METODE RUNGE-KUTTA
UNTUK SOLUSI PERSAMAAN PENDULUM
S K R I P S I
Disusun dalam Rangka Menyelesaikan Studi Strata 1 Untuk Memperoleh Gelar Sarjana Sains
Oleh
Nama : Rahayu Puji Utami NIM : 4150401035
Program studi : Matematika Jurusan : Matematika
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM UNIVERSITAS NEGERI SEMARANG
PENGESAHAN
Telah dipertahankan dihadapkan siding Panitia Ujian Skripsi Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Negeri Semarang pada:
Hari :
Tanggal :
Panitia Ujian
Ketua, Sekretaris,
………. ………
NIP. NIP.
Pembimbing I Anggota Penguji
DR. St Budi Waluyo 1. ...
NIP 132046848 NIP.
Pembimbing II 2. ...
NIP.
Drs. Moch Chotim, M. Si 3. ...
ABSTRAK
Ilmu Pengetahuan banyak memberikan landasan teori bagi perkembangan suatu teknologi, salah satunya adalah matematika. Cabang dari matematika modern yang mempunyai cakupan wilayah penelitian teoritik dan aplikasi luas adalah persamaan differensial. Persamaan diferensial nonlinier khususnya yang berorde dua dapat diselesaikan dengan metode Runge-Kutta. Metode ini mencapai ketelitian yang tinggi untuk kasus tak linier . Satu contoh persamaan differensial nonlinier orde dua adalah persamaan Pendulum yang ditulis dalam bentuk
2
sinθ = 0. Persamaan Pendulum ini sukar dan tidak mungkin diselesaikan secara analitis. Dengan alasan di atas penulis tertarik untuk meneliti tentang metode Runge-Kutta untuk menentukan suatu solusi dari persamaan diferensial nonlinier orde dua khususnya persamaan Pendulum dan menggunakan Maple untuk visualisasinya. Sehingga dalam penulisan skripsi ini penulis mengambil judul “ Metode Runge-Kutta Untuk Solusi Persamaan Pendulum”.
Tujuan penulisan skripsi ini adalah menentukan solusi persamaan diferensial nonlinier orde dua khususnya persamaan Pendulum dengan metode Runge-Kutta dan mengetahui aplikasi program Maple untuk visualisasinya persamaan Pendulum.
Metode yang digunakan dalam penelitian ini adalah studi pustaka. Langkah-langkah yang dilakukan dalam penelitian ini antara lain menentukan masalah, merumuskan masalah, studi pustaka, analisis dan pemecahan masalah, penarikan kesimpulan.
Pada pembahasan dilakukan analisis untuk menentukan solusi persamaan Pendulum dengan menggunakan metode Runge-Kutta. Adapun formula dari metode Runge-Kutta adalah yi+1 = yi + [
6 1
(k1 + 2k2 + 2 k3 + k4 )] h, dengan: k1 = f(xi, yi), k2 = f(xi + ½h, yi + ½hk1), k3 =
f(xi + ½h, yi + ½hk2), k4 = f(xi + h, yi + hk3). Dari solusi tersebut dapat dibuat grafik untuk
beberapa nilai y(0) dan y’(0) dengan menggunakan program Maple.
Dari uraian pada pembahasan dapat disimpulkan bahwa solusi persamaan diferensial nonlinier orde dua 2
2 k4). Dengan program Maple diperoleh grafik untuk beberapa nilai y(0) dan y’(0).
MOTTO DAN PERSEMBAHAN
“Allah tidak membebani seseorang melainkan sesuai dengan kemampuannya” (Q.S. Al Baqoroh: 286)
“Imajinasi lebih berharga daripada sekedar ilmu pasti” (Albert Einstein) “Disaat kita mau berusaha keberhasilan akan selalu menyertai kita”
PERSEMBAHAN
Skripsi penulis peruntukan kepada: 1. Bapak dan Ibu tercinta.
2. Kakak-kakakku, adikku dan semua saudara-saudaraku tercinta.
3. Sahabat-sahabatku yang sangat aku sayangi. 4. Sayankqu always in myheart.
5. Teman-teman seperjuangan (Matematika ’01).
KATA PENGANTAR
Ucapan terima kasih penulis sampaikan kepada:
1. Bapak Drs. H.A.T. Soegito, S.H., M.M. selaku Rektor Universitas Negeri Semarang. 2. Bapak Drs. Kasmadi Imam S., M.S. selaku Dekan FMIPA Universitas Negeri Semarang. 3. Bapak Drs. Supriyono, M.Si. selaku Ketua Jurusan Matematika FMIPA Universitas Negeri
Semarang.
4. DR. ST. Budi Waluyo, M.Si selaku pembimbing I yang telah memberikan bimbingan dan arahan kepada penulis dalam menyusun skripsi ini.
5. Drs. Moch Chotim, M.S selaku Pembimbing II yang telah memberikan bimbingan, dan arahan kepada penulis dalam menyusun skripsi ini.
6. Segenap sivitas akademika di jurusan Matematika FMIPA UNNES.
7. Ayah dan Ibu yang senantiasa mendoakan serta memberikan dorongan baik secara moral maupun spiritual dan segala yang ternilai.
8. Sahabat-sahabatku Nanny, Lidia dan adikku mahda yang telah memberikan dorongan untuk segera menyelesaikan skripsi ini.
9. Mas Dwi yang telah membantu dalam proses penyelesaian skripsi ini.
10. Dea atau Yaya, Kakakku Yuni dan Kakakku Agus yang telah memberikan dorongan untuk segera menyelesaikan skripsi ini.
11. Teman-temanku Rina, Mey, Woro, Eli, Dwi, Taufik, Sigit, Ardi, Bowo, Doni, Aris dan semua angkatan 2001 yang selalu memberiku semangat dan dorongan hingga selesainya skripsi ini.
13.Dan orang-orang yang telah memberikan inspirasi, baik disengaja maupun tidak, serta pihak-pihak yang telah memberikan segala dukungan baik langsung maupun tidak langsung, material maupun immaterial, hingga proses penyusunan skripsi ini berjalan dengan lancar sampai terselesainya skripsi ini.
Akhirnya penulis berharap semoga skripsi ini bermanfaat.
Semarang, Agustus 2005 Penulis
DAFTAR ISI
HALAMAN JUDUL ...i
HALAMAN PENGESAHAN ...ii
ABSTRAK ...iii
MOTTO DAN PERSEMBAHAN ...iv
KATA PENGANTAR ... v
DAFTAR GAMBAR...ix
DAFTAR LAMPIRAN ... x
BAB I PENDAHULUAN ... 1
A. Latar Belakang ... 1
B. Permasalahan... 4
C. Tujuan Penelitian ... 5
D. Manfaat Penelitian ... 5
E. Sistematika Penulisan Skripsi ... 6
BAB II LANDASAN TEORI ... 8
A. Persamaan Diferensial... 8
B. Metode Runge-Kutta ... 11
C. Persamaan Pendulum ... 23
D. Maple... 24
BAB III METODE PENELITIAN ... 27
A. Menemukan Masalah ... 27
B. Merumuskan Masalah ... 27
C. Studi Pustaka ... 27
D. Analisis dan Pemecahan Masalah ... 28
E. Penarikan Kesimpulan ... 28
BAB IV PEMBAHASAN ... 29
A. Solusi persamaan Pendulum dengan menggunakan metode Runge-Kutta 29 B. Aplikasi program Maple untuk visualisasi persamaan Pendulum . 42 BAB IV PENUTUP ... 45
A. Simpulan ... 45
B. Saran-Saran ... 46
BAB II LANDASAN TEORI
A. Persamaan Diferensial
Persamaan diferensial diperoleh berdasarkan pemodelan matematika dari permasalahan yang ada di dalam kehidupan sehari-hari. Sebagai contoh penerapan matematika pada ilmu fisika. Persamaan diferensial dari hukum Newton II yang timbul karena gejala alam, bahwa massa kali percepatan dari suatu benda sama dengan gaya luar yang bekerja pada benda itu. Suatu benda bermassa m bergerak sepanjang sumbu y pada
(4) 2 0
varibel terikat yang tergantung pada varabel bebas tunggal disebut persamaan diferensial
biasa. Persamaan diferensial yang memuat turunan parsial dari satu atau lebih variabel
terikat yang tergantung pada variabel bebas yang tidak tunggal disebut persamaan
diferensial parsial. Persamaan diferensial (1) dan (2) adalah suatu contoh dari persamaan
diferensial biasa. Persamaan diferensial (3) dan (4) merupakan suatu contoh dari persamaan
diferensial parsial.
Orde dari persamaan diferensial adalah derajat atau pangkat tertinggi dari turunan
yang muncul dalam persamaan tersebut. Contoh (1) dan (3) adalah persamaan diferensial
orde satu, persamaan (4) merupakan persamaan diferensial orde dua, dan persamaan (2)
adalah persamaan diferensial orde tiga.
Secara umum persamaan diferensial berorde n dapat dituliskan sebagai
( ) ( )
( )
Suatu fungsi y(t) yang didefinisikan pada suatu interval dikatakan solusi suatu
persamaan diferensial bila untuk variabel bebas t, maka nilai-nilai y(t) dan turunannya bila
disubtitusikan memenuhi persamaan diferensial tersebut. Beberapa contoh solusi dari
persamaan diferensial:
2. Solusi dari persamaan diferensial y = Ae2x+Bex+C
untuk C sembarang konstan.
Solusi pada persamaan diferensial dibedakan menjadi dua yaitu solusi umum dan
solusi khusus. Solusi umum suatu persamaan diferensial adalah solusi yang mengandung
sembarang konstan, sedangkan solusi khusus suatu persamaan diferensial adalah solusi
yang dapat diperoleh dengan memberikan nilai tertentu pada sembarang konstan yang
terdapat pada solusi umum.
Klasifikasi penting persamaan diferensial adalah apakah persamaan diferensial
tersebut linier atau nonlinier. Persamaan diferensial biasa
(
, , 1, , ( )n)
=0diterapkan untuk persamaan diferensial parsial. Jadi persamaan diferensial orde-n secara
umum dapat ditulis sebagai:
( )
( )( )
( )( )
( )
diferensial tidak dapat ditulis dalam bentuk tersebut maka dikatakan persamaan diferensial
tersebut persamaan diferensial nonlinier. Contoh:
(1) xy x
dx dy
sin 3 2 =
+ merupakan persamaan nonlinier,
(2) xy x
dx dy
sin 3 =
+ merupakan persamaan linier, dan
(3) 2 5 6 0
merupakan persamaan nonlinier.
membuat persamaan itu menjadi linier yaitu dengan cara menghampiri persamaan tersebut oleh persamaan diferensial linier (aproximasi).
B. Metode Runge-Kutta
Metode Runge-Kutta mencapai ketelitian suatu pendekatan deret taylor tanpa memerlukan kalkulasi turunan yang lebih tinggi. Banyak perubahan terjadi, tetapi
semuanya dapat ditampung dalam bentuk umum dari persamaan:
Yi+1 = y1 + φ (x1, y1, h) h (1)
dimana φ (x1, y1, h) disebut suatu fungsi yang dapat diinterpretasikan sebagai sebuah slope
rata-rata sepanjang interval. Fungsi tersebut dapat ditulis dalam bentuk umum sebagai
berikut:
φ = a1k1 + a2 k2 + … + ankn (2)
dimana setiap a adalah konstanta dan setiap k besarnya adalah:
k1 = f(xi , yi ) (3)
k2 = f(xi + p1h, yi + q11k1h) (4)
k3 = f(xi + p2h, yi + q21k1h + q22k2h) (5)
.
.
.
kn = f(xi + p n-1h, yi + qn-1,1 k1h + qn-1,2 k2h
+ … + qn-1,n-1 kn-1h) (6)
Semua harga k berhubungan secara rekursif. Artinya k1 muncul dalam persamaan untuk k2,
yang muncul lagi dalam persamaan untuk k3, dan seterusnya. Rekurensi ini membuat
Berbagai jenis metode Runge-Kutta dapat direncanakan dengan melaksanakan jumlah suku-suku yang berbeda pada fungsi tersebut seperti dinyatakan oleh n. Pada RK orde pertama dengan n = 1 ternyata adalah metode Euler. Sekali n telah dipilih, harga-harga untuk setiap a, p, dan q dievaluasikan dengan memberikan harga persamaan: yi+1 =
yi + φ h sama dengan suku-suku pada sebuah perluasan deret taylor. Jadi sekurang-kurangnya untuk versi orde lebih rendah, jumlah suku n biasanya menunjukkan orde pendekatan. Misalnya pada pasal berikut ini, metode RK orde kedua menggunakan sebuah
fungsi inkremen dengan dua suku (n = 2). Metode orde kedua ini akan eksak bila solusi untuk persamaan persamaan diferensial adalah kuadratik. Tambahan pula, disebabkan
suku-suku dengan h3 danlebih tinggi dihilangkan, selama penurunan, kesalahan pemotongan lokal 0(h3) dan kesalahan global adalah 0(h2). Pada pasal-pasal berikutnya
dikembangkan metode RK orde ketiga dan keempat (n = 3 dan 4 ). Untuk kasus-kasus ini,
kesalahan-kesalahan pemotongan global masing-masing adalah 0(h3) dan 0(h4).
Metode Rungga-Kutta orde kedua versi orde kedua dari persamaan (1) atau yi+1 =
yi + φ (xi, yi, h) h adalah:
yi+1 = yi + (a1k1 + a2k2 ) h (7)
dengan:
k1 = f(xi,yi) (8)
k2 = f(xi + p1h, yi + q11k1h) (9)
Harga-harga untuk a1 dan a2, p1, q11 diselesaikan dengan menyamakan persamaan (7)
menurunkan tiga persamaan untuk menyelesaikan empat konstanta yang tidak dikenal. Ketiga persamaan itu adalah:
a1 + a2 = 1 (10)
a2 p1 =
2 1
(11)
a2 q11 =
2 1
(12)
Karena kita memilika tiga persamaan dengan empat yang tidak dikenal, kita harus
menganggap sebuah harga dari salah satu yang tidak dikenal tersebut untuk menentukan
ketiga buah yang lainnya. Misalkan kita nyatakan sebuah harga untuk a2. Kemudian
persamaan (10) sampai (12) dapat diselesakan secara simultan untuk:
a1 = 1 - a2 (13)
p1 = q11 =
2 2
1
a (14)
Karena kita dapat memilih sejumlah tak hingga harga untuk a2, maka terdapat sejumlah tak
hingga metode RK orde kedua. Setiap versi akan mengandung hasil-hasil yang sama secara
eksak, jika solusi untuk PDB adalah kuadratik, linier atau sebuah konstanta. Tetapi
versi-versi itu mengandung hasil-hasil yang berbeda kalau (dalam kasus sejenis), solusi tersebut
adalah lebih rumit. Kita akan memberikan tiga buah versi yang paling lazim digunakan
Metode Heun dengan sebuah korektor tunggal (a2 =
Persamaan (13) dan (14) dapat diselesaikan untuk a1 =
2 1
dan p1 = q11 = 1.
Parameter-parameter ini kemudian dimasukkan kedalam persamaan (7) sehingga:
yi+1 = yi + (
Konsekuensinya metode RK orde kedua sebenarnya adalah teknik heun dengan sebuah korektor iterasi tunggal.
Metode Poligon yang diperbaiki (a2 =
Metode Raltson (a2 =
kesalahan pemotongan untuk algoritma RK orde kedua. Untuk versi ini, a1 = 3
1. Gunakan metode poligon yang diperbaiki dan metode raltson untuk mengintegrasikan
secara numerik dari persamaan berikut ini;
f(x,y) = - 2x3 + 12x2 - 20x + 8,5
dari x = 0 hingga x = 4 dengan menggunakan ukuran langkah = 0,5.
Penyelesaian:
Langkah pertama menggunakan metode poligon yang diperbaiki yaitu dengan menggunakan persamaan (19) guna menghitung
k1 = - 2 (0)3 + 12 (0)2 – 20 (0) + 8,5 = 8,5
k2 = - 2 (0,25)3 + 12 (0,25)2 – 20 (0,25) + 8,5 = 4,21875
Pada metode raltson, k1 untuk interval pertama juga berharga 8,5 maka:
k2 = - 2 (0,375)3 + 12 (0,375)2 – 20 (0,375) + 8,5 = 2,58203125
Slope rata-rata dihitung oleh:
φ= 3 1
(8,5) + 3 2
(2,58203125) = 4,5546875
yang digunakan untuk memprediksikan:
y (0,5) = 1 + 4,5546875(0,5) = 3,27734375
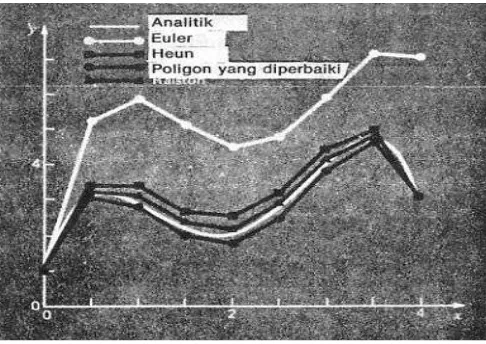
Gambar 1.1 Perbandingan solusi sebenarnya dan solusi numerik dengan menggunakan
tiga buah metode RK orde kedua serta metode Euler
Metode Runge-Kutta orde ketiga untuk n = 3, suatu turunan yang serupa dengan
penurunan buat metode orde kedua dapat dilaksanakan. Hasil dari turunan ini adalah enam
persamaan dengan delapan yang tidak dikenal. Karena itu, harga-harga untuk dua buah
yang tidak dikenal tersebut harus dispesifikasikan sebelumnya agar dapat menentukan
parameter-parameter sisanya. Sebuah versi yang umum mamberikan hasil:
yi+1 = yi + [
6 1
dengan:
Jika turunan tersebut hanyalah sebuah fungsi x, metode orde ketiga ini terediksi menjadi
aturan simpson 3 1
. Raltson (1962) serta raltson dan rabinowitz (1978) telah
mengembangkan suatu versi alternatif yang memberikan sebuah batas minimal pada
kesalahan pemotongan. Pada sembarang hal, metode RK orde ketiga tersebut mempunyai
kesalahan-kesalahan lokal dan global masing-masing sebesar 0(h4) dan 0(h3) serta
mengandung hasil-hasil eksak jika solusi tersebut adalah sebuah kubik. Seperti terlihat
pada contoh berikut, jika kita berhadapan dengan polinomial, persamaan (24) juga akan
eksak bila persamaan diferensial adalah kubik dan solusi tersebut adalah kuadratik. Ini
disebabkan aturan simpson 3 1
memberikan perkiraan integral yang eksak untuk kubik.
Contoh:
1. Gunakan persamaan (24) untuk mengintegrasikan:
(a) Sebuah PDB yang semata-mata fungsi x:
dx dy
= - 2x 3 + 12x2 – 20x + 8,5
dengan y(0) = 1 dan ukuran langkah = 0,5
(b) Sebuah PDB yang merupakan fungsi x dan y:
dx dy
dengan y(0) = 2 dari x = 0 hingga 1 serta ukuran langkah sebesar satu.
Penyelesaian:
(a) Persamaan (25) sampai (27) dapat digunakan untuk
menghitung:
k1 = - 2 (0)3 + 12 (0)2 – 20 (0) + 8,5 = 8,5
k2 = - 2 (0,25)3 + 12 (0,25)2 – 20 (0,2005) + 8,5 = 4,21875
k3 = - 2 (0,5)3 + 12 (0,5)2 – 20 (0,5) + 8,5 = 1,25
yang dapat disubstitusikan kedalam persamaan (3.2) maka:
y (0,5) = 1 + { 6 1
[ 8,5 + 4 (4,21875) + 1,25 ]} 0,5 = 3,21875.
Jadi, karena solusi sebenarnya adalah sebuah polinomial orde keempat, aturan
simpson 3 1
memberikan sebuah hasil yang eksak.
(b) Persamaan (25) sampai (27) dapat digunakan untuk
menghitung:
k1 = 4e0,8 (0) – 0,5 (2) = 3
k2 = 4e0,8 (0,5) – 0,5 [ 2 + 0,5 (1) 3 ] = 4,21729879
k3 = 4e0,8 (1,0) – 0,5 [ 2 – 1 (3) + 2 (1) 4,21729879 ] = 5,18486492
yang dapat disubstitusikan kedalam persamaan (24) maka:
y (1,0) = 1 + { 6 1
[ 3 + 4 (4,21729879) + 5,18486492 ]}1
= 6,175676681.
Metode Runge-Kutta orde keempat, metode RK ini yang paling populer adalah
orde keempat. Seperti halnya pendekatan orde kedua, terdapat sejumlah tak hingga versi.
Yang berikut ini seringkali disebut dengan metode RK orde keempat klasik:
yi+1 = yi + [
ekuivalen pula terhadap aturan simpson 3 1
.
Contoh:
1. Gunakan metode RK orde keempat klasik untuk mengintegrasikan:
f(x,y) = - 2x3 + 12x2 – 20x + 8,5
dengan menggunakan ukuran langkah sebesar 0,5 dan suatu kondisi awal y = 1 pada x =
0.
Penyelesaian:
Persamaan (29) sampai (32) dapat digunakan untuk menghitung:
k1 = - 2 (0)3 + 12 (0)2 – 20 (0) + 8,5 = 8,5
k2 = - 2 (0,25)3 + 12 (0,25)2 – 20 (0,25) + 8,5 = 4,21875
k4 = - 2 (0,5)3 + 12 (0,5)2 – 20 (0,5) + 8,5 = 1,25
yang dapat disubstitusikan kedalam persamaan (28) maka:
y (0,5) = 1 + { 6 1
[ 8,5 + 2 (4, 21875) + 2 (4, 21875) + 1,25 ]} 0,5
= 3,21875.
Metode orde keempat memberikan suatu hasil yang eksak.
Metode Runge-Kutta orde lebih tinggi. Bilamana diperlukan suatu hasil yang lebih teliti,
maka metode RK orde kelima butcher (1964) merekomendasikan:
yi+1 = yi + h[
Metode Runge-Kutta Fehlberg yang didasarkan pada perhitungan dua metode RK
dari orde yang berbeda,dengan mengurangkan hasil-hasilnya untuk mendapatkan suatu
yi+1 = yi + (
bersama dengan suatu formula orde kelima:
yi+1 = yi + (
Persamaan Pendulum ( Ayunan )
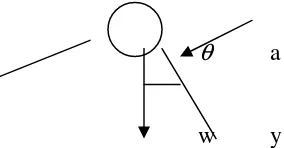
Sebagai contoh bandul sederhana atau persamaan ini sering disebut dengan
persamaan pendulum seperti gambar 1:
R
θ a
w y
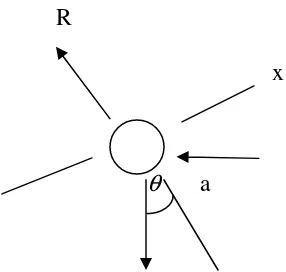
Gambar 1 Sebuah diagram bebas dari bandul berayun memperlihatkan gaya-gaya pada
partikel serta percepatan.
Partikel dengan berat W tersebut digantungkan pada sebuah batang tanpa berat yang
panjangnya l. Gaya yang bekerja pada partikel hanyalah beratnya serta tegangan R pada batang. Posisi partikel pada sembarang waktu dinyatakan dengan lengkap dalam sudut
dan l. Pada bandul berayun gaya bekerja pada partikel dan pada percepatan. Dalam hal ini diterapkan hukum gerak Newton kedua dalam arah x yang menyinggung lintasan partikel,
yang diberikan dengan:
−
dimana g adalah konstanta gravitasi (32,2 ft/dt2) dan a adalah percepatan dalam arah
x. Percepatan sudut partikel (α) menjadi:
α
=Persamaan ini merupakan persamaan diferensial tak linier orde kadua.
B. Maple
kemampuan menyederhanakan persamaan diferensial sehingga solusi persamaan
diferensial dapat dipahami dengan baik. Keunggulan dari Maple untuk aplikasi persamaan
diferensial adalah kemampuan melakukan animasi (gerakan) grafik dari suatu fenomena
gerakan yang dimodelkan ke dalam persamaan diferensial yang mempunyai nilai awal dan
syarat batas.
Statement yang sering digunakan untuk keperluan menyelesaikan permasalahan persamaan diferensial antara lain: diferensial digunakan untuk mendiferensialkan
(menurunkan) suatu fungsi, dsolve digunakan untuk menyelesaikan persamaan diferensial,
evalf memberikan nilai numerik dari suatu persamaan, dan simplify digunakan untuk menyederhanakan suatu persamaan. Namun tentu saja pernyataan-pernyataan awal seperti
restart dan deklarasi variable atau konstanta yang diperlukan tidak boleh diabaikan. Sedangkan untuk membuat grafik digunakan perintah plot, plot 2d, plot 3d, tergantung dimensi dari pernyataan yang dimiliki, untuk membuat animasi digunakan perintah animate
3d. Setiap perintah pada maple harus dituliskan setelah tanda maple prompt yang diakhiri dengan titik dua (bila hasilnya tidak akan ditampilkan) atau titik koma (bila hasilnya akan
ditampilkan).
Maple merupakan salah satu perangkat lunak (software) yang dikembangkan oleh waterloo inc. Kanada untuk keperluan computer algebraic System (CAS). Menu-menu yang terdapat pada tampilan maple terdiri dari menu: file, edit, view, insert, format, spreadsheat,
option, window, dan help merupakan menu standar yang dikembangkan untuk program
aplikasi pada system windows.
masukan (input) pada maple merupakan deklarasi pada bahasa program dan perintah (command) yang sering digunakan pada bahasa aplikasi.
Maple bisa dipakai untuk menganalisis model dan menginterpretasikan solusi yang diperoleh ke masalah nyata yang telah di modelkan. Maple sangat dibutuhkan untuk
BAB III
METODE PENELITIAN
Metode yang digunakan dalam penelitian ini adalah studi pustaka. Langkah-langkah yang
digunakan dalam penelitian ini sebagai berikut:
A. Menemukan Masalah
Dalam tahap ini dicari sumber pustaka dan dipilih bagian dari sumber pustaka sebagai
suatu masalah.
B. Merumuskan Masalah
Masalah yang ditemukan kemudian dirumuskan dalam pertanyaan yang harus
diselesaikan yaitu:
1. Bagaimana menentukan solusi persamaan pendulum dengan menggunakan metode
Runge-Kutta?
2. Bagaimana aplikasi program Maple untuk visualisasi persamaan pendulum?
C. Studi Pustaka
Dalam tahap ini dilakukan kajian sumber-sumber pustaka dengan cara mengumpulkan
data atau informasi yang berkaitan dengan permasalahan, mengumpulkan konsep pendukung
seperti definisi dan teorema serta membuktikan teorema-teorema yang diperlukan untuk
menyelesaikan permasalahan. Sehingga didapat suatu ide mengenai bahan dasar
pengembangan upaya pemecahan masalah.
Dari berbagai sumber pustaka yang menjadi bahan kajian, diperoleh suatu pemecahan
permasalahan diatas. Selanjutnya dilakukan langkah-langkah pemecahan masalah sebagai
berikut:
1. Menjelaskan bagaimana menentukan solusi persamaan pendulum dengan menggunakan
metode Runga-Kutta.
2. Menjelaskan bagaimana aplikasi program Maple untuk visualisasi persamaan pendulum.
E. Penarikan simpulan
Tahap ini merupakan tahap akhir dari penelitian. Penarikan simpulan dari
BAB IV PEMBAHASAN
A. Solusi persamaan pendulum dengan menggunakan metode Runge-Kutta
Perhatikan persamaan pendulum atau persamaan ayunan dari partikel dengan berat W yang digantung pada sebuah batang dan dengan panjang l. gaya yang bekerja pada partikel hanyalah beratnya serta tegangan R pada batang. Posisi partikel pada sembarang waktu
dinyatakan dengan lengkap dalam sudut θ dan l. Gaya yang bekerja pada partikel serta percepatan. Ada baiknya menerapkan hukum gerak Newton kedua dalam arah x yang menyinggung lintasan partikel:
− Percepatan sudut partikel (α) menjadi:
α
= l a.
Dalam koordinat polar, Fdisajikan dengan
Solusi 1: Suatu persamaan diferensial dapat direduksi menjadi suatu bentuk yang dapat diselesaiakan secara analitis. Perluasan deret untuk sin θ diberikan oleh:
sin θ = θ -
perpindahan yang kecil, persamaan (1) menjadi:
2
yang merupakan sebuah persamaan diferensial liniear orde dua. Aproksimasi ini sangat
penting, karena persamaan (3) mudah diselesaikan secara analitis. Solusi yang didasarkan
pada teori persamaan diferensial diberikan oleh:
θ(t) =
θ
0 cos l gt (4)
dengan
θ
0 adalah perpindahan pada t = 0 dan dianggap bahwa kecepatan ( v = dt dθ) dari
partikel adlah nol pada t = 0. Waktu yang diperlukan oleh partikel menyempurnakan suatu
siklus osilasi yang disebut periode dan diberikan oleh:
T = 2π g
l .
Pada persamaan (3) ditransformasikan menjadi dua persamaan orde pertama supaya dapat
diselesaikan yaitu sebagai berikut:
Jelas
terhadap persamaan orde kedua.
Solusi 2: teknik aproksimasi numerik dapat digunakan untuk menyelesaikan persamaan diferensial dengan metode Runge-Kutta orde empat.
(1) Solusi numerik dengan metode Runge-Kutta orde empat memberikan
hasil-hasil sebagai berikut: (dengan menggantiθ = x dan ukuran langkah
dengan metode RK untuk x1:
k1 = h/2 *f (x[n], y[n], yp[n]) = - 0,09588510770
K = h/2*( yp[n] + k1/2) = 0,04520574462
k2 = h/2*f(x[n] + h/2, y[n] + K, yp[n] + k1) = -0,07864102030
k3 = h/2*f(x[n] + h/2, y[n] + K, yp[n] + k2) = - 0,08180018910
L = h*( yp[n] + k3) = 0,08363996218
k4 = h/2*f(x[n] + h, y[n] + L, yp[n] + 2*k3) = - 0,06601813295
x[n + 1] = x[n] + h = 0,2
y[n + 1] = y[n] + h*(yp[n] + 1/3*(k1 + k2 + k3) = 1,082911579
yp[n + 1] = yp[n] + 1/3*(k1 + 2*k2 + 2*k3 + k4) = 0,3390714468
untuk x2:
k1 = h/2 *f (x[n], y[n], yp[n]) = - 0,06652231010
K = h/2*( yp[n] + k1/2) = 0,3058102918
k2 = h/2*f(x[n] + h/2, y[n] + K, yp[n] + k1) = - 0,05383747025
k3 = h/2*f(x[n] + h/2, y[n] + K, yp[n] + k2) = - 0,05627639640
L = h*( yp[n] + k3) = 0,5655901008
k4 = h/2*f(x[n] + h, y[n] + L, yp[n] + 2*k3) = - 0,04491729586
x[n + 1] = x[n] + h = 0,4
y[n + 1] = y[n] + h*(yp[n] + 1/3*(k1 + k2 + k3) = 1,138950123
yp[n + 1] = yp[n] + 1/3*(k1 + 2*k2 + 2*k3 + k4) = 0,2285156670
untuk x3:
k1 = h/2 *f (x[n], y[n], yp[n]) = - 0,04530640556
k2 = h/2*f(x[n] + h/2, y[n] + K, yp[n] + k1) = - 0,03643721152
k3 = h/2*f(x[n] + h/2, y[n] + K, yp[n] + k2) = - 0,03817990754
L = h*( yp[n] + k3) = 0,03806715190
k4 = h/2*f(x[n] + h, y[n] + L, yp[n] + 2*k3) = - 0,03031388552
x[n + 1] = x[n] + h = 0,6
y[n + 1] = y[n] + h*(yp[n] + 1/3*(k1 + k2 + k3) = 1,176658355
yp[n + 1] = yp[n] + 1/3*(k1 + 2*k2 + 2*k3 + k4) = 0,1535641572
untuk x4:
k1 = h/2 *f (x[n], y[n], yp[n]) = - 0,03059226228
K = h/2*( yp[n] + k1/2) = 0,01382680261
k2 = h/2*f(x[n] + h/2, y[n] + K, yp[n] + k1) = - 0,02453243944
k3 = h/2*f(x[n] + h/2, y[n] + K, yp[n] + k2) = - 0,02573479406
L = h*( yp[n] + k3) = 0,02556587262
k4 = h/2*f(x[n] + h, y[n] + L, yp[n] + 2*k3) = - 0,02038346022
x[n + 1] = x[n] + h = 0,8
y[n + 1] = y[n] + h*(yp[n] + 1/3*(k1 + k2 + k3) = 1,201980553
yp[n + 1] = yp[n] + 1/3*(k1 + 2*k2 + 2*k3 + k4) = 0,1030607607
untuk x5:
k1 = h/2 *f (x[n], y[n], yp[n]) = - 0,02057568278
K = h/2*( yp[n] + k1/2) = 0,009277291930
k2 = h/2*f(x[n] + h/2, y[n] + K, yp[n] + k1) = - 0,01647831491
k3 = h/2*f(x[n] + h/2, y[n] + K, yp[n] + k2) = - 0,01729486170
k4 = h/2*f(x[n] + h, y[n] + L, yp[n] + 2*k3) = - 0,01368350958
x[n + 1] = x[n] + h = 1,0
y[n + 1] = y[n] + h*(yp[n] + 1/3*(k1 + k2 + k3) = 1,218969448
yp[n + 1] = yp[n] + 1/3*(k1 + 2*k2 + 2*k3 + k4) = 0,06912557884
untuk x6:
k1 = h/2 *f (x[n], y[n], yp[n]) = - 0,01381410820
K = h/2*( yp[n] + k1/2) = 0,006221852475
k2 = h/2*f(x[n] + h/2, y[n] + K, yp[n] + k1) = - 0,01105665440
k3 = h/2*f(x[n] + h/2, y[n] + K, yp[n] + k2) = - 0,01160725904
L = h*( yp[n] + k3) = 0,01150366396
k4 = h/2*f(x[n] + h, y[n] + L, yp[n] + 2*k3) = - 0,009178986740
x[n + 1] = x[n] + h = 1,2
y[n + 1] = y[n] + h*(yp[n] + 1/3*(k1 + k2 + k3) = 1,230362696
yp[n + 1] = yp[n] + 1/3*(k1 + 2*k2 + 2*k3 + k4) = 0,04635193824
untuk x7:
k1 = h/2 *f (x[n], y[n], yp[n]) = - 0,09267068430
K = h/2*( yp[n] + k1/2) = 0,004171840402
k2 = h/2*f(x[n] + h/2, y[n] + K, yp[n] + k1) = - 0,007415274000
k3 = h/2*f(x[n] + h/2, y[n] + K, yp[n] + k2) = - 0,007785365315
L = h*( yp[n] + k3) = 0,007713314584
k4 = h/2*f(x[n] + h, y[n] + L, yp[n] + 2*k3) = - 0,006155269410
x[n + 1] = x[n] + h = 1,4
yp[n + 1] = yp[n] + 1/3*(k1 + 2*k2 + 2*k3 + k4) = 0,03107739942
untuk x8:
k1 = h/2 *f (x[n], y[n], yp[n]) = - 0,06214479440
K = h/2*( yp[n] + k1/2) = 0,002797015970
k2 = h/2*f(x[n] + h/2, y[n] + K, yp[n] + k1) = - 0,004972071700
k3 = h/2*f(x[n] + h/2, y[n] + K, yp[n] + k2) = - 0,005220472550
L = h*( yp[n] + k3) = 0,005171385374
k4 = h/2*f(x[n] + h, y[n] + L, yp[n] + 2*k3) = - 0,004126997926
x[n + 1] = x[n] + h = 1,6
y[n + 1] = y[n] + h*(yp[n] + 1/3*(k1 + k2 + k3) = 1,243123581
yp[n + 1] = yp[n] + 1/3*(k1 + 2*k2 + 2*k3 + k4) = 0,02083521080
untuk x9:
k1 = h/2 *f (x[n], y[n], yp[n]) = - 0,004166740676
K = h/2*( yp[n] + k1/2) = 0,001875184046
k2 = h/2*f(x[n] + h/2, y[n] + K, yp[n] + k1) = - 0,003333539656
k3 = h/2*f(x[n] + h/2, y[n] + K, yp[n] + k2) = - 0,003500155534
L = h*( yp[n] + k3) = 0,003467011054
k4 = h/2*f(x[n] + h, y[n] + L, yp[n] + 2*k3) = - 0,002766891678
x[n + 1] = x[n] + h = 1,8
y[n + 1] = y[n] + h*(yp[n] + 1/3*(k1 + k2 + k3) = 1,246557261
yp[n + 1] = yp[n] + 1/3*(k1 + 2*k2 + 2*k3 + k4) = 0,01396820322
untuk x10:
K = h/2*( yp[n] + k1/2) = 0,001257142832
k2 = h/2*f(x[n] + h/2, y[n] + K, yp[n] + k1) = - 0,002234884170
k3 = h/2*f(x[n] + h/2, y[n] + K, yp[n] + k2) = - 0,002346609966
L = h*( yp[n] + k3) = 0,002324318650
k4 = h/2*f(x[n] + h, y[n] + L, yp[n] + 2*k3) = - 0,00 1854970062
x[n + 1] = x[n] + h = 2,0
y[n + 1] = y[n] + h*(yp[n] + 1/3*(k1 + k2 + k3) = 1,248859232
yp[n + 1] = yp[n] + 1/3*(k1 + 2*k2 + 2*k3 + k4) = 0,009364367172
untuk x11:
k1 = h/2 *f (x[n], y[n], yp[n]) = - 0,001872846062
K = h/2*( yp[n] + k1/2) = 0,0008427944140
k2 = h/2*f(x[n] + h/2, y[n] + K, yp[n] + k1) = - 0,001498290207
k3 = h/2*f(x[n] + h/2, y[n] + K, yp[n] + k2) = - 0,001573199169
L = h*( yp[n] + k3) = 0,001558233601
k4 = h/2*f(x[n] + h, y[n] + L, yp[n] + 2*k3) = - 0,001243585753
x[n + 1] = x[n] + h = 2,2
y[n + 1] = y[n] + h*(yp[n] + 1/3*(k1 + k2 + k3) = 1,250402483
yp[n + 1] = yp[n] + 1/3*(k1 + 2*k2 + 2*k3 + k4) = 0,006277896983
(2) Solusi numerik dengan metode Runge-Kutta orde empat de
> restart:
> with(plots):
> pdb := diff(y(x),x$2)+2*sin((y(x)))=0;
:=
pdb + =
d d2
x2y( )x 2sin ( )(y x ) 0
sol := y( )x =
> #solek:= subs(x=x[n],sol);
> f:=(x,y,yp)->-2*sin(yp);
:=
f (x y yp, , ) → −2sin(yp)
h:=0.1;N:=10;x[0]:=0;y[0]:=1;yp[0]:=0.5;
dengan metode RK untuk x1:
y[n + 1] = y[n] + h*(yp[n] + 1/3*(k1 + k2 + k3) = 1,082924023
yp[n + 1] = yp[n] + 1/3*(k1 + 2*k2 + 2*k3 + k4) = 0,3390381808
untuk x3:
k1 = h/2 *f (x[n], y[n], yp[n]) = - 0,03325801785
K = h/2*( yp[n] + k1/2) = 0,01612045860
k2 = h/2*f(x[n] + h/2, y[n] + K, yp[n] + k1) = -0,03010372398
k3 = h/2*f(x[n] + h/2, y[n] + K, yp[n] + k2) = - 0,03040437109
L = h*( yp[n] + k3) = 0,03086338097
k4 = h/2*f(x[n] + h, y[n] + L, yp[n] + 2*k3) = - 0,02746536086
x[n + 1] = x[n] + h =0,3
y[n + 1] = y[n] + h*(yp[n] + 1/3*(k1 + k2 + k3) = 1,113702304
yp[n + 1] = yp[n] + 1/3*(k1 + 2*k2 + 2*k3 + k4) = 0,2784583245
untuk x4:
k1 = h/2 *f (x[n], y[n], yp[n]) = - 0,02748736851
K = h/2*( yp[n] + k1/2) = 0,01323573201
k2 = h/2*f(x[n] + h/2, y[n] + K, yp[n] + k1) = -0,02483446138
k3 = h/2*f(x[n] + h/2, y[n] + K, yp[n] + k2) = - 0,02509135330
L = h*( yp[n] + k3) = 0,02533669712
k4 = h/2*f(x[n] + h, y[n] + L, yp[n] + 2*k3) = - 0,02262982125
x[n + 1] = x[n] + h =0,4
y[n + 1] = y[n] + h*(yp[n] + 1/3*(k1 + k2 + k3) = 1,138967697
yp[n + 1] = yp[n] + 1/3*(k1 + 2*k2 + 2*k3 + k4) = 0,2284687180
k1 = h/2 *f (x[n], y[n], yp[n]) = - 0,02264862990
K = h/2*( yp[n] + k1/2) = 0,01085722015
k2 = h/2*f(x[n] + h/2, y[n] + K, yp[n] + k1) = -0,02043700076
k3 = h/2*f(x[n] + h/2, y[n] + K, yp[n] + k2) = - 0,02065344559
L = h*( yp[n] + k3) = 0,02078152724
k4 = h/2*f(x[n] + h, y[n] + L, yp[n] + 2*k3) = - 0,01860710400
x[n + 1] = x[n] + h =0,5
y[n + 1] = y[n] + h*(yp[n] + 1/3*(k1 + k2 + k3) = 1,159689933
yp[n + 1] = yp[n] + 1/3*(k1 + 2*k2 + 2*k3 + k4) = 0,1873231758
untuk x6:
k1 = h/2 *f (x[n], y[n], yp[n]) = - 0,01862295688
K = h/2*( yp[n] + k1/2) = 0,008900584870
k2 = h/2*f(x[n] + h/2, y[n] + K, yp[n] + k1) = -0,01679011621
k3 = h/2*f(x[n] + h/2, y[n] + K, yp[n] + k2) = - 0,01697077004
L = h*( yp[n] + k3) = 0,01703524058
k4 = h/2*f(x[n] + h, y[n] + L, yp[n] + 2*k3) = - 0,01527809352
x[n + 1] = x[n] + h =0,6
y[n + 1] = y[n] + h*(yp[n] + 1/3*(k1 + k2 + k3) = 1,176676122
yp[n + 1] = yp[n] + 1/3*(k1 + 2*k2 + 2*k3 + k4) = 0,1535155682
untuk x7:
k1 = h/2 *f (x[n], y[n], yp[n]) = - 0,01529132940
K = h/2*( yp[n] + k1/2) = 0,007293495175
k3 = h/2*f(x[n] + h/2, y[n] + K, yp[n] + k2) = - 0,01392827993
L = h*( yp[n] + k3) = 0,01395872883
k4 = h/2*f(x[n] + h, y[n] + L, yp[n] + 2*k3) = - 0,01253285728
x[n + 1] = x[n] + h =0,7
y[n + 1] = y[n] + h*(yp[n] + 1/3*(k1 + k2 + k3) = 1,190594410
yp[n + 1] = yp[n] + 1/3*(k1 + 2*k2 + 2*k3 + k4) = 0,1257696854
untuk x8:
k1 = h/2 *f (x[n], y[n], yp[n]) = - 0,01254383764
K = h/2*( yp[n] + k1/2) = 0,005974888330
k2 = h/2*f(x[n] + h/2, y[n] + K, yp[n] + k1) = -0,01129840752
k3 = h/2*f(x[n] + h/2, y[n] + K, yp[n] + k2) = - 0,01142214426
L = h*( yp[n] + k3) = 0,01143475411
k4 = h/2*f(x[n] + h, y[n] + L, yp[n] + 2*k3) = - 0,01027437674
x[n + 1] = x[n] + h =0,8
y[n + 1] = y[n] + h*(yp[n] + 1/3*(k1 + k2 + k3) = 1,201995899
yp[n + 1] = yp[n] + 1/3*(k1 + 2*k2 + 2*k3 + k4) = 0,1030165795
untuk x9:
k1 = h/2 *f (x[n], y[n], yp[n]) = - 0,01028344670
K = h/2*( yp[n] + k1/2) = 0,004893742808
k2 = h/2*f(x[n] + h/2, y[n] + K, yp[n] + k1) = -0,009260028120
k3 = h/2*f(x[n] + h/2, y[n] + K, yp[n] + k2) = - 0,009361925385
L = h*( yp[n] + k3) = 0,009365465412
x[n + 1] = x[n] + h =0,9
y[n + 1] = y[n] + h*(yp[n] + 1/3*(k1 + k2 + k3) = 1,211334044
yp[n + 1] = yp[n] + 1/3*(k1 + 2*k2 + 2*k3 + k4) = 0,08436769680
untuk x10:
k1 = h/2 *f (x[n], y[n], yp[n]) = - 0,008426764550
K = h/2*( yp[n] + k1/2) = 0,004007715726
k2 = h/2*f(x[n] + h/2, y[n] + K, yp[n] + k1) = -0,007586796110
k3 = h/2*f(x[n] + h/2, y[n] + K, yp[n] + k2) = - 0,007670548175
L = h*( yp[n] + k3) = 0,007669714862
k4 = h/2*f(x[n] + h, y[n] + L, yp[n] + 2*k3) = - 0,006897179865
x[n + 1] = x[n] + h = 1,0
y[n + 1] = y[n] + h*(yp[n] + 1/3*(k1 + k2 + k3) = 1,218981343
yp[n + 1] = yp[n] + 1/3*(k1 + 2*k2 + 2*k3 + k4) = 0,06908815248
untuk x11:
k1 = h/2 *f (x[n], y[n], yp[n]) = - 0,006903320400
K = h/2*( yp[n] + k1/2) = 0,003281824614
k2 = h/2*f(x[n] + h/2, y[n] + K, yp[n] + k1) = -0,006214476220
k3 = h/2*f(x[n] + h/2, y[n] + K, yp[n] + k2) = - 0,006283226015
L = h*( yp[n] + k3) = 0,006280492646
k4 = h/2*f(x[n] + h, y[n] + L, yp[n] + 2*k3) = - 0,005649161025
x[n + 1] = x[n] + h =1,1
y[n + 1] = y[n] + h*(yp[n] + 1/3*(k1 + k2 + k3) = 1,225243457
B. Aplikasi program Maple untuk visualisasi persamaan pendulum.
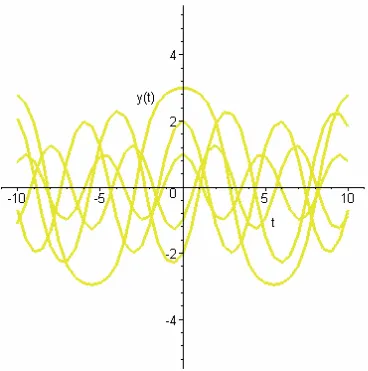
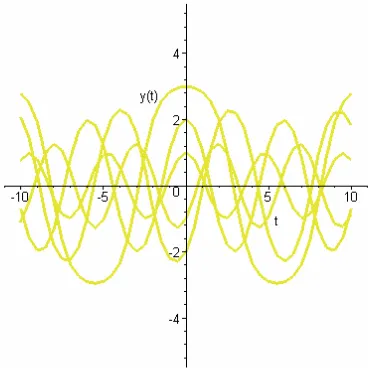
1. Phase portrait persamaan (1) dengan k = 2 untuk y(0) = 1, y’(0) = 0, y(0) = 2, y’(0) = 0, y(0) = 3, y’(0) = 0, y(0) = -1, y’(0) = 1, y(0) = -2, y’(0) = 1, x = -10..10 dan y = -5..5, h =
0,5 dapat dilihat pada gambar 1.
Gambar 1.Phase portrait persamaan (1.1)
Phase portrait atau bidang fase merupakan bidang gerakan pergeseran y dan
kecepatan dt dy
= y’ sebagai koordinator persegi panjang. Bidang ini sangat penting untuk
mempelajari sifat umum suatu solusi terutama untuk persamaan-persamaan diferensial
nonlinier. Gambar-gambar phase portrait diatas merupakan kurva solusi dari persamaan
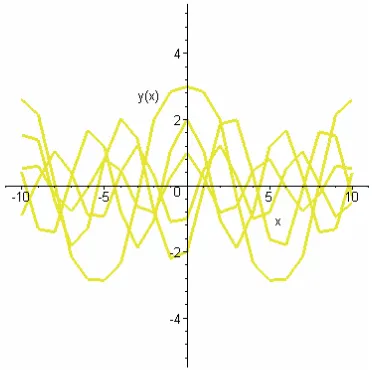
pendulum atau persamaan ayunan. Grafik-grafik pada gambar 1 dan gambar 2 diatas
menggambarkan lintasan persamaan pendulum untuk beberapa nilai y(0) dan y’(0). Pada
ganbar 1 dengan y(0) = 1, y’(0) = 0, y(0) = 2, y’(0) = 0, y(0) = 3, y’(0) = 0, y(0) = -1,
y’(0) = 1, y(0) = -2, y’(0) = 1, pada gambar 2 dengan y(0) = 1, y’(0) = 0, y(0) = 2, y’(0) =
0, y(0) = 3, y’(0) = 0, y(0) = -1, y’(0) = 1, y(0) = -2, y’(0) = 1 . Untuk jarak nilai antara
BAB V PENUTUP
A. SIMPULAN
Dari uraian pada pembahasan di atas dapat disimpulkan
1. Garis besar langkah-langkah dalam metode Runge-Kutta orde keempat untuk
menentukan solusi persamaan diferensial nonlinier 2 2 dt d
θ
+ l g
sinθ = 0 adalah sebagai
berikut:
k1 = h/2 *f (x[n], y[n], yp[n])
K = h/2*( yp[n] + k1/2)
k2 = h/2*f(x[n] + h/2, y[n] + K, yp[n] + k1)
k3 = h/2*f(x[n] + h/2, y[n] + K, yp[n] + k2)
L = h*( yp[n] + k3)
k4 = h/2*f(x[n] + h, y[n] + L, yp[n] + 2*k3)
x[n + 1] = x[n] + h
y[n + 1] = y[n] + h*(yp[n] + 1/3*(k1 + k2 + k3)
yp[n + 1] = yp[n] + 1/3*(k1 + 2*k2 + 2*k3 + k4).
Dengan menerapkan metode Runge-Kutta orde keempat pada persamaan pendulum,
+ −
z
f
0 2cos( ) 2cos(1) 1 1
d f + x -
+ −
1
0 2cos( ) 2cos(1) 1 1
f d f
2. Dengan aplikasi program Maple untuk visualisasi persamaan pendulum diperoleh grafik lintasan untuk beberapa nilai y(0) dan y’(0). Dari grafik-grafik tersebut dapat dilihat
bahwa persamaan pendulum mempunyai karakteristik untuk beberapa nilai y(0) dan
y’(0). Untuk jarak nilai antara y(0) dan y’(0) kecil akan menghasilkan kurva yang
berbentuk gelombang yang teratur.
B. SARAN
1. Perlu diadakan pengkajian yang lebih mendalam mengenai penggunaan metode
Runge-Kutta untuk menentukan solusi persamaan pendulum khususnya dan diferensial nonlinier
pada umumnya, juga penerapannya pada masalah fisika dan teknik.
2. Perlu diadakan pengkajian lebih lanjut apakah metode Runge-Kutta bisa berlaku untuk
semua persamaan diferensial nonlinier.
3. Perlu diadakan pengkajian lebih lanjut mengenai metode-metode numerik lain selain
DAFTAR PUSTAKA
Edward B. Saff, R. Kent Nagle. Fundamentals of Diferential Equations and Boundary Value Problems. 1993. USA: Addison-Wesley Publishing Company.
Erwin Kreyzig. Matematika Teknik Lanjutan. 1993. Jakarta: PT. Gramedia.
J.C. Ault, M.Sc, Frank Ayres, JR, Ph.D. Persamaan Diferensial dalam Satuan SI metric. Jakarta: Erlangga.
Kartono. Maple untuk Persamaan Differensial. 2001. Yogyakarta: J&J Learniang.
Louis A. Pipes. Applied Mathematics for Engineers and Physicists. 1958. New York. McGraw-Hill Book Company, Inc.
N. Finizio, G. Ladas. Persamaan Diferensial Biasa dengan Penerapan Modern. 1988. Jakarta: Erlangga.
Raymond P. Canale, Steven C. Chapra. Metode Numerik Untuk Teknik Dengan Penerapan Pada Komputer Pribadi. 1991. Jakarta: Universitas Indonesia Press.
Shepley L. Ross. Differential Equations. 1989. New York: John and Wiley & Sons.
Wiliams E. Boyce, R. C. DiPrima. Elementary Differential Equations and Boundary Value Problems. 1992. New York: John and Wiley & Sons, Inc.
Pada metode raltson, k1 untuk interval pertama juga berharga 8,5 maka: k2 = - 2 (0,375)3 + 12 (0,375)2 – 20 (0,375) + 8,5 = 2,58203125
Slope rata-rata dihitung oleh:
φ =
(2,58203125) = 4,5546875
yang digunakan untuk memprediksikan:
Gambar 1.1 Perbandingan solusi sebenarnya dan solusi numerik dengan menggunakan
tiga buah metode RK orde kedua serta metode Euler
Metode Runge-Kutta orde ketiga untuk n = 3, suatu turunan yang serupa dengan
penurunan buat metode orde kedua dapat dilaksanakan. Hasil dari turunan ini adalah
enam persamaan dengan delapan yang tidak dikenal. Karena itu, harga-harga untuk dua
buah yang tidak dikenal tersebut harus dispesifikasikan sebelumnya agar dapat
menentukan parameter-parameter sisanya. Sebuah versi yang umum mamberikan hasil:
k6 = f(xi + h, yi - 7 3
hk1 + 7 2
hk2 + 7 12
hk3 -7 12
hk4 + 7 8
hk5 ) (3.6f)
B. Persamaan Pendulum ( Ayunan )
Sebagai contoh bandul sederhana atau persamaan ini sering disebut dengan
persamaan pendulum seperti gambar 1:
R
x
w y
Gambar 1 Sebuah diagram bebas dari bandul berayun memperlihatkan gaya-gaya pada
partikel serta percepatan.
Partikel dengan berat W tersebut digantungkan pada sebuah batang tanpa berat yang panjangnya l. Gaya yang bekerja pada partikel hanyalah beratnya serta tegangan R
pada batang. Posisi partikel pada sembarang waktu dinyatakan dengan lengkap dalam
BAB V PENUTUP
C. SIMPULAN
Dari uraian pada pembahasan di atas dapat disimpulkan
1. Garis besar langkah-langkah dalam metode Runge-Kutta orde keempat untuk
menentukan solusi persamaan diferensial nonlinier 2 2
diperoleh penyelesaian yaitu sebagai berikut:
2. Dengan aplikasi program Maple untuk visualisasi persamaan pendulum diperoleh grafik lintasan untuk beberapa nilai y(0) dan y’(0). Dari grafik-grafik tersebut dapat dilihat
bahwa persamaan pendulum mempunyai karakteristik untuk tiap-tiap nilai y(0) dan y’(0).
Untuk jarak nilai antara y(0) dan y’(0) kecil akan menghasilkan kurva yang berbentuk
gelombang yang teratur.
B. SARAN
1. Perlu diadakan pengkajian yang lebih mendalam mengenai penggunaan metode
Runge-Kutta untuk menentukan solusi persamaan pendulum khususnya dan diferensial nonlinier
pada umumnya, juga penerapannya pada masalah fisika dan teknik.
2. Perlu diadakan pengkajian lebih lanjut apakah metode Runge-Kutta bisa berlaku untuk
semua persamaan diferensial nonlinier.
3. Perlu diadakan pengkajian lebih lanjut mengenai metode-metode numerik lain selain
metode Runge-Kutta.
Edward B. Saff, R. Kent Nagle. Fundamentals of Diferential Equations and Boundary Value Problems. 1993. USA: Addison-Wesley Publishing Company.
Erwin Kreyzig. Matematika Teknik Lanjutan. 1993. Jakarta: PT. Gramedia.
J.C. Ault, M.Sc, Frank Ayres, JR, Ph.D. Persamaan Diferensial dalam Satuan SI metric. Jakarta: Erlangga.
Kartono. Maple untuk Persamaan Differensial. 2001. Yogyakarta: J&J Learniang.
Louis A. Pipes. Applied Mathematics for Engineers and Physicists. 1958. New York. McGraw-Hill Book Company, Inc.
N. Finizio, G. Ladas. Persamaan Diferensial Biasa dengan Penerapan Modern. 1988. Jakarta: Erlangga.
Raymond P. Canale, Steven C. Chapra. Metode Numerik Untuk Teknik Dengan Penerapan Pada Komputer Pribadi. 1991. Jakarta: Universitas Indonesia Press.
Shepley L. Ross. Differential Equations. 1989. New York: John and Wiley & Sons.
Wiliams E. Boyce, R. C. DiPrima. Elementary Differential Equations and Boundary Value Problems. 1992. New York: John and Wiley & Sons, Inc.
Lampiran 1
PRINT OUT MAPLE UNTUK SOLUSI PERSAMAAN PENDULUM > #Pers PENDULUM ORDE2
> with(plots):
Warning, the name changecoords has been redefined
> with(DEtools):
> pdb := diff(y(x),x$2)+k*sin((y(x)))=0;
:=
pdb + =
d d2
x2y( )x ksin(y( )x ) 0
> sol:= dsolve({pdb,y(0)=1,D(y)(0)=-1},y(x));
sol := y( )x = RootOf
> #solek:= subs(x=x[n],sol);
:=
> p3 :=plot({seq([x[n],y[n]],n=0..N)},x=0..10,style=point):
PRINT OUT MAPLE UNTUK SOLUSI PERSAMAAN PENDULUM
Dengan l d
= 2
> #Pers PENDULUM ORDE2
> restart:
> with(plots):
Warning, the name changecoords has been redefined
> pdb := diff(y(x),x$2)+2*sin((y(x)))=0;
> sol:= dsolve({pdb,y(0)=1,D(y)(0)=-1},y(x));
sol := y( )x =
> #solek:= subs(x=x[n],sol);
:=
> p3 :=plot({seq([x[n],y[n]],n=0..N)},x=0..10,style=point):
> > >
phaseportrait(diff(y(t),t$2)+2*sin((y(t)))=0,y(t),t=-10..10,[[y(0)=1,D(y)(0)=0],[y(0)=2,D(y)(0)=0],[y(0)=3,D(y)(0)=0]
Gambar 5 Phase portrait untuk y(0) = 1, y’(0) = 0, y(0) = 2, y’(0) = 0, y(0) = 3, y’(0) = 0, y(0) =
-1, y’(0) = 1, y(0) = -2, y’(0) = 1
>
DEplot(diff(y(x),x$2)+2*sin((y(x)))=0,y(x),x=-10..10,[[y(0)=1,D(y)(0)=0],[y(0)=2,D(y)(0)=0],[y(0)=3,D(y)(0)=0]
Gambar 6. deplot untuk y(0) = 1, y’(0) = 0, y(0) = 2, y’(0) = 0, y(0) = 3, y’(0) = 0, y(0) = -1,