Sejarah Robot Dunia
Awal perkembangan tentang robot dunia di mulai dari China pada tahun 1023–957 SM ditemukan pada catatan Lie Ze. Seorang tukang yang bernama Yan Shi mempersembahkan sebuah automata atau mekanika berupa boneka tiruan manusia yang bisa bergerak kepada King Mu of Zhou. (Wikipedia)
Baru sekitar abad XIX robot mulai dikembangkan oleh insinyur teknik, pada saat itu berbekal keahlian mekanika untuk membuat jam mekanik mereka membuat boneka tiruan manusia yang bisa bergerak pada bagian tubuhnya.
Pada tahun 1920 robot mulai berkembang dari disilin ilmu elektronika, lebih spesifiknya pada cabang kajian disiplin ilmu elektronika yaitu teknik kontrol otomatis, tetapi pada masa-masa itu komputer yang merupakan komponen utama pada sebuah robot yang digunakan untuk pengolaan dat masukan dari sensor dan kendali aktuator belum memiliki kemmpuan komutasi yang cepat selain ukuran fisik komputer pada masa itru masih cukup besar.
Robot-robot cerdas mulai berkembang pesat seiring berkembagnya komputer pada sekitar tahun1950-an. Dengan semakin cepatya kemampuan komputasi komputer dan semakin kecilnya ukuran fisiknya,maka robot-robot yang dbuat semakin memiliki kecerdasan yang cukup baik untuk melakukan pekerjan-pekerjan yang biasa dilakukan olaeh manusia. Pada awal diciptakaanya, komputer sebagai alat hitung saja, perkembangan algoritma pemrograman menjadikan komputer sebagai instrumentasi yang memiliki
kemammpauankemampuan seperti otak manusia. Artificial intelegent atau kecerdasan buatan adalah algoritma pemrograman yang
membuat komputer memiliki kecerdasan seperti manusia yang mampu menalar, mengambil kesimpulan dan keputusan berdasarkan
pengalaman yang dimiliki.
Perkembangan Robot di Indonesia
masyarakatnya. Bagaimanakah asal mula nama robot ? Dan bagaimanakah Perkembangan robot di Indonesia ? Penasaran
Robot adalah sebuah alat mekanik yang dapat melakukan tugas fisik, baik menggunakan pengawasan dan kontrol manusia, ataupun
menggunakan program yang telah didefinisikan terlebih dulu (kecerdasan buatan). Robot biasanya digunakan untuk tugas yang berat, berbahaya, pekerjaan yang berulang dan kotor. Biasanya kebanyakan robot industri digunakan dalam bidang produksi. Penggunaan robot lainnya termasuk untuk pembersihan limbah beracun, penjelajahan bawah air dan luar angkasa, pertambangan, pekerjaan "cari dan tolong" (search and rescue), dan untuk pencarian tambang. Belakangan ini robot mulai memasuki pasaran konsumen di bidang hiburan, dan alat pembantu rumah tangga, seperti penyedot debu, dan pemotong rumput.
Sadar tak sadar robot telah masuk kepada kehidupan sehari-hari kita dalam berbagai bidang. Seiring dengan berkembangnya teknologi, khususnya teknologi elektronik, peran robot menjadi semakin penting tidak saja dibidang sains, tapi juga di berbagai bidang lainnya, seperti di bidang kedokteran, pertanian, bahkan militer. Kata 'robot' diambil dari bahasa Ceko (Chech) yang artinya 'pekerja' (worker).
Sampai saat ini perkembangan robot di Indonesia tidak ada data yang dapat memberikan kesimpulan kapan, serta bagaimana asalmuasal robot masuk ke Indonesia. Tetapi, ini terbukti dari kemauan SDM (Sumber Daya Manusia) bangsa Indonesia dalam minatnya pada teknologi robot seperti
dikembangkannya sejumlah laboratorium, seperti MEPPO (Mesin Perkakas Teknik Produksi dan Otomatis) yang diprakarsai oleh BPPT bekerjasama dengan ITB, Industri strategis, serta LET (Laboratorium Elektronika Terapan) di LIPI. Awal tahun 80-an kebijakan nasional memberikan kesempatan kepada para peminat robot-robot di Indonesia ini.
Saat ini banyak robot security yang dipakai untuk menjinakan bom-bom yang saat ini sedang marak terjadi dimana-mana. Cara kerja robot penjinak bom tersebut berjalan perlahan melintasi halaman dan
menyelinap ke dalam rumah target Robot ini mampu mengambil gambar, video bahkan memindahkan benda. Dengan pergerakannya membopong kamera, robot ini memuluskan langkah polisi dalam membekuk orang yang bersembunyi dalam rumah di tengah ladang jagung yang berhawa dingin tersebut, yang diduga sebagai
selama satu dekade terakhir (termasuk terror bom yang terjadi di Hotel The Ritz-Carlton dan JW Marriott, kawasan Mega kuningan, Jakarta 17 Juli lalu)
Sumber referensi :
Prestasi UKM ROBOTIC PNP
Juara 1 KRCI Kategori Robot Scoker Tingkat Regional I di Batam. Peringkat 10 besar Kontes Robot Indonesia di UI.
Robot Line Tracer Analog
Pengertian Line Follower Robot (LFR)
Line Follower Robot (Robot Pengikut Garis) merupakan robot yang dapat berjalan mengikuti sebuah lintasan, ada yang menyebutnya dengan Line Tracker, Line Tracer Robot dan
sebagainya. Garis yang dimaksud adalah garis berwarna hitam diatas permukaan berwarna putih atau sebaliknya, ada juga lintasan dengan warna lain dengan permukaan yang kontras (gelap-terang) dengan warna garisnya.
Bagaimana cara robot mengikuti garis?
Seperti layaknya manusia, bagaimana manusia dapat berjalan pada mengikuti jalan yang ada tanpa menabrak dan sebagainya, tentunya karena manusia memiliki “mata” sebagai penginderanya. Begitu juga robot line follower ini, dia memiliki sensor garis yang berfungsi seperti “mata” pada manusia.
Gambar 2. Sensor garis
Sensor garis ini mendeteksi adanya garis pada permukaan lintasan dengan membandingkan kondisi saat terkena permukaan gelap dan permukaan terang. Informasi yang diterima sensor garis kemudian diteruskan ke prosesor untuk diolah sedemikian rupa dan akhirnya hasil informasi hasil olahannya akan diteruskan ke penggerak atau motor agar motor dapat menyesuaikan gerak tubuh robot sesuai garis yang dideteksinya.
Misalkan dalam Gambar 1 (sensor kiri pada permukaan gelap dan sensor kanan pada permukaan terang) robot dikondisikan berjalan maju (lurus), maka robot akan berbelok apabila sensor menemui kondisi yang berbeda:
Gambar 3. Kondisi sensor saat berbelok ke kanan
Ketika sensor kanan bertemu dengan permukaan gelap, roda kanan akan berutar ke belakang (mundur) sehingga robot berbelok kekanan.
Gambar 4. Kondisi sensor saat berbelok ke kiri a) Tikungan ke kiri
Ketika sensor kiri bertemu dengan permukaan terang, roda kiri akan berutar ke belakang (mundur) sehingga robot berbelok ke kiri.
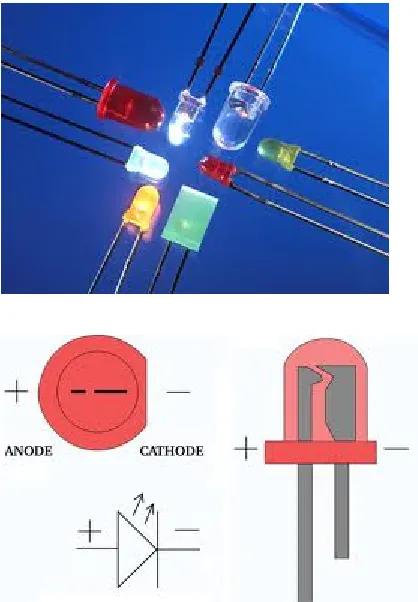
Komponen Utama Line Follower Robot Analog 1. Led
Gambar 5. Bentuk led dan skematik led
1. Photodioda
Gambar 6. Bentuk dan symbol photo dioda 1. IC Komparator
Komparator sesuai namanya berfungsi untuk membandingkan tegangan input dengan tegangan referensi. Apabila tegangan input lebih besar dari tegangan referensi maka tegangan outputnya akan sama dengan tegangan maks power supply (high/1), apabila tegangan input lebih kecil dari tegangan referensi maka tegangan outputnya akan sama dengan tegangan min power supply (low/0).
Gambar 7. Skematik dan bentuk IC komparator
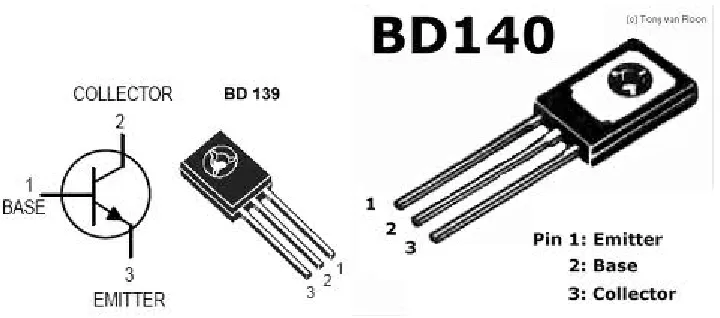
1. Transistor
Transistor adalah alatyang dipakai sebagai penguat, sebagai sirkuit pemutus dan penyambung (saklar), modulasi sinyal atau sebagai fungsi lainnya. Pada line follower fungsinya lebih diutamakan sebagai saklar (switch) pada rangkaian motor penggerak.
Resistor adalah komponen elektronika yang berfungsi untuk memberikan hambatan terhadap aliran arus listrik. Dalam rangkaian listrik dibutuhkan resistor dengan spesifikasi tertentu, seperti besar hambatan, arus maksimum yang boleh dilewatkan dan karakteristik hambatan terhadap suhu dan panas. Resistor memberikan hambatan agar komponen yang diberi tegangan tidak dialiri dengan arus yang besar, serta dapat digunakan sebagai pembagi tegangan.
Gambar 9. Resistor
1. Opto coupler
Optocoupler merupakan salah satu jenis komponen yang terdiri dari pasangan LED dan Photo transistor, dimana transistor akanaktif ketika LED menyala (dialiri arus). Hal ini dapat dimanfaatkan untuk
memisahkan rangkaian komparator dengan rangkaian driver pada line follower analog.
Gambar 10. Skematik dan bentuk Optocoupler
1. Motor DC
Motor DC merupakan motor yang membutuhkan arus searah (DC) dalam penggunaannya. Umumnya berkecepatan rendah sampai sedang,
Gambar 11. motor DC
1. Trimpot
Trimpot (Trimmer Potentiometer) adalah jenis resistor
variable berupa potensiometer yang cara mengubah nilai tahanannya dengan cara mentrim dengan menggunakan obeng. Fungsi lainnya yakni digunakan untuk memperoleh tegangan yang bervariasi dengan memanfaatkan rumus pembagi tegangan dari dua resistor, jadi dibaratkan dalam trimpot terdapat dua resistor yang dihubungkan seri dimana nilai hambatannnya dapat diubah-ubah.
Gambar 12. Trimpot
Skema Rangkaian Robot
Sensor Garis
Gambar 13. Skema rangkaian sensor 1. Komparator
Sebuah komparator dalam robot line tracer untuk menghasilkan tegangan output dengan logika high atau low (1 atau 0) yang digunakan untuk mengaktifkan driver motor (Pada penjelasan berikutnya). IC komparator yang digunakan adalah LM339 yang terdiri dari empat buah komparator yang masing-masing membandingkan dua tegangan. Bila tegangan pada channel (A) “lebih besar” dari tegangan channel (B) maka output komparator akan berlogika HIGH atau 1. Sedangkan bila tegangan input pada channel (A) “lebih kecil” dari
teganganpada channel(B) maka output komparator akan berlogika LOW atau 0
Gambar 14. Komparator
1. Driver Motor
Gambar 15. Rangkaian driver H untuk motor DC
Skema Keseluruhan
Line Tracer Digital
Pada Line Tracer analog, pembuatan robot tidak menggunakan software. Pada line tracer digital
1. software pemrograman bahasa, ex: C, pascal, dll.
2. software downloader mikro, maksudnya ialah suatu perangkat lunak yang berfungsi memasukkan program ke dalam mikrokontroler tersebut…. perhatikan blok sistem dari robot line follower mikrokontroler dibawah ini: