Pemodelan dan Simulasi Dinamika RKX200 Pada
Sistem Autopilot dan Pengujian Melalui
Hardware-In-The-Loop Simulation
Alfi Nurhafid
School of Electrical Engineering and Informatics
Bandung Institute of Technology, Ganesha Street 10, Bandung 40132, Indonesia
Abstract—Model dinamika ini memodelkan seluruh sikap roket baik yang harus diestimasi oleh sistem navigasi maupun yang dapat diimplementasikan pada sensor IMU dan sensor GPS berupa percepatan, kecepatan angular, dan posisi model roket. Model dinamik dirancang dengan aerodinamika gerak badan dengan persamaan gerak enam derajat kebebeasan menggunakan perangkat lunak Simulink. Model ini terdiri dari model linear dan model non-linear yang akan digabungkan dengan sistem navigasi dan sistem kendali terbang. Kemudian diintegrasikan menjadi sistem autopilot.
Hasil integrasi sistem autopilot ini akan dilihat pada visualisasi berupa perangkat lunak simulator terbang FlightGear. Pada perangkat lunak ini akan menampilkan gerakan roket secara nyata sesuai dengan hasil keluaran sistem autopilot. Pengujian sistem autopilot melalui Hardware-In-The-Loop Simulation
(HILS).
Keywords— pemodelan, HILS, kendali terbang, navigasi, flightgear.
I. INTRODUCTION
Indonesia sebagai negara yang memiliki wilayah yang luas sangat rawan terhadap gangguan luar baik di darat, laut, maupun udara. Untuk mengatasi masalah ini dibutuhkan suatu alat pertahanan yang dapat mencegah gangguan tersebut dengan cepat dan akurat. Salah satu jenis alat utama sistem senjata (alutsista) yang memiliki kemampuan tersebut adalah roket, terutama roket kendali.
Terdapat 3 aspek penting pada roket kendali, yaitu sistem
aerodinamika atau modeling, sistem kendali terbang atau
autopilot dan sistem navigasi. Sistem autopilot dan navigasi pada roket kendali memungkinkan roket untuk melakukan manuver, mengintersep target bergerak, atau mengikuti lintasan tertentu. Sedangkan sistem aerodinamika lebih
kepada pemodelan roket, sistem yang memberikan
karakteristik roket ketika diberi masukan berupa defleksi. Pada tugas akhir ini penulis akan menjelaskan pada bagian pemodelan roket.
Sistem roket kendali perlu diuji agar didapatkan sistem dengan kinerja yang baik. Pengujian berulang-ulang secara langsung pada roket membutuhkan biaya yang cukup besar serta mengancam keamanan pada daerah pengujian. Pengujian dilakukan dengan suatu metode yang memungkinkan kinerja awal sistem dapat diuji tanpa perlu secara langsung
diterbangkan pada roket. Metode ini dikenal dengan nama Hardware In the Loop Simulation (HILS)
Untuk mendapatkan gambaran nyata karakteristik roket saat dikendalikan pada HILS maka diperlukan bentuk visualisasi sikap roket secara nyata. Bentuk nyata karakteristik
roket akan ditampilkan menggunakan FlightGear yang
merupakan perangkat lunak simulator terbang berbentuk game.
II. ANALYSIS AND SYSTEM DESIGN
A. Penentuan Koefisien Aerodinamik
Berikut desain koefisein aerodinamik yang merupakan
gradient untuk kondisi tertentu. Koefisien axial (CA) terdiri
dari 𝐶𝐴𝑟, 𝐶𝐴𝑀, 𝐶𝐴𝛿𝑒 dan 𝐶𝐴𝛼, koefisein normal (CN) terdiri dari
𝐶𝑁𝑟, 𝐶𝑁𝑀, 𝐶𝑁𝛿𝑒, 𝐶𝑁𝛼, dan koefisien momen pitch (Cm) terdiri
dari 𝐶𝑚𝑟, 𝐶𝑚𝑀, 𝐶𝑚𝛿𝑒, 𝐶𝑚𝛼, 𝐶𝑚𝛼̇, dan 𝐶𝑚𝑞 [3]. Nilai koefisien
pada state-space merupakan nilai pada kondisi tertentu.
Berikut nilai koefisien yang telah diturunkan berdasarkan
tabel koefisien untuk kondisi mach 0.6 dan alpha 5.5o.
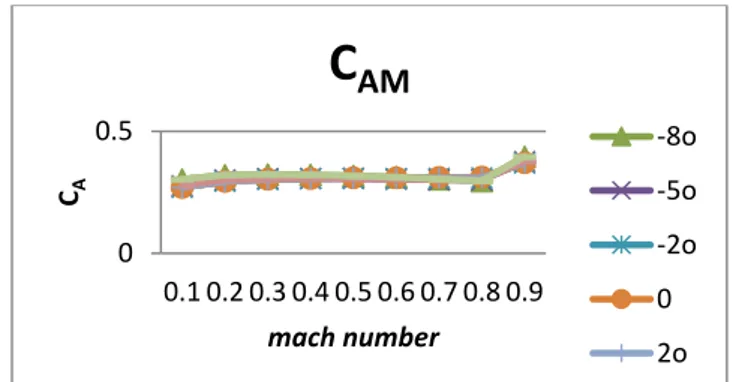
𝑪𝑨𝑴 adalah besarnya perubahan koefisein aerodinamika
CA terhadap perubahan mach [4]. Berikut ini adalah grafik
perubahan CA terhadap mach number RKX200 stage 2 untuk
sudut -8o, -5o, -2o, 0o, 2o, 5o, 8o. Nilai sudut serang yang lain
dapat dilihat pada tabel data nilai CA terhadap mach number
RKX-200 stage 2 di lampiran A referensi [1]. Secara umum
perubahan CA terhadap mach number (M<0.9) untuk berbagai
nilai sudut serang memiliki pola yang sama.
Gambar 1 Grafik perubahan CA terhadap perubahan mach number untuk sudut serang -8o, -5o, -2o, 0o, 2o, 5o, 8o 0 0.5 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 CA mach number
C
AM
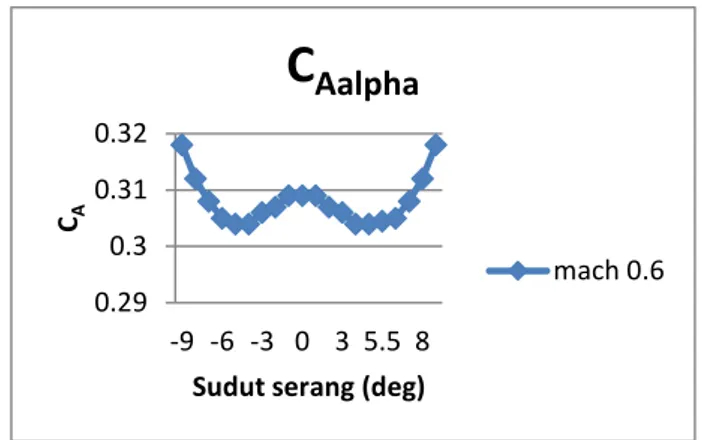
-8o -5o -2o 0 2o𝑪𝑨𝜶adalah koefisien CA terhadap perubahan sudut serang.
Pada grafik menunjukkan nilai CA terhadap perubahan sudut
serang pada mach 0.6. Dengan cara yang sama dapat
ditentukan 𝑪𝑨𝜶saat alpha antara 4o dengan 6o
Gambar 2 Grafik perubahan nilai CA terhadap perubahan sudut serang pada
mach number 0.6
𝑪𝑨𝜹𝒆 adalah perubahan koefisien momen pitch roket
terhadap perubahan defleksi elevator (δe) [4]. Pada gambar 3
terlihat 𝑪𝑨𝜹𝒆tidak linear dari defleksi -15o s.d. 15o, sehingga
untuk alpha -8o, -5o, -2o menggunakan linearisasi pada
defleksi -15o s.d. 0o, alpha 8o, 5o, 2o menggunakan linearisasi
pada defleksi 0o s.d. 15o, dan alpha 0o pada defleksi -5o s.d. 5o.
Dengan mengolah data perubahan CM roket terhadap
perubahan defleksi elevator, maka dapat diperoleh:
Gambar 3 Grafik perubahan nilai CA terhadap perubahan defleksi elevator, pada mach number 0.6 untuk sudut serang -8o, -5o, -2o, 0o, 2o, 5o, 8o B. Penentuan Kondisi Linearisasi
Dalam melakukan desain, penulis akan membuat sistem
linear berupa state-space untuk berbagai kondisi dengan
persamaan merujuk pada referensi [3]. Hal tersebut berguna
untuk sistem kendali terbang dalam mendesain gain
scheduling. Kondisi linearisasi merupakan kondisi untuk
perubahan mach number terhadap ketinggian dengan sudut
serang yang sama, namun perlu dianalisis dinamika plant
untuk perubahan tersebut, jika dinamika nya kecil maka penggunaan kondisi linearisasi untuk perubahan tersebut tidak
berguna. Untuk mach number desain dilakukan pada mach
number 0.6 dan 0.9 dengan variasi ketinggian 0 m , 1000 m, dan 2000 m.
Alternatif lain, jika hal tersebut terjadi yaitu dengan membuat kondisi linearisasi untuk perubahan sudut serang (α)
untuk mach dan ketinggian yang sama. Hal tersebut diperkuat
dengan hasil plotting koefisien terhadap perubahan alpha
yang tidak linear. Nilai sudut serang yang digunakan yaitu nilai dirasa memenuhi sifat linear setelah di plot pada grafik koefisien yang berubah terhadap sudut serang itu sendiri,
misalnya 𝐶𝐴𝛼. Nilai sudut serangnya adalah -8o, -5o, -2o, 0o, 2o,
5o, 8o. Pada table 1 sudah diturunkan nilai koefisien
aerodinamik untuk berbagai kondisi sudut serang. Nilai koefisien aerodinamik untuk berbagai kondisi linearisasi sudut serang dirangkum pada tabel 1. Nilai pada tabel tersebut sudah berada pada satuan per radian.
Kon disi α (de g) Ra ta 𝑪𝑨𝜶 𝑪𝑵𝜶 𝑪𝒎𝜶 𝑪𝑨𝑴 𝑪𝑵𝑴 𝑪𝒎𝑴 𝑪𝑨𝜹𝒆 𝑪𝑵𝜹𝒆 𝑪𝒎𝜹𝒆 𝑪𝒎𝒒 𝑪𝒎𝜶̇ 1 s.d. --9 6 -8 -0.2 48 14.9 9 -5.59 5 -0.06 5 -0.16 5 0.36 5 -0.23 3 1.76 6 -5.90 5 -104. 057 -20.1 69 2 s.d. --6 4 -5 -0.0 28 14.4 96 -5.41 0 -0.02 5 -0.14 5 0.20 5 -0.23 3 1.75 3 -5.85 7 -103. 369 -20.1 69 3 s.d. --4 1 -2 0.0 955 13.3 12 -5.36 6 0 -0.08 5 0.1 -0.22 9 1.74 7 -5.84 0 -102. 051 -20.1 69 4 -1 s.d. 1 0 0 11.631 -5.17 4 0.00 5 0 0.04 0 1.74 5 -2.92 0 -102. 968 -20.1 69 5 s.d. 1 4 2 -0.0 95 13.3 12 -5.36 6 0 0.08 5 -0.04 0.23 3 1.74 7 -5.84 0 -104. 229 -20.1 69 6 s.d. 4 6 5 0.0 28 14.4 9 -5.41 0 -0.02 5 0.14 5 -0.13 5 0.23 3 1.75 3 -5.85 7 -105. 031 -20.1 69 7 s.d. 6 9 8 0.2 48 14.9 95 -5.59 5 -0.06 5 0.16 5 -0.24 0.23 3 1.76 6 -5.90 5 -104. 401 -20.1 69
Tabel 1 Daftar koefisien aerodinamika untuk longitudinal dengan berbagai sudut serang
Nilai koefisien aerodinamika untuk mach number yang berbeda-beda diperlihatkan pada tabel 2
Kon disi mach (deg) 𝑪𝑨𝜶 𝑪𝑵𝜶 𝑪𝒎𝜶 𝑪𝑨𝑴 𝑪𝑵𝑴 𝑪𝒎𝑴 𝑪𝑨𝜹𝒆 𝑪𝑵𝜹𝒆 𝑪𝒎𝜹𝒆 𝑪𝒎𝒒 𝑪𝒎𝜶̇ 1 0.6 -0.0 28 13.9 49 0.4 51 -0.0 25 0.1 45 -0.0 34 0.2 33 1.7 53 -5.85 7 -105.0 31 -20.1 69 2 0.9 -0.2 57 13.9 36 0.4 41 0.7 6 0.1 6 -0.0 4 0.3 32 2.0 28 -6.76 9 -118.7 26 -19.7 68 Tabel 2 Daftar koefisien aerodinamika untuk longitudinal dengan berbagai
mach number yang berbeda.
III. IMPLEMENTATION AND TESTING
A.
Implementasi Sistem LinearImplementasi sistem linear menggunakan metoda state-space
yang dipisahkan menjadi 2 matra, yaitu matra longitudinal dan
matra lateral-direksional [4]. State-space diturunkan
berdasarkan persamaan gerak newton-euler dan koefisien
linearisasi pada desain system [2,6]. Kondisi yang dilinearisasi yaitu sebagai berikut:
Kecepatan terbang (U) = 170 m/s
Ketinggian (h) = 0m, 1000m, dan 1500m Elevasi (θ) = 0o Massa (m) = 51 kg Referensi area (S) = 0.0323 m2 Diameter rata-rata (b) = 0.203 m 0.29 0.3 0.31 0.32 -9 -6 -3 0 3 5.5 8 CA
Sudut serang (deg)
C
Aalpha
mach 0.6 0 0.1 0.2 0.3 0.4 -15 -10 -5 0 5 10 15 CADefleksi elevator (deg)
C
Ade
-8o -5o -2o 0 2o 5oPada matra longitudinal state yang digunakan yaitu u,w,q, dan
θ dan masukan hanya berdasarkan defleksi elevator (δe) [3,5].
[ 𝑢̇ 𝑤̇ 𝑞̇ 𝜃̇ ] = [ −𝜌𝑟𝑉𝑟𝑆 𝑚 𝐶𝐴𝑟− 𝑞̅𝑟𝑆 𝑚𝑎𝑟𝐶𝐴𝑀 − 𝑞̅𝑟𝑆 𝑚𝑉𝑟𝐶𝐴𝛼− 𝑞̅𝑟 −𝜌𝑟𝑉𝑟𝑆 𝑚 𝐶𝑁𝑟 − 𝑞̅𝑟𝑆 𝑚𝑎𝑟𝐶𝑁𝑀+ 𝑞̅𝑟 − 𝑞̅𝑟𝑆 𝑚𝑉𝑟𝐶𝑁𝛼 −𝑤𝑟 −𝑔 cos 𝜃𝑟 𝑢𝑟 −𝑔 sin 𝜃𝑟 𝜌𝑟𝑉𝑟𝑆𝑐 𝐼𝑦𝑦 𝐶𝑚𝑟+ 𝑞̅𝑟𝑆𝑐 𝐼𝑦𝑦𝑎𝑟 𝑞̅𝑟𝑆𝑐 𝐼𝑦𝑦𝑉𝑟𝐶𝑚𝛼 0 0 𝑞̅𝑟𝑆𝑐2 2𝐼𝑦𝑦𝑉𝑟(𝐶𝑚𝑞+ 𝐶𝑚𝛼̇) 0 1 0] × [ 𝑢 𝑤 𝑞 𝜃 ] + [ 𝑞̅𝑟𝑆 𝑚𝐶𝐴𝛿𝑒 𝑞̅𝑟𝑆 𝑚𝐶𝑁𝛿𝑒 𝑞̅𝑟𝑆𝑐 𝑚 𝐶𝑚𝛿𝑒 0 ] 𝛿𝑒
Pada implementasinya penulis menurunkan 7 kondisi
state-space untuk kondisi sudut serang antara -8o, -5o, -2o, 0o, 2o, 5o,
dan 8o pada mach number 0.6. Hal tersebut berdasarkan 𝐶
𝐴𝛼 pada gambar 8 yang tidak linear pada nilai sudut serang
tersebut. Berikut state-space yang diturunkan pada kondisi
sudut serang 5o. [ 𝑢̇ 𝑤̇ 𝑞̇ 𝜃̇ ] = [ −0.03425 −0.00165 −16.31 −9.755 −0.1501 −0.8366 170 −0.939 −0.00368 −0.3967 −0.6523 0 0 0 1 0 ] × [ 𝑢 𝑤 𝑞 𝜃 ] + [ 2.2771 1 17.1563 0 −51.05449 0 0 0 ] [𝛿𝑒 𝑇]
Pada matra lateral-direksional state variabel yang digunakan
yaitu v, p,r, ϕ, dan ψ dan input defleksi aileron (δa) dan
defleksi rudder (δr) [3,5]. Untuk lateral-direksional kondisi
yang digunakan hanya 1 yaitu saat alpha 5.5o dan mach 0.6.
[ 𝑣̇ 𝑝̇ 𝑟̇ 𝜙 𝜓̇ ̇ ] = [ 𝑞̅𝑟𝑆 𝑚𝑉𝑟𝐶𝑌𝛽 𝑤𝑟 −𝑢𝑟 𝑔 cos 𝜃𝑟 𝑔 sin 𝜃𝑟 𝑞̅𝑟𝑆𝑏 𝐼𝑥𝑥′𝑉𝑟𝐶𝑙𝛽̇ 𝑞̅𝑟𝑆𝑏2 2𝐼𝑥𝑥′𝑉𝑟𝐶𝑙𝑝 𝑞̅𝑟𝑆𝑏2 2𝐼𝑥𝑥′𝑉𝑟(𝐶𝑙𝑟+ 𝐶𝑙𝛽) − (𝐼𝑧𝑧− 𝐼𝑦𝑦) + 𝐼𝑥𝑧2 𝐼𝑥𝑥′ 𝑞̅𝑟 0 0 𝑞̅𝑟𝑆𝑏 𝐼𝑧𝑧′𝑉𝑟𝐶𝑙𝛽 𝑞̅𝑟𝑆𝑏2 2𝐼𝑧𝑧′𝑉𝑟𝐶𝑛𝑝+ (𝐼𝑥𝑥− 𝐼𝑦𝑦) + 𝐼𝑥𝑧2 𝐼𝑧𝑧′ 𝑞̅𝑟 𝑞̅𝑟𝑆𝑏2 2𝐼𝑧𝑧′𝑉𝑟(𝐶𝑛𝑟+ 𝐶𝑛𝛽̇) 0 0 0 1 0 0 0 0 0 1 0 0 ] × [ 𝑣 𝑝 𝑟 𝜙 𝜓] + [ 0 𝑞̅𝑟𝑆 𝑚 𝐶𝑌𝛿𝑟 𝑞̅𝑟𝑆𝑏 𝐼′𝑥𝑥𝐶𝑙𝛿𝑎 𝑞̅𝑟𝑆𝑏 𝐼′𝑥𝑥𝐶𝑙𝛿𝑟 𝑞̅𝑟𝑆𝑏 𝐼′𝑍𝑍𝐶𝑛𝛿𝑎 𝑞̅𝑟𝑆𝑏 𝐼′𝑍𝑍𝐶𝑛𝛿𝑟 0 0 0 0 ] × [𝛿𝑎 𝛿𝑟] [ 𝑣̇ 𝑝̇ 𝑟 𝜙̇̇ 𝜓̇] = [ −0.6289 0 −170 9.8 0 0.053511 0.29426 0 −1.288 −0.0334 0 −0.00252 −0.4837 0 1 0 0 0 0 0 0 0 1 0 0] × [ 𝑣 𝑝 𝑟 𝜙 𝜓] + [ 0 18.4061 −163.744 0 0 0 0 −55.017 0 0 ] [𝛿𝑎 𝛿𝑟]
B.
Implementasi Sistem Non-LinearSistem non-linear diimplementasikan menggunakan
perangkat lunak Simulink. Input dari sistem yang dibuat didapat dari flight control berupa defleksi aileron (δa), defleksi elevator (δe), dan defleksi rudder (δr). Sedangkan keluaran dari sistem dapat bermacam-macam namun sebagian besar keluaran dari blok 6DoF (EulerAngles) akan menjadi keluaran dari sistem itu sendiri ditambah keluaran alpha (α), beta (β) dan lain-lain dari proses di dalam sistem.
Parameter yang digunakan sesuai dengan kondisi awal roket ketika dikendalikan yaitu
Ketinggian awal roket berada pada ketinggian 1500
m dari koordinat inersia.
Kecepatan translasi awal pada U adalah 170m/s
sedangkan dua kecepatan translasi lainnya yaitu v dan w dianggap 0 m/s.
Sudut euler awal dianggap masih 0 derajat
Kecepatan rotasi awal benda dianggap 0 m/s
Blok tersebut diintegrasikan dengan dengan blok lainnya seperti blok lingkungan yang sudah diberi efek angin pada
aerospace blockset sehingga memebentuk sistem seperti gambar 4
Gambar 4 Sistem airframe nonlinear RKX200
Koefisien aerodinamik hingga menjadi gaya dan momen aerodinamik di proses pada blok aerodinamik kemudian menjadi masukan bagi blok 6DoF (Euler Angles).
C.
Implementasi FlightGearFlightGear diimplementasikan pada komputer lain yang menerima hasil komputasi Simulink menggunakan kabel UDP. Untuk mengirimkan data dari Simulink menggunakan blok
Pack net_fdm Packet for FlightGear yang berfungsi menerima
masukan dari Simulink dan Send net_fdm Packet to
FlightGear yang berfungsi mengirimkan data ke FlightGear
[7].
Masukan dari Pack net_fdm Packet for FlightGear untuk
posisi roket yaitu pada koordinat geografi untuk GPS yaitu
derajat longitude dan derajat latitude. Pada computer target
yang menjalankan FlightGear dijalankan general run script
berupa runfg.bat yang akan menjalankan file .xml pada
D.
Pengujian Model LinearMetode yang digunakan yaitu memberikan masukan berupa defleksi elevator seperti pada gambar 5. Defleksi yang
digunakan berupa sinyal doublet pada detik ke-5 sampai
dengan detik ke-6 dengan amplitude 5o. Keluaran berupa
kecepatan translasi pada sumbu-X benda (u), kecepatan
translasi pada sumbu-Z benda (w), kecepatan angguk (q),
sudut angguk (θ).
Gambar 5 Metode pengujian sistem linear
Hasil selanjutnya yaitu kecepatan translasi pada sumbu-Z benda (w). Dari gambar 6 nilai kecepatan akan terganggu pada detik ke-5 akibat defleksi elevator yang ditandai dengan garis warna hijau. Defleksi positif elevator mengakibatkan nilai w semakin negatif atau artinya roket ada dorongan ke bawah dari depan pusat massa.
Gambar 6 Sudut angguk dengan gaya dorong dan defleksi elevator
E.
Pengujian Kondisi LinearisasiPengujian kondisi linearisasi ini merupakan pengujian
desain kondisi linear yang diimplementasikan pada
state-space untuk berbagai macam kondisi yang telah dijelaskan
pada bagian desain. Metode pengujian dengan membuat bode
plot untuk berbagai macam kondisi sudut serang dengan
keluaran yang sama, misalnya kecepatan translasi U. Kemudian untuk berbagai macam kondisi ketinggian untuk mach yang sama dan perbedaan mach number untuk ketinggian yang sama.
Pengujian pertama dengan melakukan bode plot kecepatan
translasi w untuk mach yang sama dengan ketinggian berbeda
Mach 0.6 dan ketinggian 0 m, 1000 m, 2000 m
Mach 0.9 dan ketinggian 0 m , 1000 m, 2000 m
Gambar 7 Bode plot kecepatan w untuk perbedaan ketinggian
Pada gambar 7 terlihat bahwa untuk nilai frekuensi yang
bervariasi maka penguatan dan delay phase dapat dikatakan
sama. Hal tersebut membuktikan bahwa untuk membuat kondisi linearisasi dengan variasi ketinggian dinilai tidak efektif.
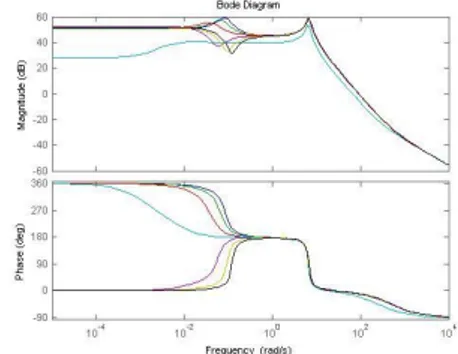
Pada gambar 8 memperlihatkan bode plot kecepatan
translasi w pada state-space untuk mach yang berbeda. Hasil
yang serupa ditunjukkan untuk perbedaan mach number
bahwa dinamika terbang kurang bervariasi sehingga kondisi
linearisasi untuk perubahan mach number tidak efektif.
Gambar 8 Bode plot kecepatan w untuk perbedaan mach number
Gambar 9 Bode plot untuk w berbagai sudut serang dengan mach dan ketinggian yang sama
Hasil bode plot keluaran variabel kecepatan translasi w
untuk variasi sudut serang -8o, -5o, - 2o, 0o, 2o, 5o, dan 8o dengan mach 0.6 dan ketinggian 1500 m dapat dilihat pada gambar 9
Pada gambar 9 dapat dilihat bahwa untuk nilai frekuensi tertentu, nilai penguatan dan phase berbeda. Hal tersebut
dikarenakan dinamika plant sangat bervariasi untuk perubahan
kondisi linearisasi untuk gain scheduling pada sistem kendali terbang dapat dilakukan dengan melakukan variasi pada sudut serang α
F.
Pengujian Model Non-LinearPengujian pada sistem ini dengan memberikan defleksi
aileron, elevator, dan rudder dengan sinyal doublet sebesar 5
derajat. Pengujian dengan memberikan defleksi elevator pada
detik ke-5 sampai dengen ke-6, kemudian defleksi rudder
pada detik ke10 sampai dengan detik ke-11, dilanjutkan
dengan defleksi aileron pada detik ke-15 sampai dengan detik
ke-16.
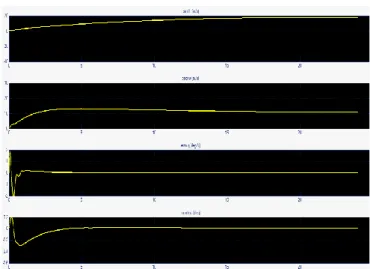
Pada hasil pengujian saat diberi defleksi elevator pertama,
sikap roket akan terdorong kearah theta (θ) negative kemudian
berosilasi dan kembali pada sinyal datar menurun. Defleksi ini semakin menyebabkan sikap roket semakin menukik kearah bawah terhadap koordinat inersia bumi, artinya dengan adanya defleksi positif elevator akan menyebabkan perubahan sikap roket bergerak ke bawah dilihat dari hidung roket [5].
Dengan adanya gangguan defleksi elevator ini juga tidak menyebabkan gangguan pada sikap guling dang geleng roket, sehingga hal tersebut sesuai dengan gerakan dinamika roket yang tidak menghendaki adanya gerakan guling dan geleng untuk defleksi elevator dalam keadaan ideal.
Defleksi rudder menyebabkan gerakan geleng atau yaw
pada grafik ke-4 gambar 10. Analisis persamaan gerak dan
simulasi dilihat pada konfigurasi defleksi positif rudder yang
menyebabkan gerakan geleng roket kearah kiri dari hidung
roket atau negatif yaw. Hal tersebut dapat dilihat pada hasil
simulasi yang menyebabkan adanya sudut yaw kea rah negatif.
Pengujian defleksi aileron menyebabkan gerakan guling roket dapat dilihat pada grafik ke-2 gambar 10. Nilai sudut
guling mencapai 1365o artinya roket berguling 3.8 kali ke kiri.
Gambar 10 Hasil pengujian sikap roket pada model nonlinear dengan berbagai defleksi
Dari gambar 11 dapat dilihat bahwa alpha berosilasi dan
steady-state dengan cepat pada detik ke-10 hal tersebut yang membuat roket stabil yang melawan defleksi yang diberikan.
Gambar 11 Hasil pengujian alpha dan beta pada sistem non-linear dengan defleksi yang sama.
G.
Pengujian Model Non-linear di Titik LinearisasiUntuk meyakinkan apakah model linear yang dibuat merupakan model yang tepat dengan simulasi di titik kerja
tersebut maka perlu diuji error dari pernurunan model linear.
Dengan memberikan kendali pada masukan kedua model
agar mempertahankan θ agar 5.5o maka respon untuk kedua
model tersebut sebagia berikut
Gambar 12 Bagian kiri merupakan respon untuk sistem linear dan bagian kanan merupakan respon untuk model non-linear dengan keluaran U, w, q,
dan θ secara berurutan
Berikut grafik error atau selisih dari kedua hasil agar lebih
Gambar 13 Error keluaran sistem linear dan model Non-Linear
Dari gambar 13 dan 14 nilai keluaran berbeda atau memiliki
error cukup besar untuk U dan w sedangkan nilai q dan θ
memiliki error saat kurang dari 5 detik dan selanjutnya memiliki error 0.
Hal tersebut terjadi karena model linear state-space yang
masih kurang baik untuk state U dan w sedangkan q dan θ
sudah mempresentasikan model non-linear di titik tertentu. Nilai error antara model linear dan model non-linear pada
bagian kecepatan translasi U dan w. Pada error kecepatan
translasi U bereksponensial menuju error 20m/s dari detik 0
hingga detik ke-24. Pada error kecepatan translasi w bergerak
secara eksponensial menuju titik maksimum pada 13m/s kemudian konstan di error 10m/s hingga detik ke-24.
H.
Pengujian FlightGearPengujian FlightGear dengan menjalankan model
non-linear kemudian diteruskan menggunakan blok pada Simulink. Model yang digunakan didesain pada perangkat lunak AC3D seperti pada gambar 15
Gambar 14 Model 3 dimensi roket dengan perangkat lunak AC3D
Model tersebut dimasukkan dengan menggunakan file .xml
yang di simpan pada folder base FlightGear pada komputer
yang menjalankan FlightGear [7].
Gambar 15 Model 3D roket pada FlightGear
IV. KESIMPULAN
Dari analisis yang telah dilakukan pada bab-bab sebelumnya, dapat diambil kesimpulan sebagai berikut:
a. Desain model dinamika 6 derajat kebebasan pada
simulasi sudah berjalan pada perangkat lunak Simulink. Hasil keluaran sikap roket sudah sesuai dengan defleksi yang diberikan dari sistem kendali terbang. Defleksi
positif (+) elevator akan menyebabkan sudut pitch
negatif, defleksi positif (+) rudder akan menyebabkan
sudut yaw negatif, defleksi positif (+) aileron akan
menyebabkan sudut roll negative [5].
b. Desain model linear dibagi dapat dipisahkan menjadi 2
matra, longitudinal dan lateral-direksional. Bentuk linearisasi dapat divariasikan berdasarkan perubahan sudut serang α [3].
c. Kondisi linearisasi divariasikan berdasarkan perubahan
sudut serang α, yaitu pada alpha -8o, -5o, -2o, 0, 2o, 5o, dan
8o.
d. Terdapat error antara model linear dengan non-linear
pada bagian kecepatan translasi U dan w dengan range
error 17m/s untuk U dan 13m/s untuk w.
e. Model linear dapat dikendalikan dan dapat diestimasi.
ACKNOWLEDGMENT
Terimakasih kepada Sekolah Teknik Elektro dan Informatika Institut Teknologi Bandung dalam membimbing menjadi sarjana teknik elektro yang sesungguhnya.
REFERENSI
[1] Alfi Nurhafid, Ammar Novel, Angga Irawan, Rancang Bangun Sistem Autopilot untuk Guided Rocket dan Pengujian Melalui Hardware-in-the-Loop Simulation: Dokumen Engineering B100, B200, B300, B400, B500, Prodi Teknik Elektro ITB, Bandung, 2013.
[2] Blakelock, J.H., Automatic Control of Aircraft and Missile, John Wiley & Sons, Inc., 1965.
[3] Zipfel, P.H., Modeling and Simulation of Aerospace Vehicle Dynamics, the American Institute of Aeronautics and Astronautics, Inc., 2007. [4] Cook, M.V., Flight Dynamics Principles, Arnold, 1997.
[5] Farhan A. Faruqi, Thanh Lan Vu, Mathematical Models for a Missile Autopilot Design, DSTO Systems Sciences Laboratory, 2002.
[6] Y.H. Yogaswara, Rianto A. Sasongko, Taufiq Mulyanto, Pemodelan dan Simulasi Terbang Bom MK-82 LDGP, Fakultas Teknik Mesin dan Dirgantara Institut Teknologi Bandung, Bandung, 2012