PEMODELAN TOMOGRAFI WAKTU TEMPUH DENGAN KONFIGURASI CROSSHOLE
SEISMIC PADA KASUS DATA SINTETIK
Muhamad Reza Noviardi1, Prof. Dr. rer. nat. Awali Priyono1
1
Insitut Teknologi Bandung, 40132, Bandung, Indonesia
Abstrak
Dalam survey seismik antar sumur, pemilihan parameter akuisisi yang baik sangat diperlukan untuk mendapatkan hasil data seismik yang optimal. Terutama dalam melakukan pencitraan tomografi seismik waktu tempuh, diperlukan data seismik yang punya kepadatan sinar yang baik di tiap bagian dari area survey. Untuk itu, diperlukan suatu pemodelan sintetik untuk melihat hubungan antara parameter akusisi, jalur rambat gelombang, waktu tiba gelombang, serta hasil inversi waktu tempuhnya. Pada penelitian ini dilakukan pemodelan tomografi ke depan dan ke belakang dengan konfigurasi antar sumur. Data yang digunakan adalah data sintetik hasil pemodelan ke depan. Metode yang dilakukan adalah penjejakan gelombang dengan metode
ray bending, selanjutnya dilakukan inversi waktu tempuh dengan menggunakan tomografi waktu tunda. Hasilnya menunjukkan bahwa perubahan parameter jarak antar sumur, interval sumber dan receiver, ukuran blok pada model dan sampling rate mempengaruhi hasil inversinya. Di sisi lain, penukaran letak sumur sumber dan receiver serta pengubahan nilai frekuensi sumber tidak mempengaruhi hasil inversi pada percobaan sintetik.
Kata kunci: pemodelan sintetik, seismik antar sumur, tomografi seismik waktu tempuh, parameter akuisisi
I. PENDAHULUAN
Dalam tomografi seismik, diperlukan data dengan kepadatan sinar yang baik yang melewati seluruh blok pada model agar semua area pada model dapat tercitrakan dengan baik. Oleh karena itu, diperlukan suatu pemodelan sintetik untuk melihat pengaruh parameter dan geometri akuisisi terhadap jalur rambat gelombang, yang nanti akan berpengaruh pula pada tomogram hasil inversi. Pemilihan parameter akuisisi yang baik akan dapat menghasilkan data yang baik sehingga pencitraan model kecepatan bawah permukaan dengan tomografi waktu tempuh semakin optimal.
II. TEORI DASAR
Tomografi waktu tempuh adalah jenis tomografi yang merekonstruksi model kecepatan bawah permukaan dengan data waktu tempuh gelombang seismik dari sumber ke receiver. Dalam tomografi waktu tempuh, dilakukan parameterisasi model, yaitu pembagian area survey menjadi sejumlah blok dengan ukuran tertentu. Kemudian gelombang seismik dari sumber merambat menuju receiver dan membentuk jalur rambat yang melewati beberapa blok, dan didapatkan waktu tempuh gelombang serta panjang raypath di tiap blok, yang hubungannya dapat dinyatakan dengan persamaan
∑ (1)
Kumpulan persamaan tersebut dapat dinyatakan dalam bentuk matriks
(2)
Dimana t adalah matriks waktu tempuh, M adalah matriks Kernel berisi parameter model, dan s adalah matriks slowness.
Namun persamaan tomografi sangat nonlinear akibat banyaknya parameter unknown pada persamaannya. Oleh karena itu, dilakukan proses linearisasi dengan cara tomografi waktu tunda. Dengan menganggap suatu model awal V0, dilakukan ray tracing sehingga didapatkan panjang
raypath dan waktu tempuh kalkulasi tcal. Nilai tcal tersebut dikurang dengan waktu tempuh observasi tobs sehingga didapatkan selisih waktu δt. Nilai tersebut dimasukkan dalam persamaan matriks tomografi waktu tempuh melakukan update model kecepatan. Dengan menurunkan rumus
(5)
dengan i adalah jumlah iterasi yang dilakukan.
III. PEMODELAN DAN PENGOLAHAN
DATA
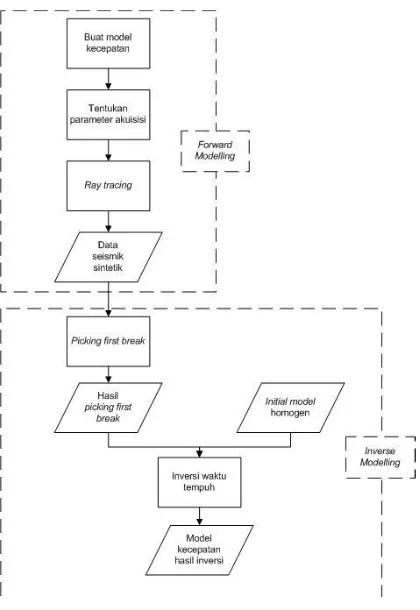
Penelitian ini secara umum terbagi menjadi dua bagian, yaitu forward modelling dan inverse modelling. Tahapan pada masing-masing pemodelan dapat dilihat pada diagram alir ini. Adapun pada penelitian ini, pemodelan dilakukan dengan perangkat lunak TomoXPro
Gambar 1. Diagram alir pemodelan
Pertama-tama, dibuat model kecepatan sesuai dengan yang diinginkan. Kemudian, dilakukan pengaturan parameter serta geometri akuisisi,
seperti jarak dan posisi antar sumur, interval serta jumlah source dan receiver. Selanjutnya pada model tersebut dilakukan ray tracing sehingga didapatkan data seismik sintetiknya. Pada data sintetik tersebut, dilakukan picking first break
sehingga didapatkan waktu tempuh gelombangnya. Kemudia dibuat suatu initial model kecepatan yang bernilai homogen sebagai input awal dalam melakukan inversi. Dengan data waktu tempuh hasil picking first break sebagai waktu tempuh observasi dan initial model kecepatan, dilakukan proses inversi waktu tempuh sehingga menghasilkan tomogram yang berisi citra nilai kecepatan.
IV. HASIL DAN PEMBAHASAN
Pada penelitian ini, dilakukan lima percobaan untuk melihat pengaruh parameter dan geometri akuisisi terhadap tomogram hasil inversi.
Percobaan 1
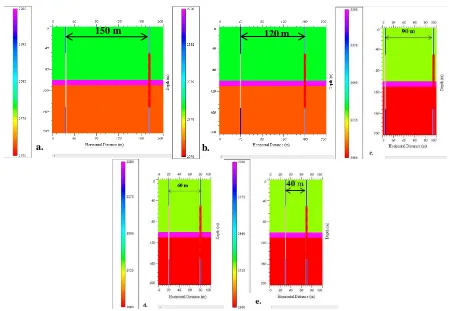
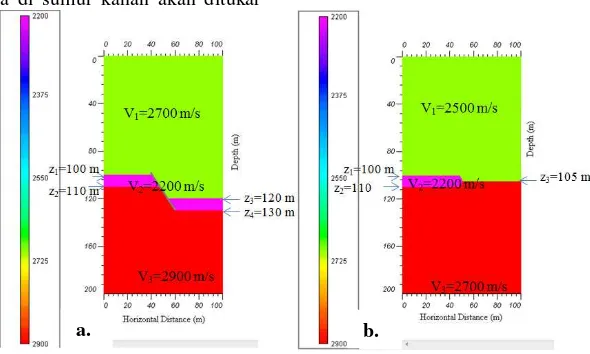
Pada percobaan 1, dilakukan pengubahan parameter jarak antar sumur untuk melihat efek perubahan jarak antar sumur terhadap tomogram hasil inversinya. Pada percobaan 1, digunakan model dengan sisipan low velocity layer (LVL) yang memiliki kecepatan sebesar 2200 m/s, sedangkan lapisan lainnya memiliki kecepatan sebesar 2700 m/s dan 2900 m/s.
Gambar 2. Model kecepatan dengan LVL 10 m
Gambar 3. Konfigurasi akuisisi pada model dengan tebal LVL 10 m. (a) memiliki jarak antar sumur sebesar 150 m, (b) 120 m, (c) 90 m, (d) 60 m, dan (e) 40 m
Gambar 4. Tomogram hasil inversi pada model dengan tebal LVL 10 m. (a) memiliki jarak antar sumur sebesar 150 m, (b) 120 m, (c) 90 m, (d) 60 m, dan (e) 40 m
a.
150 m 120 m
b.
a.
b.
Gambar 5. Tomogram hasil inversi pada model dengan tebal LVL 8 m
Gambar 6. Tomogram hasil inversi pada model dengan tebal LVL 4 m
a. b.
a.
b.
Dari percobaan 1, dapat dilihat bahwa parameter jarak antar sumur sangat mempengaruhi hasil inversi yang diperoleh. Hal ini disebabkan karena jarak antar sumur mempengaruhi raypath yang dilalui. Namun secara keseluruhan, pada percobaan ini anomali kecepatan rendah sudah terlihat jelas, bahkan pada percobaan dengan ketebalan LVL 4 m dan jarak antar sumur 150 m, walaupun estimasi kecepatannya masih belum akurat. Percobaan tersebut juga membuktikan bahwa semakin tipis lapisan target, semakin sulit pula lapisan tersebut dicitrakan dengan baik.
Percobaan 2
Pada percobaan 2, parameter yang diubah adalah jarak antar sumur dan interval source dan receiver. Terdapat 3 jenis akuisisi. Akuisisi 1 menggunakan jarak antar sumur sebesar 60 m dan interval source
dan receiver 2 m dan jumlah source dan receiver
masing-masing 50 buah. Akuisisi 2 menggunakan jarak antar sumur sebesar 60 m dan interval source
dan receiver 1 m serta jumlah source dan receiver
100 buah, akuisisi 3 menggunakan jarak antar sumur sebesar 40 m dan interval source dan
receiver 2 m serta jumlah source dan receiver 50 buah. Pada percobaan 2 ini, digunakan model dengan dua sisipan lapisan batubara.
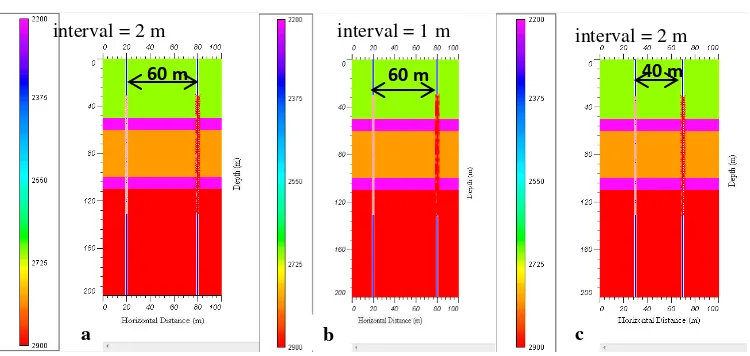
Gambar 7. Model kecepatan percobaan 2 dengan sisipan 2 LVL
Gambar 8. Geometri akuisisi 1 (a) dengan jarak antar sumur 60 m dan interval source dan receiver 2 m, akuisisi 2 (b) dengan jarak antar sumur 60 m dan interval source dan receiver 1 m, dan akuisisi 3 (c) dengan
jarak antar sumur 40 m dan interval source dan receiver 2 m 60 m
a
.
interval = 2 m
60 m
b
interval = 1 m
40 m interval = 2 m
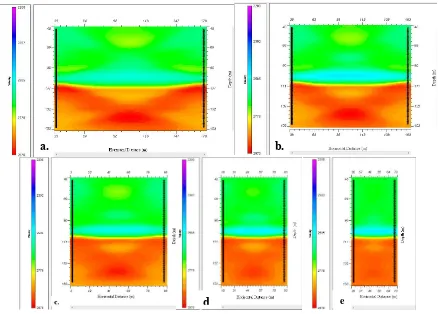
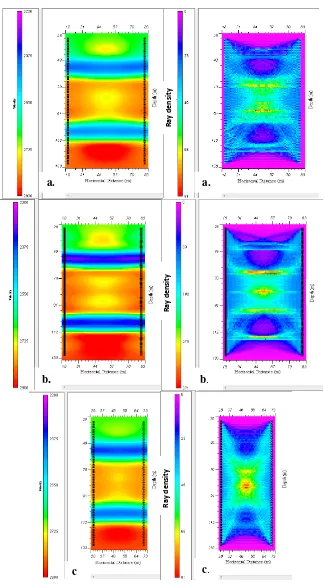
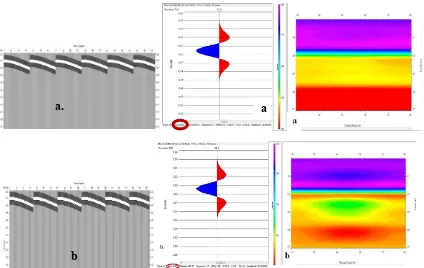
Gambar 9. Tomogram hasil inversi (kiri) dan plot kepadatan sinar (kanan) pada percobaan 2 dari (a) akuisisi 1, (b) akuisisi 2, dan (c) akuisisi 3
Percobaan 2 ini menunjukkan bahwa interval
source dan receiver akan mempengaruhi kepadatan sinar di tiap blok. Semakin rapat interval yang digunakan, semakin banyak pula sinar yang melalui suatu blok sehingga estimasi kecepatan pada suatu blok bisa lebih akurat. Namun perubahan interval
source dan receiver tidak mempengaruhi raypath
gelombang, sehingga tidak memberikan perubahan hasil inversi yang sesignifikan dengan pengubahan jarak antar sumur. Untuk mencitrakan anomali kecepatan dengan lebih baik, apabila jarak antar sumur yang digunakan cukup jauh, maka diperlukan interval source dan receiver yang lebih rapat.
a.
R
ay d
e
ns
it
y
a.
R
ay d
e
ns
it
y
b
.
b
.
c
R
ay d
e
ns
it
y
Percobaan 3
Pada percobaan ini, parameter yang diubah adalah letak sumur source dan receiver yang ditukar, yaitu
source yang berada di sumur kanan akan ditukar
dengan receiver sumur kiri. Percobaan kali ini menggunakan model dengan sisipan LVL yang mengalami diskontinuitas, yaitu patahan berupa sesar dan pinch-out.
Gambar 10. Model kecepatan dengan (a) patahan , dan (b) pinch-out untuk percobaan 3
Gambar 11. Akuisisi 1 pada model patahan dengan (a) source di sumur kanan dan receiver di sumur kiri, dan akuisisi 2 dengan (b) source di sumur kiri dan receiver di sumur kanan
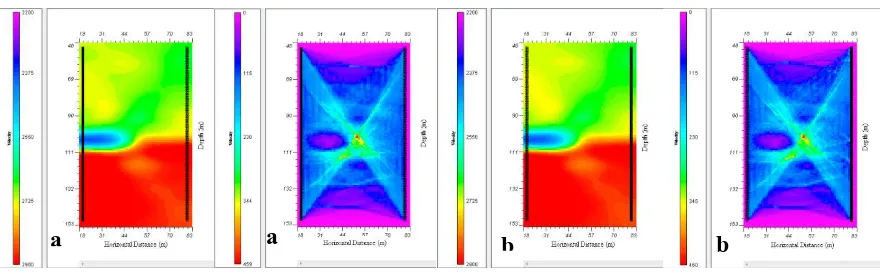
Gambar 12. Tomogram hasil inversi dan kepadatan sinar pada model patahan untuk (a) akuisisi 1, dan (b) akuisisi 2
60 m
a
60 m
b
a.
a
b
b
.
Gambar 13. Tomogram hasil inversi dan kepadatan sinar pada model pinch-out untuk (a) akuisisi 1, dan (b) akuisisi 2
Percobaan 3 ini menunjukkan bahwa kedua hasil inversinya tidak jauh berbeda. Dari plot kepadatan sinar juga dapat dilihat bahwa tidak ada perbedaan yang signifikan. Hal ini menunjukkan bahwa penukaran sumur tidak terlalu berpengaruh banyak pada raypath, sehingga hasil inversinya tidak jauh berbeda.
Percobaan 4
Pada percobaan 4 , parameter yang diubah adalah ukuran blok pada model yang digunakan. Ukuran blok yang semula 1x1 m diubah menjadi 3x3 m. Model yang digunakan pada percobaan ini adalah model kecepatan dengan LVL setebal 10 m pada percobaan 1.
Gambar 14. Tomogram hasil inversi (kiri), plot kepadatan sinar (tengah) dan selisih error nilai kecepatan antara model awal dengan model hasil inversi (kanan) untuk ukuran blok (a) 1x1 m, dan (b) 3x3 m
Dari tomogram hasil inversinya, dapat dilihat bahwa ukuran blok yang besar akan membuat tomogram terlihat lebih blocky dan tidak smooth. Dari persebaran error nilai kecepatan, dapat dilihat pula bahwa nilai error tiap blok dengan ukuran 3 m
x 3 m lebih kecil dibandingkan nilai error tiap blok dengan ukuran 1 m x 1 m. Hal ini disebabkan karena sinar gelombang yang melalui suatu blok akan lebih banyak apabila ukuran bloknya lebih besar, sehingga parameter yang diketahui dalam
a
a
b
.
b
a a
.
a.
b b
persamaan tomografi akan lebih banyak dan akan menghasilkan hasil inversi yang lebih akurat. Oleh karena itu, perlu dicari nilai ukuran blok yang optimal yang dapat menghasilkan tomogram dengan nilai error yang kecil namun dapat memperlihatkan perlapisan bawah permukaan yang cukup smooth untuk memudahkan proses interpretasi.
Percobaan 5
Percobaan ini dapat dibagi menjadi dua percobaan, yaitu percobaan dengan mengubah frekuensi sumber dan percobaan dengan mengubah sampling rate. Percobaan pertama membandingkan hasil dari akuisisi dengan sampling rate 1 ms dan frekuensi 50 Hz dengan 25 Hz. Percobaan kedua membandingkan hasil dari akuisisi dengan frekuensi 50 Hz dan sampling rate 1 ms dengan 2 ms.
Gambar 15. Model kecepatan dan geometri akuisisi pada percobaan 5
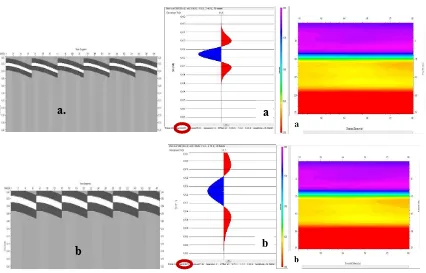
Gambar 16. Data sintetik (kiri), contoh satu tras sintetik (tengah), dan tomogram hasil inversi dari percobaan 5 dengan sampling rate 1 ms dan frekuensi (a) 50 Hz dan (b) 25 Hz
Dari percobaan pertama dengan pengubahan nilai frekuensi, dapat dilihat bahwa ternyata hasil inversinya tidak menunjukkan perbedaan. Hal ini disebabkan karena perubahan frekuensi tidak mempengaruhi waktu first arrival yang menjadi
input dalam inversi waktu tempuh. Pada gambar tengah, dapat dilihat bahwa first arrival untuk masing-masing frekuensi terjadi pada waktu yang sama, yaitu 0,023 s.
a.
a
b
.
Gambar 17. Data sintetik (kiri), contoh satu tras sintetik (tengah), dan tomogram hasil inversi dari percobaan 5 dengan frekuensi 50 Hz dan sampling rate (a) 1 ms dan (b) 2 ms
Pada percobaan ini yang melakukan pengubahan nilai sampling rate, dapat dilihat bahwa terjadi pergeseran waktu first arrival, dimana pada
sampling rate 2 ms, first arrival terjadi pada 0,022 s. Hal ini secara keseluruhan akan mempengaruhi
picking first break, sehingga menghasilkan model kecepatan yang berbeda pula.
V. KESIMPULAN DAN SARAN
Beberapa parameter akuisisi sangat mempengaruhi hasil inversi waktu tempuh. Jarak antar sumur yang dekat akan semakin mempengaruhi raypath yang dilalui sehingga citra tomografinya dapat lebih baik. Interval source dan receiver mempengaruhi kepadatan sinar tiap blok. Namun penukaran letak sumur untuk source dan receiver tidak begitu mempengaruhi tomogram hasil inversi. Pembesaran ukuran blok pada model menyebabkan model terlihat lebih blocky dan tidak smooth. Tomogram hasil inversi dengan ukuran blok yang lebih besar menghasilkan nilai error yang lebih kecil dibandingkan tomogram dengan ukuran blok yang lebih kecil. Perlu dicari nilai ukuran blok yang optimal yang dapat menghasilkan tomogram dengan error yang kecil namun dapat memperlihatkan perlapisan bawah permukaan yang cukup smooth sehingga memudahkan dalam interpretasi. Pengubahan sampling rate
mempengaruhi waktu first arrival sehingga berpengaruh pada hasil inversi, sedangkan pengubahan frekuensi tidak mempengaruhi waktu
first arrival maupun hasil inversinya.
Saran untuk penelitian selanjutnya di bidang ini adalah perlunya perbandingan hasil data seismik asli dengan parameter akuisisi yang sama dengan parameter akuisisi pada percobaan ini untuk memvalidasi kesimpulan-kesimpulan pada penelitian ini.
DAFTAR PUSTAKA
Bregman, N. D., R. C. Bailey dan C. H. Chapman, 1989, Crosshole Seismic Tomography, Geophysics, (54), p1082-1090.
Butler, D. K. dan J. R. Curro Jr., 1981, Crosshole Seismic Testing – Procedures and Pitfalls, Geophysics, (46), p23-29.
Cheng, A. C. H. dan J. Zhang, 2001, Imaging Complex Structures with Crosswell Seismology, SEG International Exposition and Annual Meeting, San Antonio, Texas.
Harris, J. M. dan R. T. Langan, 1991, Crosswell Seismic Fills The Gap, Geophysical Corner.
McMechan, G. A., 19983, Seismic Tomography in Boreholes, Geophys. J. R. astr. Soc., (74), p601-612.
Litosphere, Advances in Geophysics, (46), 81-197.
Stewart, R. R., 1991, Exploration Seismic Tomography: Fundamentals, Society of Exploration Geophysicists.