PENGATURAN SUHU PENETAS TELUR AYAM MENGGUNAKAN PENGENDALI
FUZZY-INTEGRATOR INTERVENTION
Wakhyu Dwiono1, M. Taufiq Tamam2
1,2
Teknik Elektro, Universitas Muhammadiyah Purwokerto e-mail: [email protected], [email protected]
ABSTRAK
Kendalian penetas telur ayam, adalah secara umum memiliki karakteristik dinamika yang sama dengan kendalian inkubator. Tujuan pengendalian suhu kendalian penetas telur ayam adalah menjaga temperatur dalam penetas tetap pada harga acuan, yaitu berkisar antara 39 hingga 40oC. Tegangan listrik dan panas yang dikonversi adalah memiliki hubungan kuadratis sehingga dalam keadaan ini dapat dikatakan sistem memiliki hubungan tidak linier. Hubungan yang tidak linier antara sumber tegangan dengan aliran panas, akan mudah dikendalikan menggunakan pengendali yang memiliki sifat yang tidak linier juga. Karena pengendali fuzzy memiliki sifat yang sama dengan kendalian penetas telur, maka pengendali ini dipilih untuk mengendalikan sistem. Untuk memperbaiki kinerja pengendalian, dalam penelitian ini pengendali fuzzy digabung dengan pengendali Integrator yang linier. Dari hasil pengujian, diperoleh data bahwa pengendali fuzzy Integrator memiliki kinerja yang lebih baik jika dibandingkan dengan kinerja pengendali penyusunnya (fuzzy ataupun Integrator). Pengendali fuzzy-Integrator yang diwujudkan memiliki kinerja IAE sebesar 62,5 Σgaya =214,5, dengan waktu naik sebesar 7 menit.
Kata kunci: Pengendali Fuzzy, Pengendalian suhu
1. PENDAHULUAN 1.1 Latar Belakang
Secara fisik, penetas telur ayam adalah bekerja seperti halnya inkubator yang berbentuk kotak kecil yang berfungsi sebagai tempat untuk mengerami telur ayam. Karena berfungsi untuk mengerami, maka suhu penetas telur ini dibuat sama dengan suhu induk ayam ketika si induk ayam ini mengerami telurnya.
Penetas telur dengan sumber panas dari energi listrik, memiliki tingkat kesulitan yang lebih tinggi dalam mengendalikan suhunya, jika dibandingkan dengan sumber panas yang lain, misalkan uap, karena dengan menggunakan sumber panas listrik, akan diperoleh hubungan yang tidak linier antara energi panas dengan tegangan masukannya. Disamping itu, tegangan listrik negatif akan memberikan panas yang sama dengan tegangan listrik positif, sehingga dalam mengendalikan suhu, disamping ada pemanas, juga dibutuhkan pendingin. Dengan keadaan seperti ini, maka kendalian (plant) penetas telur ayam termasuk dalam kendalian yang tidak linier.
Pengaturan suhu yang paling banyak digunakan adalah menggunakan thermostat. Prinsip pengaturan suhu dengan cara ini adalah mematikan pemanas ketika suhu di dalam penetas telur melebihi ambang yang diinginkan dan sebaliknya yaitu menghidupkan pemanas ketika suhunya masih dibawah ambang, sehingga disebut juga pengendali hidup-mati (on-off controller). Pengaturan suhu dengan cara seperti ini memiliki kelemahan yaitu tanggapan suhu yang berosilasi dengan fluktuasi yang besar. Tanggapan suhu dengan fluktuasi yang
besar tentunya akan mengganggu proses pengeraman telur ayam.
Untuk memperbaiki kinerja pengendali hidup-mati ini, diperlukan pengendali yang tidak linier yang tetap bekerja meskipun terdapat galat (error) yang kecil. Salah satunya adalah pengendali berlogika fuzzy. Pengendali jenis ini mudah untuk diterapkan karena memiliki sifat-sifat pengendalian yang mendekati pola pikir manusia, yaitu dalam melakukan proses pengambilan keputusan, pengendali jenis ini menggunakan basis kaidah yang diturunkan dari pakar (manusia). Sifat tidak linier pada pengendali fuzzy berasal dari fungsi keanggotaan fuzzy yang bersifat tidak linier, karena dalam penerapannya, selalu dijumpai himpunan yang mengalami kejenuhan (saturation). Sifat tidak linier juga dapat muncul karena basis kaidah yang memang sengaja dibuat tidak linier, tergantung kepada kebutuhan dan kinerja yang diinginkan.
Pengendalian suhu penetas telur adalah sama dengan pengendalian suhu inkubator. Untuk pengendalian inkubator dengan menggunakan pengendali fuzzy, telah dilakukan sebelumnya oleh Hannawati dkk, namun kinerja yang diperoleh masih belum memuaskan, dikarenakan adanya tanggapan suhu yang masih berosilasi. Dalam proposal penelitian ini, penulis mencoba untuk memperbaiki kinerja sistem kendali dengan menggunakan pengendali fuzzy-integrator intervention, serta penggunaan metoda PWM (pulse width modulation) untuk mencatu tegangan pemanas maupun pendinginnya (kipas). Karena berdasarkan hasil penelitian sebelumnya (Dwiono 2005), sistem kendali dengan menggunakan konfigurasi
fuzzy-Fuzzifikasi Defu zzifik asi Basis Kaidah Mekanisme inferensi Input Output 0 50 100 0 0.5 1 Der a ja t K e ang go ta a n (a) 0 50 100 0 0.5 1 Der a ja t K e ang go ta a n (b) 0 50 100 0 0.5 1 Der a ja t K e a ngg ot aan (c) 0 50 100 0 0.5 1 Der a ja t K e a ngg ot aan (d) 0 50 100 0 0.5 1 De ra ja t K ean ggo ta an (e) 0 50 100 0 0.5 1 De ra ja t K ean ggo ta an (f) integrator intervention, dapat memperbaiki kinerja
sistem kendali.
1.2 Perumusan Masalah
Berdasarkan latar belakang di atas, maka dapat dirumuskan hal-hal yang akan dilakukan dalam mewujudkan sistem pengaturan suhu penetas telur ayam menggunakan pengendali fuzzy-integrator intervention, yaitu: rancangan untuk mewujudkan perangkat lunak serta perangkat keras sistem pengaturan suhu penetas telur ayam, pengujian kinerja pengendalian, serta perbandingan kinerja sistem kendali fuzzy-integrator intervention
dengan sistem kendali menggunakan metoda yang lain.
1.3 Tinjauan Pustaka
Pengendali fuzzy adalah sistem logika fuzzy
yang digunakan untuk mengendalikan suatu proses (Passino 1998). Di sini, sistem logika fuzzy memiliki basis kaidah yang dirancang khusus untuk pengendalian sistem. Secara umum, sistem logika
fuzzy terdiri dari empat bagian yaitu: fuzzifikasi, basis kaidah, mekanisme inferensi dan defuzzifikasi. Hubungan antar bagian dalam sistem fuzzy dapat dilihat dalam Gambar 1.
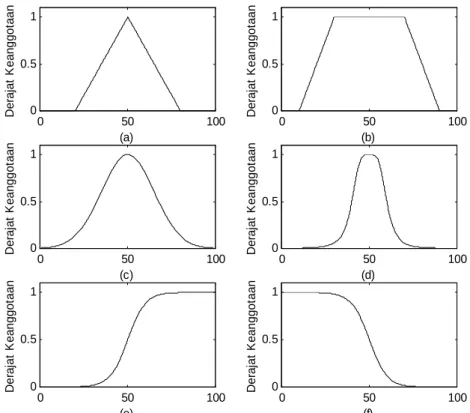
Fuzzifikasi berfungsi untuk merubah masukan (besaran yang bersifat tegas) menjadi himpunan fuzzy yang bersifat tidak tegas (samar). Dalam bagian fuzzifikasi, terdapat fungsi keanggotaan fuzzy yang akan memetakan masukan menjadi himpunan fuzzy. Contoh himpunan fuzzy ini dapat dilihat dalam Gambar 2. Basis kaidah fuzzy
berisi kaidah-kaidah untuk pengambilan keputusan dan dalam prakteknya kaidah-kaidah ini berbentuk
if-then. Mekanisme inferensi merupakan strategi untuk mengambil kesimpulan fuzzy yang berhubungan dengan kaidah fuzzy, berdasarkan masukan yang ada. Kesimpulan-kesimpulan yang diambil dalam mekanisme inferensi akan di terjemahkan menjadi besaran tegas oleh blok defuzzifikasi.
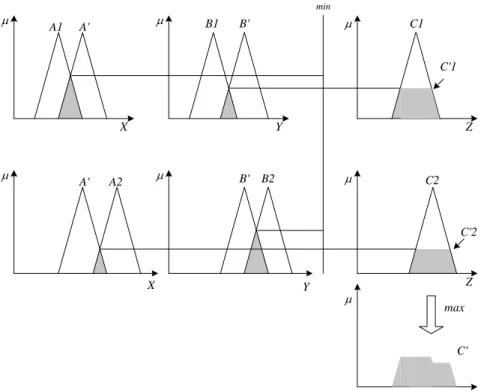
Gambar 1. Diagram blok sistem logika fuzzy. Proses inferensi dan defuzzifikasi dapat dijelaskan sebagai berikut (Jang 1997): dimisalkan kaidah fuzzy yang aktif yaitu:
1. Jika x adalah A1 dan y adalah B1 maka z adalah
C1.
2. Jika x adalah A2 dan y adalah B2 maka z adalah
C2.
Sedangkan kenyataan yang ada adalah: x
adalah A’ dan y adalah B’ maka kesimpulan yang diambil adalah: z adalah C’. Secara grafis, proses ini dapat dilihat dalam Gambar 3.
Gambar 2. Kurva fungsi keanggotaan, (a).segitiga, (b).trapesium, (c).gaussian, (d).bell, (e).sigmoid positif dan (f).sigmoid negatif.
min µ µ X Z C1 C'1 A' A1 µ Y B' B1 µ µ X Z C2 C'2 A' A2 µ Y B' B2 Z µ C' max
Penetas Telur Ayam Sumber Panas Panas Keluar Pengendali fuzzy Pengendali Integrator Σ Masukan Keluaran
Gambar 3. Mekanisme inferensi fuzzy mamdani, untuk kaidah jamak dengan antecedent jamak. 1.3.1 Model Kendalian (Plant)
Kendalian penetas telur adalah berbentuk kotak/ruang kecil, dengan masukan panas yang berasal dari aliran udara yang dilewatkan pada pemanas listrik dan sebagian panas penetas telur teradiasikan ke lingkungan, seperti terlihat pada Gambar 4.
Gambar 4. Model kendalian penetas telur ayam. Dinamika panas yang terjadi dalam penetas telur adalah ) ( 1 1 I o I I T T R C T& = + − (1)
dengan CI = kapasitas panas sumber panas R = Hambatan panas permukaan pemanas
To = Suhu udara
TI = Suhu pemanas Dengan memakai persamaan
) ( 1 2 1 T T R q= − (2) dengan q = aliran panas, joule per detik, maka suhu pemanas adalah berbanding lurus dengan daya listrik yang diberikan ke pemanas. Daya listrik yang diberikan ke pemanas adalah:
R V P
2
= (3)
dengan V adalah tegangan catuan pemanas dan R
adalah hambatan dari pemanas. Dari Persamaan 3, dapat dilihat adanya hubungan tidak linier antara daya dan tegangan catuan pemanas.
1.3.2 Pengendali Fuzzy-Integrator
Pengendali Fuzzy yang digunakan (untuk mengatur suhu inkubator) pada penelitian sebelumnya (Hannawati dkk) adalah pengendali
fuzzy-direct action. Sedangkan dalam penelitian kali ini, pengendali fuzzy yang digunakan adalah pengendali fuzzy-integrator intervention. Diagram blok dari pengendali fuzzy ini dapat dilihat pada Gambar 5.
Gambar 5. Pengendali fuzzy-integrator intervention.
1.4 Tujuan dan Manfaat
Tujuan dari penelitian ini adalah mewujudkan sistem pengaturan suhu penetas telur ayam (secara perangkat keras maupun lunak) dengan fluktuasi suhu yang kecil. sedangkan manfaat yang diharapkan adalah bahwa hasil dari penelitian ini dapat digunakan oleh peternak ayam sebagai alat
Mulai
Uji lup terbuka plant dan mengukur tanggapannya
Merancang bangun hardware dan software pengendali
Fuzzy-Integrator
Uji hardware dan software pengendali fuzzy-Integrator
Hasil bagus?
Aplikasikan pengendali ke sistem
Uji kinerja pengendalian suhu penetas telur dan mengukur
tanggapannya
Hasil bagus?
Variabel pengendali ditala
Selesai Penulisan laporan ya tidak ya tidak µ 1 0.8 0.6 0.4 0.2 EZ EP EN Error 0 5 10 15 20 25 -5 -10 -15 -20 -25 -12 0 12 VP VN VZ 0 5 10 15 20 25 30 30 32 34 36 38 40 42 44 46 48 50
Grafik Dinamika Kendalian Penetas Telur
Waktu (menit) S uhu (c el c ius ) 0 5 10 15 20 25 30 30 32 34 36 38 40 42
Tanggapan Sistem Kendali Suhu Penetas Telur
Waktu (menit) S u h u (c el c ius ) Fuzzy-Integrator Fuzzy Integrator
penetas telur dengan suhu pemanasan yang stabil serta murah.
2. METODE PELAKSANAAN
Tahapan-tahapan yang dilakukan dalam penelitian pengaturan suhu penetas telur ayam menggunakan pengendali Fuzzy-Integrator intervention adalah dapat dilihat pada Gambar 7.
Gambar 6. Fungsi keanggotaan fuzzy.
Gambar 7. Diagram Alir Penelitian 3. HASIL DAN PEMBAHASAN
Dalam pengujian kinerja sistem kendali, acuan (reference) yang digunakan adalah sebesar 40oC (acuan adalah tujuan yang hendak dicapai dalam proses pengendalian plant). Untuk data-data hasil pengujian dapat dilihat di bagian lampiran. 3.1 Peneraan (calibrating) Sensor Temperatur
Untuk menera sensor temperatur, maka sensor digunakan untuk mengukur suhu es yang sedang mencair dan untuk mengukur suhu tubuh. Ketika digunakan untuk mengukur es yang sedang
mencair, tegangan keluaran sensor adalah 0,2 volt, sedangkan ketika digunakan untuk mengukur suhu tubuh, tegangan keluaran adalah 1,5 volt. Jika suhu tubuh adalah 36,5o C, maka kepekaan sensor adalah 0,0356 volt/oC.
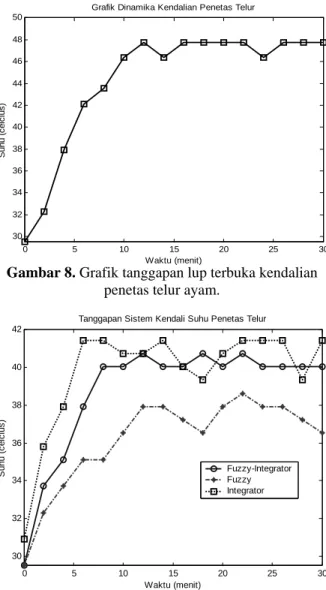
Gambar 8. Grafik tanggapan lup terbuka kendalian penetas telur ayam.
Gambar 9. Grafik tanggapan sistem kendali menggunakan fuzzy, fuzzy-integrator dan integrator. 3.2 Dinamika Kendalian (plant) Inkubator
Inkubator penetas telur ayam ini berukuran (50x40x40) cm. Sedangkan tegangan catuan yang digunakan dalam pengujian ini adalah sebesar 30 volt. Ketika tegangan catuan ini disambungkan ke pemanas, tegangannya turun menjadi 21 volt. Hal ini terjadi karena munculnya pengaruh pembebanan dari pemanas. Resistansi pemanas adalah sebesar 12 ohm, sehingga arus listrik yang mengalir dalam elemen pemanas adalah 1,75 amper.
Pengujian ini dilakukan selama 30 menit dan setiap 2 menit data dicatat. Grafik tanggapan uji lup terbuka ini dapat dilihat pada Gambar 8. Dari Gambar 8 ini dapat dilihat bahwa kendalian inkubator penetas telur ayam memiliki tanggapan sebagai sistem berorde 1, dengan waktu naik 9 detik
0 5 10 15 20 25 30 5
10 15 20
Tegangan Kendali yang Diberikan
Waktu (menit) T e g anga n ( V ol t) Fuzzy-Integrator Fuzzy Integrator 0 5 10 15 20 25 30 30 32 34 36 38 40 42
Tanggapan Sistem Kendali Suhu Penetas Telur
Waktu (menit) S u h u ( c el c ius ) Fuzzy-1 Fuzzy-2 0 5 10 15 20 25 30 30 32 34 36 38 40 42
Tanggapan Sistem Kendali Suhu Penetas Telur
Waktu (menit) S u hu ( c el c ius ) Integrator-1 Integrator-2
serta nilai kondisi tunak sebesar 47,75oC (dengan input tegangan sebesar 30 volt).
Gambar 10. Grafik tegangan kendali yang dilakukan oleh pengendali fuzzy, fuzzy-integrator dan
integrator.
3.3 Tanggapan Sistem Kendali Fuzzy-Integrator Dalam pengujian ini, pengendali fuzzy
menggunakan fungsi keanggotaan seperti pada Gambar 6, sedangkan untuk integrator-nya adalah P dan D = 0, sedangkan I = 2. Pertimbangan yang digunakan dalam memilih penguatan ini adalah grafik tanggapan kendalian yang menyerupai sistem berorde 1, sehingga penguatan differensial-nya adalah 0. Sedangkan penguatan proporsionalnya diwakili oleh kendali fuzzy.
Dari Gambar 9 dapat dilihat bahwa Σ|error| sistem kendali fuzzy-integrator adalah sebesar 26,1; sistem kendali fuzzy adalah sebesar 62,5 sedangkan untuk sistem kendali integrator adalah 28,96. Dari Gambar 10 dapat dilihat bahwa total gaya yang diberikan oleh sistem kendali fuzzy-integrator adalah sebesar 214,5; sistem kendali fuzzy adalah sebesar 114 sedangkan untuk sistem kendali integrator adalah 201,5.
Gambar 11. Grafik tanggapan system kendali menggunakan pengendali fuzzy dengan lebar fungsi
keanggotaan yang berbeda.
Waktu naik untuk sistem kendali fuzzy -integrator adalah 7 menit; sistem kendali fuzzy
adalah tidak mencapai nilai 0,9 dari referensi sedangkan untuk sistem kendali integrator adalah 6 menit.
3.4 Tanggapan Sistem Kendali Fuzzy
Tanggapan sistem kendali dengan pengendali
fuzzy yang berbeda lebar fungsi keanggotaannya dapat dilihat pada Gambar 11. Grafik tanggapan
fuzzy-1 adalah tanggapan sistem dengan pengendali
fuzzy yang menggunakan fungsi keanggotaan seperti pada Gambar 6. Sedangkan grafik tanggapan fuzzy-2 adalah menggunakan fungsi keanggotaan yang lebih sempit, lebarnya adalah separuh dari fuzzy-1.
Dari Gambar 11 dapat dilihat bahwa tanggapan sistem kendali menggunakan pengendali
fuzzy-2 memiliki Σ|error| sebesar 42,39; sedangkan untuk fuzzy-1 adalah sebesar 62,05. Dengan demikian untuk pengendali fuzzy-2 adalah memiliki tanggapan yang lebih baik. Demikian juga untuk waktu naiknya, pengendali fuzzy-2 adalah lebih cepat dibandingkan dengan fuzzy-1. Hal ini terjadi karena dengan menyempitnya fungsi keanggotaan
fuzzy maka dengan input error yang sama derajat keanggotaannya akan lebih tinggi, sehingga keluaran
fuzzy-nya akan semakin besar (semakin menyempit akan sama artinya dengan penguatan yang diperbesar), hal ini dapat dilihat dari Σgaya yang dikeluarkan oleh fuzzy-2 sebesar 24,48 yang lebih besar dari Σgaya yang dikeluarkan oleh fuzzy-1 sebesar 23,78.
3.5 Tanggapan Sistem Kendali Integrator
Gambar 12. Grafik tanggapan system kendali menggunakan pengendali integrator dengan
penguatan yang berbeda.
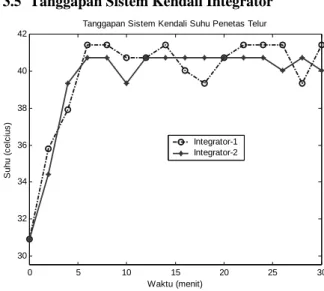
Tanggapan sistem kendali suhu penetas telur menggunakan pengendali integrator dengan penguatan yang berbeda dapat dilihat pada Gambar 12. Integrator-1 memiliki penguatan sebesar 2, sedangkan integrator-2 memiliki penguatan sebesar
4. Dari data pengukuran (lihat lampiran) diperoleh data Σ|error| untuk integrator-1 adalah sebesar 28,96 untuk integrator-2 adalah sebesar 23,4. Sedangkan
Σgaya yang dikeluarkan integrator-1 adalah sebesar 201,5 untuk integrator-2 adalah sebesar 176,5. Dari data-data tersebut dapat disimpulkan bahwa integrator-2 memberikan kinerja yang lebih baik jika dibandingkan dengan integrator-1.
4. KESIMPULAN DAN SARAN 4.1 Kesimpulan
Dari data hasil pengujian kinerja sistem kendali suhu penetas telur ayam menggunakan pengendali fuzzy-integrator intervention dapat diambil beberapa kesimpulan yaitu:
1. Pengendali fuzzy-intyegrator menunjukan kinerja yang lebih baik jika dibandingkan dengan pengendali fuzzy atau pengendali integrator.
2. Kinerja pengendali fuzzy-integrator memiliki
Σ|error| = 62,5 dan Σgaya =214,5, dengan waktu naik sebesar 7 menit.
3. Lebar fungsi keanggotaan yang dipersempit akan memperbesar penguatan keluaran pengendali fuzzy.
4. Penguatan integrator yang diperbesar, maka akan mempersingkat waktu naik dan memperbaiki kinerja sistem.
4.2 Saran-saran
Untuk penelitian lebih lanjut dalam topik aplikasi logika fuzzy dalam embedded system
sebagai pengendali suhu, dapat dilakukan beberapa hal berikut ini:
1. Proses pembacaan data akan lebih baik jika dilakukan secara otomatis menggunakan PC. 2. Waktu pencuplikan data harus sesuai dengan
kriteria Shanon, sehingga tidak terjadi informasi yang keliru.
3. Regulasi tegangan catu daya harus bagus, supaya terjamin tegangan catuannya, terutama untuk proses konversi data oleh ADC.
4. Tegangan catu untuk pemanas sebaiknya terpisah dari catu daya rangkaian kendali.
PUSTAKA
[1] Dwiono, Wakhyu., (2005), Perancangan dan Penerapan Pengendali Fuzzy Bertipe 2 Interval, Tesis Program Magister, Institut Teknologi Bandung
[2] Franklin, Gene.F., Powell, J.David., Emami-Naeni, Abbas., (1994), Feedback control Of Dynamic Systems, Addison-Wesley, New Jersey, 24–28.
[3] Hannawati, Anies., Thiang, Resmana, Prototipe Sistem Kendali Temperatur Berbasis Fuzzy Logic Pada Sebuah Inkubator,
WWW.Petra.ac.id.
[4] Jang, J.S.R., Sun, C.T., Mizutani,E., (1997),
Neuro-Fuzzy and Soft Computing, Prentice-Hall International, New Jersey, 1– 9.
[5] Jantzen, Jan, (1998), Tuning Of Fuzzy PID Controllers, Tech. Report Technical University of Denmark, 98-H 871 (fPID), 1–21.
[6] Mann, George.K.I, Hu, Bao-Gang., Gosine, Raymond.G., (1999), Analysis of Direct Action Fuzzy PID Controller Structures, IEEE Transactions On Systems, Man, And Cybernetics, 29, 371–387.
[7] Nalwan, Paulus Andi., (2003), Teknik Antarmuka dan Pemrograman Mikrokontroler AT89C51, PT. Elex Media Komputindo, Jakarta.
[8] Passino, K.M., Yurkovich, S., (1998), Fuzzy Control, Addison-Wesley, Menlo Park, 301– 315.
[9] Phillips, Charles.L., Nagle, H.Troy., (1990),
Digital Control System Analysis and Design, Prentice-Hall International, Inc, New Jersey, 400–406.