Bifurkasi
Cusp
pada Sistem
Predator-Prey
dengan Faktor Pertahanan Grup dan
Gangguan Berkala
Harjanto, E.1 dan Tuwankotta, J. M.2
1
Ganesha 10, Bandung 40132,[email protected]
2
Ganesha 10, Bandung 40132,[email protected]
Abstrak. SistemPredator-Prey merupakan sistem yang menarik untuk dipelajari.
SistemPredator-Preyyang akan dibahas dalam paper ini adalah sistem dengan
mema-sukkan faktor pertahanan grup dan gangguan berkala. Sistem ini memperlihatkan dinamik yang tidak biasa, yang salah satunya adalah bagaimana dua buah bifurkasi
foldyang hilang tidak dengan melalui bifurkasicusp.
Kata Kunci:Sistem Predator-Prey, Faktor Pertahanan Grup, Gangguan Berkala, Bifurkasi Fold, Bifurkasi Cusp
1
Pendahuluan
Berbagai model di alam dituliskan dalam bentuk sistem persamaan diferensial. Model-model tersebut biasanya bergantung dari parameter yang tidak dike-tahui secara eksak nilainya, namun besarnya tidak berubah terhadap waktu. Analisis dari model-model tersebut hanyalah bermanfaat jika itu berlaku untuk nilai-nilai parameter yang cukup generik. Dalam hal tersebut, analisis bifurkasi memainkan peranan penting karena, bukan hanya dapat mendeskripsikan di-namik suatu sistem yang secara struktural stabil, tetapi juga menjelaskan tran-sisi antar kondisi yang stabil secara struktural.
Paper ini membahas masalah bifurkasi pada sebuah keluarga sistem di-namik dalam kelas sistem Predator-Prey. Khususnya, konsentrasi pada paper ini adalah mendeskripsikan sebuah bifurkasi dengan kodimensi dua dimana dua buah bifurkasi dengan kodimensi satu, yaitu Fold bifurkasi, bertemu ke-mudian hilang. Mekanisme yang biasanya terjadi ketika dua buah Fold bi-furkasi hilang, yang telah dikenal di literatur, adalah melalui bibi-furkasi Cusp. Meskipun bifurkasi Cusp juga terjadi pada model yang dipelajari, paper ini mengajukan sebuah contoh dimana hilangnya dua buah bifurkasi Fold terjadi melalui mekanisme yang berbeda.
Pada bagian selanjutnya, kami akan memperkenalkan sistem Predator-Prey
dengan fungsi respon predator yang tak monoton (fungsi Holling tipe IV [6]) dan gagguan berkala (time periodic perturbation). Bagian selanjutnya menje-laskan kontinuasi numerik yang kami lakukan pada sistem tersebut menggu-nakan AUTO [7]. Paper ini ditutup dengan beberapa catatan untuk penelitian selanjutnya.
2
Model
Predator-Prey
dengan Faktor Pertahanan
Grup dan Gangguan Berkala
Misalkan x menyatakan kepadatan dari prey (mangsa), dan y kepadatan dari
predator (pemangsa). Model Predator-Prey dengan faktor pertahanan grup dan gangguan berkala adalah sebagai berikut:
˙ x=x ( 1−λ0(1 +εsinωt)x− αx2+yβx+1) ) , ˙ y=y ( −δ−µy+αx2+xβx+1 ) (1) dengan P(x) = x αx2+βx+ 1.
Pada model ini telah dilakukan penskalaan (disebut juga normalisasi) se-hingga tingkat pertumbuhan prey adalah satu. Parameter δ dan µ berturut-turut menyatakan tingkat mortalitas daripredator dan tingkat kompetisi antar
predator. Daya dukung lingkungan (carrying capacity) diasumsikan bervariasi terhadap waktu disekitar nilai rata-rata λ0; sebagai contoh pandang model
predator-prey di sebuah danau yang volume airnya bervariasi musiman. Model ini juga memuat fungsi responP(x) yang bergantung pula terhadap dua parameterα danβ. Fungsi ini menggambarkan tingkat predasi prey seba-gai fungsi dari kepadatan prey. Parameter α dan β berfungsi untuk menyedi-akan kebebasan untuk memodelkan misalkan keefektifan pemangsaan terhadap kepadatanprey. Untuk suatu nilaiα danβ, kita dapat memasukan efek perta-hanan dariprey saat kepadatanprey meningkat. Inilah alasan mengapa model (1) ini disebut sebagai model Predator-Prey dengan faktor pertahanan grup. Salah satu interaksi di alam yang menggambarkan hal tersebut adalah inter-aksi antara kuda zebra dan singa. Fungsi respon predator yang lainnya dan pembahasan dalam modelPredator-Prey dapat dilihat di [6], [4], dan [5]. Untuk mengubah sistem menjadi autonomous, maka sistem (1) dipasangkan dengan sistem dinamik yang memiliki solusiu= sinωt,v = cosωtyang stabil asimtotik. Maka sistem menjadi:
˙ x=x ( 1−λ0(1 +εu)x− αx2+yβx+1) ) , ˙ y =y ( −δ−µy+ x αx2+βx+1 ) , ˙ u=u+ωv−u(u2+v2), ˙ v =−ωu+v−v(u2+v2). (2)
Khususnya, kita membatasi dengan syarat awal (x(0), y(0), u(0), v(0) = (x◦, y◦,1,0) denganx◦, y◦ ∈R.
3
Bifurkasi dari Sistem
(2)
Pada paper ini, kita memilih nilai parameter δ = 1.1, λ0 = 0.01, µ = 0.1,
pada permukaanS1 pada [1]) untuk Sistem (1) tetapi tanpa adanya gangguan
berkala padacarrying capacity. Diagram bifurkasi untuk Sistem (2) untukε = 0 bersesuaian dengan hasil yang diperoleh pada paper [1].
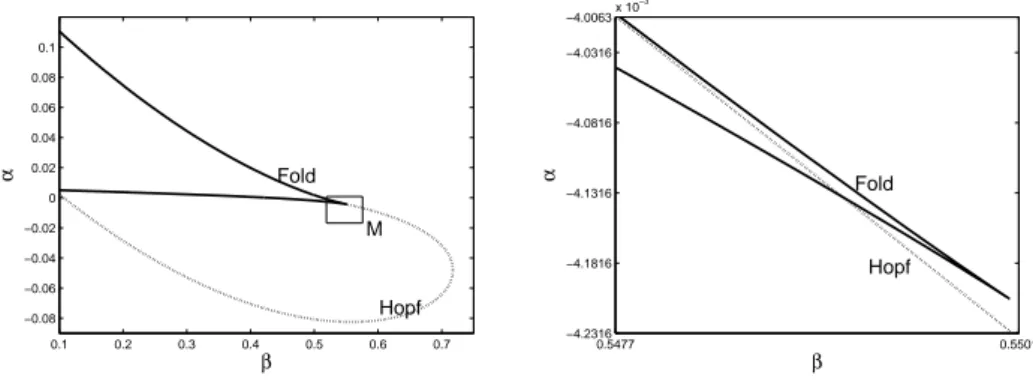
Diagram bifurkasi dua parameter terhadapαdanβdiperoleh dengan melakukan kontinuasi ekuilibrium (x◦, y◦) = (1.816. . . ,1.434. . .). Hal ini dapat dilakukan pada Sistem (2) karena ketika ε= 0, persamaan untuk ˙u dan ˙v tidak lagi ter-pasangkan dengan persamaan untuk ˙xdan ˙y. Titik awal untukαdanβ adalah berturut-turut 0.002 dan 0.25. Diagram bifurkasi yang diperoleh adalah seperti pada Gambar 1.
Ketika ε̸= 0, diagram bifurkasi yang didapat berbeda dengan kasus ε= 0: munculnya dua buah bifurkasi Cusp yang baru (lihat Gambar 2). Untuk
0.1 0.2 0.3 0.4 0.5 0.6 0.7 −0.08 −0.06 −0.04 −0.02 0 0.02 0.04 0.06 0.08 0.1 β α Fold Hopf M 0.5477 0.5501 −4.2316 −4.1816 −4.1316 −4.0816 −4.0316 −4.0063x 10 −3 β α Fold Hopf
Gambar 1.Diagram bifurkasi tanpa gangguan berkala (ε= 0) terhadapαdanβdengan nilai awal
δ = 1.1,λ0 = 0.01,µ = 0.1, α = 0.002, β = 0.25, ω = 1, x = 1.816, dan y = 1.434, kanan : perbesarannya 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 −0.08 −0.06 −0.04 −0.02 0 0.02 0.04 0.06 0.08 β α Cusp 1 Cusp 2 Torus 1 N
Gambar 2.Diagram bifurkasi dengan gangguan berkala (ε= 0.07) terhadapαdanβdengan nilai
awalδ= 1.1,λ0= 0.01,µ= 0.1,α= 0.002,β= 0.25,ω= 1,x= 1.816, dany= 1.434
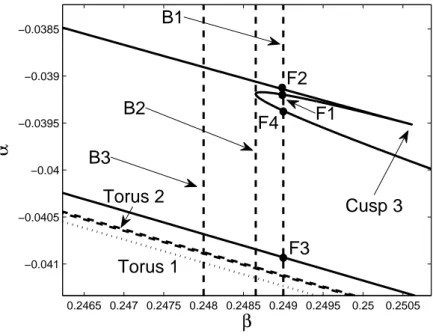
mengerti mekanisme apa yang menyebabkan kemunculan dua buah bifurkasi ini, dilakukan kontinuasi solusi periodik dari sistem (2) terhadap α dengan β tetap (fixed) seperti pada Gambar 3 (slicing terhadap β). Ada tiga buah garis di bidang α dan β, yaitu: B1 = {(α,0.249)}, B2 = {(α,0.24863. . .)}, dan B3 ={(α,0.248)}. Untuk nilai-nilai parameterαdan β, pada ketiga garis
tersebut, kita mengikuti solusi periodik dari sistem (2), dan hasilnya dipresen-tasikan pada Gambar 4. Solusi periodik yang dikontinuasi terhadap α pada Gambar 4 direpresentasikan oleh maxx. Mengikuti garisB1, kita menemukan empat buah bifurkasi Fold yang diberi label F1, F2, F3, dan F4. Dengan memperbesar nilaiβ mengikuti titik terjadinya (locus) bifurkasi Fold, titikF1 dan F2, bersatu pada bifurkasi Cusp, yaitu Cusp 3, sedangkan F3 dan F4 bersatu pada bifurkasi Cusp 2 (lihat Gambar 2).
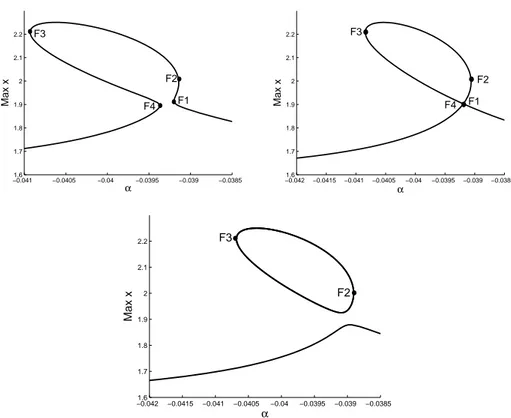
Ketika kita mengikuti solusi periodik dari sistem (2) sepanjang garis B2, kita menemukan bahwa bifurkasifoldF1 danF4 bertemu, namun tidak melalui bifurkasi Cusp (seperti pertemuan antaraF1 danF2, sertaF3 danF4). Ketika nilai β semakin kecil, yaitu pada garis B3, titik F1 dan F4 hilang, dan ter-bentuklah sebuah kurva tertutup di bidang: α−maxx seperti pada Gambar 4 kanan.
Jika kita memperhatikan Gambar 4 kanan, dan mengikuti solusi periodik dari sistem (2) terhadapα, dengan mulai dariα =−0.042 danβ = 0.248, maka kita akan memiliki sebuah solusi periodik yang memenuhi: 1.6<maxx <1.7. Solusi periodik ini dapat dikontinuasi dengan memperbesarα hingga−0.0385 tanpa mengalami bifurkasi apapun. Untuk −0.041 < α < −0.0405 terjadi bifurkasi non lokal (yaitu tidak terkait dengan solusi periodik yang telah kita peroleh sebelumnya) yaitu bifurkasi FoldF3. Setelah melalui bifurkasi ini, den-gan memperbesarα, dua buah solusi periodik tercipta dan kemudian bertemu kembali melalui bifurkasi FoldF4 di sekitar: α =−0.039.
0.2465 0.247 0.2475 0.248 0.2485 0.249 0.2495 0.25 0.2505 −0.041 −0.0405 −0.04 −0.0395 −0.039 −0.0385 β α Torus 1 B1 B3 B2 Cusp 3 F4 F3 F2 F1 Torus 2
Gambar 3. Kotak N pada Gambar 2 dengan proses slicing terhadap β pada diagram bifurkasi tersebut
Kurva tertutup yang menghubungkan titik F3 dan F4 tidak dapat diperoleh dengan mengkontinuasi solusi periodik sepanjang garisB3. Untuk memperoleh kurva ini kita perlu melakukan kontinuasi solusi periodik pada garis B1 yang
−0.0411.6 −0.0405 −0.04 −0.0395 −0.039 −0.0385 1.7 1.8 1.9 2 2.1 2.2 α Max x F3 F2 F1 F4 −0.0421.6 −0.0415 −0.041 −0.0405 −0.04 −0.0395 −0.039 −0.0385 1.7 1.8 1.9 2 2.1 2.2 α Max x F3 F2 F1 F4 −0.0421.6 −0.0415 −0.041 −0.0405 −0.04 −0.0395 −0.039 −0.0385 1.7 1.8 1.9 2 2.1 2.2 α Max x F3 F2
Gambar 4.Diagram bifurkasiαterhadap maxxdariB1,B2, danB3 pada Gambar 3. Atas:B1
danB2 berturut-turut, bawah:B3
dekat dengan titikF3 (atauF2), dan mengkontinuasinya dengan memperkecil β (dan mempertahankanα konstan).
4
Kesimpulan
Model Predator-Prey dengan faktor pertahanan grup dan gangguan musiman memiliki dinamik yang berbeda dengan model yang tanpa gangguan musiman. Pada model dengan gangguan musiman muncul dua bifurkasiCusp yang baru. Pada kemunculan dua bifurkasiCusp yang baru ini dua buahFold bersatu dan menghilang tanpa melalui bifurkasi Cusp seperti yang biasanya terjadi. Kami menduga kemunculan kedua bifurkasi Cusp melalui bifurkasi berkodimensi tinggi yaitu Swallowtail. Ini akan menjadi topik selanjutnya dalam penelitian kami.
Daftar Pustaka
1. H. W. Broer et al., 2005, Bifurcations of a predator-prey model with nonmonotonic response
function, C. R. Acad. Sci. Paris Ser. I 341 (2005),pp. 601-604.
2. H. W. Broer et al., 2006,A predator-prey model with non-monotonic response function, Regular
and Chaotic Dynamics 11 (2) (2006), pp. 155-165.
3. H. W. Broer et al., 2007, Dynamics of a predator-prey model with non-monotonic response
function, DCDS-A 18 (2&3) (2007) ,pp. 221-251.
4. S. Rinaldi et al., 1993, Multiple Attractors, Catastrophes and Chaos in Seasonally Perturbed
5. Huaiping Zhu et al., 2002,Bifurcation Analysis of a Predator-Prey System with Nonmonotonic
Functional Response, SIAM J. Appl. Math. 63 (2002),pp. 636-682.
6. C. S. Holling , 1965, The Functional Response of Predators to Prey Density and Its Role in
Mimicry and Population Regulation, Mem. ent. Soc. Can. 45, pp. 3-60.
7. E. J. Doedel et al., 2008, AUTO 2000: Continuation and Bifurcation Software for