Introduction to Probability
SECOND EDITION
Dimitri
P.
Bertsekas and John N. Tsitsiklis
Massachusetts Institute of TechnologyWWW site for book information and orders
http://www.athenasc.com
7
Markov Chains
Contents
7. 1 . Discrete-Time Markov Chains
7.2. Classification of States . . . .
7.3. Steady-State Behavior . . .
.7.4. Absorption Probabilities and Expected Time to Absorption
7.5. Continuous-Time Markov Chains
7.6. Summary and Discussion
Problems . . . .
·
p. 340
·p. 346
·p. 352
·p. 362
·p. 369
·p. 378
·p. 380
340 Markov Chains Chap. 7
The Bernoulli and Poisson processes studied in the preceding chapter are memo
ryless, in the sense that the future does not depend on the past : the occurrences
of new �:successes" or ':arrivals" do not depend on the past history of the process.
In this chapter, we consider processes where the future depends on and can be
predicted to some extent by what has happened in the past.
We emphasize models where the effect of the past on the future is sum
marized by a
state.
which changes over time according to given probabilities.
We restrict ourselves to models in which the state can only take a finite number
values and can change according to probabilities that do not depend on the time
of the change. We want to analyze the probabilistic properties of the sequence
of state values.
The range of applications of the type of models described in this chapter
is truly vast. It includes just about any dynamical system whose evolution over
time involves uncertainty, provided the state of the system is suitably defined.
Such systems arise in a broad variety of fields, such as. for example. commu
nications. automatic control, signal processing. manufacturing, economics. and
operations research.
7. 1
DISCRETE-TIME MARKOV CHAINS
We will first consider
discrete-time Markov chains,
in which the state changes
at certain discrete time instants, indexed by an integer variable
n .At each time
step
n,the state of the chain is denoted by
Xn .
and belongs to a
finite
set S of
possible states, called the
state space.
Without loss of generality, and unless
there is a statement to the contrary. we will assume that S
={ I,
..
..
m}
,for some
positive integer
m.The Markov chain is described in terms of its
transition
probabilities
Pij :whenever the state happens to be
i,
there is probability
Pijthat the next state is equal to
j .
:Mathematically.
Pij
=
P(Xn+l
=
j I
Xn
=i).
i.
j
ES.
The key assumption underlying Markov chains is that the transition probabilities
Pijapply whenever state
i
is visited, no matter what happened in the past, and
no matter how state
i
was reached. J\lathematically, we assume the
Markov
The transition probabilities
Pijmust be of course nonnegative, and sum to
one:
m
Sec. 7. 1 Discrete-Time Markov Chains 341
We will generally allow the probabilities
Pii
to be positive, in which case it is
possible for the next state to be the same
asthe current one. Even though the
state does not change, we still view this
asa state transition of a special type (a
"self-transition" ) .
Specification of Markov Models
•
A Markov chain model is specified by identifying:
(a) the set of states S
={I,
..
., m},
(b) the set of possible transitions, namely, those pairs
(i,
j) for which
Pij
> 0, and,
(c) the numerical values of those
Pij
that are positive.
•
The Markov chain specified by this model is a sequence of random
variables
XO, X1 , X2, .
. ., that take values in S, and which satisfy
P(Xn+1
=j
I Xn
=i,
Xn-l
=in-I , . . . , Xo
=io)
=Pij ,
for all times
n,all states i, j
ES, and all possible sequences
io,
. ..
, in- l
of earlier states.
All of the elements of a Markov chain model can be encoded in a
transition
probability matrix,
which is simply a two-dimensional array whose element
at the ith row and jth column is
Pij :
Pl l Pl2
Plm
P21 P22
P2m
Pml pm2
Pmm
It
is also helpful to lay out the model in the so-called
transition probability
graph,
whose nodes are the states and whose arcs are the possible transitions.
By recording the numerical values of
Pij
near the corresponding arcs, one can
visualize the entire model in a way that can make some of its major properties
readily apparent.
Example 7.1 . Alice is taking a probability class and in each week, she can be
either up-to-date or she may have fallen behind. If she is up-to-date in a given week, the probability that she will be up-to-date (or behind) in the next week is
Pi l
=0.8.
P12
=probability is
P21
=[�:� 0.4] '
graph is show n in 7. 1 .
7 . 1 : The transition
7
P22
=0.4,
in 7. 1 .
7 . 2 . A fly moves along
a
line i n u nitincrements. At t ime
p
eriod,it
moves
one unit to the left withp
robabiHty0.3,
one unit to the right with probability 0.3, and stays i n p lace with probabiHtyi
nd
epend
ent the
movements.
spiders are
at
positions 1 and m: if it is captured by a and the
terminates. We want to construct a Markov chain model, assuming that the fly starts in a position between 1 m.
us states 1 , 2 , . . . , m , with positions of the fly. The nonzero transition probabilities are
{
0.31
Pi] ::::::: 0.4,
Pu
::::::: 1 , pmm ::::::: I , if j = i - l or j = i+
1 ,if j = i, for i ::::::: 2 , . .. , m - 1 .
matrix are in
7.2: The t ransi tion probability and the transi tion
7.2, for the case where m = 4.
ma-7. 1
State 1 :
with
2:
Machine is
is
in
two states:
[
1 - b b]
.r 1 - r
1 b
7. 3: 1tansition
b
T broken
1 'r
for 7.3 .
7 . 4 : Transition probabi lity graph for t he second part of Exam ple 7.3. A
machine that has remained broken for e = 4 days is replaced by a new, working machine.
models. In
=
io,
Xl = il ,. . .
ITo verify t his property, note that
P(Xo = io , = il }
. . .
� Xn ==)
==
io, · . .
IXn- 1
== in - l, . . . � 1
== in- l
),
we have
apply
7
same argument to the term P(Xo == - 1 ) and continue similarly,
we eventually the state
Xo
isp (X 1 == i
1 ,
. . . • X n == I X 0==
io ) ==Graphically, a state sequence can be identified with a sequence of arcs in the
transition probability and the such a the
IS by of arcs
traversed by the
We
7.4. For I we
P ( Xo
=
2� Xl=
2.=
2 ,= 3, X4 = =
to a of is no
Sec. 7. 1 Discrete-Time Markov Chains 345 n-Step Transition Probabilities
Many Markov chain problems require the calculation of the probability law of
the state at some future time, conditioned on the current state. This probability
law is captured by the
n-step transition probabilities,defined by
Tij (n)
=P (Xn
j
I
Xo
=i).
In words,
Tij (n)
is the probability that the state after
n
time periods will be j,
given that the current state is
i.
It can be calculated using the following basic
recursion, known as the
Chapman-Kolmogorov equation.Chapman-Kolmogorov Equation for the n-Step Transition Probabilities
The n-step transition probabilities can be generated. by the recursive formula
m
T
ij
(n
)
=L
Tik(
n
- I)Pkj ,
k=l
starting with
for n
>
1 ,and all i, j,
To verify the formula, we apply the total probability theorem as follows:
m.
probability
Pkj
of reaching j at the next step.
We can view
Tij (n)
as the element at the ith row and jth column of a two
dimensional array, called the
n-step transition probability matrix.t
Fig
ures
7.6
and
7.7
give the n-step transition probabilities
Tij (n)
for the cases of
t Those readers familiar with matrix multiplication, may recognize that the
Chapman-Kolmogorov equation can be expressed
asfollows: the matrix of n-step tran
sition probabilities
TtJ
(n) is obtained by multiplying the matrix of (n - I)-step tran
sition probabilities
T
ik(n
- 1 ) ,with the one-step transition probability matrix. Thus,
7.5: Deriva.tion of the
at state j at time n is the sum of the
Chap. 7
probability T,k (n - l )Pkj of the different ways of j .
on
ity of being
rij (n)
7.6, we see
this l imit does not depend Furthermore, the probability initial state i n is but over time this
(but by no means all)
a
7.7, we see a qualitatively different behavior: (n)
on the initial can zero for states. Here, we that are "absorbing," sense that they are infinitely
once are states 1 4 to
capture of the fly by one of the two spiders. Given enough time: it is certain that some absorbing state will Accordingly: probability of being at the
2
a
we start to that These examples
CLASSIFICATION STATES
are
this is the subject of the
some
some
7.6: n-step transition probabi lities for the "up-to-date/behind" Exam-ple 7. 1 . Observe that as n (n) converges to a limit that does not depend on the initial state i .
once, are not be the case. which this occurs .
t o b e visited again, while In this section, we focus on the
we wish to classify
of a Markov chain with a focus on the freq uency with which are
As a a us
that a state
j
is from a state i if for some the n-step transitionprobability Tij
(n)
, if is positive probability of j , starting fromi,
after some of time periods.An
definition
is t hat is a possible 1-, 1 1 1 . ..
, hj,
starts at imore
(i, id , (il ,
, in-l ), (in- l , j)
Let
A( i)
be the set of are accessible from i. We if for j that is from i, i is alsoall j belong to
A(i)
we i toA(j).
i, we can only visit states j E
i
and, given enough ir aan infinite number times.
version of argument .
)
is it is to
end-of-chapter problems for a
:L ;3 <\
o
7.7: shows n-step transit ion probabilities
7.2. These are the of
reach-from state i. We observe t hat probabilit ies converge to a limit, hut the l i m i t on the state. I n this
note t hat the Ti 2 (n) and Tz3 (n) of
2 or 3\ go to zero! as n i ncreases .
if is a state j E
AU)
t
hat i is from j .7
state i . there is positive that the state enters such a j . Given enough this win happen, and i cannot be after that . Thus, a transient
state will
only
be visited a finite number seethe
or rec
u
rrence is arcs of tran-[
th
osep
airs (i, wh
ichPij
>0]
and not the7.8 provides an example of a transition
prob-a recurrent stprob-ate, the set are �
form
a
(orsimply
that states
in A (i) are all
from no state A ( i ) is from t
h
em.lvlathematically, for a recurrent state i, we have A ( i ) = A (j ) for all j that belong
to
A( i) !
as can seen from recurrence. Inof 7.8, sta
t
es 3 a class, and st
ate 1 itself also forms a7. 2 of
gIven
7.8: Classification of states given the t ransition probabi lity S
tart-from state I , the accessible state is itself. and so 1 is a recu rrent state.
States 1 . 3, and 4 are accessible from 2. but 2 is not accessihle from an:v' of them,
so state 2 is transient . States 3 and 4 are accessible from each other . and are both recurrent .
probleIn . It follow::; that must exist at one recurrent
at one elM!:). the fonowing conclusion.
• A Markov can be decomposed into one or more recurrent classes,
•
•
•
possibly some states.
recurrent state is
is not
states
possibly state.
recurrent states are
7.9 �,Iarkov
1S
from
aprovides a powerful concept ual tool for reasoning about I\.farkov chains of
Hnmber of times:
For the
purpose ofbehavior of
it
isiIn-to analyze chains that consist of a recurrent class. For the
it is t o
particul
a
r class o f recurrentstates is
enteredgiven transient state. These two issues. and
1.9: of l\·farkov chain into recurrent classes and transient states.
if 1- > 1 .
is
if k
=
1 . . . . . di f k =
1 .
7.2
Figure 7. 10: Structure of a periodic recurrent class. I n t his example . d = 3.
Thus. in a periodic recurrent
in order,
d
recurrent
we nlove through the sequence
in the same s ubset
.
As an example,7.9 1 2) is
the same is true of the class third chain of Fig.
All
ot herreason is that from i . n .
The
a way to verify aperiodicity of a recurrent whether
there a special n � 1 and a special i E R from which all states
in
Rcan (n) >
0
for an j E an considerthe first chain in from state I I every state is possi ble at time
n = 3, SO unique recurrent of t hat is
A converse
a recurrent
for 'l
•
(
or to S 1 if k =d).
R.
turns out to be true: if n
such
Tij (n)
>0
be grouped in d
from to
1
• The class is if and only if a
352 Markov Chains Chap. 7
7.3 STEADY-STATE BEHAVIOR
In Markov chain models, we are often interested in long-term state occupancy
behavior, that is, in the n-step transition probabilities
Tij (n)when n is very
large. We have seen in the example of Fig.
7.6
that the
Tij (n)may converge
to steady-state values that are independent of the initial state. We wish to
understand the extent to which this behavior is typical.
If there are two or more classes of recurrent states, it is clear that the
limiting values of the
Tij (n)must depend on the initial state
(
the possibility of
visiting
j
far into the future depends on whether
j
is in the same class as the
initial state
i).
We will, therefore, restrict attention to chains involving a single
recurrent class, plus possibly some transient states. This is not as restrictive
as it may seem, since we know that once the state enters a particular recurrent
class, it will stay within that class. Thus, the asymptotic behavior of a multiclass
chain can be understood in terms of the asymptotic behavior of a single-class
chain.
Even for chains with a single recurrent class, the
Tij (n)may fail to converge.
To see this, consider a recurrent class with two states,
1and 2, such that from
state
1we can only go to 2, and from 2 we can only go to
1 (P12=
P21 = 1 ).Then,
starting at some state, we will be in that same state after any even number of
transitions, and in the other state after any odd number of transitions. Formally,
Tii (n) =
{
1,j
approaches a limiting value that is independent of the initial state
i,
provided
we exclude the two situations discussed above
(
multiple recurrent classes and
/
or
a periodic class
)
. This limiting value, denoted by
7r j ,has the interpretation
7rj �
P(Xn
=j),
when n is large,
and is called the
steady-state probability of j.
The following is an important
theorem. Its proof is quite complicated and is outlined together with several
other proofs in the end-of-chapter problems.
Steady-State Convergence Theorem
Consider
a Markov chain witha
single recurrent class, which isaper
iod
ic.Sec. 7.3 Steady-State Behavior
(a) For each j, we have
lim
Tij (n)
=1r'j ,
n-oo
for all
i.
(b) The
1r'j
are the unique solution to the system of equations below:
(c) We have
The steady-state probabilities
1l'j
sum to
1and form a probability distri
bution on the state space, called the
stationary distribution
of the chain.
The reason for the qualification "stationary" is that if the initial state is chosen
according to this distribution, i.e.! if
P(Xo
=j)
1l'j .
j
= 1 , .. . , m,then, using the total probability theorem, we have
m m
P(XI
=j )
L
P(Xo
=k)Pkj
=L
1l'kPkj
=1l'j ,
k=l
k=l
where the last equality follows from part (b) of the steady-state convergence
theorem. Similarly, we obtain
P(Xn
j)
=1l'j ,
for all n and j . Thus, if the
initial state is chosen according to the stationary distribution, the state at any
future time will have the same distribution.
The equations
m
1l'j
L
1l'kPkj ,
j
= 1 , . . . , m,k=l
are called the
balance equations.
They are a simple consequence of part (a)
of the theorem and the Chapman-Kolmogorov equation. Indeed, once the con
vergence of
Tij (n)
to some
1l' j
is taken for granted, we can consider the equation,
m
354 Markov Chains Chap. 7
the balance equations can be solved to obtain the
7rj .
The following examples
illustrate the solution process.
Example
7.5. Consider a two-state Markov chain with transition probabilitiesPI I =
0.8,
This is a generic property, and in fact it can be shown that any one of the balance equations can always be derived from the remaining equations. However, we also know that the 7rj satisfy the normalization equation
7rl
+
7r2 =1,
which supplements the balance equations and suffices to determine the 7rj uniquely. Indeed, by substituting the equation 7rl = 37r2 into the equation 7rl
+
7r2 = 1 , we obtain 37r2+
7r2 = 1 , or7r2 =
0.25,
which using the equation 7rt
+
7r2 = 1 , yields7rl =
0.75.
This is consistent with what we found earlier by iterating the Chapman-Kolmogorov equation (cf. Fig.
7.6).
so
1. 1 1 : Transition
1f) =
( 1
1
355
wet
states:
1 , 2 .
for 7.6.
0 < p <
1)
are
+
p1r2 , 1f2 = 1fo + ptrl .1
1fo 1f t = -- ,
I1 J 1' ,j DonI' 3
Door .J
7,,12: Transition in for the case of
m = 5 doors. that 0 < p < 1 1 it is not initial every state j can be reached in
to see t hat an and t herefore the
on some
m states:
i, i = 1, .
.
. , m.o
I - p
o
p
1fl = ( 1
-p
0 0o
p
0 1 p O po o 0
7T1 = p1f'i- l
+ (1
7T
Tn. = + p1f'Tn. 1 .is
o o o
I - p 1
-o o
o
1, = . . • , m - 1 ,
once we
7.
7
Sec. 7.3 Steady-State Behavior 357
should have the same steady-state probability. This suggests the solution
j = 1 , . . . , m.
Indeed, we see that these 'Trj satisfy the balance equations as well as the normal ization equation, so they must be the desired steady-state probabilities (by the uniqueness part of the steady-state convergence theorem) .
Note that i f either
p =
0 orp =
1 , the chain still has a single recurrent class but is periodic. In this case, the n-step transition probabilities Tij (n) do not converge to a limit, because the doors are used in a cyclic order. Similarly, if m is even, the recurrent class of the chain is periodic, since the states can be grouped into two subsets, the even and the odd numbered states, such that from each subset one can only go to the other subset.Long-Term Frequency Interpretations
Probabilities are often interpreted as relative frequencies in an infinitely long
string of independent trials. The steady-state probabilities of a Markov chain
admit a similar interpretation, despite the absence of independence.
Consider, for example, a Markov chain involving a machine, which at the
end of any day can be in one of two states, working or broken down. Each time
it breaks down, it is immediately repaired at a cost of
$ 1 .
How are we to model
the long-term expected cost of repair per day? One possibility is to view it as the
expected value of the repair cost on a randomly chosen day far into the future;
this is just the steady-state probability of the broken down state. Alternatively,
we can calculate the total expected repair cost in
n
days, where
n
is very large,
and divide it by
n.
Intuition suggests that these two methods of calculation
should give the same result. Theory supports this intuition, and in general we
have the following interpretation of steady-state probabilities (a justification is
given in the end-of-chapter problems) .
Steady-State Probabilities
asExpected State Frequencies
For a Markov chain with a single class which is aperiodic, the steady-state
probabilities
7r j
satisfy
1.
Vij(n)
7rj
=1m
,
n--+oo n
where
Vij
(n)is the expected value of the number of visits to state j within
the first
ntransitions, starting from state
i.
be
from j as the long-term fraction of transitions
Chap. 7
move the
Expected of a Particu1ar Transition
lim
n - oo n
with a single class which is
(n)
k.
the frequency interpretation of 7r j equation
m
k= l
has an intuitive meaning.
It
expresses the fact that the expected frequency 7fjof to j sum the 1rkPkj of
of the balance in terms of In
a very nu mber of transitions, we expect a fraction 1TkPkj that bring t he state
from k to j. (This also to transitions from j to which occur with
.) The sum of the expected of such transitions is the
of at state j.
t I n fact , some stronger statements are also true, such as the following. Whenever
we carry out a probabilistic experiment and a trajectory of the Markov chain state j is t he observed long-term transitions
Even though the trajectory is random,
which
a
intro-duces some generic notation for the transition probabilit ies
.
In particular,l = i + l l
l = i - l l
( "birth" probability at
(
probability at7.14: Transition probability graph for a birth-death process.
i) ,
i) .
'i. to i 1 can occur. Therefore,
the from
i
to the expected frequency of transitions to
i 1 , is 1ribi , i + 1 to i, which is
1 ,
i
== 0, 1 , . . . , m-
1 .Using the local ba] ance equations, we
1
from which , using probabilities tri are
the normalization computed.
t A more formal that
i
==1, . . .
, m .not on the
as follows. The balance at state
0
is7To(
1
-bo)
+
7TI
d1=
11"0 , which = 7T}is
11"obo
+ 11"1 ( 1 - - dJ ) + = 11"1 .the local balance equation 11"obo == 11"1 d1 at the previous this is rewritten as
+
7Tl
( 1- bi -
) + ==7Tl ,
which simplifies to7TIbl
== We can then7
1
- b.
1\ 2\ . . .
, m , but if 0 (or m + 1 ) , is i nstantly reftected back to position 1 (or position m, respectively) . Equivalently, wemay assume that when the person is in will stay in that position
1
- b
b,
achain model whose states are the positions I ! . . . ! m . The transi tion probability
of the chain is give n in 7. 15.
l - b l - h
7 . 1 5 : Transition probability for the random walk 7.8.
The local balance equations are
1ri + l = p1r"
we can express
using
theleads to
i = l. .
..
, m - l .b
p =
I - b '
"ITj i n terms 11" 1 � as
i - I
1f i = P 1rl · i = 1 .
. .
.. m .I = 11"1 + . . . + 11"
TTI.
' we( m - l
)
1 = 11' 1 1 + P + . . . + P
11"1 =
if P = 1 are equally likely) ,
at a a
"IT, = 1 'l .
in a buffer then transmitted. The storage capacity of
i f m packets are already present, newly
at most one event can
we assume following occurs:
(
a) one new(b)
oneo otherwise;
(
c) no new nohappens with probability
1 - b - dif
and with
probability
1-
b
ot herwise.at one
a
b
>0;
We introduce a rvlarkov with states
0,
1 . . . . , m, corresponding to theof in the buffer. The graph is i n
1 - fJ - (/ 1 - II
d
7 . 1 6 : Transition in
The local balance equations are
i = 0, 1 , . . . , TIn
-
1 .b
p =
; 1'
and obt ai n 11"i+ 1 = P11"i , which leads to
i = O, I , . . . ! m.
l - d
d
7.9.
1 =
7ro +
7rl + ' . . + 1i"m , weand
7ro
={
1-
.
m +
I 'Using the equation 1T'i = pl 7rO , the
if P
t- 1,
if p t- 1 ,
i f p = 1 .
probabilities are
362 Markov Chajns Chap. 7
It is interesting to consider what happens when the buffer size
mis so large
that it can be considered as practically infinite. We distinguish two cases.
(
a
)
Suppose that
b <
d,or
p<
1.
In this case, arrivals of new packets are
less likely than departures of existing packets. This prevents the number
of packets in the buffer from growing, and the steady-state probabilities
1i'idecrease with
i,as in a
(
truncated
)
geometric PMF. We observe that as
m -t 00 ,
we have
1
-pm+ l -t1,
and
for all
i.
We can view these as the steady-state probabilities in a system with an infinite
buffer.
[
As a check, note that we have
2::'0
pi( l - p) =1 .]
(
b
)
Suppose that
b
>d, or
p >1 .
In this case, arrivals of new packets are more
likely than departures of existing packets. The number of packets in the buffer
tends to increase, and the steady-state probabilities
1i'iincrease with
i.As we
consider larger and larger buffer sizes
m,the steady-state probability of any
fixed state
idecreases to zero:
for all
i.
Were we to consider a system with an infinite buffer, we would have a Markov
chain with a countably infinite number of states. Although we do not have
the machinery to study such chains, the preceding calculation suggests that
every state will have zero steady-state probability and will be "transient." The
number of packets in queue will generally grow to infinity, and any particular
state will be visited only a finite number of times.
The preceding analysis provides a glimpse into the character of Markov chains
with an infinite number of states. In such chains, even if there is a single and
aperiodic recurrent class, the chain may never reach steady-state and a steady
state distribution may not exist.
7.4 ABSORPTION PROBABILITIES AND EXPECTED TIME TO ABSORPTION
In this section, we study the short-term behavior of Markov chains. We first
consider the case where the Markov chain starts at a transient state. We are
interested in the first recurrent state to be entered, as well as in the time until
this happens.
When addressing such questions, the subsequent behavior of the Markov
chain (after a recurrent state is encountered) is immaterial. We can therefore
focus on the case where every recurrent state k is
absorbing,Le. ,
Pkk
=1 ,
Pkj
=
0 for all j i= k .
Sec. 7.4 Absorption Probabilities and Expected Time to Absorption 363
reached with probability 1, starting from any initial state. If there are multiple
absorbing states, the probability that one of them will be eventually reached is
still 1, but the identity of the absorbing state to be entered is random and the
associated probabilities may depend on the starting state. In the sequel, we fix a
particular absorbing state, denoted by
s,and consider the absorption probability
ai
that
sis eventually reached, starting from
i:
ai = P(Xn
eventually becomes equal to the absorbing state
sI
Xo =
i).
Absorption probabilities can be obtained by solving a system of linear equations,
as indicated below.
Absorption Probability Equations
Consider a Markov chain where each state is either transient or absorb
ing, and
fix
a particular absorbing state
s.Then, the probabilities
aiof
eventually reaching state
s,starting from
i,
are the unique solution to the
equations
from the definitions. To verify the remaining equations, we argue as follows. Let
us consider a transient state
i
and let
A
be the event that state
sis eventually
The uniqueness property of the solution to the absorption probability equations
requires a separate argument, which is given in the end-of-chapter problems.
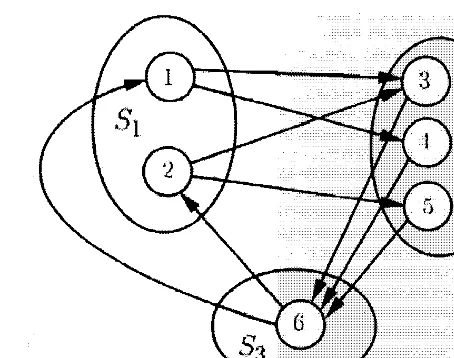
7. 1 7: ( a) Transition probabil i ty graph i n Exam ple 7 . 1 0 . ( b) A new graph in wh ich states 4 and 5 have been lumped i nto t he absorbing state 6.
7
state 6, starting from t he transient
states
2
+ OAa3 + O.
+
the facts a l = 0 and a6 = 1 , we
+ + 1 .
a3 = 0 . 2a2 + 0.8.
This is a system of two equations in the two unknowns a2 and a3 . which can be readily solved to yield a2 = 2 1 /3 1 a3 = 29/3 1 .
1
probability
P,
andExpected to A bsorption
independent. The gambler plays continuously until he either accumulates a
tar-the gambler's
correspond to
An states are
absorbi ng. Thus, the problem amounts to find i ng
= m
at each one of these two absorbing states. Of course, these absorption probabilities on state i.
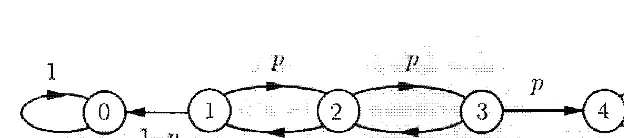
Figure 1. 1 8 : Transition probability graph for t he gambler's ruin problem
7. 1 1). Here m = 4 .
Let us set s = m i n which case the absorption probability Q 1 is the probability
state i . satisfy
ao = 0 ,
at
=(1
-p)ai-l
+
pai+l ,
i = l , ... ) m - l ,am
= 1 .These equat ions can be solved in a variety of ways. It turns out t here is an elegant
Then, by denoting
and
the equations are as
from which we obtain
p =
i = l , .. . , m - l .
i = 0, .. . , 'm - 1,
p
i = l , . . . , m - l .
366 Markov Chains Chap. 7 unfavorable odds, financial ruin is almost certain.
Expected Time to Absorption
We now turn our attention to the expected number of steps until a recurrent
state is entered (an event that we refer to
as"absorption" ) , starting from a
particular transient state. For any state
i,
we denote
J.Li
=E [
number of transi tions until absorption, starting from
i]
=E[
min{n
> 0I
Xn
is recurrent}
I
Xo
=i] .
Note that if
i
is recurrent, then
J.Li =
0
according to this definition.
7. 4 to 367
The to J.L l , • . . , J.Lm , are uniq ue solution to
the equations
= 0, all
m
== 1 + for all transient states i.
7 . 1 2 .
ample 7.2 . This corresponds to the Ivlarkov chain shown in Fig. 7. The states to
to possible positions, the absorbing states
1
and m correspondJ..L2 = 1 +
of
- I + + I .
+ J..L3 = 1 +
fly is
1. = . . . . m - I .
+
112 =
(1
+ ( 1 we cansecond equation and solve for J13 . We obtain J..L3 = 1 0/3 and by substitution again .
J..L2 = 10/3.
7 . 1 9 : Transition in Example 7. 12.
The to can
368 Markov Chains Chap. 7
from any other state. For simplicity, we consider a Markov chain with a single
recurrent class. We focus on a special recurrent state
s,and we denote by
tithe
mean first passage time from state
i
to state
s,defined by
ti =
E
[
number of transitions to reach
sfor the first time, starting from
i]
=
E
[
min
{n > 0 I
X
n = s}
I
X
0 =i] .
The transitions out of state
sare irrelevant to the calculation of the mean
first passage times. We may thus consider a new Markov chain which is identical
to the original, except that the special state
sis converted into an absorbing
state (by setting
pss =1 , and
P
sj
=0
for all j f:.
s)
.With this transformation,
all states other than
sbecome transient. We then compute
ti
as the expected
number of steps to absorption starting from
i,
using the formulas given earlier
in this section. We have
unique solution (see the end-of-chapter problems).
The above equations give the expected time to reach the special state
sstarting from any other state. We may also want to calculate the
mean recur
rence time
of the special state
s,which is defined as
with probability
Psj .
We then apply the total expectation theorem.
Example 7.13. Consider the "up-to-date" - "behind" model of Example 7 . 1 . States
Sec. 7.5 Continuous-Time Markov Chains 369
Let us focus on state s =
1
and calculate the mean first passage time to state1.
starting from state2.
We havetl
=0
andfrom which
t2
=1
+
P21it
+
P22t2
=1
+
0.4t2.
1
5t2
= -0.6
= - . 3The mean recurrence time to state
1
is given by* 5
4
tl
=l + Plltl + P12t2
=
1 + 0 + 0.2 ·
3
=3'
Equations for Mean First Passage and Recurrence Times
Consider a Markov chain with a single recurrent class, and let
sbe a par
ticular recurrent state.
•
The mean first passage times
ti
to reach state
sstarting from
i,
are
the unique solution to the system of equations
ts
=0,
m
ti
=1 +
L
Pijtj ,
j=l
for all
i
=1=
s.•
The mean recurrence time
t;
of state
sis given by
m
t;
=1 +
L
Psjtj .
j=1
7.5 CONTINUOUS-TIME MARKOV CHAINS
In the Markov chain models that we have con�idered so far. we have assumed
that the transitions between states take unit time. In this section. we consider a
related class of models that evolve in continuous time and can be used to study
systems involving continuous-time arrival proce�ses. Example� are distribution
centers or nodes in communication networks where some event� of interest (e.g ..
arrivals of orders or of new calls) are de�cribed in terms of Poi�son proce�se�.
370 Markov Chains Chap. 7
To describe the process, we introduce certain random variables of interest:
Xn :
the state right after the nth transition;
Yn :
the time of the nth transition:
Tn :
the time elapsed between the (n - l)st and the nth transition.
For completeness, we denote by
Xo
the initial state, and we let
Yo
= O.We also
introduce some assumptions.
Continuous-Time Markov Chain Assumptions
•
If the current state is
i,
the time until the next transition is exponen
tially distributed with a given parameter Vi , independent of the past
history of the process and of the next state .
•
If the current state is
i,
the next state will be j with a given probability
Pij ,
independent of the past history of the process and of the time until
the next transition.
The above assumptions are a complete description of the process and pro
vide an unambiguous method for simulating it: given that we just entered state
i,
we remain at state
i
for a time that is exponentially distributed with parameter
Vi,
and then move to a next state j according to the transition probabilities
Pij .
As an immediate consequence. the sequence of states
Xn
obtained after succes
sive transitions is a discrete-time Markov chain, with transition probabilities
Pij ,
called the
embedded
Markov chain. In mathematical terms, our assumptions
can be formulated as follows. Let
A
=
{TI =tl , . . . , Tn
=
tn, Xo
=
io, . . . . Xn-l
=in-I , Xn
=i}
be an event that captures the history of the process until the nth transition. We
then have
P(Xn+l
=j,
Tn+l
�t I A)
=P(Xn+1
=j,
Tn+l
�t I Xn
=i)
=
P(Xn+1
=j
I Xn
=i) P(Tn+1
�t I Xn
=i)
for all
t
� O.The expected time to the next transition is
Sec. 7. 5 Continuous-Time Markov Chains 371
transition rates
qij ,
one can obtain the transition rates
Vi
using the formula
m
Vi
=L
qij ,
j=l
and the transition probabilities using the formula
qij
Pi}
= - .Vi
Note that the model allows for self-transitions, from a state back to itself,
which can indeed happen if a self-transition probability
Pii
is nonzero. However,
such self-transitions have no observable effects: because of the memorylessness
of the exponential distribution, the remaining time until the next transition is
the same, irrespective of whether a self-transition just occurred or not. For this
reason, we can ignore self-transitions and we will henceforth assume that
Pii
=qii
=0,
for all
i.
Example 7.14. A machine, once in production mode, operates continuously until
an alarm signal is generated. The time up to the alarm signal is an exponential random variable with parameter 1 . Subsequent to the alarm signal, the machine is tested for an exponentially distributed amount of time with parameter 5. The test results are positive, with probability 1 /2, in which case the machine returns to pro duction mode, or negative, with probability 1 /2, in which case the machine is taken for repair. The duration of the repair is exponentially distributed with parameter
3.
We assume that the above mentioned random variables are all independent and also independent of the test results.Let states 1 , 2, and
3,
correspond to production mode, testing, and repair, respectively. The transition rates are VI=
1 , V2=
5, and V3 =3.
The transitionprobabilities and the transition rates are given by the following two matrices:
7
7.20: of the Ivlarkov chai n i n 7. 1 4 . The indicated next to each arc are the transition rates qij '
We finally 1v1arkov property
of t he
state
a
process [the random X
(t) the state of a
present
X
(
T)
for T >t],
isfor T <
t] .
We now elaborate on the relation between a continuous-time Ivlarkov and
a corresponding version . will to an
description of a continuous-time Markov chai n , t o a set of equations
Zn ==
X(n8),
n == O. l , . . ..
(the
Ivlarkov property of to describe the transition probabilities of Zn.
i s a probability
(n
+1 )8,
t
a transition at timet,
notationX(t)
is A commonconvention is to let X (t) refer to the state right after the transition , so that (Yn ) is
Sec. 7.5 Continuous-Time Markov Chains 373
further probability
Pij
that the next state is
j.
Therefore,
Pij
=P(Zn+l
=j I
Zn
=i)
=ViPij6
+0(6)
=qij6
+0(6),
if
j =1= i,
This gives rise to the following alternative description.
t
Alternative Description of a Continuous-Time Markov Chain
Given the current state
i
of a continuous-time Markov chain, and for any
j =1=
i,
the state
6time units later is equal to j with probability
independent of the past history of the process.
Example 7. 14 (continued) . Neglecting 0(8) terms, the transition probability
matrix for the corresponding discrete-time Markov chain
Zn
is[1-
8Example 7.15. Queueing. Packets arrive at a node of a communication network
according to a Poisson process with rate A. The packets are stored at a buffer with room for up to m packets, and are then transmitted one at a time. However, if a
packet finds a full buffer upon arrival, it is discarded. The time required to transmit a packet is exponentially distributed with parameter JJ. The transmission times of different packets are independent and are also independent from all the interarrival times.
We will model this system using a continuous-time Markov chain with state X(t) equal to the number of packets in the system at time t [if X (t) > 0, then t Our argument so far shows that a continuous-time Markov chain satisfies this alternative description. Conversely, it can be shown that if we start with this alter native description, the time until a transition out of state
i
is an exponential random variable with parameter Vi =Ej
qij .
Furthermore, given that such a transition hasjust occurred, the next state is j with probability
qij
/ Vi =Pij.
This establishes thatMarkov Chains Chap. 7
X(t)
- 1 packets are waiting in the queue and one packet is under transmission] .state by one a new packet by one
an existing packet departs. To s how that X (t) is i ndeed a Markov chain, we verify
we have in the and at the
same rates qij .
Consider the case where the is empty, the state
X (t)
is equalto O. A transition out state 0 can only occur if there is a new which
case state to 1 . are we
and
(X(t
+8)
= 1 1(t)
=0)
= At5 +{AI
if j = l ,qOj =
0,Consider next the case where t he system is fun, i
.
e. \ t he stateX (t)
isto m . A transition out of state m will occur upon the completion of the current
at state m
-
l . theof a transmission is exponential (and in particular, memory less) , we
(t +
6) = m - 1 I (t) = = p.6 + 0(6) ,=
{ �:
if j=
m - 1 ,case X (t) is to some state i ,
with 0 < i < m . During next £5 time units, t here i s a probability .x8 + 0(8) of a new packet arrival, which will bring t he state to i + 1 , and a probability J..L8
+
0(8)a state to
i
- l .probability of an of [, is of
the of 62 case with other 0(8) terms.]
see
(
X(t +
8) = i - I IX
(t) =i)
= JL8 + o(8) !+ 8) =
i +
1 1 (t) =i
)
= +if j = i + 1 ,
i f j = i - I ,
"
..
"7 . 2 1 : Transition
i = 1 , 2,
.
..
, m - l ;Sec. 7.5 Continuous-Time Markov Chains 375
Steady-State Behavior
We now turn our attention to the long-term behavior of a continuous-time
Markov chain and focus on the state occupancy probabilities
P(X(t)
=i),
in
the limit as
t
gets large. We approach this problem by studying the steady-state
probabilities of the corresponding discrete-time chain
Zn.
Since
Zn =
X(n8),
it is clear that the limit
'Trj
of
P(Zn
= j I
Zo =
i),
if it exists, is the same as the limit of
P(X(t) =
j
I
X(O) =
i).
It therefore
suffices to consider the steady-state probabilities associated with
Zn.
Reasoning
as in the discrete-time case, we see that for the steady-state probabilities to be
independent of the initial state, we need the chain
Zn
to have a single recurrent
class, which we will henceforth assume. We also note that the Markov chain
Zn
is automatically aperiodic. This is because the self-transition probabilities are
of the form
Pii
=
1 -
8 L qij
+
0(8):
j:j:.i
which is positive when
8
is small, and because chains with nonzero self-transition
probabilities are always aperiodic.
or
The balance equations for the chain
Zn
are of the form
mWe cancel out the term
'Trj
that appears on both sides of the equation, divide by
8,
and take the limit as
8
decreases to zero, to obtain the
balance equations
We can now invoke the Steady-State Convergence Theorem for the chain
Zn
to
obtain the following.
Steady-State Convergence Theorem
376 Markov Chains Chap. 7
(a) For each j, we have
lim
p(X(t)
=j
I
X(O)
=i)
='lrj,
t-oo
for all
i.
(b) The 'lrj are the unique solution to the system of equations below:
(c) We have
'lrj
=0,
'lrj
> 0,
j
=1 ,
. . . , m,for all transient states j,
for all recurrent states j .
To interpret the balance equations, we view
'lrj
asthe expected long-term
fraction of time the process spends in state j. It follows that
'lrkqkj
can be
viewed
asthe expected frequency of transitions from
kto j (expected number
of transitions from
kto j per unit time) . It is seen therefore that the balance
equations express the intuitive fact that the frequency of transitions out of state
j (the left-hand side term
'lrj Lk,cj qjk)
is equal to the frequency of transitions
into state j (the right-hand side term
Lk,cj 7rkqkj).
Example 7.14 (continued) . The balance and normalization equations for this
example are
1 = 71"1 + 71"2
+
71"3.As in the discrete-time case, one of these equations is redundant, e.g. , the third equation can be obtained from the first two. Still. there is a unique solution:
30 6
71"1 = 41 ' 71"2 = 4 1 '
Thus, for example, if we let the process run for a long time, X{t) will be at state 1 with probability 30/41 , independent of the initial state.
The steady-state probabilities 7I"j are to be distinguished from the steady
Sec. 7.5 Continuous-Time Markov Chains run for a long time, the expected fraction of transitions that lead to state 1 is equal to 2/5. steady-state probabilities
(1I"j
and1i'j)
are generically different. The main exception arises in the special case where the transition rates Vi are the same for all i; see the end-of-chapter problems.Birth-Death Processes
As in the discrete-time case, the states in a
birth-death process
are linearly
arranged and transitions can only occur to a neighboring state, or else leave the
state unchanged; formally, we have
qij
=0,
for
Ii
-j
I
>
1.
In a birth-death process, the long-term expected frequencies of transitions from
i
to j and of transitions from j to
i
must be the same, leading to the
local
balance equations
for all
i,
j.
The local balance equations have the same structure as in the discrete-time case,
leading to closed-form formulas for the steady-state probabilities.
Example 7.15 (continued) . The local balance equations take the form
378 Markov Chains Chap. 7
7.6 SUMMARY AND DISCUSSION
In this chapter, we have introduced Markov chain models with a finite number
of states. In a discrete-time Markov chain, transitions occur at integer times
according to given transition probabilities
Pij 'The crucial property that dis
tinguishes Markov chains from general random processes is that the transition
probabilities
Pijapply each time that the state is equal to
i,
independent of the
previous values of the state. Thus, given the present, the future of the process
is independent of the past.
Coming up with a suitable Markov chain model of a given physical situ
ation is to some extent an art. In general, we need to introduce a rich enough
set of states so that the current state summarizes whatever information from
the history of the process is relevant to its future evolution. Subject to this
requirement, we usually aim at a model that does not involve more states than
necessary.
Given a Markov chain model, there are several questions of interest.
(a) Questions referring to the statistics of the process over a finite time horizon.
We have seen that we can calculate the probability that the process follows a
particular path by multiplying the transition probabilities along the path.
The probability of a more general event can be obtained by adding the
probabilities of the various paths that lead to the occurrence of the event.
In some cases, we can exploit the Markov property to avoid listing each and
every path that corresponds to a particular event. A prominent example
is the recursive calculation of the n-step transition probabilities, using the
Chapman-Kolmogorov equations.
(b) Questions referring to the steady-state behavior of the Markov chain. To
address such questions, we classified the states of a Markov chain as tran
sient and recurrent. We discussed how the recurrent states can be divided
into disjoint recurrent classes, so that each state in a recurrent class is ac
cessible from every other state in the same class. We also distinguished
between periodic and aperiodic recurrent classes. The central result of
Markov chain theory is that if a chain consists of a single aperiodic recur
rent class, plus possibly some transient states, the probability Tij (n) that
the state is equal to some j converges, as time goes to infinity, to a steady
state probability
7rj ,
which does not depend on the initial state
i.
In other
words, the identity of the initial state has no bearing on the statistics of
Xn
when n is very large. The steady-state probabilities can be found by
solving a system of linear equations, consisting of the balance equations
and the normalization equation
Ej 7rj
=1.
Sec. 7.6 Summary and Discussion 379
class
)
. In both cases, we showed that the quantities of interest can be found
by considering the unique solution to a system of linear equations.
380 Markov Chains Chap. 7
P R O B L E M S
SECTION 7.1. Discrete-Time Markov Chains
Problem 1 . The times between successive customer arrivals at a facility are inde
pendent and identically distributed random variables with the following PMF:
{ 0.2,
Construct a four-state Markov chain model that describes the arrival process. In this model, one of the states should correspond to the times when an arrival occurs.
Problem 2. A mouse moves along a tiled corridor with 2m tiles, where m > 1. From
as in Fig. 7.2. and assume that the process starts at any of the four states, with equal probability. Let Yn = 1 whenever the Markov chain is at state 1 or 2, and Yn = 2 whenever the Markov chain is at state 3 or 4. Is the process Yn a Markov chain?
SECTION 7.2. Classification of States
Problem 4. A spider and a fly move along a straight line in unit increments. The
spider always moves towards the fly by one unit. The fly moves towards the spider by one unit with probability 0.3, moves away from the spider by one unit with probability 0.3, and stays in place with probability 0.4. The initial distance between the spider and the fly is integer. When the spider and the fly land in the same position, the spider captures the fly.
(a) Construct a Markov chain that describes the relative location of the spider and fly.
(
b) Identify the transient and recurrent states.Problem 5. Consider a Markov chain with states 1 , 2, . . . , 9. and the following tran
Problems
381
Problem
6. *Existence of a recurrent state.
Show that in a Markov chain at least one recurrent state must be accessible from any given state, i.e., for anyi,
there is at least one recurrent j in the setA( i)
of accessible states fromi.
Solution. Fix a state
i.
Ifi
is recurrent, then every j EA(i)
is also recurrent so we are done. Assume thati
is transient. Then, there exists a state h EA(i)
such thati rJ. A(id.
Ifil
is recurrent, then we have found a recurrent state that is accessible fromi,
and we are done. Suppose now thatil
is transient. Then,il '#
i because otherwise the assumptionsil
EA(i)
andi rJ. A(id
would yieldi
EA(i)
andi rJ. A(i).
which is a contradiction. Sinceil
is transient, there exists somei2
such thati2
EA(id
andi
1rJ. A (i2)'
In particular,i2
EA (i).
Ifi2
is recurrent, we are done. So, suppose thati2
is transient. The same argument as before shows that
i2 '# il.
Furthermore, we must also havei2 '# i.
This is because if we hadi2 i,
we would haveil
EA(i)
=A(i2),
contradicting the assumption
it rJ. A(i2)'
Continuing this process, at the kth step, we will either obtain a recurrent stateik
which is accessible fromi,
or else we will obtain a transient stateik
which is different than all the preceding statesi, ii , . . . , ik-I.
Since there is only a finite number of states, a recurrent state must ultimately be obtained.Problem
7.* Consider a Markov chain with some transient and some recurrent states.(a) Show that for some numbers c and " with c > 0 and 0
<
I<
1 , we haveP(Xn
is transientI Xo
=
i)
:5 C/n , for alli
and n � 1 .(b) Let T be the first time n at which
Xn
is recurrent. Show that such a time is certain to exist (Le., the probability of the event that there exists a time n at whichXn
is recurrent is equal to 1 ) and thatE[T]
< 00.
Solution. (a) For notational convenience, let
qi(n)
=
P(Xn
transientI Xo
=
i).
A recurrent state that is accessible from state
i
can be reached in at mostm
steps, wherem
is the number of states. Therefore,qi(m)
<
1 . Let{3
=
t=I, ... ,m
, maxqi(m)
and note that for all
i,
we haveqi (m)
:5 {3<
1. If a recurrent state has not been reached382
where the last equality is obtained using the expression for the mean of the geometric distribution.
Problem 8.* Recurrent states. Show that if a recurrent state is visited once, the
probability that it will be visited again in the future is equal to 1 (and, therefore, the probability that it will be visited an infinite number of times is equal to 1).
Hint:
Modify the chain to make the recurrent state of interest the only recurrent state, and use the result of Problem 7(b) .
Solution. Let s be a recurrent state, and suppose that s has been visited once. From
Problems 383
without loss of generality, we can assume that there is a single recurrent class. Suppose that the current state is some
i =f:. s.
We want to show thats
is guaranteed to be visited some time in the future.Consider a new Markov chain in which the transitions out of state
s
are disabled, so that pss=
1.
The transitions out of statesi,
fori =f:. s
are unaffected. Clearly,s
is recurrent in the new chain. Furthermore, for any state
i =f:. s,
there is a positive probability path fromi
tos
in the original chain (sinces
is recurrent in the original chain) , and the same holds true in the new chain. Sincei
is not accessible froms
in the new chain, it follows that everyi =f:. s
in the new chain is transient. By the result of Problem 7(b) , states
will be eventually visited by the new chain (with probability1).
But the original chain is identical to the new one until the time thats
is first visited. Hence, states
is guaranteed to be eventually visited by the original chains.
By repeating this argument, we see that
s
is guaranteed to be visited an infinite number of times (with probability1).
Problem 9. * Periodic classes. Consider a recurrent class R. Show that exactly
one of the following two alternatives must hold:
(i) The states in R can be grouped in
d
>1
disjoint subsetsSI , . . . , Sd,
so that all384 Markov Chains Chap. 7
n
>ni
+ m, and note thatn -
q >ni
+ m -q >ni.
Thus, we can go fromi
to itself inn -
q steps, and then fromi
to j in q steps. Therefore, there is a positive probability path fromi
to j, of lengthn,
so thatTij (n)
> O.We have so far established that at least one of the alternatives given in the problem statement must hold. To establish that they cannot hold simultaneously, note that the first alternative implies that
Tii(n)
= 0 whenevern
is not an integer multiple of d, which is incompatible with the second alternative.For completeness, we now provide a proof of the number-theoretic fact that was used in this problem. We start with the set of positive integers
01 , 02,
..
. , and assume that they have no common divisor other than 1. We define M as the set of all positive integers the form2::=1 kioi,
where theki
are nonnegative integers. Note that this set is closed under addition (the sum of two elements of M is of the same form and mustThis contradiction establishes that 9 must be equal to 1 .
Since 9 = 1 , there exists some positive integer
x
such thatx E
M andx
+ 1E
Af.Problem 10. Consider the two models of machine failure and repair in Example 7.3.
Problem 1 A professor gives tests that are hard, medium, or
next test win be
next test
the same difficulty, and a probability for of the other two levels of difficulty. Construct an appropriate Markov chain and find the steady-state probabilities.
on any way to poor on
way , N
o
w I if
the iso
neof
his n fishingfor
the trip, but if the weather is bad, he will not bring a fishing rod with him. We want to fi nd the probability the trip to or the
(a) n + 1 states
(b) is the on a
but without a fishing rod?
chain, it is already in
(a) (b) (c) (d) (e)
each state i !
7.22 : Transition probability graph for Problem 1 1 .
probability that current state is
i.
we is athe process was state 2
that this change of state was a birth.