ii Sari
Sampai saat ini kegiatan pumping test (uji pemompaan) untuk mengetahui karakteristik serta besaran debit aquifer terhadap fungsi waktu khususnya dalam kegiatan eksplorasi masih banyak dilakukan dengan cara dan peralatan yang konvensional sehingga, tingkat keakurasian serta kecepatan pengambilan data tidak terekam dengan baik dan tepat. Adapun penelitian yang telah dilaksanakan oleh Tim Rekayasa dan Rancang Bangun Alat Uji Pemompaan (pumping test) Dengan Metode Pengukuran Secara Otomatis Puslitbang tekMIRA Tahun 2005 serta peralatan yang sudah beredar dipasaran memiliki keterbatasan atau kelemahan selain harga jual yang mahal.
Perbedaan mendasar dari peralatan yang sudah ada dengan hasil rancang bangun yang dilaksanakan oleh Tim Rancang Bangun Monitoring Sistem Pengambilan Data Pumping Test tahun 2010 ini adalah, penggunaan mekanik otomatis level air dengan sensor non kontak yang dapat membaca fluktuasi muka air dengan tidak dipengaruhi oleh density, suhu, kelembaban serta memiliki jangkauan (range) pengukuran yang lebih dalam. Disamping itu peralatan Automatic Water Level Monitoring System (AWLMS) dilengkapi dengan water flow meter yang dapat diakses melalui software sebagai pengganti penggunaan metoda ‘V’ note yang selama ini biasa digunakan untuk mengukur volume serta debit pemompaan.
Pemantauan dan perekaman data dirancang dengan menggunakan software dan hardware (Micro Controller dan Remote Terminal Unit) untuk merespon (memantau dan merekam) setiap pergerakan mekanik otomatis level air dan waterflow meter secara real time atau periodik .
Dari pengamatan unjuk kereja peralatan pada saat uji coba simulasi di laboratorium dan pelaksanaan uji coba di lapangan menunjukan hasil yang sesuai dengan yang diharapkan dimana kinerja mekanik pelampung, waterflow meter serta software dapat merespon setiap perubahan/fluktuasi muka air tanah melalui perangkat komputer PC atau Laptop.
iii
DAFTAR ISIHalaman
KATA PENGANTAR i
SARI ii
DAFTAR ISI iii
DAFTAR GAMBAR v
DAFTAR TABEL vi
DAFTAR LAMPIRAN vi
I. PENDAHULUAN
1.1. Latar belakang 1
1.2. Ruang lingkup penelitian 2
1.3. Maksud dan tujuan 3
1.4. Sasaran 3
1.5. Lokasi kegiatan 3
II. TINJAUAN PUSTAKA
2.1. Teori Dasar 4
2.2. Pemanfaatan teknologi mekatronika untuk peralatan 5 uji pemompaan (pumping test)
2.3. Perkembangan teknologi water level monitoring 6
2.3.1. Sensor elektroda 7
2.3.2. Sensor tekanan (Pressure Transducer) 7 2.3.3. Sensor gelombang Frekwensi (Ultrasonic) 8
2.3.4. Sensor infra merah (Infra Red) 9
2.3.5. Sensor magnetik sircle (Rotary Encoder) 10
III. PROGRAM KEGIATAN 11
3.1. Rancangan mekanik otomatis level air 11
3.1.1. Pelampung (Float) 12
3.1.2. Handle 12
3.1.3. Pengatur otomatis kecepatan dan arah putaran motor 13 (automatic speed motor controller)
3.1.4. Modifikasi roda gigi (gear) motor penggerak 14 3.1.5. Penggulung kawat sling (Roler sling) 14
3.2. Rancangan Perangkat Elektronika 15
iv
3.2.2. Regulator power supply 15
3.2.3. Speed motor controller 16
3.2.4. Micro controller 16
3.2.5. Remote terminal unite 17
3.3. Rancangan aplikasi software 17
3.4. Kalibrasi peralatan 19
3.5. Uji coba skala lab 22
3.6. Uji coba lapangan 23
IV. METODOLOGI 30
V. HASIL DAN PEMBAHASAN 32
5.1. Sinkronisasi sistem 32
5.2. Pengukuran debit aliran (water flow discharge) 32 Dan water level
VI. KESIMPULAN DAN SARAN 36
6.1. Kesimpulan 36
6.2. Saran 36
DAFTAR PUSTAKA 37
v
DAFTAR GAMBARNo. Gambar
Keterangan Halaman
1.1.
Peta Lokasi Kegiatan Penelitian
32.3
Diagram mekatronika
62.4
Sensor Elektroda Sounding
72.5
Sensor Pressure Transducer
82.6
Sensor Gelombang Frekwensi (Ultrasonic)
92.7
Rotary Encoder Encremental
103.1
Rancangan Mekanik Otomatis Level Air
113.2
Float (Pelampung)
123.3
Penampang Handle
133.4 Rancangan Automatic Speed Motor Controller 13
3.5
Modifikasi Roda Gigi (gear)
143.6 Roller 14
3.7
Skema Elektronika dan Fisik Battery Charger
153.8
Skema Elektronika Regulator
153.9
Skema Elektronika Speed Motor Controller
163.10
Skema Elektronika Micro Controller
163.11
Remote Terminal Unit (RTU)
173.12
Gambar Tampilan Software Monitor
173.13
Gambar Tampilan Software Grafik
183.14
Gambar Tampilan Software Tabulasi
183.15
Kalibrasi Peralatan
193.16
Mekanik Otomatis Water Level
193.17
Grafik Kalibrasi Mekanik Otomatis Level Air A (Enc-A)
20 3.18Grafik Kalibrasi Mekanik Otomatis Level Air B (Enc-B)
20 3.19Grafik Kalibrasi Mekanik Otomatis Level Air C (Enc-C)
213.20
Grafik Hasil Kalibrasi Waterflow Meter
213.21
Waterflow Meter
213.22
Uji Coba Simulasi AWLMS
223.23 Peta Potensi Air Tanah Lampung Tengah 24
3.24
Mekanisme Uji Coba AWLMS di Lapangan
243.25
Uji Coba Lapangan Automatic Water Level Monitoring System
(AWLMS)
253.26
Hasil Perekaman Data Awal dan Akhir Sumur Pantau 1
26 3.27Hasil Perekaman Data Awal Dan Akhir Sumur Pantau 2
27vi
3.28Hasil Perekaman Data Awal dan Akhir Sumur Produksi
283.29
Hasil Perekaman Data Debit, Encoder 1, 2 Dan 3
294.1
Diagram Alir Metodologi Kegiatan
304.2
Metodologi Perancangan Software
315.1 Pengukuran Debit Aliran Air Tanah Dan Fluktuasi Level Muka Air Pada Sumur Pantau 01
33 5.2 Pengukuran Debit Aliran Air Tanah Dan Fluktuasi Level Muka Air
Pada Sumur Pantau 02
34 5.3 Pengukuran Debit Aliran Air Tanah Dan Fluktuasi Level Muka Air
Pada Sumur Produk
si
35
DAFTAR TABEL
Tabel Keterangan Halaman
2.1. Jenis Metode Pumping Test 4
3.1. Kegiatan Persiapan Pumping Test 23
DAFTAR LAMPIRAN
1
BAB I
PENDAHULUAN 1.1 Latar Belakang
Sebelum tahapan kegiatan eksploitasi air tanah dilakukan, perlu dilakukan tahapan pekerjaan uji pemompaan (pumping test) pada sumur bor yang dikenal sebagai sumur uji. Uji pemompaan ini dilakukan untuk mengetahui karakteristik sumur bor dan karakteristik lapisan akuifer pada satu atau beberapa lubang sumur uji dengan pengamatan muka air tanah pada sumur pantau (observation well) atau piezometer disekitar sumur uji. Prinsip kerjanya adalah melakukan pengukuran/ pengamatan besarnya debit dan parameter fisik akuifer terhadap fungsi penurunan muka air tanah (step draw-down test), kambuh (recovery test) terhadap fungsi waktu.
Selama ini pengukuran pada uji pemompaan (pumping test) tersebut dilakukan dengan metode pengukuran secara manual, sehingga tingkat akurasi dalam pengukuran, pengambilan data dan proses analisisnya masih kurang sempurna. Untuk meningkatkan keakurasian pengambilan data dan mempercepat proses analisis uji pemompaan, maka perlu adanya suatu alat uji pemompaan dengan metode pengukuran secara otomatis, yaitu dengan memasang alat sensor debit dan sensor penurunan muka air tanah (water level) pada sumur uji dan sensor muka air tanah (water level) pada sumur pantau yang dihubungkan dengan personal komputer dengan menerapkan teknologi mekatronika.
Aplikasi rancang bangun alat uji pemompaan secara otomatis ini sangat membantu dalam mempercepat proses pengolahan data dan analisis terhadap karakteristik sumur bor dan akuifer. Dari tahapan ini akan dicari besaran dari parameter hidrolika akuifer dan sumur bor, antara lain nilai; debit air (Q), koefisien transmisivitas (T), konduktivitas hidrolik (K) dan koefisien isian (S) pada sumur uji. Kegiatan ini merupakan kegiatan tahap pertama dari tiga tahapan/tahun kegiatan yang direncanakan.
Pasal 626 ayat (e) Peraturan Menteri Energi dan Sumber Daya Mineral Nomor 0030 Tahun 2005 tentang Organisasi dan Tata Kerja Departemen Energi dan Sumber Daya Mineral,
Bab III Pasal 4 dari Peraturan Pemerintah Nomor 35 Tahun 2007 tentang Pelaksanaan Kegiatan Peningkatan Kemampuan Perekayasaan, Inovasi dan Difusi Teknologi.
Pasal 37 dan 38 Keputusan Kepala Pusat Penelitian dan Pengembangan Teknologi Mineral dan Batubara Nomor 23.K/70/BLP/2006 tanggal 12 April 2006 tentang Penjabaran Tugas, Fungsi, Susunan Organisasi dan Tata Kerja Pusat Penelitian dan Pengembangan Teknologi Mineral dan Batubara.
2 Sejalan dengan visi untuk menjadi puslitbang yang mandiri, profesional, dan unggul dalam pengembangan dan pemanfaatan mineral dan batubara dan misinya untuk melaksanakan litbang mineral dan batubara, dimana perlu penerapan teknologi untuk memecahkan permasalahan-permasalahan yang berkaitan dengan pencapaian misi tersebut, maka cukup penting untuk dilakukan pembuatan peralatan yang sederhana namun dapat mengatasi persoalan berkaitan dalam menghadapi tantangan pertambangan masa depan melalui upaya mencari solusi yang inovative.
Oleh karena itu Puslitbang Teknologi Mineral dan Batubara melalui program penerapan teknologi penambangan mineral dan batubara merencanakan satu lagi kegiatan yang aplikatif dan inovatif dengan membuat alat monitoring sederhana untuk kegiatan pumping tes secara otomatis. Kegiatan otomatisasi sistim pengambilan data pada pelaksanaan pumping tes ini mendukung visi dan misi dari kelompok program IPTEK penambangan untuk menjadi lembaga terdepan dalam mendorong penerapan teknologi penambangan berwawasan konservasi dan lingkungan serta lembaga sertifikasi sistem manajemen lingkungan pertambangan, dan misi untuk menghasilkan model-model, metode, prasarana baru dalam teknologi penambangan, geoteknologi penambangan dan lingkungan pertambangan.
1.2 Ruang Lingkup Kegiatan
Lingkup pekerjaan yang akan dilakukan meliputi : Studi literatur;
Pembuatan Kerangka Acuan Kerja
Pembuatan Rancangan model alat uji pemompaan (pumping test); Persiapan peralatan dan bahan
Pembuatan dan perakitan alat;
Uji coba alat dan system di laboratorium meliputi aspek otomatisasi alat dan software;
Evaluasi hasil ujicoba laboratorium dan penyempurnaan peralatan Ujicoba di lapangan
Evaluasi hasil ujicoba lapangan
3 1.3 Maksud dan Tujuan
Maksud adalah membuat rancang bangun otomatisasi alat uji pemompaan (pumping test) dengan sistem uji pemompaan bertahap (step draw-down test) dan uji kambuh (recovery test) dengan melakukan otomatisasi terhadap pengukuran debit (Q, m3/detik), penurunan muka air
tanah (m) terhadap fungsi waktu.
Sedangkan tujuannya adalah agar system dan peralatan yang dirancang dapat dimanfaatkan dalam salah satu kegiatan eksplorasi yaitu pumping test secara terintegrasi pada satu sumur produksi dan dua atau lebih sumur pantau untuk mendapatkan data pengukuran hasil uji pemompaan (pumping test) mengenai karakteristik sumur bor (konstanta B & C, well loss, debit Q dan koefisien isian S optimal) dan karakteristik akuifer (koefisien transmisivitas T, konduktivitas hidrolik K).
1.4 Sasaran
Sasaran adalah terciptanya satu unit alat uji pemompaan (pumping test) secara otomatis terdiri dari, 3 unit mekanik otomatis level muka air, 1 buah Remote Terminal Unit (RTU), 1 perangkat software pemantau dan perekam data.
1.5 Lokasi Kegiatan
Lokasi kegiatan untuk pembuatan alat akan dilakukan di Bandung, sedangkan ujicoba langsung alat akan dilakukan di PTBA Tarahan Lampung,. (Lihat Gambar 1).
Gambar 1.1
Peta Lokasi Kegiatan Penelitian
Tarahan
PROPINSI LAMPUNG
Lokasi
Kegiatan
4 BAB II
TINJAUAN PUSTAKA
2.1. Teori Dasar
Pengideraan/pemantauan perubahan/fluktuasi muka air tanah melalui uji pemompaan (pumping test) adalah untuk mengetahui besaran dari parameter hidrolika akuifer dan sumur bor : debit air (Q), koefisien transmisivitas (T), konduktivitas hidrolik (K) dan koefisien isian (S) terhadap fungsi waktu.
Fluktuasi dan kecepatan perubahan muka air tanah saat pemompaan pada sumur produksi dan pengaruhnya terhadap sumur pantau memiliki ragam perbedaan di setiap daerah pengukuran, sesuai dengan bentuk elevasi batuan, karakteristik aquifer serta kapasitas pompa yang digunakan. Untuk mengetahui besaran perubahaan tersebut dapat diukur dengan menggunakan peralatan pendeteksi level muka air dari atas permukaan sumur serta pengukuran debit dalam durasi tertentu hingga mencapai titik jenuh (water balance).
Dalam tahapan uji pemompaan (pumping test) pertama-tama yang harus dipahami adalah jenis akuifer yang akan diuji. Dengan memahami jenis akuifer tersebut, maka dapat digunakan metode yang akurat dalam tahapan pumping test. Adapun jenis metode yang digunakan dapat dilihat pada tabel 1, (G.P. Krusemen dan N.A de Ridder and J.M. Verweij, 1991).
Tabel 2.1 Jenis Metode Pumping Test
Jenis Aliran Steady Tipe Akuifer Unconfined Aquifer Confined Aquifer Leaky Aquifer Unsteady Metode Yang Digunakan Thiems-Dupuit Neuman’s Wive Fitling Thiems 1. Theis 2. Jacob 1. De-Cillee 2. Hantus- Jacob 1. Walton 2. Hantus Wive Fitling
Uji pemompaan dilakukan dengan menerapkan (step draw-down test) dan uji kambuh (recovery test) pada sumur produksi dan sumur pantau.
Pada Otomatisasi Sistim Monitoring Pumping Tes digunakan Digital Water Level AWLMS (Automatic Water Level Monitoring System) merupakan suatu alat yang dirancang untuk mengukur dan merekam kedalaman muka air pada saat kegiatan pumping test secara otomatis.
5 Data hasil pengukuran kemudian dapat ditampilkan pada layar monitor komputer baik berupa grafik maupun tabulasi.
Untuk komunikasi data sistem telemetri melalui kabel data, yaitu suatu sistem yang memungkinkan penggunanya untuk mendapatkan data tanpa harus mendatangi lokasi instalasi. Pengambilan data secara langsung menggunakan komputer (laptop) yang dihubungkan dari microcontroller mekanik otomatis level air melalui instalasi Remote Terminal Unit dimana pengiriman data dilakukan secara kontinyu setiap perubahan yang direspon oleh rotary encoder dan flow meter dalam satu waktu. AWLMS Software merupakan perangkat lunak untuk mempermudah dalam pengambilan dan pengolahan data, sehingga data yang diperoleh dapat ditampilkan dalam bentuk grafik maupun table, dan dapat dicetak.
2.2. Pemanfaatan Teknologi Mekatronika Untuk Peralatan Uji Pemompaan (pumping test) Prinsip dasar pengembangan otomasi peralatan pumping test adalah rekayasa mekanik, elektronika dan komputer menjadi sebuah perangkat yang dapat melakukan pengukuran/ pengamatan data pumping test untuk selanjutnya mengetahui karakteristik sumur bor (konstanta B & C, well loss, debit Q dan koefisien isian S optimal) dan karakteristik akuifer (koefisien transmisivitas T, konduktivitas hidrolik K) pada sumur uji secara otomatis akurat dan efisien.
Istilah Mekatronika merupakan terjemahan dari mechatronics, gabungan dari kata mechanic dan electronics. Mekatronika adalah suatu ilmu yang mengkombinasikan secara sinergis rekayasa mekanika, elektronika dan informatika. Istilah ini dicetuskan pertama kali oleh Tetsuro Mori dari Yasakawa Electric Company pada tahun 1969. Tetapi sejak tahun 1982 perusahaan tersebut memutuskan untuk melepaskan haknya atas kata mechatronics sehingga sejak saat itu pula kata tersebut dipakai secara luas.
Komunitas Mekatronika Indonesia merekomendasikan definisi mekatronika adalah sinergis IPTEK teknik mesin, teknik elektronika, teknik informatika dan teknik pengaturan (atau teknik kendali) untuk merancang, membuat atau memproduksi, mengoperasikan dan memelihara sebuah sistem untuk mencapai tujuan yang diinginkan.
Secara sedehana pembentukan ilmu mekatronika terdiri atas dua lapisan fisika dan logika. dan tiga dasar ilmu utama elektronika, informatika dan mekanika. Dengan melihat asal katanya dapat dengan mudah dipahami, bahwa ilmu ini menggabungkan atau mensinergikan disiplin ilmu Mekanika, ilmu Elektronika dan Informatika.
6 Pada awal perkembangannya mekatronika hanya mencakup unsur mekanika dan elektronika saja. Dengan ditemukannya mikroprosesor pada tahun 1980an, keilmuan mekatronika menjadi lebih maju dan berkembang. Mekatronika menjadi suatu ilmu yang tidak hanya mengintegrasikan teknik mesin dan elektronika, tetapi juga komputer dan kontrol. Mekatronika juga didukung oleh ilmu-ilmu lain misalnya, ilmu bahan, mikroelektronika, juga kecerdasan buatan.
Sebagian besar teknologi mekatronika digunakan untuk teknik presisi sinergis, teori kontrol, ilmu komputer, dan teknologi sensor dan aktuator untuk merancang produk dan proses perbaikan, seperti :
sistem pertahanan sistem industri modern
pemeliharaan diagnosis dan pemecahan masalah sistem ruang
robotika
pengembangan perangkat lunak barang konsumsi listrik
2.3. Perkembangan Teknologi Water Level Monitoring
Pengembangan peralatan monitoring level muka air tanah atau air permukaan telah banyak diupayakan oleh instansi kelitbangan, praktisi, akademisi, perusahaan bahkan oleh perorangan.
Gambar 2.3 Diagram mekatronika
7 Namun demikian dalam salah satu kegiatan eksplorasi untuk uji pemompaannya masih menggunakan perangkat sederhana ‘Sounding’ yaitu untuk mendeteksi fluktuasi muka air tanah (DWL) pada sumur bor serta penggunaan bak penampungan dengan metoda V notch untuk mengetahui debit pemompaan.
Pemanfaatan teknologi sensor yang dapat mendeteksi perubahan jarak/ panjang suatu media telah banyak diaplikasi menjadi salah satu instrumen perancangan alat monitoring, diantaranya :
Dengan kontak : Sensor Elektroda, Pressure transducer Tanpa kontak : Sensor Infra red, Ultrasonic, Rotary Encoder.
Sedangkan untuk menghitung volume serta debit pemompaan menggunakan sensor Ultrasonic, Infra red serta Waterflow propeller sensor.
2.3.1. Sensor Elektroda
Sensor sounding/lampu led merupakan alat pemantau muka air tanah terbilang sederhana dengan hanya menggunakan elektroda sebagai probe (kontaktor) yang dihubungkan oleh kabel konduktor dengan baterai melalui pengeras suara atau lampu led sebagai indikator..
Dalam pelaksanaan uji pemompaan (pumping test) probe elektroda dimasukan kedalam sumur produksi atau sumur uji hingga menyentuh muka air. Pada saat bersamaan terjadi kontak pada kedua kutub elektroda yang telah dialiri arus listrik DC melalui kabel konduktor yang diberi label ukuran. Terjadinya hubungan pendek antara kedua kutub elektroda tersebut menyebabkan bunyi pada pengeras suara atau nyala pada lampu led indikator maka ukuran kedalaman muka air dapat dilihat pada label yang tertera pada kabel tersebut.
2.3.2. Sensor Tekanan (Pressure Transducer)
Hydro pressure transducer adalah sensor dengan konsep tekanan hidrostatik setara dengan air di atas diafragma sensor. Pada saat pengukuran sensor berada pada posisi terendam di dasar
Kelemahan sensor elektroda :
Pengukuran setiap perubahan/fluktuasi muka air dilakukan dengan cara manual sehingga perekaman data dan waktu (real time) kurang akurat.
8 air dan diafrahma sensor akan mendeteksi setiap perubahan tekanan dari permukaan air (waterlevel).
Gambar 2.5
Sensor Pressure Transducer Kelemahan sensor :
Tidak tahan terhadap suhu tinggi dan benturan benda keras seta harus dikalibrasi setiap 6 bulan.
Dapat ditumbuhi lumut atau korosi yang dapat mempengaruhi sensitifitas sensor. Keterbatasan jangkauan (range) pengukuran.
Density air dapat mempengaruhi format penghitungan sensor (perlu kalibrasi)
2.3.3. Sensor Gelombang Frekwensi (Ultrasonic)
Sinyal ultrasonik seperti gelombang suara yang dapat didengar, kecuali frekuensi tinggi. Ultrasonik transduser merupakan kristal piezoelektrik yang beresonansi ke frekuensi yang dikehendaki dan mengubah energi listrik menjadi energi akustik atau sebaliknya. Pada gambar menunjukkan bagaimana gelombang suara, ditransmisikan dalam bentuk sebuah kerucut, yang tercermin dari target kembali ke transduser. Sensor ultrasonic memiliki 2 membran (speaker dan microphone) yang berfungsi mengirim gelombang suara (chirp) ditransmisikan dalam bentuk pulsa berfrekwensi tinggi ( biasanya 20 s.d 42 kHz) pada objek yang diukur kemudian dipantulkan kembali (echo) pada microphone sebagai elemen penerima gelombang.
Perangkat elektronik digunakan sebagai alat bantu sensor untuk mengukur waktu yang dibutuhkan selama proses pengiriman dan pemantulan gelombang suara (Couch II, Leon W., 1993). Dengan mengacu pada kecepatan suara di udara, pada jarak yang ditentukan dari permukaan air dari sensor dapat dihitung dan dikonversikan menjadi satuan jarak.
Remote control
9 Dalam pelaksanaan pumping test pengukuran muka air pada sumur uji, posisi sensor ultrasonic diletakan dan diarahkan ke atas permukaan air tanpa ada penghalang.
Sensor ultrasonic juga digunakan untuk pengukuran : Permukaan air, kontrol gerak, kontrol kecepatan, keamanan, jarak atau putaran, ruang (dimensi).
Kelemahan sensor :
Kecepatan suara dipengaruhi oleh suhu udara sehingga dapat mempengaruhi bacaan sensor
Sensor tidak dapat ditempatkan pada lubang sumur yang miring (deviate) karena dinding sumur akan menghalangi muka air
2.3.4. Sensor Infra Merah (Infra Red)
Sensor infra merah bekerja menggunakan sinar infra merah sebagai media untuk komunikasi data antara receiver dan transmitter. Sistem akan bekerja jika sinar infra merah yang dipancarkan terhalang oleh suatu benda yang mengakibatkan sinar infra merah tersebut tidak dapat terdeteksi oleh penerima. Sensor infra red digunakan antara lain sebagai pengendali jarak jauh, alarm keamanan, otomatisasi. Pemancar pada sistem ini tediri atas sebuah LED infra merah yang dilengkapi dengan rangkaian yang mampu membangkitkan data untuk dikirimkan melalui sinar infra merah, sedangkan pada bagian penerima biasanya terdapat foto transistor, fotodioda, atau inframerah module yang dihubungkan secara optik berfungsi untuk menerima sinar inframerah yang dikirimkan oleh pemancar.
Modul modul yang digunakan sensor infra red untuk mengukur jarak diantaranya : InfraRed Object Detector, modul OP-01, modul ADC0809, modul DST-52 dan modul LCD. Peubahan jarak dapat dihitung dengan mengukur besarnya tegangan output (DC) pada sensor InfraRed Object
Gambar 2.6
10 Detector. Semakin dekat jarak obyek dengan sensor maka semakin tinggi pula tegangan yang dikeluarkan oleh output sensor.
Sama halnya dengan sensor ultrasonic, sensor infra red tidak dapat digunakan untuk mengukur muka air dalam sumur bor karena infrared yang ditempatkan pada mulut lubang dimungkinkan akan menyentuh dinding sumur terlebih jika posisi sumur tidak vertikal/deviasi.
2.3.5. Sensor Magnetik Sircle (Rotary Encoder/Potensio meter)
Rotary encoder adalah divais elektromekanik yang dapat memonitor gerakan dan posisi. Umumnya menggunakan sensor optik untuk menghasilkan serial pulsa yang dapat diartikan menjadi gerakan, posisi, dan arah. Sehingga posisi sudut suatu poros benda berputar dapat diolah menjadi informasi berupa kode digital oleh rotary encoder untuk diteruskan oleh rangkaian kendali. Rotary encoder termasuk sensor non kontak umumnya digunakan pada pengendalian robot, motor drive, dan lain sebagainya.
Sensor magnetic sircle tersusun dari suatu piringan tipis yang memiliki lubang-lubang pada bagian lingkaran piringan. LED ditempatkan pada salah satu sisi piringan sehingga cahaya akan menuju ke piringan. Di sisi yang lain suatu photo-transistor diletakkan sehingga photo-transistor ini dapat mendeteksi cahaya dari LED yang berseberangan. Piringan tipis tadi dikopel dengan poros motor, atau divais berputar lainnya yang ingin kita ketahui posisinya, sehingga ketika motor berputar piringan juga akan ikut berputar. Apabila posisi piringan terbuka mengakibatkan cahaya dari LED dapat mencapai transistor melalui lubang-lubang yang ada, maka photo-transistor akan mengalami saturasi dan akan menghasilkan suatu pulsa gelombang persegi. Sensor rotary encoder memiliki kelemahan yang relatif lebih kecil dan memiliki ketahanan yang lebih unggul dibanding sensor lainnya.
Gambar 2.7
12 BAB III
PROGRAM KEGIATAN
3.1. Rancangan Mekanik Otomatis Level Air (Hardware).
Rancang bangun peralatan otomatisasi sistem pengambilan data pumping test melibuti 3 blok pekerjaan diantaranya :
- Pembuatan mekanik otomatis level air - Pembuatan perangkat elektronika - Pembuatan software
Pembuatan mekanik otomati level air dimulai dari perancangan/disain badan alat, pelampung, speed motor controller, gear, pulley, roller dan lay out (tata letak peralatan).
Tampak atas Tampak samping 52 cm 15 cm 8 7 11 12 1 7 c m 10 6 13 3 2 9 5 4 1 1. Pelampung 2. Kawat sling 0.3mm 3. Pulley 4. Handle 5. Pulley 10. Power suply 11. Belt 12. Gulungan kawat sling 13. Microcontroller 6. Pengatur otomatis kecepatan motor 7. Encoder 8. Pulley 9. Motor Gambar 3.1.
13 Bahan dan alat yang digunakan :
Pelampung : Pvc, nylon, besi pemberat
Handle : Plat stainless 1 mm
Kawat sling : Baja elastis 0.3 mm
Pulley : Nylon
Pengatur otomatis : Potensio geser 10k, switcing, as stainles Kecepatan motor 4 mm, pulley, nylon, acrylic, pegas
Sensor : Rotary Encoder Incramental Motor : Motor power window mobil 12 volt Power suply dan charger : Trafo 5A, regulator, acrylic, kipas.
Belt : Karet timing belt
Gulungan kawat sling : Nylon, bearing. As stainless
3.1.1. Pelampung (Float)
Pembuatan pelampung harus memperhitungkan berat pelampung yang disesuaikan dengan berat minimal/maksimal daya tekan pegas yang terdapat pada alat pengatur arah serta kecepatan motor (Automatic speed motor controller).
3.1.2. Handle
Handle adalah bagian dari mekanik untuk mengarahkan posisi pelampung pada lubang sumur uji yang dilengkapi dengan bearing pulley agar dapat memperkecil hambatan akibat gesekan kawat.
Bahan bahan yang digunakan : plat stainless 1mm, nylon, bearing dan as stainless 4mm Gambar 3.2 Float (Pelampung) 50 cm 1 inch Pipa PVC Besi pemberat Dop bawah Dop atas
14 3.1.3. Pengatur Otomatis Kecepatan Dan Arah Putaran Motor (Automatic Speed Motor
Controller)
Instrumen ini merupakan komponen utama dalam perancangan alat yang berfungsi untuk mengatur arah putaran serta kecepatan motor secara otomatis sehingga dapat menarik (menggulung) atau mengulur kawat seling sesuai dengan kecepatan perubahan pelampung pada level muka air. Penggunaan pegas berdasarkan hukum Hooke “pegas akan melakukan gaya terhadap gaya yang menariknya dan arahnya selalu berlawanan dengan arah pergeserannya”. Besarnya gaya berbanding terbalik :
F : Gaya
F = -Kx
- : Berbanding terbalik K : Konstanta pegas x : Jarak pergeseran W : DayaW = ½Fx
F : Gaya x : Jarak pergeseran Gambar 3.3 Penampang Handle Tampak atas Tampak samping 15 cm Tampak depan Gambar 3.4Rancangan Automatic Speed Motor Controller
Pulley Stang potensio Switch Potensio geser Pegas Ceesing
15 3.1.4. Modifikasi Roda Gigi (Gear) Motor Penggerak
Motor penggerak yang dipergunakan untuk memutar roll sling adalah motor 12 volt power window kendaraan roda empat. Agar dapat dipasang rantai karet maka perlu dilakukan modifikasi pada roda gigi (gear) motor sesuai dengan ukuran/interval gigi pada gear roler . Tujuannya agar tidak terdapat speeling atau jeda pada saat motor mulai bergerak.
Bahan yang digunakan adalah aluminium silinder solid kemudian dibentuk (dibubut) sehingga membentuk seperti gambar di bawah :
Gambar 3.5
Modifikasi Roda Gigi (gear)
3.2.1
Penggulung Kawat (Roller)Pembuatan roller dengan roda gigi (gear) dimaksudkan untuk menggulung atau mengulur kawat sling pada saat pelampung dalam posisi turun atau sebaliknya. Kedalaman sumur baik butom maupun level air diambil rata-rata mencapai 200 meter. Oleh karena itu ukuran gulungan kawat sling harus disesuaikan dengan volume/panjang kawat yang akan digulung sepanjang 200 meter berdiameter 0.3 mm.
25 mm 7 mm 11 mm
Tampak depan Tampak belakang
4 mm Tampak samping 5,4 mm 20,7 mm 20 mm Gambar 3.6. Penggulung Kawat (Roller)
4 0 m m Bearing (20 mm) 10 0 mm 90 mm 15 mm R in g (9 0 mm ) Gear (7 8 mm ) 65 mm
16 3.2 Rancangan Perangkat Elektronika
3.2.1. Battery Charger
Pelaksanaan uji pemompaan step draw-down test dan long term test berdurasi 72 jam secara terus menerus. Untuk menjamin kontinuitas power supply battery DC 12 Volt yang dibutuhkan oleh rotary encoder dan micro controller maka, perlu dibuat battery charger yang dapat menjaga kesetabilan tegangan pada battery.
Gambar 3.7
Skema Elektronika dan Fisik Battery Charger
3.2.2. Regulator Power Suply
Regulator power supply adalah perangkat elektronik yang dirancang untuk merubah tegangan 220 V menjadi DC 12 V sehingga dapat mengatur kecepatan maksimal/minimal motor.
Gambar 3.8
17 3.2.3. Speed Motor Controller
Pada saat terjadinya penurunan muka air tanah akibat dari pemompaan ataupun sebaliknya pada saat kambuh (recovery) maka, pelampung harus dapat mengikuti laju perubahan muka air tersebut. Oleh karena itu harus dirancang perangkat elektronik yang dapat mengatur perubahan arah maupun kecepatan putaran motor secara otomatis.
Gambar 3.9
Skema Elektronika Speed Motor Controller
3.2.4. Micro Controller
Mikrokontroler adalah Central Processing Unit (CPU) yang disertai dengan processor, memori serta sarana input atau output dan dibuat dalam bentuk chip. Alat ini ditempatkan pada mekanik automatic water level untuk membaca setiap putaran pada rotary encoder kemudian mengirimkannya melalui kabel data ke Remote Terminal Unite (RTU).
Gambar 3.10
18 3.2.5. Remote Terminal Unite
Remote Terminal Unite (RTU) adalah perangkat elektronik yang terdiri dari 4 buah micro controller ( 3 unit micro controller automatic water level, 1 unit micro controller flow meter) dilengkapi dengan conector DB 9 dan USB Serial cable input.
Gambar 3.11 Remote Terminal Unit (RTU)
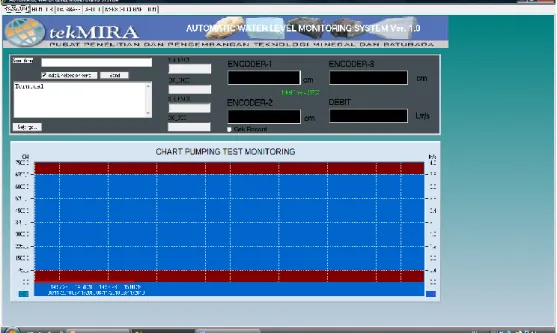
3.3. Rancangan Aplikasi Software AWLMS (Automatic Water Level Monitoring Sistem)
Gambar 3.12
19 Gambar 3.13
Gambar tampilan software grafik
Gambar 3.13
Gambar tampilan software tabulasi
3.4 Kalibrasi Mekanik Omatis Level Air
Sebelum melakukan uji coba peralatan di lapangan perlu dilakukan tahap kalibrasi peralatan mekanik otomatis level air. Hal ini untuk mengetahui seberapa jauh tingkat sensitivitas, akurasi
20 dan unjuk kerja peralatan tersebut terhadap kondisi aktual dilapangan. Untuk memudahkan kalibrasi serta menghasilkan tingkat keakurasiaan yang baik maka perlu dirancang alat bantu kalibrasi seperti terlihat pada (Gambar 3.15 ).
Peralatan yang akan dikalibrasi berjumlah 3 unit Mekanik otomatis level air ( A, B dan C) dengan cara melakukan pengukuran setiap perubahan jarak yang dioperasikan menggunakan alat bantu kalibrasi sebanyak 30 kali dengan pendekatan fungsi linear dari suatu nilai sumbu x terhadap nilai sumbu y.
Berdasarkan hasil kalibrasi diperoleh persamaan serta grafik seperti terlihat pada (Gambar 3.18, 3.19, 3.20).
Gambar 3.14 Kalibrasi Peralatan
Gambar 3.15
21
Gambar 3.16
Grafik Mekanik Otomatis Level Air A (Enc-A)
Gambar 3.17
22 3.5. Kalibrasi Water Flow Meter
Untuk mengkalibrasi water flow meter diperlukan beberapa peralatan pendukung seperti tangki air volume 250 s.d 500 liter, water pump, takaran air 5 liter, stop kran, water pas serta pipa PVC.
Kalibrasi dengan cara dilakukan pemompaan dari tangki air kemudian diukur setiap perubahan level air (volume) terhadap fungsi waktu sebanyak 30 kali. (Gambar 3.21)
Gambar 3.18
Grafik Mekanik Otomatis Level Air C (Enc-C)
Gambar 3.20
Eaterflow Meter
Gambar 3.19
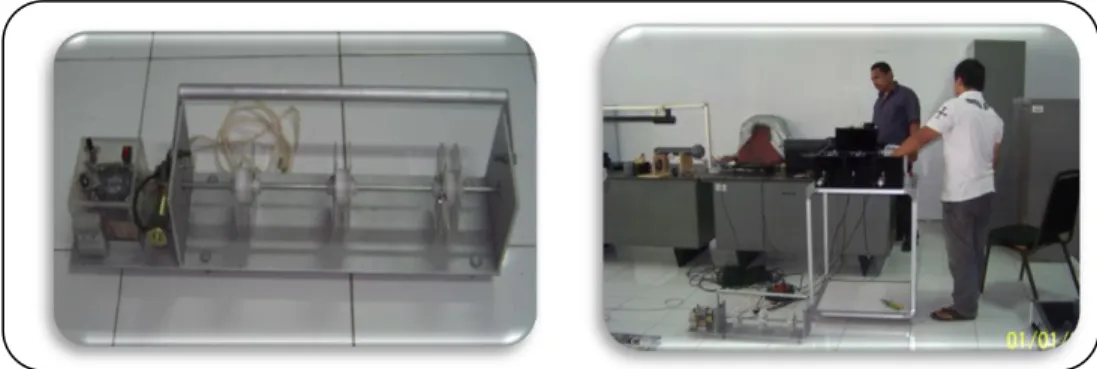
23 3.6. Uji Coba Skala Lab
Untuk melakukan uji coba skala lab perlu dipersiapkan atau dirancang terlebih dahulu peralatan simulasi yang diharapkan dapat memberikan hasil pengujian serta gambaran yang sesuai dengan kondisi saat pelaksanaan di lapangan, yaitu 3 buah replika sumur bor dan simulasi fluktuasi muka air.
Bahan simulasi :
Replika sumur bor : pipa acrylik Φ2’ inc x 2 meter, Aluminium hollow, joint, hard nylon, neple, bangku tangga
Simulasi fluktuasi muka air : pompa air, slang 5/8, pipa PVC, stop kran, neple, tangki air 100 lt.
Simulasi dilakukan dengan cara menempatkan ke tiga unit mekanik otomatis level air di atas bangku tangga dengan posisi handle pelampung tepat pada permukaan lubang tabung replika sumur bor. Untuk menciptakan simulasi muka air saat kambuh (recovery) dilakukan pemompaan air dari tangki ke dalam tabung replika melalui slang dan neple yang telah dipasang di bawah tabung. Sedangkan untuk simulasi saat pemompaan (pumping) dilakukan dengan cara mematikan pompa sehingga air akan kembali kedalam tangki dengan demikian akan terjadi penurunan muka air dalam tabung replika. Kecepatan rambat muka air/ fluktuasi dapat diatur melalui stop kran.
Replika Sumur Bor Seting peralatan Monitoring dan perekaman
Gambar 3.21 Uji Coba Simulasi AWLMS
24 3.6. Uji Coba Lapangan
Uji coba peralatan Automatic Water Level Monitoring System (AWLMS) di lapangan dilaksanakan di PTBA Bukit Asam Unit Pelabuhan Tarahan. Selain memiliki banyak sumur bor Lokasi ini sangat refresentatip serta ideal untuk kegiatan ini karena untuk dapat terselenggaranya uji coba peralatan AWLMS diperlukan paling tidak 1 (satu) lubang sumur produksi (production well) dan 2 (dua) lubang sumur pengamat (obsevation well). Prinsip kerjanya adalah untuk merekam data aktivitas pemompaan, antara lain; debit aliran air tanah pada sumur produksi dan fluktuasi level muka airtanah pada sumur pantau. Untuk kelancaran uji coba alat tersebut perlu persiapan dan instal peralatan baik perangkat keras maupun perangkat lunak (Tabel 3.1.).
NO SUMUR KEGIATAN
Level Muka Air Tanah
(meter)
BUTOM (meter)
1. 7
(Pantau) Pengukuran awal MAT Flushing I 9.7 56.3 Pengukuran MAT setelah flushing I 22.15 57.2 Flushing II
Pengukuran MAT setelah flushing II 17.50 57.2 Pemasangan pipa PVC 1.5 inch
Pemasangan alat ukur MAWL ‘C’ dan tenda pelindung
Pemasangan kabel data
2. 6
(Produksi)
Pengukuran awal MAT 36 57.3 Pemasangan pipa PVC 1.5 inch
Pemasangan Waterflow Meter
Pemasangan alat ukur MAWL ‘A’ dan tenda pelindung
Pemasangan kabel data
3. 5
(Pantau) Pengukuran awal MAT Flushing I 18 47.3 Pengukuran MAT setelah flushing I 16 52 Pemasanagan pipa PVC 1.5 inch
Pemasangan alat ukur MAWL ‘B’ dan tenda pelindung
Pemasangan kabel data
4. Base camp
(Monitoring) - - Pemasangan tenda Pemasangan RTU
- Pemasangan monitor perekam - Pemasangan kabel data
Tabel 3.1.
25
Gambar 3.22
Mekanisme Pengambilan Data Pumping Test di Lapangan
26 Gambar 3.23
Kegiatan Uji Coba Lapangan Automatic Water Level Monitoring System (AWLMS)
Uji pemompaan dilakukan secara bertahap, dari hasil perekaman uji coba pemompaan (pumping test) dapat diketahui data debit aliran airtanah dan fluktuasi level muka air tanah seperti gambar 3.24, 3.25, 3.26, 3.27.
Pemasangan pompa submersible
Pemasangan Water Flow Meter
Pemasangan ceesing pelampung
Penempatan mekanik otomatis water level
ter level
27 Gambar 3.24
28 Gambar 3.25
29 Gambar 3.26
30 Gambar 3.27
11 BAB III
PROGRAM KEGIATAN
3.1. Rancangan Mekanik Otomatis Level Air (Hardware).
Rancang bangun peralatan otomatisasi sistem pengambilan data pumping test melibuti 3 blok pekerjaan diantaranya :
- Pembuatan mekanik otomatis level air - Pembuatan perangkat elektronika - Pembuatan software
Pembuatan mekanik otomatis level air dimulai dari perancangan/disain badan alat, pelampung, speed motor controller, gear, pulley, roller dan lay out (tata letak peralatan).
Gambar 3.1.
Rancangan Mekanik Otomatis Level Air
Tampak atas Tampak samping 52 cm 15 cm 8 7 11 12 1 7 c m 10 6 13 3 2 9 5 4 1 1. Pelampung 2. Kawat sling 0.3mm 3. Pulley 4. Handle 5. Pulley 10. Power suply 11. Belt 12. Gulungan kawat sling 13. Microcontroller 6. Pengatur otomatis kecepatan motor 7. Encoder 8. Pulley 9. Motor
12 Bahan dan alat yang digunakan :
Pelampung : Pvc, nylon, besi pemberat
Handle : Plat stainless 1 mm
Kawat sling : Baja elastis 0.3 mm
Pulley : Nylon
Pengatur otomatis : Potensio geser 10k, switcing, as stainles kecepatan motor 4 mm, pulley, nylon, acrylic, pegas
Sensor : Rotary Encoder Incramental Motor : Motor power window mobil 12 volt Power suply dan charger : Trafo 5A, regulator, acrylic, kipas.
Belt : Karet timing belt
Gulungan kawat sling : Nylon, bearing. As stainless
3.1.1. Pelampung (Float)
Pembuatan pelampung harus memperhitungkan berat pelampung yang disesuaikan dengan berat minimal/maksimal daya tekan pegas yang terdapat pada alat pengatur arah serta kecepatan motor (Automatic speed motor controller) serta diameter yang tidak melebihi diameter sumur uji.
3.1.2. Handle
Handle adalah bagian dari mekanik untuk mengarahkan posisi pelampung pada lubang sumur uji yang dilengkapi dengan bearing pulley agar dapat memperkecil hambatan akibat gesekan kawat.
Bahan bahan yang digunakan : plat stainless 1mm, nylon, bearing dan as stainless 4mm Gambar 3.2 Float (Pelampung) 50 cm 1 inch Pipa PVC Besi pemberat Dop bawah Dop atas
13 3.1.3. Pengatur Otomatis Kecepatan Dan Arah Putaran Motor (Automatic Speed Motor
Controller)
Instrumen ini merupakan komponen utama dalam perancangan alat yang berfungsi untuk mengatur arah putaran serta kecepatan motor secara otomatis sehingga dapat menarik (menggulung) atau mengulur kawat seling sesuai dengan kecepatan perubahan pelampung pada level muka air. Penggunaan pegas berdasarkan hukum Hooke “pegas akan melakukan gaya terhadap gaya yang menariknya dan arahnya selalu berlawanan dengan arah pergeserannya”. Besarnya gaya berbanding terbalik dimana pegas akan bekerja sesuai dengan perubahan berat pelampung akibat terjadinya penurunan muka air atau sebaliknya
. F : Gaya
F = -Kx
- : Berbanding terbalik K : Konstanta pegas x : Jarak pergeseran W : DayaW = ½Fx
F : Gaya x : Jarak pergeseran Gambar 3.3 Penampang Handle Tampak atas Tampak samping 15 cm Tampak depan Gambar 3.4Rancangan Automatic Speed Motor Controller
Pulley Stang potensio Switch Potensio geser Pegas Ceesing
14 3.1.4. Modifikasi Roda Gigi (Gear) Motor Penggerak
Motor penggerak yang dipergunakan untuk memutar roll sling adalah motor 12 volt power window kendaraan roda empat. Agar dapat dipasang rantai karet maka perlu dilakukan modifikasi pada roda gigi (gear) motor sesuai dengan ukuran/interval gigi pada gear roler . Tujuannya agar tidak terdapat speeling atau jeda pada saat motor mulai bergerak.
Bahan yang digunakan adalah aluminium silinder solid kemudian dibentuk (dibubut) sehingga membentuk seperti gambar di bawah :
Gambar 3.5
Modifikasi Roda Gigi (gear)
3.1.1
Penggulung Kawat (Roller)Pembuatan roller dengan roda gigi (gear) dimaksudkan untuk menggulung atau mengulur kawat sling pada saat pelampung dalam posisi turun atau sebaliknya. Kedalaman sumur baik butom maupun level air diambil rata-rata mencapai 200 meter. Oleh karena itu ukuran gulungan kawat sling harus disesuaikan dengan volume/panjang kawat yang akan digulung sepanjang 200 meter berdiameter 0.3 mm.
25 mm 7 mm 11 mm
Tampak depan Tampak belakang
4 mm Tampak samping 5,4 mm 20,7 mm 20 mm Gambar 3.6. Roller 4 0 m m Bearing (20 mm) 10 0 mm 90 mm 15 mm R in g (9 0 mm ) Gear (7 8 mm ) 65 mm
15 3.2 Rancangan Perangkat Elektronika
3.2.1. Battery Charger
Pelaksanaan uji pemompaan step draw-down test dan long term test berdurasi 72 jam secara terus menerus. Untuk menjamin kontinuitas power supply battery DC 12 Volt yang dibutuhkan oleh rotary encoder dan micro controller maka, perlu dibuat battery charger yang dapat menjaga kesetabilan tegangan pada battery.
Gambar 3.7
Skema Elektronika dan Fisik Battery Charger
3.2.2. Regulator Power Suply
Regulator power supply adalah perangkat elektronik yang dirancang untuk merubah tegangan 220 V menjadi DC 12 V sehingga dapat mengatur kecepatan maksimal/minimal motor.
Gambar 3.8
16 3.2.3. Speed Motor Controller
Pada saat terjadinya penurunan muka air tanah akibat dari pemompaan ataupun sebaliknya pada saat kambuh (recovery) maka, pelampung harus dapat mengikuti laju perubahan muka air tersebut. Oleh karena itu harus dirancang perangkat elektronik yang dapat mengatur perubahan arah maupun kecepatan putaran motor secara otomatis.
Gambar 3.9
Skema Elektronika Speed Motor Controller
3.2.4. Micro Controller
Mikrokontroler adalah Central Processing Unit (CPU) yang disertai dengan processor, memori serta sarana input atau output dan dibuat dalam bentuk chip. Alat ini ditempatkan pada mekanik automatic water level untuk membaca setiap putaran pada rotary encoder kemudian mengirimkannya melalui kabel data ke Remote Terminal Unite (RTU).
Gambar 3.10
17 3.2.5. Remote Terminal Unite
Remote Terminal Unite (RTU) adalah perangkat elektronik yang terdiri dari 4 buah micro controller ( 3 unit micro controller automatic water level, 1 unit micro controller flow meter) dilengkapi dengan conector DB 9 dan USB Serial cable input.
Gambar 3.11 Remote Terminal Unit (RTU)
3.3. Rancangan Aplikasi Software AWLMS (Automatic Water Level Monitoring Sistem)
Untuk mendukung terciptanya otomatisasi sistim pengambilan data pumping test maka harus dirancang perangkat lunak (software) sistim monitoring dan perekaman data yang terintegrasi dari dua atau lebih mekanik otomatis level air dan waterflow meter serta dapat ditampilkan dalam bentuk visual baik grafik maupun database (tabulasi) seperti Gambar 3.12, 3.13, 3.14.
Gambar 3.12
18 Gambar 3.13
Gambar Tampilan Software Grafik
Gambar 3.14
19 3.4. Kalibrasi Peralatan
a. Mekanik Otomatis Level Air
Sebelum melakukan uji coba peralatan di lapangan perlu dilakukan tahap kalibrasi peralatan mekanik otomatis level air. Hal ini untuk mengetahui seberapa jauh tingkat sensitivitas, akurasi dan unjuk kerja peralatan tersebut terhadap kondisi aktual dilapangan. Untuk memudahkan kalibrasi serta menghasilkan tingkat keakurasiaan yang baik maka perlu dirancang alat bantu kalibrasi seperti terlihat pada (Gambar 3.15 ).
Peralatan yang akan dikalibrasi berjumlah 3 unit Mekanik otomatis level air ( A, B dan C) dengan cara melakukan pengukuran setiap perubahan jarak yang dioperasikan menggunakan alat bantu kalibrasi sebanyak 30 kali dengan pendekatan fungsi linear dari suatu nilai sumbu x terhadap nilai sumbu y.
Gambar 3.16
Mekanik Otomatis Water Level Gambar 3.15
20 Berdasarkan hasil kalibrasi diperoleh persamaan serta grafik seperti terlihat pada (Gambar 3.18, 3.19, 3.20).
Gambar 3.17
Grafik Mekanik Otomatis Level Air A (Enc-A)
Gambar 3.18
21 b. Water Flow Meter
Untuk mengkalibrasi water flow meter diperlukan beberapa peralatan pendukung seperti tangki air volume 250 s.d 500 liter, water pump, takaran air 5 liter, stop kran, water pas serta pipa PVC.
Kalibrasi dengan cara dilakukan pemompaan dari tangki air kemudian diukur setiap perubahan level air (volume) terhadap fungsi waktu sebanyak 30 kali. (Gambar 3.21)
Gambar 3.19
Grafik Mekanik Otomatis Level Air C (Enc-C)
Gambar 3.21
Waterflow Meter
Gambar 3.20
22 3.5. Uji Coba Skala Lab
Untuk melakukan uji coba skala lab perlu dipersiapkan atau dirancang terlebih dahulu peralatan simulasi yang diharapkan dapat memberikan hasil pengujian serta gambaran yang sesuai dengan kondisi saat pelaksanaan di lapangan, yaitu 3 buah replika sumur bor dan simulasi fluktuasi muka air.
Peralatan simulasi terbuat dari :
Replika sumur bor : pipa acrylik Φ2’ inc x 2 meter, Aluminium hollow, joint, hard nylon, neple, bangku tangga
Simulasi fluktuasi muka air : pompa air, slang 5/8, pipa PVC, stop kran, neples, tangki 100 lt,
Simulasi dilakukan dengan cara menempatkan ke tiga unit mekanik otomatis level air di atas bangku tangga dengan posisi handle pelampung tepat pada permukaan lubang tabung replika sumur bor. Untuk menciptakan simulasi muka air saat kambuh (recovery) dilakukan pemompaan air dari tangki ke dalam tabung replika melalui slang dan neple yang telah dipasang di bawah tabung. Sedangkan untuk simulasi saat pemompaan (pumping) dilakukan dengan cara mematikan pompa sehingga air akan kembali kedalam tangki dengan demikian akan terjadi penurunan muka air dalam tabung replika. Kecepatan rambat muka air/ fluktuasi dapat diatur melalui stop kran.
Replika Sumur Bor Seting peralatan Monitoring dan perekaman
Gambar 3.22 Uji Coba Simulasi AWLMS
23 3.6. Uji Coba Lapangan
Pelaksanaan uji coba peralatan Automatic Water Level Monitoring System (AWLMS) di lapangan diperlukan 1 (satu) lubang sumur produksi (production well) dan 2 (dua) lubang sumur pengamat (obsevation well). Prinsip kerjanya adalah untuk merekam data aktivitas pemompaan, antara lain; debit aliran air tanah pada sumur produksi dan fluktuasi level muka airtanah pada sumur pantau. Untuk kelancaran uji coba alat tersebut perlu persiapan dan instal peralatan baik perangkat keras maupun perangkat lunak (Tabel 3.1.).
NO SUMUR KEGIATAN
Level Muka Air Tanah
(meter)
BUTOM (meter)
1. 7
(Pantau)
Pengukuran awal MAT 9.7 56.3
Flushing I
Pengukuran MAT setelah flushing I 22.15 57.2 Flushing II
Pengukuran MAT setelah flushing II 17.50 57.2 Pemasangan pipa PVC 1.5 inch
Pemasangan alat ukur MAWL ‘C’ dan tenda pelindung
Pemasangan kabel data
2. 6
(Produksi)
Pengukuran awal MAT 36 57.3
Pemasangan pipa PVC 1.5 inch Pemasangan Waterflow Meter
Pemasangan alat ukur MAWL ‘A’ dan tenda pelindung
Pemasangan kabel data
3. 5
(Pantau)
Pengukuran awal MAT 18 47.3
Flushing I
Pengukuran MAT setelah flushing I 16 52
Pemasanagan pipa PVC 1.5 inch
Pemasangan alat ukur MAWL ‘B’ dan tenda pelindung
Pemasangan kabel data 4. Base camp
(Monitoring) - - Pemasangan tenda Pemasangan RTU
- Pemasangan monitor perekam - Pemasangan kabel data
Tabel 3.1.
24
Gambar 3.23
Peta Potensi Air Tanah Lampung Tengah
Gambar 3.24
Mekanisme Uji Coba AWLMS di Lapangan
25 Gambar 3.25
Uji Coba Lapangan Automatic Water Level Monitoring System (AWLMS)
Uji pemompaan dilakukan secara bertahap, dari hasil perekaman uji coba pemompaan (pumping test) dapat diketahui data debit aliran airtanah dan fluktuasi level muka airtanah seperti gambar
Pemasangan pompa submersible
Pemasangan ceesing pelampung
Penempatan mekanik otomatis water level
ter level
Monitoring
26 Gambar 3.26
27 Gambar 3.27
28 Gambar 3.28
29 Gambar 3.29
30 IV. METODOLOGI
Untuk mendukung dan mendapatkan hasil yang maksimal dalam kegiatan rancang bangun alat otomatisasi sistem pengambilan data pumping test, perlu dilakukan kajian instrumen peralatan, kajian teoritis serta beberapa tahapan kegiatan yang menitik beratkan pada sistem dan unjuk kerja alat sehingga dapat membaca dan merekam secara otomatis kondisi debit aliran air (Q) dan level muka air tanah (WL) pada sumur produksi (production well) dan level
muka air tanah (WL) pada sumur pantau (observation well) saat dilakukan uji pemompaan. (Lihat
Gambar 4.1).
Gambar 4.1.
31 Gambar 4.2
32
BAB VPEMBAHASAN
5.1. Sinkronisasi Sistem
Sistem pemantauan dan perekaman debit aliran airtanah dan level muka airtanah saat aktivitas uji pemompaan dilakukan pada sumur produksi (production well). Salah satu tujuan uji pemompaan ini adalah mencari debit aliran airtanah yang optimal, dimana terhadap adanya sinkronisasi antara besarnya debit aliran yang diambil dengan aliran airtanah yang masuk kedalam sumur melalui lapisan-lapisan akuifer dan saringan (screen) yang mempunyai fungsi linier.
Sinkronisasi pengukuran debit aliran fluktuasi level muka air dapat dilakukan dengan uji coba pemompaan (pumping test), yaitu dengan melakukan pengukuran yang bekerja secara otomatis dengan pendekatan simulasi terhadap sinkronisasi debit aliran dan level muka air.
Berdasarkan hasil pemantauan dan perekaman uji coba di lapangan saat aktivitas pemompaan air tanah dapat diketahui bahwa level muka air tanah pada sumur produksi dan sumur pantau ternyata tidak saling memberikan respon yang signifikan artinya lapisan akuifer yang ada dapat dikatagorikan mempunyai sistem akuifer tidak saling berhubungan. Dengan demikian unjuk kerja peralatan otomatisasi pengambilan data pumping test mulai dari mekanik otomatis water level baik pada sumur produksi dan sumur pantau serta sistem pemantauan dan perekaman datanya dapat berjalan dengan baik sesuai dengan rencana.
5.2. Pengukuran Debit Aliran (Water Flow Discharge) dan Water Level
a. Pada Sumur Pantau 01
Berdasarkan hasil pengukuran ke 58 dan ke 883 sebagai contoh data debit pemompaan dengan menggunakan powogaz flow meter dan mekanik otomatis level air dengan selang waktu 120 menit dapat diketahui bahwa tabulasi data monitoring debit aliran air berkisar antara 0,072 s.d 0,179 liter/detik dan penurunan level muka air tanah antara -97,670mm s.d -74.782 mm dengan menggunakan software Automatic Water Level Monitoring System (AWLMS), maka hasil pengukuran debit aliran air tersebut dapat dilihat pada display monitoring. (Gambar 5.1)
33
Gambar 5.1Pengukuran Debit Aliran Air Tanah Dan Fluktuasi Level Muka Air Pada Sumur Pantau 01
b. Pada Sumur Pantau 02
Hasil pengukuran ke 23 dan ke 824 dapat diketahui bahwa tabulasi data monitoring debit aliran air berkisar antara 0,399 s.d 0,213 liter/detik dan penurunan level muka air tanah antara -57,119mm s.d -39.242mm. (Gambar 5.2)
34
Gambar 5.2Pengukuran Debit Aliran Air Tanah Dan Fluktuasi Level Muka Air Pada Sumur Pantau 02
c. Pada Sumur Produksi
Hasil pengukuran ke 28 dan ke 897 dapat diketahui bahwa tabulasi data monitoring debit aliran air berkisar antara 0,694 s.d 0,708 liter/detik dan penurunan level muka air tanah antara 202,437mm s.d -119.357mm (Gambar 5.3)
35
Gambar 5.336
BAB VIKESIMPULAN DAN SARAN
6.1. Kesimpulan
Berdasarkan hasil pemantauan dan perekaman uji coba di lapangan saat aktivitas pemompaan air tanah dapat diketahui bahwa level muka air tanah pada sumur produksi dan sumur pantau ternyata tidak saling memberikan respon yang signifikan artinya, lapisan akuifer yang ada dapat dikatagorikan mempunyai sistem akuifer tidak saling berhubungan. Namun berdasarkan unjuk kerja peralatan baik pada sumur produksi dan sumur pantau, bahwa sistem pemantauan dan perekaman datanya dapat berjalan dengan baik.
Terciptanya satu unit alat uji pemompaan (pumping test) secara otomatis yang terdiri dari, 3 unit mekanik otomatis level air, 1 buah Remote Terminal Unit (RTU), 1 perangkat software pemantau dan perekam data, merupakan hasil inovasi selangkah lebih maju karena dapat dipergunakan kegiatan pumping test dalam berbagai kondisi lapangan
.
6.2. Saran
Untuk menyempurnakan hasil rancang bangun otomatisasi sistem pengambilan data ‘pumping test’ perlu dilanjutkan ke tahap selanjutnya yaitu ‘pengembangan otomatisasi sistem pengambilan data pumping test dengan sistem telemetri radio modem serta penggunaan inverter untuk perubahan kecepatan pemompaan’.
37
DAFTAR PUSTAKA David G. Alciatore, Michael B. Histand, “Introduction to Mechatronics and Meadurement Systems”, 2009.
Dian Artanto, “Merakit PLC dengan Mikrokontroler + CD, Elex MediaKomputindo, 2009 Endra Pitowarno,“Robotika Disain, Kontrol, dan Kecerdasan Buatan”, EEPIS ITS, 2008 Fetter, C.W,”Applied Hidrogeology”, third edition, Merrill Pubs, Co, Columbus Ohio United
States Of America, 1994
G.P. Kruseman, N.A de Ridder and J.M. Verweij, “ Analysis and Evaluation of Pumping Test data”, International Institute For Land Reclamation and Improvement, second edition, University of Amsterdam, 1991
Karen J. Dawson and Jonathan D. Istok, “Aquifer Testing, Design and Analysis of Pumping and Slug Tests”, Departement of Civil Engineering Oregon State University Corvallis Oregon, Michigan, United state of America, 1991.
Leon W/CouchII, Digital and Analog Comunication System, Prentice Hall, 1997 Sukiswo, “Perancangan Telemetri suhu dengan modulasi digital FSK-FM”, Universitas
Dipenogoro, 2001.
Cybernet : http://id.wikipedia.org/wiki/Mekatronik
Cybernet:http://k12008.widyagama.ac.id/mekatronika/diktatpdf/baB1_pengantar_mek atronika.pdf