ISSN No. 2085 - 0859
Karakteristik Filter Aktif dengan Pendekatan Algoritma Genetika
Zainal Abidin *)
*) Dosen Teknik Elektro Fakultas Teknik Universitas Islam Lamongan
Abstrak
Makalah ini menyajikan desain filter daya aktif yang dikontrol menggunakan teknik histerisis. Algoritma genetika digunakan untuk mendesain kontroler untuk mengurangi prosentase THD dari sumber arus. Hasilnya dibandingkan dengan hasil desain pendekatan Ingram dan Round. Hasil simulasi menunjukkan pendekatan algoritma genetika menghasilkan prosentase minimum THD dari arus sumber dibandingkan dengan metode Ingram dan Round. Prosentase THD juga mengikuti standar IEEE st. 519-1992. Desain dari filter daya aktif didasarkan pada algoritma genetika lebih fleksibel dan dapat meningkatkan kinerja filter. Studi simulasi dilakukan dengan Matlab/Simulink.
Kata kunci : - algoritma genetik, kontrol histerisis, eliminasi harmonik, filter daya aktif.
I. Pendahuluan
Sebuah sistem daya terhubung dengan beban non linier dapat menghasilkan arus harmonik. Nilai Harmonik tersebut menyebabkan banyak kerugian seperti rugi saluran transmisi dan peralatan listrik, kegagalan peralatan proteksi dan hubung singkat peralatan elektronik [1]. Untuk itu sangatlah penting usaha untuk mereduksi atau mengurangi harmonik sistem. Langkah mereduksi harmonic yang terbaik menggunakan filter daya aktif (active power filter (APF) [2] sebagaimana ditunjukkan pada gambar 1 di atas. Rangkaian tersebut menyediakan efisiensi yang tinggi dan lebih fleksibel dibandingkan menggunakan filter daya pasif. Pada rangkaian tersebut, rangkaian penyearah jembatan 3 fase dengan menggandeng resistor R =3.37 k dan Induktansi L =19.8 H yang bertindak sebagai beban non linier yang terhubung sistem. Ini merupakan teori spontanitas daya reaktif (PQ method) [3] yang digunakan mendeteksi harmonik untuk menghitung arus referensi untuk filter daya aktif. Selanjutnya filter daya aktif dikendalikan dengan metode histerisis [4].
Ada beberapa pendekatan untuk mendesain filter daya aktif menggunakan teknik artificial intellegence (AI) seperti Adaptive Tabu Search (ATS) [5], particle swarm optimization (PSO) [6], and algoritma genetika (AG) [7]. Dalam makalah ini,
Algoritma Genetika digunakan untuk mencari parameter filter daya aktif (APG) untuk meminimalkan prosentase THD dari Arus sumber (Is) setelah kompensasi.
Sesuai dengan gambar 1, parameter filter daya aktif untuk pencarian algoritma genetika adalah tegangan DC bus (Vdc), induktansi filter
(Lf), dan pita histerisis (Hb). Hasil desain APF menggunakan Algoritma genetika dalam makalah ini dibandingkan dengan pendekatan teknik Ingram dan Round [8].
Paper ini terdiri dari : ikhtisar dari kompensasi kontrol arus menggunakan metode histerisis pada bab 2. Sementara desain APF menggunakan metode Ingram dan Round dan Algoritma Genetika dibahas pada bab 3 dan bab 4. Hasil simulasi dari eliminasi harmonik dan analisis disajikan pada bab 5. Sementara analisis kesimpulan dari keuntungan pendekatan Algoritma Genetika untuk desain filter daya aktif dijelaskan pada bab selanjutnya.
ISSN No. 2085 - 0859
2. Kontrol kompensasi arus menggunakan Metode Histerisis
Gambar 2.
Kompensasi kontrol arus menggunakan metode histerisis
Proses kompensasi kontrol arus menggunakan pendekatan histerisis seperti ditunjukkan pada gambar 2. Seperti gambar di atas, pita histerisis adalah batas kemungkinan kompensasi arus (ic).Ayunan arus ini antara
batas atas dan batas bawah pendekatan histerisis.
Arus kompensasi dapat ditingkatkan atau dikecilkan tergantung pola switching IGBT pada filter daya aktif. Sebagai contoh, ketika IGBT dinyalakan, ic akan ditingkatkan. ic
kembali ditingkatkan hingga mencapai batas histerisis atas. Pada kondisi ini, IGBT secara otomatis dimatikan untuk menurunkan arus kompensasi. Jika arus turun ke bawah menuju ke batas paling rendah, IGBT secara otomatis menyala lagi untuk meningkatkan arus kompensasi.
Kemudian, kompensasi arus tersebut melintas ke mengikuti pita histerisis (Hb)
mengikuti arus referensi ic
.
Arus referensidapat
diidentifikasi dengan PQ harmonik seperti gambar 1. Untuk batas histerisis atas dan bawah dikontrol dengan pita histerisis.
3. Desain Filter Daya Aktif dengan Metode Ingram dan Round
Pada tahun 1997, D.M.E.Ingram dan S.D. Round memaparkan metode pengaturan desain filter daya aktif dengan metode histerisis. Adapun langkah-langkah metode dapat dijelaskan sebagai berikut :
Step 1: Menghitung nilai maksimum dari
di*c /dt by: ih(max) (t) = A sin (2ft) (1) max
A
f
dt
di
c
2
)
*
(
(2) Dimana :ih (max) (t) adalah arus maksimum untuk tiap
komponen harmonik. A adalah amplitudo arus harmonik
f adalah frekuensi arus harmonik
Step 2: Menghitung Lf dengan rumus :
Dimana Vs adalah sumber tegangan
maksimum.
Catatan : nilai maksimum dari
di
*c/ dt
adalah
step 1 dan
V
dcharus didesain lebih dari
V
sStep 3: Menghitung HB dengan :
Dimana fsw adalah frekuensi switching.
ISSN No. 2085 - 0859
4. Filter Daya Aktif dengan Pendekatan
Algoritma Genetika
4.1. Gambaran Algoritma Genetika
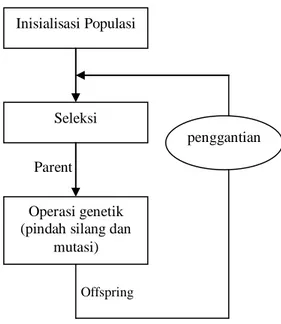
Gambar 3. Proses Algoritma Genetika Pada gambar 3, ada tiga proses utama dalam algoritma genetika. Langkah pertama adalah „selection‟. Proses ini akan menyeleksi
populasi dengan sistem pencarian hingga orang tua funtuk generasi berikutnya. Proses kedua adalah “genetic operation” untuk
mencari solusi terbaik pindah silang dan teknik mutasi. Hasil akhir proses adalah “replacement”. Offspring dari proses operasi
genetik akan mengganti populasi sebelumnya dimana penggantian tersebut dengan bagian yang sama dari populasi tergantung pada kondisi algoritma.
4.2 Desain Filter Daya Aktif dengan AG
Filter daya aktif dikontrol menggunakan metode histerisis. Dalam makalah ini, AG diaplikasikan untuk menghitung nilai parameter filter daya aktif yang tepat. Parameter yang dicari antara lain tegangan DC bus (Vdc), filter induktor (Lf) dan pita histerisis
(HB).
Blok diagram di atas menjelaskan bagaimana mencari parameter-parameter filter aktif dengan menggunakan algoritma genetik dapat digambarkan pada gambar 4. Pada gambar, algoritma mencari parameter filter aktif dengan prosentase THD dari arus kompensasi
pada sisi sumber didefinisikan sebagai harga nilai untuk tuning algoritma genetika. Nilai ini dapat dihitung dari fungsi obyektif seperti gambar 4. Algoritma genetika akan mencoba mencari parameter filter aktif terbaik untuk mencapai nilai % THD minimum sesuai dengan standar IEEE std. 519-1992.
Sesuai dengan gambar 4, langkah-langkah dari pencarian parameter filter aktif dengan AG sebagai berikut :
Langkah 1: Menentukan parameter pita. Di sini kita tentukan nilai batas tegangan limit atas dan bwah dari Vdc, Lf dan HB adalah
ditentukan secara berturut-turut 312-700 V , 0-10 H, and 0-0.02 A.
Langkah 2: Menentukan skema pengkodean populasi AG. Pada makalah ini, skema kromosom dari populasi ditentukan dalam nilai riil [11].
Langkah 3: Tentukan ukuran populasi sama dengan 40 kromosom.
Langkah 4 : Menentukan inisialisasi populasi dengan cara random dengan pencarian ruang parameter.
Langkah 5: Menentukan jumlah generasi maksimum . Di sini diset hingga 1000.
Langkah 6: Menentukan proses seleksi, dalam hal ini roulette. Mutasi yang sama (probabilas =0.07, pindah silang searah (probabilitas=0.7), dan populasi yang diganti dipilih semua.
Gambar 4. Pendekatan AG untuk Filter Daya Aktif
Sistem pada gambar dioperasikan dengan kontrol Filter daya aktif dengan metode histerisis. Parameter filter aktif
Inisialisasi Populasi
Seleksi
Operasi genetik (pindah silang dan
mutasi)
penggantian Parent
ISSN No. 2085 - 0859
didesain dengan algoritma genetika. Nilai obyektif dengan metode algoritma genetika meminimalkan % kompensasi arus THD dan nilai yang sesuai IEEE std 519-1992. Algoritma dapat mencari nilai parameter filter aktif mencapai % THD lebih kecil untuk tiap putaran generasi seperti gambar 5. Dalam paper ini, nilai maksimum generasi diset hingga 1000 dengan AG dapat mencapai % THD sebesar 0,9885 %.
Pada gambar 5, dapat disimpulkan bahwa % THD sama dengan 0.9940% sepanjang generasi adalah =438-519. Hal ini adalah khusus penyelesaian untuk masalah ini. Namun , Algoritma Genetika adalah solusi untuk mencapai % THD yang lebih baik yakni (0.9885%). Kemudian hasil dari AG ini dibandingkan dengan metode Ingram dan Round yang ditampilkan pada tabel 1. Sebagai tambahan, hasil dari gambar 5 juga menunjukkan konvergensi AG untuk masalah ini.
Gambar 5. Konvergensi of % THD
5. Penyajian Data dan simulasi
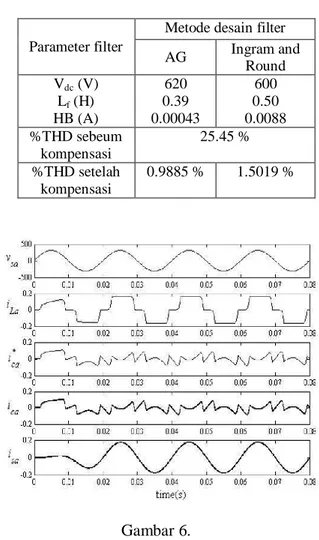
Hasil simulasi sistem pada gambar 1 dengan parameter filter dari pencarian AG yang ditunjukkan pada gambar 6. Hal ini dapat dilihat bahwa sumber arus setelah kompensasi (isa) mendekati gelombang sinusoida. %THD
dari arus ini sama dengan 0.9885% yang sesuai dengan standar IEEE 519-1992, sementara sebelum kompensasi % adalah 25.45%. Hasil simulasi dengan metode Ingram dan Round dapat dilihat pada gambar 7. Dimana, arus setelah kompensasi mendekati gelombang sinusoida seperti pada gambar 6. Bagaimanapun, %THD untuk metode ini adalah 1.5019% dimana lebih besar dari
metode algoritma genetika yakni sebesar 0.9885%. Karena, metode AG dapat menghasilkan %THD yang dibandingkan dengan metode Ingram dan Round. Hasil yang ditunjukkan menunjukkan bahwa AG dapat menghasilkan desain filter yang lebih baik.
Tabel 1.
Kompensasi Algoritma Genetika dengan Metode Ingram dan Round
Parameter filter
Metode desain filter AG Ingram and Round Vdc (V) Lf (H) HB (A) 620 0.39 0.00043 600 0.50 0.0088 %THD sebeum kompensasi 25.45 % %THD setelah kompensasi 0.9885 % 1.5019 % Gambar 6.
ISSN No. 2085 - 0859 Gambar 7.
Hasil simulasi Metode Ingram dan Round
6. Kesimpulan
Makalah ini memaparkan aplikasi algoritma genetika untuk kontrol desain filter daya aktif dengan metode histerisis. Hasil dari desain menyatakan bahwa algoritma genetik dapat meminimalisir % THD dari sumber arus setelah kompensasi. Sebagai tambahan bahwa %THD juga harus mengikuti standar IEEE 519-1992.
Daftar Pustaka
[1]e IEEE Std. 519-1992 ,IEEE
Recommended practices and requirement for harmonic control in electrical power system.
[2]e Zhuo F. , Yang J., Hu J., and Wang Z., 2000,“Study on Active Power Filter used in Three-Phase Four Wire System”, IEEE Power Electronics and Motion Control Conference,vol.3, , pp. 1037-1040
[3] Peng F. Z. and Lai J-S, 1996 , “Generalized instantaneous reactive power theory for threephase power system” IEEE Trans. Instrum. Meas.,vol.45, no.1, February, pp. 293-297
[4] Zeng J. , Yu C. ,Qi Q. , Yan Z., Ni Y., Zhang B.L.,Chen S., and Wu F. F., 2004,
“A Novel Hysteresis Current Control for Active Power Filter with Constant Frequency”, Electric Power Systems Research 68,pp.75-/82
[5] Narongrit T., Areerak K-L. and Srikaew A. 2009. “Design of an Active Power Filter using Adaptive Tabu Search”.
Proceedings of the 8th WSEAS Int.Conf. on Artificial Intelligence pp:314-318 [6] Kennedy J. and Eberhart R., 1995,
“Particle Swarm Optimization” In
Proceedings IEEE International Conference on Neural Networks
Australia, vol 4, pp. 1942-1948
[7] Cupertino F., Marinelli M. Zanchetta P.and Sumner M., 2005 ,„Modelling and Design of Shunt Active Power Filters using Genetic Algorithms”, EPE 2005-Dresden,ISBN: 90-75815-08-5,pp.1-9 [8] Ingram D.M.E. and Round S. D., 1997,
“A Novel Digital Hysteresis Current Controller for an Active Power Filter”,IEEE Transaction, pp. 744-749 [9] Benchaita L. ,Saadate S. and Nia A.S., 1999 “A Comparison of Voltage Source and Current Source Shunt Active Filter by Simulation and
Experimentation”,IEEE Trans., Vol. 14,
No. 2, May,pp.642-647
[10] Tsang K.M. and Chan W.L., 2006, “ Design of single- phase active power filter using analogue cascade controller”,IEE, Vol. 153, No. 5,pp. 735-741
[11] Wright A. H., 1991, “Foundations of Genetic Algorithms”, chapter Genetic Algorithms for Real Parameter Optimization, pages 205-218.
[12] Man, K.F. Tang, K.S. and Kwong S. 1996 “Genetic algorithms: conceptsand applications [in engineering design]”,
IEEE Transactions, Industrial
Electronics, vol: 43, pp. 519-534
[13] T. Narongrit, L. Areerak* And K-N.Areerak, Design of an Active Power Filter using Genetic Algorithm Technique.
ISSN No. 2085 - 0859