikit tentang teori-teori penunjang yang dapat membantu menyelesaikan perancangan ini.
A. Module Pemancar Infra Merah
Pemancar infra merah adalah komponen elektronik yang memancarakan sinar infra merah. Komponen ini berbentuk seperti LED biasa hanya saja sinar yang dipancarkan bukanlah sinar tampak, melainkan sinar yang tidak dapat dilihat oleh mata.
Biasanya gelombang yang dipancarkan untuk bisa ditangkap oleh sensor penerima infra merah (photodioda) dengan baik adalah gelombang yang sudah dimodulasi karena dengan memodulasi sinar yang dipancarkan bisa dipisah dengan cahaya matahari yang bentuk gelombangnya adalah gelombang DC. Pada perancangan ini gelombang yang dikirim adalah gelombang kotak (square wave) karena target akhir yang ingin di dapat adalah amplitudo gelombang.
Membuat gelombang kotak yaitu menggunakan IC NE555 yang dirancang sebagai astabil multivibrator. Pada rangkaian astabil multivibrator frekuensi di atur sesuai dengan keinginan perancang. Rangkaian ini adalah rangkaian modullasi sinyal, dimana mengubah sinyal DC menjadi sinyal kotak.
Keluaran dari rangkaian astabil multivibrator dihubungkan dengan transistor
switching sebelum terhubung dengan LED pemancar
infra merah. Skematik modul pemancar ditunjukkan pada gambar 2.2.
Gambar 2.2 Skemaik infra merah B. Modul Penerima Infra Merah
Penerima infra merah adalah komponen elektronik yang menerima stimulus berupa cahaya. Cahaya yang dapat ditangkap tidak hanya gelombang infra merah melainkan juga dapat menangkap stimulus berupa sinar tampak seperti lampu atau sinar matahari.
Penerima infra merah yang dirancang terdiri dari 4 komponen yang mempunya fungsi masing-masing. Komponen-komponen tersebut adalah : 1. Rangkaian photodiode
2. Rangkaian high pass filter
3. Rangkaian penguat tegangan
4. Rangkaian demodulator
Rangkaian demodulator adalah rangkaian yang mengubah sinyal yang telah dimodulasi menjadi sinyal DC.
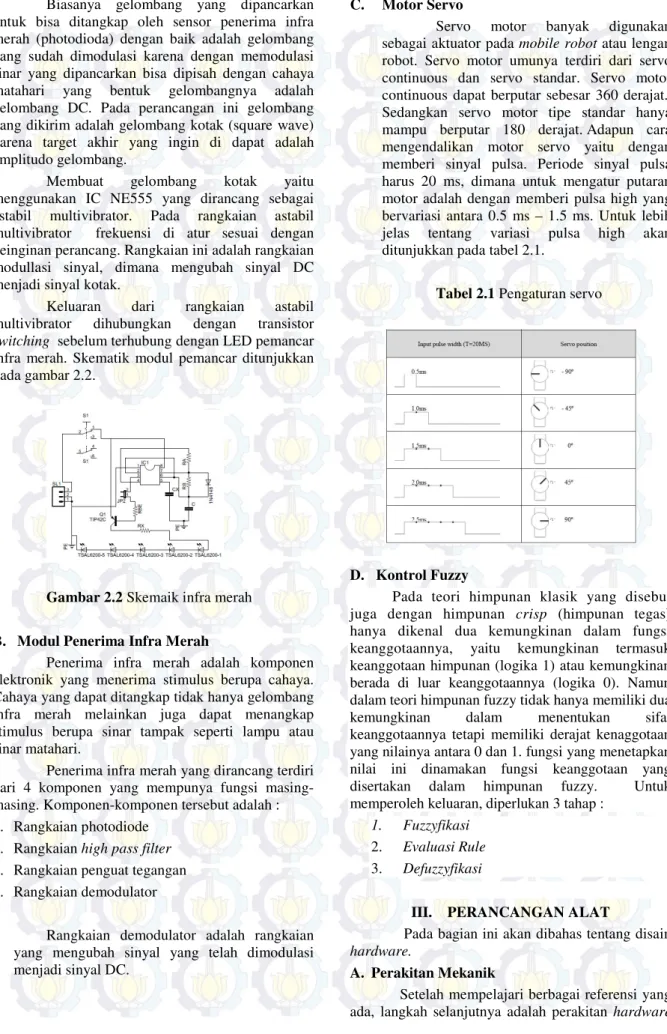
C. Motor Servo
Servo motor banyak digunakan sebagai aktuator pada mobile robot atau lengan robot. Servo motor umunya terdiri dari servo continuous dan servo standar. Servo motor continuous dapat berputar sebesar 360 derajat. Sedangkan servo motor tipe standar hanya mampu berputar 180 derajat. Adapun cara mengendalikan motor servo yaitu dengan memberi sinyal pulsa. Periode sinyal pulsa harus 20 ms, dimana untuk mengatur putaran motor adalah dengan memberi pulsa high yang bervariasi antara 0.5 ms – 1.5 ms. Untuk lebih jelas tentang variasi pulsa high akan ditunjukkan pada tabel 2.1.
Tabel 2.1 Pengaturan servo
D. Kontrol Fuzzy
Pada teori himpunan klasik yang disebut juga dengan himpunan crisp (himpunan tegas) hanya dikenal dua kemungkinan dalam fungsi keanggotaannya, yaitu kemungkinan termasuk keanggotaan himpunan (logika 1) atau kemungkinan berada di luar keanggotaannya (logika 0). Namun dalam teori himpunan fuzzy tidak hanya memiliki dua kemungkinan dalam menentukan sifat keanggotaannya tetapi memiliki derajat kenaggotaan yang nilainya antara 0 dan 1. fungsi yang menetapkan nilai ini dinamakan fungsi keanggotaan yang disertakan dalam himpunan fuzzy. Untuk memperoleh keluaran, diperlukan 3 tahap :
1. Fuzzyfikasi
2. Evaluasi Rule
3. Defuzzyfikasi
III. PERANCANGAN ALAT
Pada bagian ini akan dibahas tentang disain
hardware.
A. Perakitan Mekanik
Setelah mempelajari berbagai referensi yang ada, langkah selanjutnya adalah perakitan hardware
robot secara keseluruhan. Dalam perancangan
hardware dibagi menjadi beberapa bagian utama,
yaitu : desain sensor transmitter infra merah, desain
receiver infra merah, dan desain sistem minimum.
Untuk mendesain hardware robot digunakan
software Eagle. Keuntungan dari penggunaan software ini adalah lebih familiar, mudah dalam
pengoperasiannya, library komponen yang tersedia juga lebih lengkap.
Gambar 3.1 Mekanik robot
B. Desain Pemancar Infra Merah
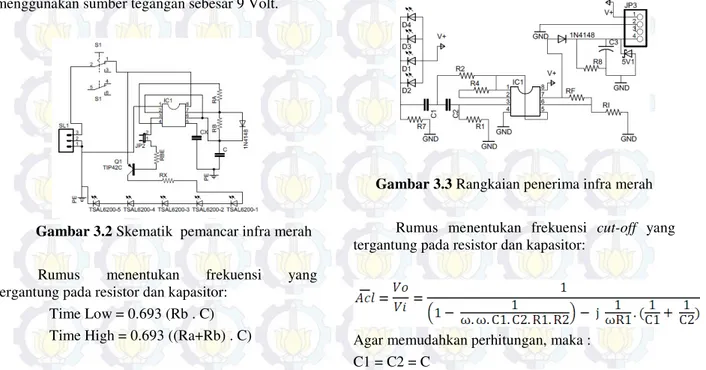
Radiasi infra merah yang dihasilkan oleh tiga buah dioda lampu LED (Light Emitting Diode) infra merah D1, D2, D3, D4, dan D5. Ketika LED ini dihidupkan akan memberikan kilatan cahaya yang sangat singkat, namun dengan intesitas cahaya yang sangat tinggi. Ini akan lebih mudah dideteksi pada jangkauan yang lebih jauh. Dasar rangkaian pemancar ini dengan menggunakan sebuah IC NE 555 yang berfungsi sebagai astabil multivibrator. Pada kapasitor CI mengisi muatan melalui resistor R. Output pada IC (pin 3) dihubungkan dengan resistor yang kemudian di umpankan k basis transistor power tipe PNP (TIP 42). Resistor R1 berfungsi sebagai pembatas arus, sehingga arus yang melewati D1, D2, D3 tidak terlalu besar. Rangkaian pemancar ini menggunakan sumber tegangan sebesar 9 Volt.
Gambar 3.2 Skematik pemancar infra merah Rumus menentukan frekuensi yang tergantung pada resistor dan kapasitor:
Time Low = 0.693 (Rb . C) Time High = 0.693 ((Ra+Rb) . C)
Pada perancangan ini Rb di pararel dengan diode sehingga rumus “Time High” menjadi
Time High = 0.693 (Ra . C) Frekuensi = 1 / (Time High + Time Low)
Pada Perancangan ini ditentukan C, Ra, dan Rb untuk menentukan frekuensi dengan Duty Cycle > 50% dengan tujuan menghemat daya.
Dari nilai komponen di samping ini saat di masukkan dalam rumus di atas maka di dapat frekuensi.
TH = 0.693 (1.5 K x 100nF) = 1.04 x 10-4
TL = 0.693 (560 x 100nF) = 0.39 x 10-4
f = 1/(TH+TL) = 1/1.43x10-4 = 6993 Hz
C. Disain Penerima Infra Merah
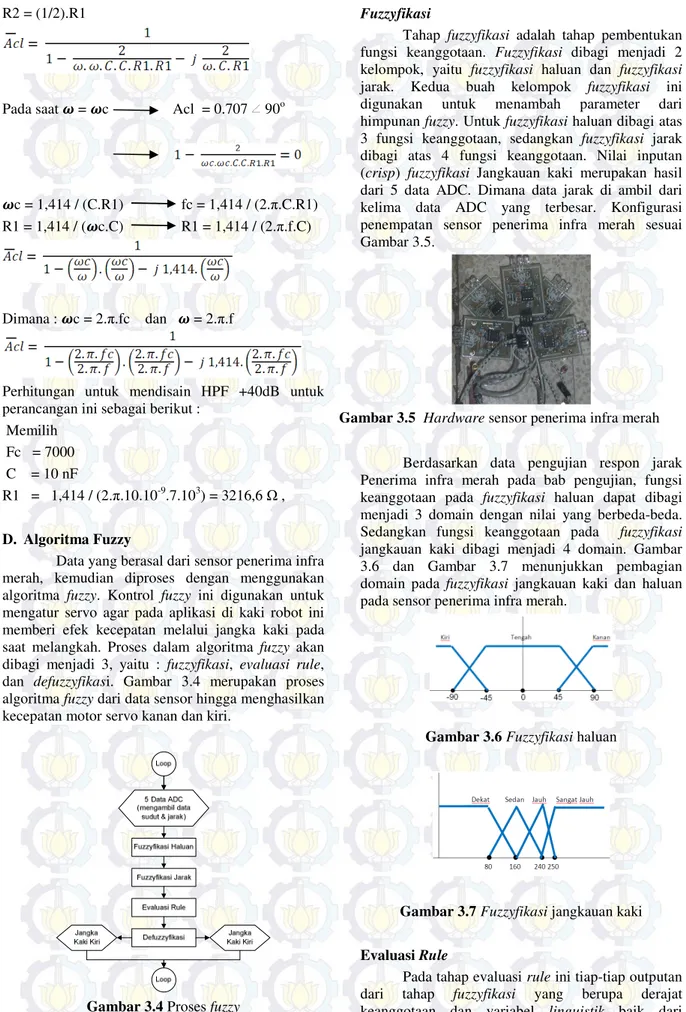
Pada rangkaian penerima digunakan photo diode yang dipasang reverse dan di seri dengan resistor. Fungsi photodioda adalah untuk menerima intensitas cahaya yang dipancarkan oleh pemancar infra merah, sedangkan resistor yang diseri dengan photodiode berfungsi untuk mengkonversi arus menjadi tegangan. Setelah itu tegangan tersebut difilter oleh High Pass Filter (HPF) untuk menghilangkan sinyal DC yang timbul akibat sinar lampu atau matahari. Keluaran dari HPF berupa sinyal clock dengan frekuensi 6 KHz (sama dengan frekuensi cahaya yang keluar dari pemancar) dan sinyalnya sangat kecil sehingga butuh penguatan yang sangat besar agar dapat diproses lagi. Ranjgkaian penerima infra merah dapat dilihat pada gambar 3.3.
Gambar 3.3 Rangkaian penerima infra merah Rumus menentukan frekuensi cut-off yang tergantung pada resistor dan kapasitor:
Agar memudahkan perhitungan, maka : C1 = C2 = C
C = 100nF Ra= 1.5 K Rb= 560
R2 = (1/2).R1
Pada saat = c Acl = 0.707 90o
c = 1,414 / (C.R1) fc = 1,414 / (2. .C.R1) R1 = 1,414 / ( c.C) R1 = 1,414 / (2. .f.C)
Dimana : c = 2. .fc dan = 2. .f
Perhitungan untuk mendisain HPF +40dB untuk perancangan ini sebagai berikut :
Memilih Fc = 7000 C = 10 nF
R1 = 1,414 / (2. .10.10-9.7.103) = 3216,6 ,
D. Algoritma Fuzzy
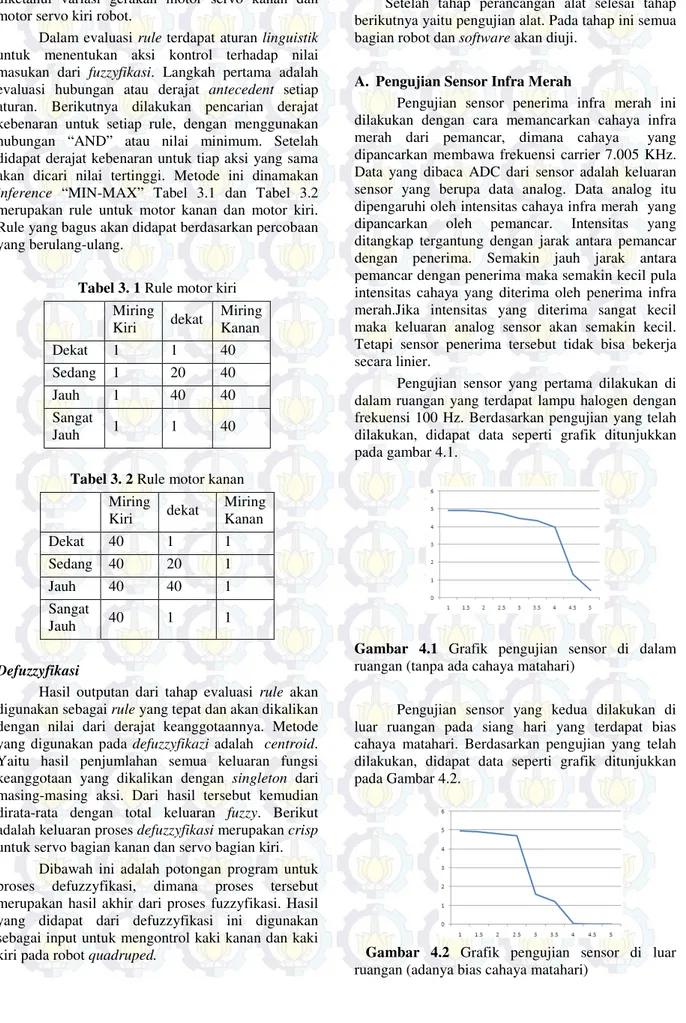
Data yang berasal dari sensor penerima infra merah, kemudian diproses dengan menggunakan algoritma fuzzy. Kontrol fuzzy ini digunakan untuk mengatur servo agar pada aplikasi di kaki robot ini memberi efek kecepatan melalui jangka kaki pada saat melangkah. Proses dalam algoritma fuzzy akan dibagi menjadi 3, yaitu : fuzzyfikasi, evaluasi rule, dan defuzzyfikasi. Gambar 3.4 merupakan proses algoritma fuzzy dari data sensor hingga menghasilkan kecepatan motor servo kanan dan kiri.
Gambar 3.4 Proses fuzzy
Fuzzyfikasi
Tahap fuzzyfikasi adalah tahap pembentukan fungsi keanggotaan. Fuzzyfikasi dibagi menjadi 2 kelompok, yaitu fuzzyfikasi haluan dan fuzzyfikasi jarak. Kedua buah kelompok fuzzyfikasi ini digunakan untuk menambah parameter dari himpunan fuzzy. Untuk fuzzyfikasi haluan dibagi atas 3 fungsi keanggotaan, sedangkan fuzzyfikasi jarak dibagi atas 4 fungsi keanggotaan. Nilai inputan (crisp) fuzzyfikasi Jangkauan kaki merupakan hasil dari 5 data ADC. Dimana data jarak di ambil dari kelima data ADC yang terbesar. Konfigurasi penempatan sensor penerima infra merah sesuai Gambar 3.5.
Gambar 3.5 Hardware sensor penerima infra merah Berdasarkan data pengujian respon jarak Penerima infra merah pada bab pengujian, fungsi keanggotaan pada fuzzyfikasi haluan dapat dibagi menjadi 3 domain dengan nilai yang berbeda-beda. Sedangkan fungsi keanggotaan pada fuzzyfikasi jangkauan kaki dibagi menjadi 4 domain. Gambar 3.6 dan Gambar 3.7 menunjukkan pembagian domain pada fuzzyfikasi jangkauan kaki dan haluan pada sensor penerima infra merah.
Gambar 3.6 Fuzzyfikasi haluan
Gambar 3.7 Fuzzyfikasi jangkauan kaki Evaluasi Rule
Pada tahap evaluasi rule ini tiap-tiap outputan dari tahap fuzzyfikasi yang berupa derajat keanggotaan dan variabel linguistik baik dari
kecepatan ataupun haluan akan digabung dengan menggunakan evaluasi rule. Dari evaluasi rule akan diketahui variasi gerakan motor servo kanan dan motor servo kiri robot.
Dalam evaluasi rule terdapat aturan linguistik untuk menentukan aksi kontrol terhadap nilai masukan dari fuzzyfikasi. Langkah pertama adalah evaluasi hubungan atau derajat antecedent setiap aturan. Berikutnya dilakukan pencarian derajat kebenaran untuk setiap rule, dengan menggunakan hubungan “AND” atau nilai minimum. Setelah didapat derajat kebenaran untuk tiap aksi yang sama akan dicari nilai tertinggi. Metode ini dinamakan
inference “MIN-MAX” Tabel 3.1 dan Tabel 3.2
merupakan rule untuk motor kanan dan motor kiri. Rule yang bagus akan didapat berdasarkan percobaan yang berulang-ulang.
Tabel 3. 1 Rule motor kiri Miring
Kiri dekat Miring Kanan
Dekat 1 1 40
Sedang 1 20 40
Jauh 1 40 40
Sangat
Jauh 1 1 40
Tabel 3. 2 Rule motor kanan Miring
Kiri dekat Miring Kanan
Dekat 40 1 1 Sedang 40 20 1 Jauh 40 40 1 Sangat Jauh 40 1 1 Defuzzyfikasi
Hasil outputan dari tahap evaluasi rule akan digunakan sebagai rule yang tepat dan akan dikalikan dengan nilai dari derajat keanggotaannya. Metode yang digunakan pada defuzzyfikazi adalah centroid. Yaitu hasil penjumlahan semua keluaran fungsi keanggotaan yang dikalikan dengan singleton dari masing-masing aksi. Dari hasil tersebut kemudian dirata-rata dengan total keluaran fuzzy. Berikut adalah keluaran proses defuzzyfikasi merupakan crisp untuk servo bagian kanan dan servo bagian kiri.
Dibawah ini adalah potongan program untuk proses defuzzyfikasi, dimana proses tersebut merupakan hasil akhir dari proses fuzzyfikasi. Hasil yang didapat dari defuzzyfikasi ini digunakan sebagai input untuk mengontrol kaki kanan dan kaki kiri pada robot quadruped.
IV. PENGUJIAN ALAT DAN PENGAMBILAN DATA
Setelah tahap perancangan alat selesai tahap berikutnya yaitu pengujian alat. Pada tahap ini semua bagian robot dan software akan diuji.
A. Pengujian Sensor Infra Merah
Pengujian sensor penerima infra merah ini dilakukan dengan cara memancarkan cahaya infra merah dari pemancar, dimana cahaya yang dipancarkan membawa frekuensi carrier 7.005 KHz. Data yang dibaca ADC dari sensor adalah keluaran sensor yang berupa data analog. Data analog itu dipengaruhi oleh intensitas cahaya infra merah yang dipancarkan oleh pemancar. Intensitas yang ditangkap tergantung dengan jarak antara pemancar dengan penerima. Semakin jauh jarak antara pemancar dengan penerima maka semakin kecil pula intensitas cahaya yang diterima oleh penerima infra merah.Jika intensitas yang diterima sangat kecil maka keluaran analog sensor akan semakin kecil. Tetapi sensor penerima tersebut tidak bisa bekerja secara linier.
Pengujian sensor yang pertama dilakukan di dalam ruangan yang terdapat lampu halogen dengan frekuensi 100 Hz. Berdasarkan pengujian yang telah dilakukan, didapat data seperti grafik ditunjukkan pada gambar 4.1.
Gambar 4.1 Grafik pengujian sensor di dalam ruangan (tanpa ada cahaya matahari)
Pengujian sensor yang kedua dilakukan di luar ruangan pada siang hari yang terdapat bias cahaya matahari. Berdasarkan pengujian yang telah dilakukan, didapat data seperti grafik ditunjukkan pada Gambar 4.2.
Gambar 4.2 Grafik pengujian sensor di luar ruangan (adanya bias cahaya matahari)
B. Pengujian Kontrol Fuzzy
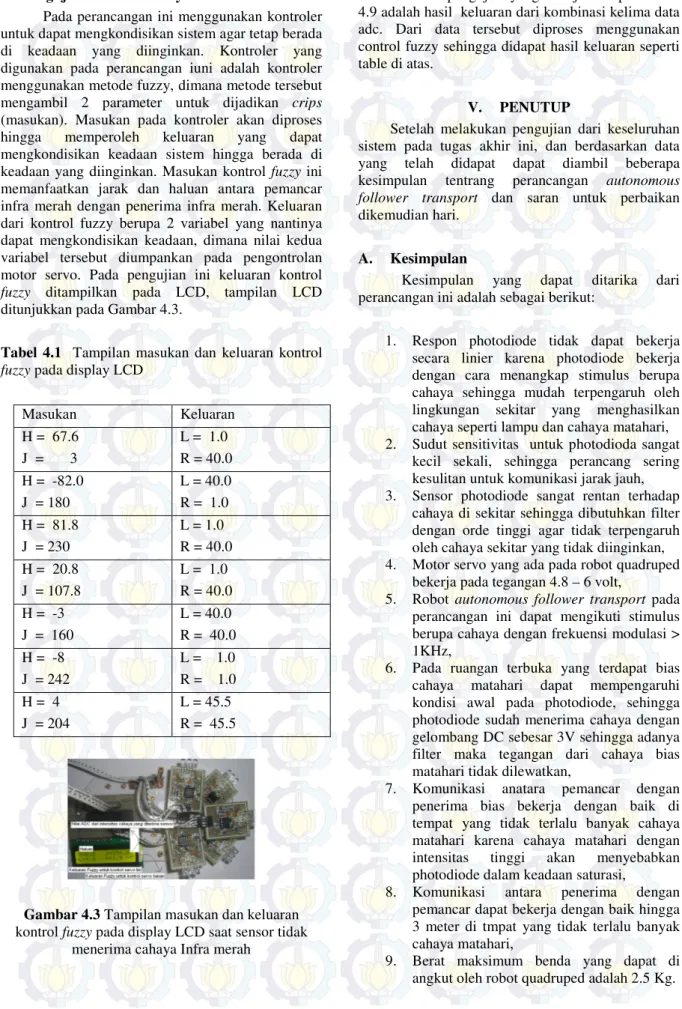
Pada perancangan ini menggunakan kontroler untuk dapat mengkondisikan sistem agar tetap berada di keadaan yang diinginkan. Kontroler yang digunakan pada perancangan iuni adalah kontroler menggunakan metode fuzzy, dimana metode tersebut mengambil 2 parameter untuk dijadikan crips (masukan). Masukan pada kontroler akan diproses hingga memperoleh keluaran yang dapat mengkondisikan keadaan sistem hingga berada di keadaan yang diinginkan. Masukan kontrol fuzzy ini memanfaatkan jarak dan haluan antara pemancar infra merah dengan penerima infra merah. Keluaran dari kontrol fuzzy berupa 2 variabel yang nantinya dapat mengkondisikan keadaan, dimana nilai kedua variabel tersebut diumpankan pada pengontrolan motor servo. Pada pengujian ini keluaran kontrol
fuzzy ditampilkan pada LCD, tampilan LCD
ditunjukkan pada Gambar 4.3.
Tabel 4.1 Tampilan masukan dan keluaran kontrol
fuzzy pada display LCD
Masukan Keluaran H = 67.6 J = 3 L = 1.0 R = 40.0 H = -82.0 J = 180 L = 40.0 R = 1.0 H = 81.8 J = 230 L = 1.0 R = 40.0 H = 20.8 J = 107.8 L = 1.0 R = 40.0 H = -3 J = 160 L = 40.0 R = 40.0 H = -8 J = 242 L = 1.0 R = 1.0 H = 4 J = 204 L = 45.5 R = 45.5
Gambar 4.3 Tampilan masukan dan keluaran kontrol fuzzy pada display LCD saat sensor tidak
menerima cahaya Infra merah
Hasil pengujian yang ditunjukkan pada table 4.9 adalah hasil keluaran dari kombinasi kelima data adc. Dari data tersebut diproses menggunakan control fuzzy sehingga didapat hasil keluaran seperti table di atas.
V. PENUTUP
Setelah melakukan pengujian dari keseluruhan sistem pada tugas akhir ini, dan berdasarkan data yang telah didapat dapat diambil beberapa kesimpulan tentrang perancangan autonomous
follower transport dan saran untuk perbaikan
dikemudian hari. A. Kesimpulan
Kesimpulan yang dapat ditarika dari perancangan ini adalah sebagai berikut:
1. Respon photodiode tidak dapat bekerja
secara linier karena photodiode bekerja dengan cara menangkap stimulus berupa cahaya sehingga mudah terpengaruh oleh lingkungan sekitar yang menghasilkan cahaya seperti lampu dan cahaya matahari, 2. Sudut sensitivitas untuk photodioda sangat
kecil sekali, sehingga perancang sering kesulitan untuk komunikasi jarak jauh, 3. Sensor photodiode sangat rentan terhadap
cahaya di sekitar sehingga dibutuhkan filter dengan orde tinggi agar tidak terpengaruh oleh cahaya sekitar yang tidak diinginkan, 4. Motor servo yang ada pada robot quadruped
bekerja pada tegangan 4.8 – 6 volt,
5. Robot autonomous follower transport pada
perancangan ini dapat mengikuti stimulus berupa cahaya dengan frekuensi modulasi > 1KHz,
6. Pada ruangan terbuka yang terdapat bias
cahaya matahari dapat mempengaruhi kondisi awal pada photodiode, sehingga photodiode sudah menerima cahaya dengan gelombang DC sebesar 3V sehingga adanya filter maka tegangan dari cahaya bias matahari tidak dilewatkan,
7. Komunikasi anatara pemancar dengan
penerima bias bekerja dengan baik di tempat yang tidak terlalu banyak cahaya matahari karena cahaya matahari dengan intensitas tinggi akan menyebabkan photodiode dalam keadaan saturasi,
8. Komunikasi antara penerima dengan
pemancar dapat bekerja dengan baik hingga 3 meter di tmpat yang tidak terlalu banyak cahaya matahari,
9. Berat maksimum benda yang dapat di
B. Saran
Saran-saran yang dapat diberikan untuk pengembangan tugas akhir ini sebagai berikut :
1. Rangkaian sensor pemancar infra merah
diberi LED pemancar sebanyak 12 LED yang dipasang menghadap arah yang berbeda agar saat komunikasi jarak jauh sensor penerima infra merah tidak mudah kehilangan cahaya dari pemancar,
2. Robot autonomous follower transport akan
lebih baik menggunakan robot beroda, karena robot beroda kecepatannya lebih tinggi daripada robot berkaki,
3. Sensor penerima infra merah akan lebih baik
menggunakan phototransistor karena arus yang bekerja jauh lebih besar daripada photodiode,
4.
Perancangan robot autonomous followertransport yang lebih dari satu akan lebih baik
jika masing-masing robot mempunyai kode data yang berbeda pada pemancarnya dan penerimanya pun harus bias menyeleksi kode yang akan diproses sehingga pemancar yang satu tidak mempengaruhi robot yang lainnya. REVERENSI
[1] Maulina Tanjung, 2009, ”Analisis Sistem Sensor Infra Merah”, medan
[2] Hermawan Ali, 2010, ’’Infra Merah Pada Remote Control’’, Gramedia, Bandung. [3] Hermawan Ali, 2009, ’‘Sistem Sensor
Infra Merah‘‘, Gramedia, Bandung. [4] Simatupang Ray, 11 Mei 2010, “Rangkaian
Elektronika Remote Control IR”, <http ://www.elektronikamodern.com/
rangkaianinframerah.html, Riau>
[5] , infra red transmitter and receiver. Diakses tanggal 11 Mei 2009. <www.innovativeelectronics.com>
[6] …………, 2000, “A Single-Supply Op-Amp Circuit Collection”, Instruments
Incorporated, Texas.
[7] …………, 2001, “Filter Design in Thirty Seconds”, Instruments Incorporated, Texas.
[8] …………, “Operational amplifier high pass filter”, <www.Radio-Electronics.com>.
RIWAYAT HIDUP PENULIS
Penulis dilahirkan di Surabaya pada tanggal 15 April 1988 bernama Adenta Ramaladi. Putra pertama dari dua bersaudara. Selama menjadi mahasiswa penulis aktif sebagai \asisten laboratorium pemrograman dan kegiatan himpunan ketika menjalani perkuliahan di D3 Teknik Elektro. Pada saat menjalani perkuliahan di S1 Teknik Elektro ITS, penulis lebih memfokuskan pada perkuliahan.
Riwayat Pendidikan :
o Teknik Elektro ITS Surabaya , pada tahun
2009.
o D3 Teknik Elektro ITS Surabaya pada
tahun 2006 – 2009.
o SMAN 6 Surabaya, pada tahun 2003 –
2006.
o SMPN 33 Surabaya, pada tahun 2000 –
2003.
o SDN Sawahan IX Surabaya, pada tahun
![Gambar 2.1 LED pemancar infra merah [2]](https://thumb-ap.123doks.com/thumbv2/123dok/4665999.3421968/1.892.95.782.106.1133/gambar-led-pemancar-infra-merah.webp)