1
Perbandingan Kontrol Manuver dan Pendaratan Quadrotor
dengan PID,
Gain Scheduling,
dan PID Sinyal Kontrol
Termodifikasi
Immanuel N. Ricardo, Katjuk Astrowulan, Eka Iskandar
Jurusan Teknik Elektro, Fakultas Teknologi Industri, Insitut Teknologi Sepuluh Nopember, Surabaya 60111
e-mail: [email protected], [email protected], [email protected]
Abstrak – Quadrotor diharapkan dapat bergerak dengan lincah dan akurat. Secara fisis, pergerakan maju atau menyamping dari quadrotor membutuhkan sudut dan gaya angkat sebagai gaya dorong horizontal. Secara sederhana, perubahan posisi sudut roll dan pitch quadrotor akan menyebabkan gaya linier yang bekerja terbagi menjadi gaya angkat (vertikal) dan gaya translasi. Dampak perubahan sudut terhadap perubahan gaya angkat akan
menyebabkan perubahan akselerasi ketinggian.
Secara fisik, dapat terlihat pada penurunan ketinggian yang terjadi saat melakukan manuver dari quadrotor. Gerak manuver quadrotor dikendalikan dengan kontroler PID. Namun pada kontrol ketinggian quadrotor akan dianalisa dengan tiga metode yang berbeda yaitu PID, PID gain scheduling, dan modifikasi sinyal kontrol pada PID. Didapatkan dengan memodifikasi sinyal kontrol PID diperoleh performansi quadrotor penurunan ketinggian 0%, waktu konstan manuver maju 2.376 sekon dan waktu konstan pendaratan 2.169 sekon.
Kata kunci: Quadrotor, Manuver, Gain Scheduling.
1. PENDAHULUAN
Pesawat rotorcraft yang paling konvensional adalah helikopter. Untuk bergerak maju atau menyamping maka propeler helikopter harus memiliki kemiringan momen putar dengan sudut tertentu. Posisi propeler yang tidak bersifat kaku/konstan tersebut, menyebabkan helikopter sulit untuk dikendalikan.
Dengan membuat rotor pada pesawat rotorcraft
menjadi empat buah, diharapkan dapat menggantikan kondisi yang memaksa untuk mengendalikan posisi sudut propeler. Pengaturan perubahan sudut posisi propeler yang digunakan oleh helikopter untuk bergerak maju atau menyamping dapat digantikan dengan hanya mengatur kecepatan dari keempat rotor pada propeler. Pesawat rotorcraft dengan empat buah propeler ini disebut juga quadro-helicopter, quadcopter, atau quadrotor.
Perkembangan rotorcraft bermula pada abad awal ke 20, ketika Charles Richet, seorang peneliti dan akademisi membuat sebuah helikopter kecil tanpa awak [1]. Perkembangan quadrotor sebagai robot terbang dimulai oleh Bouabdallah dan berhasil membuat quadrotor yang dinamakan OS4.
Gerak translasi pada quadrotor di tentukan oleh gaya angkat dan sudut-sudut pada quadrotor.
Perubahan sudut pada quadrotor akan mengurangi gaya angkat dari quadrotor, karena akan terbagi menjadi gaya translasi. Dapat diasumsikan bahwa secara matematis terjadi perubahan parameter pada plant. Terdapat beberapa metode untuk keadaan tersebut, antara lain dengan mengubah parameter kontroler yang digunakan karena perubahan parameter plant, seperti teknik gain scheduling. Selain melakukan perubahan pada parameter kontroler, dapat dilakukan manipulasi sinyal kontrol dengan menambahkan variabel sinyal kontrol nominal yang bergantung dengan variabel sudut.
Pemodelan secara matamatis dan konsep dasar dari quadrotor akan dijelaskan pada Bagian 2. Perancangan kontroler akan didiskusikan pada Bagian 3. Dari model matematis dan kontroler yang telah dirancang, maka dapat dilakukan simulasi dan pembahasan yang akan dijelaskan pada Bagian 4. Kesimpulan dan saran untuk penelitian berikutnya disampaikan pada Bagian 5.
2. PERMASALAHAN DAN PEMODELAN
Quadrotor yang digunakan sebagai robot
terbang kecil memiliki model mekanik yang terdiri dari empat rotor yang dipasang pada sumbu silang simetris. Bentuk ini diharapkan tipis dan kaku, sehingga didapatkan friksi udara yang kecil.
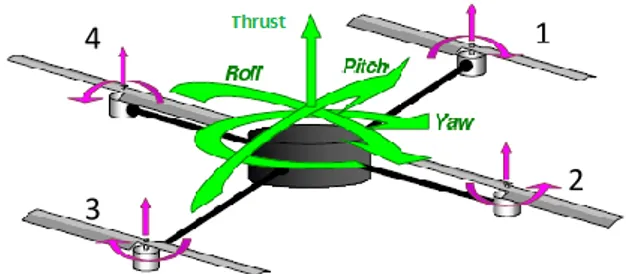
Gambar 1. Kerangka Quadrotor
Dari Gambar 1 dapat di lihat bahwa dua pasang baling-baling (1,4) dan (2,3) berputar dengan arah yang saling berlawanan. Dengan memvariasikan kecepatan rotor dapat mengubah gaya angkat dan menciptakan gerak. Dengan demikian, meningkatkan atau menurunkan kecepatan keempat baling-baling bersama-sama menghasilkan gerakan vertikal. Mengubah kecepatan baling-baling 2 (kiri) dan 3 (kanan) akan menghasilkan gerakan rotasi roll ditambah dengan gerakan translasi terhadap sumbu y sedangkan
3
2
1
4
2
mengubah kecepatan baling-baling 1 (depan) dan 4 (belakang) akan menghasilkan gerakan rotasi pitch
ditambah dengan gerakan translasi terhadap sumbu x.
2.1. Kinematika dan Dinamika Quadrotor [1][2]
Quadrotor memiliki 6 defree of freedom (DOF). Pendeskripsian gerakan dari 6 DOF rigid-body
digunakan dua buah frame referensi yaitu earth inertial reference (E-frame atau bingkai E) dan body fixed reference (B-frame atau bingkai B).
Gambar 2. Ilustrasi Bingkai E dan Bingkai B
E-frame (oE, xE, yE, zE) adalah sumbu referensi
frame bumi. Didefinisikan titik xE merupakan titik
yang menuju arah Utara, titik yE menuju ke arah
Barat, titik zE menuju ke arah atas dengan
memperhatikan bumi, dan oE adalah sumbu origin.
Frame ini digunakan untuk menentukan posisi linear
𝜞E [m] dan posisi sudut ΘE [rad] quadrotor.
B-frame (oB, xB, yB, zB) melekat pada bodi
quadrotor. Frame atau bingkai ini dibutuhkan untuk menentukan posisi quadrotor yang tidak hanya posisi liniernya saja, namun juga posisi sudutnya. Titik xB
didefinisikan menuju ke arah depan, titik yB menuju
ke arah kiri, titik zB menuju ke atas, dan oB merupakan
sumbu origin. oB dipilih tepat pada titik tengah
quadrotor. Kecepatan linear VB, [m/s], kecepatan
sudut ωB [rad/s], gaya FB, [N], dan torsi τB [Nm]
telah ditentukan pada frame ini.
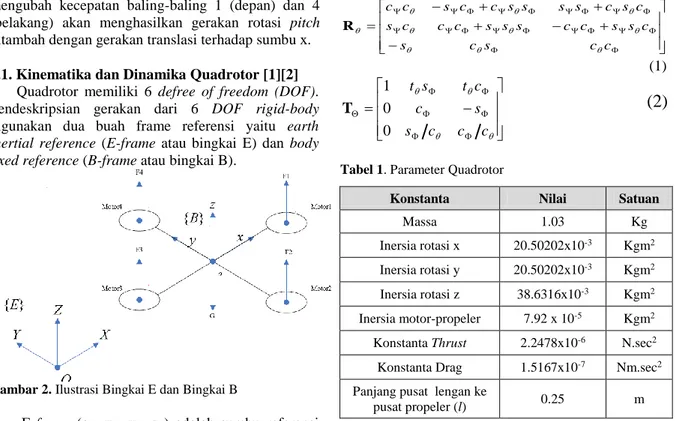
Posisi sudut bodi dapat diketahui dengan menganalisa terhadap bingkai bumi. Hal ini menuntut transformasi matematis dari bingkai bodi menuju bingkai bumi seperti pada matriks persamaan (1) untuk transformasi gerak linier dan persamaan (2) untuk transformasi gerak melingkar. Huruf c, s dan t menunjukkan fungsi trigonometri cosinus, sinus dan tangen.
Persamaan dinamik sistem mencakup sistem
hybrid yang disusun oleh persamaan linear dari
E-frame dan persamaan angular dari B-frame. Hal ini dilakukan untuk menyesuaikan komponen-komponen sistem real yang mungkin diaplikasikan. Dinamika sistem pada H-frame dapat dituliskan dalam bentuk persamaan (3). c c s c s c s s c c s s s c c c s c s c s s s s c c s c c R (1) c c c s s c c t s t 0 0 1 T
(2)
Tabel 1. Parameter Quadrotor
Konstanta Nilai Satuan
Massa 1.03 Kg
Inersia rotasi x 20.50202x10-3 Kgm2
Inersia rotasi y 20.50202x10-3 Kgm2
Inersia rotasi z 38.6316x10-3 Kgm2
Inersia motor-propeler 7.92 x 10-5 Kgm2
Konstanta Thrust 2.2478x10-6 N.sec2
Konstanta Drag 1.5167x10-7 Nm.sec2
Panjang pusat lengan ke
pusat propeler (l) 0.25 m 2
)
(
)
(
)
(
ζ
ζ
G
O
ζ
Ω
E
ζ
Ω
C
ζ
M
H
H
H
H
H (3)Persamaan inersia sistem terhadap H-frame
sama dengan bentuk persamaan inersia sistem terhadap B-frame, dan ditentukan dalam bentuk matriks seperti pada persamaan (4).
zz yy xx B I I I m m m 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 M MH (4)
Matriks sentripetal Coriolis terhadap H-frame )
(ζ
CH tidak sama dengan matriks sentripetal Coriolis terhadap B-frame dan ditentukan seperti pada persamaan (5). ) ( ) ( 3 3 3 3 3 3 B ω I S 0 0 0 ζ CH (5)
Vektor gravitasi terhadap H-frameGH dituliskan pada persamaan (6). Dapat dilihat bahwa gravitasi mempengaruhi ketiga persamaan linear, namun lebih berpengaruh terhadap ketinggian quadrotor.
0 0 0 0 0 mg 1 3 GE H 0 F G (6)
3
Efek giroskopis yang dihasilkan oleh putaran propeler tidak berubah karena hanya mempengaruhi persamaan angular yang mengacu kepada B-frame. Maka matriks giroskopis terhadap H-frame
O
H
dibuat sama dengan persamaan (7).
O
v
O
H
B (7)Matriks gaya H-frame EH
ζ berbeda dengan matriks gaya terhadap B-frame karena jika diamati bahwa gaya linier input diinginkan terhadap referensi bumi maka gaya angkat yang dihasilkan propeler per-lu ditransformasi .Gaya input pada quadrotor diten-tukan pada persamaan (8).
2 2 B H E I 0 0 R ζ E 3 3 3 3 3 3 (8)Dari persamaan (3), maka dapat ditentukan nilai
ζ dengan melakukan proses matematika seperti pada persamaan ( 9). ) ) ( ) ( ) ( ( 2 1 Ω ζ E Ω ζ O G ζ ζ C M ζ H H H H H (9) Persamaan (10) menunjukkan uraian persamaan (9) bukan dalam bentuk matriks, melainkan dalam bentuk persamaan sistem.
zz zz yy xx yy yy r yy xx zz xx xx r xx zz yy I U pq I I I r I U p I I pr I I I q I U q I I qr I I I p m U g Z m U Y m U X 4 3 2 1 1 1 cos cos sin cos cos sin sin sin sin cos sin cos (10)
Dan masukan kecepatan propeler diberikan oleh persamaan (11).
4 3 2 1 2 4 2 3 2 2 2 1 4 2 3 2 1 3 2 4 2 2 2 2 4 2 3 2 2 2 1 1 d U lb U lb U b U (11)Dengan mengasumsikan sudut pada quadrotor adalah 00 maka dapat disimpulkan bahwa Persamaan
(10) merupakan fungsi double integrator. Hal ini me-nyebabkan jika sistem mendapat masukan gaya yang konstan (unit step), maka respon akan tidak stabil.
Perubahan sudut roll dan pitch menyebabkan adanya pengurangan gaya angkat akibat terbagi dengan gaya translasi. Jika pada saat manuver quad-rotor mengalami kekurangan gaya angkat dapat berdampak penurunan ketinggian atau bahkan quad-rotor akan jatuh.
Dibuktikan pada Persamaan (10), bahwa peru-bahan sudut roll dan pitch dapat merubah model ma-tematik gerak vertikal plant.
3. PERANCANGAN KONTROLER
Kontroler akan dibutuhkan untuk mengendalikan ketinggian, perpindahan maju (X), perpindahan menyamping (Y), sudut roll, pitch, dan yaw. Metode yang digunakan adalah kontroler PID, sedangkan untuk ketinggian dilakukan analisis dengan tiga metode yang berbeda yaitu PID, Gain Scheduling, dan modifikasi sinyal kontrol, dimana kedua metode yang lain tetap berbasis PID.
3.1. Kontroler PID [3]
PID controller merupakan algoritma metode kendali yang terdiri dari tiga konsep matematika yaitu proporsional, integral, dan derivative. PID merupakan algoritma kontrol yang paling sering digunakan dan kadang menjadi algoritma “percobaan awal”. PID adalah kontroler yang berbasis negative feedback control. Kontroler PID diungkapkan pada Persamaan (12). ) ) ( ) ( ) ( ( ) ( 0
t d i p dt t de K dt t e K t e K t u (12)Analisis root locus terhadap fungsi double inte-grator, diperoleh bahwa plant bisa berada pada daerah stabil jika menggunakan kontroler PD atau PID [4].
Dengan mengkategorikan persamaan percepatan X, Y dan Z adalah persamaan translasi serta persa-maan Ø, Ө, dan ψ adalah rotasi, maka dapat dilihat bahwa untuk mengendalikan ketinggian dari quad-rotor, didapatkan parameter yang akan dikendalikan adalah gaya thrust pada persamaan translasi. Sinyal kontrol yang diberikan merupakan penjumlahan sinyal kontrol dari kontroler dan bias sebesar massa dikali gravitasi atau gaya gravitasi. Perancangan diagram blok sistem ditampilkan pada Gambar 3.
Kontroler Translasi
-+
Set Z Z
mg
Gambar 3. Diagram Blok Ketinggian
Pengendalian sudut roll, pitch dan yaw dapat dilakukan dengan mengendalikan torsi U2, U3, U4.
Dari diagram blok yang disajikan pada Gambar 4, sudut adalah roll, pitch, yaw dan berturut-turut n=2,3,4.
Kontroler Rotasi
-+
Set Sudut Sudut
Un
4
Dari persamaan X dan Y, gerak translasional pada sumbu X dan sumbu Y quadrotor dipengaruhi oleh gaya thrust dan dapat dikendalikan dengan mengatur sudut pitch dan -roll dari quadrotor seperti pada Gambar 5 dan 6. Kontroler X Rotasi
-+
Set X pitch Translasi+
-X KontrolerGambar 5. Diagram Blok Cascade X
Hasil tunning kontroler PID dengan ekspetasi output mendekati orde satu didapatkan parameter seperti pada Tabel 2. Kontroler Y Rotasi
-+
Set Y Roll Translasi -Y KontrolerGambar 5. Diagram Blok Cascade Y
Tabel 2. Parameter Kontroler
X Y Z Roll Pitch Yaw
Kp 0.12 0.12 2 1.3 1.3 2
Ki 0 0 0 0 0 0
Kd 2 2 2 0.12 0.12 0.2
RMSE 0.0358 0.0358 0.0261 0.0094 0.0094 0.0094
3.2. Kontroler Gain Scheduling [5]
Pada model matematis Persamaan 3, diperoleh bahwa gerak vertikal bergantung terhadap sudut quadrotor. Dengan kata lain, sudut quadrotor akan merubah model matematik plant karena menjadi parameter pada saat pengaturan ketinggian. PID tidak mampu beradaptasi terhadap parameter plant yang berubah atau model matematik plant yang berubah.
Kontroler PID memiliki parameter kontroler tertentu untuk model matematik yang terbatas atau tetap. Dari teori ini, diasumsikan perubahan model matematik mengharuskan untuk merubah parameter kontroler. Metode yang diterapkan adalah gain scheduling.
Gain scheduling akan memberikan nilai
parameter kontroler yang bergantung terhadap variabel lain secara matematis atau algoritmik seperti pada contoh Persamaan (13). Desain sistem kontrol ketinggian disajikan dengan blok diagram yang pada Gambar 6. ) ) ( )) ( ( ) ( )) ( ( ) ( ))( ( ( ) ( 0
p i t d dt t de t z K dt t e t z K t e t z K t u (13) Kontroler-+
Set Z Translasi Z mg Gain Schedule Kp Ki Kd Roll PitchGambar 6. Diagram Blok Gain Scheduling Ketinggian
Bila variabel f adalah nilai yang menyebabkan adanya perubahan model matematis pada quadrotor, maka Persamaan (14) menunjukan nilai f berdasarkan sudut roll dan pitch.
cos s co f (14)Parameter kontroler diestimasi dengan menggunakan metode interpolasi linier. Didapatkan persamaan gain scheduling seperti yang disajikan pada Persamaan (15), (16), (17), (18), (19), (20). Saat 0.85≤f≤1, ) 1 ( 15 . 0 8 2 f Kp (15) ) 1 ( 15 . 0 1 . 0 f Ki (16) ) 1 ( 15 . 0 7 2 f Kd (17) Saat 0.70≤f≤0.85, ) 85 . 0 ( 15 . 0 8 10 f Kp (18) ) 85 . 0 ( 15 . 0 17 . 0 1 . 0 f Ki (19) ) 85 . 0 ( 15 . 0 15 9 f Kd (20)
3.3. Kontroler PID Sinyal Kontrol Termodifikasi
Kontrol ketinggian dengan menggunakan PID
gain scheduling memiliki kelemahan, yaitu
membutuhkan lebih banyak tunning. Maka, diharapkan dengan parameter kontroler yang tetap bisa diperoleh performa respon yang sama.
Ketinggian pada quadrotor dipengaruhi oleh gaya berat dan gaya angkat dari quadrotor. Dengan teori ini, dapat dilakukan rekayasa bahwa penurunan ketinggian yang mungkin terjadi karena kekurangan gaya angkat dapat diatasi dengan menambah variabel bias terhadap sinyal kontrol ketinggian bergantung dengan variabel tertentu.
Gaya angkat akan terbagi dengan gaya translasi saat posisi sudut roll dan pitch quadrotor tidak berada
5
pada 00. Dapat diasumsikan bahwa, variabel biasa
hanya bergantung dari sudut roll dan pitch.
Blok diagram PID sinyal kontrol termodifikasi dari kontroler PID dengan bias variabel didapatkan seperti pada Gambar 7.
Kontroler -+ Set Z Translasi Z Bias Roll Pitch ∆U1 U’1 U1
Gambar 7. Diagram Blok Sinyal Kontrol Termodifikasi
Dari diagram blok, gaya input U1 yang diberikan
ke quadrotor dihasilkan dari Persamaan (21).
Penurunan persamaan bias adalah demikian, pertama diharapkan nilai resultan gaya yang bekerja saat hover sama dengan 0 disajikan pada Persamaan (22), maka akan dijabarkan seperti Persamaan (23). Dengan mengasumsikan ∆U1=0, maka akan
didapatkan persamaan bias seperti pada Persamaan (24). ' 1 1 1 U U U (21)
F 0 (22) mg U1cos
cos
(23)
cos s co ' 1 mg U (24)4. SIMULASI DAN PEMBAHASAN
Dilakukan simulasi metode kontrol terhadap model matematik dari quadrotor, sehingga dapat dilakukan analisa sebelum melakukan implementasi metode secara langsung. Dari simulasi akan diperoleh metode yang paling efektif untuk mempertahankan ketinggian selama manuver, dari ketiga metode yang diuji.
Algoritma gerak quadrotor yang disimulasikan adalah sebagai berikut:
1. Quadrotor melakukan hovering di titik 3 m selama 8 detik sebelum manuver dengan koordinat awal (0, 0.2 ,2.8) dan posisi awal sudut yaw 0.2 radian.
2. Quadrotor melakukan manuver linier maju hingga pada posisi X=12 m atau detik ke 15. 3. Quadrotor melakukan pendaratan di detik ke
15.
4.1. PID
Dengan menggunakan parameter kontroler pada Tabel 2, didapatkan respon posisi linier X, Y, Z, seperti pada Gambar 8, respon sudut pada Gambar 9.
(a)
(b)
(c)
Gambar 8. (a) Respon Manuver Maju, (b) Respon Gerak Menyamping, (c) Respon Ketinggian
Gambar 9. Respon Sudut
Pada manuver maju, terlihat dengan mekanisme kontroler PID konvensional dengan nilai parameter konstan tidak dapat mempertahankan ketinggian yang ditetapkan atau mengalami drop ketinggian.
Spesifikasi performansi yang dihasilkan dari respon dengan kontroler PID didekati dengan kriteria orde 1, yaitu saat manuver maju memiliki time konstan 2,376 sekon, dan saat mendarat memiliki time konstan 2,169 sekon. Namun saat manuver terdapat drop ketinggian 9,2417%.
4.2. Gain Scheduling
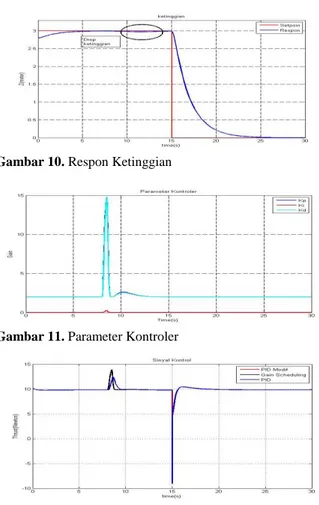
Metode gain scheduling digunakan untuk mengoreksi penurunan ketinggian yang tidak dapat dilakukan oleh kontroler PID. Didapatkan respon seperti pada Gambar 10, dengan perubahan parameter yang terlihat pada Gambar 11.
6
Gambar 10. Respon KetinggianGambar 11. Parameter Kontroler
Gambar 12. Sinyal Kontrol Ketinggian
Dari Gambar 12, dapat dilihat bahwa sinyal kontrol atau gaya angkat dari kontroler gain scheduling merespon lebih cepat dan lebih besar dari sinyal kontrol PID.
Dari hasil simulasi dengan gain scheduling
metoda interpolasi linier didapatkan spesifikasi performansi sama dengan PID namun drop ketinggian menjadi lebih kecil atau bernilai 0.82%.
4.2. PID Sinyal Kontrol Termodifikasi
Metode terakhir yang digunakan adalah metode modifikasi sinyal kontrol pada PID. Metode ini mengadaptasi sifat gaya angkat yang merespon lebih cepat, dan dengan besar yang sesuai unuk mempertahankan ketinggian. Hasil yang didapatkan ditampilkan pada Gambar 13.
Dari hasil simulasi ketiga metode kontrol tersebut, dapat diambil kesimpulan bahwa metoda terbaik untuk gerak manuver dan pendaratan adalah metode PID dengan nilai bias atau nominal yang variabel. Secara keseluruhan, spesifikasi performansi dalam simulasi adalah sama dengan kontroler metode PID namun drop ketinggian menjadi 0%.
5. KESIMPULAN
Spesifikasi performansi yang dihasilkan dari respon dengan kontroler yang telah diuji didekati dengan kriteria orde 1, yaitu saat manuver maju memiliki time konstan 2,376 sekon, dan saat mendarat memiliki time konstan 2,169 sekon. Namun saat manuver terdapat penurunan ketinggian 9,2417% untuk PID, 0.82% pada Gain Scheduling, dan 0% dengan modifikasi sinyal kontrol pada PID.
Namun penelitian ini masih membutuhkan banyak perbaikan, karena hasil yang didapatkan masih dalam batas simulasi dan dilakukan pembatasan-pembatasan yang mungkin akan tetap terjadi pada saat implementasi.
DAFTAR PUSTAKA
[1] Tommaso Bresciani, “Modelling, Identification and Control of a Quadrotor Helicopter”. Department of Automatic Control Lund University, Thesis, 2008.
[2] Spong, Mark W., Vidyasagar, M., “Robot Dynamics and Control”, John Wiley and Sons,
1989.
[3] Immanuel Natanael Ricardo, “Kontrol Manuver dan Pendaratan Quadrotor dengan PID Gain Scheduling dan Sinyal Kontrol Termodifikasi”,
Tugas Akhir, Institut Teknologi Sepuluh
Nopember, Surabaya, 2013.
[4] Astrom, K., Hagglund, T. , "PID Controllers: Theory, Design, and Tunning", Instrument Society of America, 1995.
[5] Rugh, Wilson J., Shamma, Jeff S. , "Research on Gain Scheduling", Automatica 36 1401-1425, 2000.