1
RANCANG BANGUN SISTEM BUKA TUTUP PALANG PINTU KERETA API SECARA OTOMATISBERBASIS GLOBAL POSITIONING SYSTEM (GPS) DAN WIRELESS RF MODULE (SUB JUDUL: SOFTWARE)
Ayu Citra Ningtias1, M. Safrodin, B.Sc, MT2, Ir. A. Nasir3
Mahasiswa Elektro Industri, Politeknik Elektronika Negeri Surabaya, Surabaya, Indonesia1* [email protected]
Dosen Pembimbing 1, Politeknik Elektronika Negeri Surabaya, Surabaya, Indonesia2 Dosen Pembimbing 2, Politeknik Elektronika Negeri Surabaya, Surabaya, Indonesia3
ABSTRAK
Kecelakaan Kereta Api (KA) sangatlah meresahkan, baik bagi penumpang maupun bagi PT. Kereta Api (persero). Berdasarkan data dari Direktorat Perkeretaapian Dinas Perhubungan RI bahwa pada tahun 2004 sampai dengan tahun 2008, total tabrakan antar KA mencapai 28 kecelakaan dengan jumlah korban luka ringan 345 jiwa, luka berat 340 jiwa dan meninggal dunia mencapai 160 jiwa. Tingginya angka kecelakaan tersebut, 9% disebabkan oleh prasana perkeretaapian. Sistem ini dilengkapi dengan teknologi GPS dan RF module untuk operasi sistem buka tutup palang pintu perlintasan kereta api secara otomatis. Sehingga kecelakaan yang dikarenakan palang pintu perlintasan dapat dikurangi.
Mekanisme pengujian sistem dengan cara membandingkan jarak kereta api yang diperoleh dari lattitude dan longitude dari kereta api dan palang pintu perlintasan. Pada saat pengujian sistem GPS terdapat error yang mencapai 50% pada pengukuran jarak antara palang dan kereta api yang disimulasikan dengan motor. Untuk pengujian aksesoris kereta api dapat bekerja dengan baik. Program yang dibuat juga berjalan dengan baik.
Kata kunci : GPS, RF Module, Lintang, Bujur, Kecepatan
ABSTRACT
Railway accidents is very troubling, both for passengers and for PT. Kereta Api (Persero). Based on data from the Directorate of Railway Transport Department of RI that in 2004 through 2008, total collisions between trains accounted for 28 accidents with casualties slightly injured 345 people, 340 people were seriously injured and died reached 160 souls. The high accident rate, 9% due to facilities railways. The system is equipped with GPS technology and RF modules for operation of the latch open and close system automatically railway crossings. So that the accident which caused a doorstop crossings can be reduced.
The mechanism of the testing system by comparing the distance of the train which is obtained from the latitude and longitude of the railway crossings and door stop. At the time of testing there are GPS systems that reached 50% error in measuring the distance between the crossbar and the trains that simulated with the motor. To test train accessories can work well. Programs that are created are also going well.
Key words: GPS, RF Module, Latitude, Longitude, Speed
I.
PENDAHULUANBerdasarkan data dari Direktorat Perkeretaapian Dinas Perhubungan RI bahwa pada tahun 2004 sampai dengan tahun 2010, total kecelakaan kereta api mencapai 706 kecelakaan. Tingginya angka kecelakaan tersebut, 21% disebabkan Sumber Daya Manusia (SDM) operator KA dan 9% karena prasana yang ada. penyebab utama kecelakaan KA adalah Sumber Daya Manusia (SDM) operator KA dan juga beberapa karena prasana perkeretaapian, hal ini disebabkan karena belum adanya suatu sistem operasi otomatis pada palang pintu perlintasan kereta api. Karena sistem manual harus mengunakan tenaga manusia atau operator untuk mengoperasikan buka tutup palang pintu perlintasan kereta api. Sehingga kesalahan operator maupun gagalnya operasi palang pintu yang secara manual bisa mengakibatkan semakin besar kemungkinan terjadi kecelakan kereta api pada palang pintu perlintasan.
Pada proyek akhir ini dibuat sistem yang dilengkapi dengan teknologi GPS (Global Positioning
System) untuk mengetahui latitude (lintang) dan longitude (bujur) letak kereta api. Pada dasarnya GPS ini merupakan pesawat penerima yang bekerja berdasarkan navigasi gelombang radio dan output datanya berupa NMEA. Data NMEA inilah yang kemudian diparsing dengan mikrokontroler AVR ATMega 162 menjadi informasi – informasi yang menunjukkan posisi kereta api. Mikrokontroler ini dikomunikasikan dengan menggunakan RF Module yang juga digunakan untuk komunikasi antar mikrokontroller yaitu antara ATMEGA162 dan ATMEGA16, untuk lebih tepatnya antara kereta api dan palang pintu perlintasan. Sehingga diketahui posisi kereta api yang nantinya akan dijadikan patokan untuk buka tutup palang pintu kereta api secara otomatis.
II.
PERENCANAAN SISTEM2.1 Gambaran Umum Sistem
2
Gambar 2.1. Gambaran Umum SystemGPS yang dipasang pada kereta apii mengirimkan data melalui XBee PRO dan diolah oleh mikrikontroller dan diproses untuk output palang pintu perlintasan serat aksesoris lainnya.
a. Mikrokontroller ATMega 162
ATmega 162 digunakan untuk memarsing data GPS dan dikirim ke ATMega 16.
b. Mikrokontroller ATMega 16
ATMega 16 digunakan untuk mengolah data GPS yang diterima menjadi data yang dibutuhkan yaitu berupa data jarak dan kecepatan.
c. GPS
GPS ini berfungsi untuk menentukan posisi kereta api yang berupa titik koordinat lintang dan bujur yang dipasang pada lokomotif kereta api. Pada proyek akhir ini menggunakan GPS dengan tipe Leadtek LR9805ST. GPS yang dihubungkan pada USART0 diambil pada pin 11 dari modul GPS.
Gambar 2.1. Modul GPS Pada ATMega 162
d. XBee PRO
RF Module ini digunakan untuk sistem komunikasi antar mikrokontroller, yaitu digunakan untuk mengirim data GPS dari ATMega 162 ke ATMega 16. Din dan Dout pada kaki XBee PRO dihubungkan ke kaki Rx TX ATMega 16. Modul XBee PRO dibuat dua buah yaitu sebagai Receiver dan Transmitter.
Gambar 2.2. Modul GPS Pada ATMega 162
2.2 Perancangan Dan Pembuatan Software
Gambar 2.3. Flowchart Sistem
Software yang dibuat adalah parsing data GPS dan cara mengolah data tersebut dengan menggunakan mikrokontroller serta sistem komunikasi yang digunakan untuk mengirim data GPS yang terletak di kereta api. Selanjutnya mengolah data yang diterima untuk mengaktifkan output sesuai dengan sistem.
2.2.1 Program Pada ATMega 162
Program pada mikrokontroller ATMega 162 terdiri dari program parsing data GPS, dan pengiriman data GPS melalui RF Module.
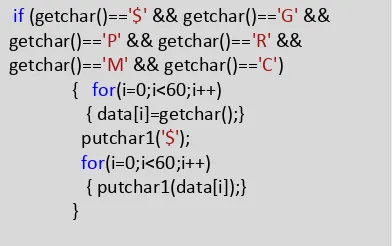
a. Program Parsing Data GPS
Pada sistem dalam proyek akhir ini menggunakan data dengan format data $GPRMC (Recommended minimum specific GNSS data ).
Gambar 2.4. Program Parsing Data GPS if (getchar()=='$' && getchar()=='G' && getchar()=='P' && getchar()=='R' && getchar()=='M' && getchar()=='C') { for(i=0;i<60;i++)
3
Program di atas digunakan untuk parsing data GPSdengan menggunakan perintah “if”. Pada program tersebut jika pada data yang diterima oleh ATMega 162 terdapat format $GPRMC maka selanjutnya data akan diambil sebanyak 60 karakter setelah format tersebut. Data yang diambil selanjutnya diinisialisasikan dengan format integer i. Fungsi getchar digunakan untuk mengambil data yang berasal dari GPS dan yang melakukan perintah tersebut adalah mikrokontroller.
b. Program Pengiriman Data GPS
Setelah data diparsing menggunakan mikrokontroller ATMega 162, maka data harus dikirim ke ATMega 16 untuk diolah kembali. Pengiriman menggunakan XBee PRO yakni secara wireless. Data yang dikirim menggunakan inisialisasi awal $ dan data yang diambil sebanyak 60 data sehingga data tersebut akan diambil oleh ATMega 16.
Gambar 2.5. Program Pengiriman Data GPS
2.2.2 Program Pada ATMega 16
Program yang dilakukan pada ATMega 16 adalah proses untuk menghitung jarak dan kecepatan.
a. Program Pengambilan Data GPS
Gambar 2.6. Program Pengambilan Data GPS
Pada program tersebut jika data yang diinisialisasikan dengan “i” lebih dari 16 karakter maka data selanjutnya akan ditampilkan pada layar LCD baris kedua secara otomatis agar data dapat terbaca sepenuhnya.
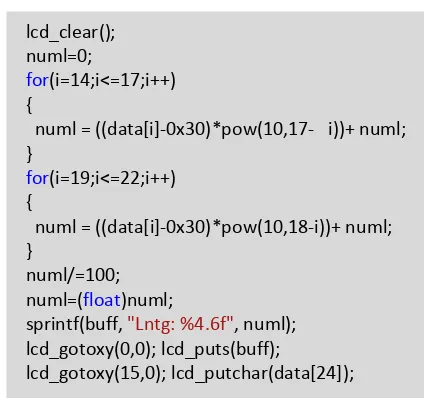
b. Program Penentuan Lintang dan Bujur
Numl digunakan untuk inisialisasi lintang yang awalnya diberikan nilai 0. Numl dibagi dengan 100 untuk memindahkan letak koma yang sesuai dengan format data derajat meridian. Selanjutnya data lintang ditampilkan pada LCD 16x2 baris pertama. Untuk mengetahui arah dari lintang apakah utara atau selatan
maka data tersebut diambil dari data GPS pada karakter ke 24.
Gambar 2.7. Program Penentuan Koordinat Lintang
Gambar 2.8. Program Penentuan Koordinat Bujur
Data bujur dimulai pada karakter ke 26 sampai karakter ke 35 dan arah dari bujur barat atau selatan berada pada karakter ke 37. Bujur ditampilkan pada baris kedua pada LCD 16x2.
c. Program Penentuan Kecepatan GPS
Pada data $GPRMC juga diambil data kecepatan dengan satuan knot. Inisialisasinya adalah nums yang diberikan nilai awal sama seperti lintang dan bujur yaitu nol.
numb = ((data[i]-0x30)*pow(10,30-i))+ numb; }
for(i=32;i<=35;i++) {
numb = ((data[i]-0x30)*pow(10,31-i))+ numb; }
numb/=100;
numb=(float)numb; sprintf(buff, "Bjr:%4.6f", numb); lcd_gotoxy(0,1); lcd_puts(buff);
numl = ((data[i]-0x30)*pow(10,18-i))+ numl; }
numl/=100;
numl=(float)numl; sprintf(buff, "Lntg: %4.6f", numl); lcd_gotoxy(0,0); lcd_puts(buff);
lcd_gotoxy(15,0); lcd_putchar(data[24]);
delay_ms(500); lcd_clear(); nums=0;
for(i=39;i<=39;i++) {
4
Gambar 2.9. Program Penentuan KecepatanKecepatan juga menggunakan buff untuk menyimpan data yang telah diambil dan ditampilkan dengan format2 angka di depan koma dan 3 angka di belakang koma. Untuk menampilkan karakter “knot” maka menggunakan fungsi lcd_putsf.
d. Program Konversi Lintang Bujur
Karena data GPS berupa derajat meridian maka lintang dan bujur harus diubah menjadi satuan meter agar bisa ditentukan jarak dua titik pada proses selanjutnya.
Gambar 2.10. Program Konversi Lintang
Gambar 2.11. Program Konversi Bujur
Sesuai dengan rumus konversi titik koordinat dari Robinson Arthur maka data GPS yang bertipe Degrees Minutes harus diubah menjadi satuan meter yaitu dengan rumus:
Lintang = lintang (DM) x 110067 Bujur = bujur (DM) x 110321
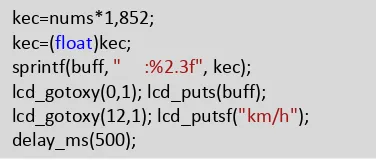
e. Program Konversi Kecepatan
Seperti yang telah dijelaskan di awal, kecepatan yang didapatkan dari data GPS memiliki satuan knot sehingga harus diubah menjadi satuan Km/h.
Gambar 2.11. Program Konversi Kecepatan
Sesuai dengan rumus konversi satuan knot diubah menjadi Km/h dengan dikalikan 1,852. Seperti program
lainnya, program ini juga menngunakan buff untuk menyimpan data dari GPS.
f. Program Perhitungan Jarak
Untuk menetukan jarak maka harus diberikan 1 titik koordinat tetap yaitu titik koordinat palang pintu kereta api. Oleh karena itu, pada program ditetapkan titik koordinat palang pintu kereta api sekaligus dikonversi dengan inisialisasi di bawah ini.
Gambar 2.12. Titik Koordinat Palang Pintu
Gambar 2.13. Program Perhitungan Jarak
g. Program Putar Balik Motor
Program putar balik motor digunakan untuk menutup dan membuka palang pintu perlintasan kereta api. Untuk menutup motor berarti motor dalam kondisi putar kiri, sedangkan pada saat membuka palang maka motor dalam keadaan putar kanan.
Gambar 2.14. Program Motor Putar Kiri
kec=nums*1,852;
kec=(float)kec; sprintf(buff, " :%2.3f", kec); lcd_gotoxy(0,1); lcd_puts(buff); lcd_gotoxy(12,1); lcd_putsf("km/h"); delay_ms(500);
//lintang numl/=100;
numl=(float)numl*110067;
JL = pow((abs(lintang - numl)),2); sprintf(buff, "Lntg:%6.2f", numl);
//bujur
sprintf(buff, "Jarak:%4.2f", jarak); lcd_gotoxy(0,0); lcd_puts(buff); lcd_gotoxy(15,0); lcd_putchar('m');
Lintang = 7.165617 * 110067; Bujur = 112.476623 * 110321;
void TUTUP(void)
sprintf(buff, "Lntg:%6.2f", numl);
numb=(float)numb*110321; sprintf(buff, "Bjr:%7.2f", numb);
5
Gambar 2.15. Program Motor Putar KananPada putar balik motor juga dilengkapi dengan limit switch yang befungsi sebagai input untuk membatasi putaran motor. Pada palang pintu kereta api dipasang 2 buah limit switch yang diletakkan pada PORTB pin 0 dan pin 1. Jika limit switch aktif atau mendapat logika 1 maka motor akan berhenti berputar baik pada saat menutup maupun membuka palang pintu kereta api.
III.
PENGUJIAN DAN ANALISA SISTEM3.1 Komunikasi Serial Mikro Dengan PC
Pada pengujian serial minimum system mikrokontroler AVR ATMega 162 terdapat 2 register USART yang digunakan untuk interface perangkat GPS dan XBee PRO. Register USART untuk GPS adalah RX0 dan TX0, sedangkan untuk XBee PRO menggunakan register RX1 dan TX1.
a. Pengujian USART Untuk GPS
Dalam pengujian ini, baudrate mikrokontroler AVR ATMega 162 harus sesuai dengan baudrate GPS yaitu 4800bps. Adapun bentuk pengujiannya adalah dengan mengirimkan karakter – karakter data pada GPS ke PC yang ditampilkan melalui HyperTerminal melalui komunikasi serial.
Baudrate yang digunakan adalah baudrate default GPS yaitu 4800 dan setting lainnya sama dengan setting pada PC.
Gambar 3.1. Tampilan Data GPS
Data pada GPS juga dibandingkan dengan data koordinat pada Wikimapia. Gambar 4.2 merupakan titik koordinat PENS – ITS dan dat tersebut hampir sesuai dengan titik koordinat dari GPS.
b. Pengujian USART Untuk XBee PRO
Pengujian USART selanjutnya dalah untuk XBee PRO dengan menggunakan software X-CTU. Pada pengujian ini dilakukan setting baudrate XBee PRO yaitu 9600bps dan sambungan berada pada com 23 pada PC. Sambungan menggunakan kabel serial dan menggunakan rangkaian dengan RS232.
Gambar 3.2. Pengujian USART XBee PRO
3.2 Pengujian Data Gps Melalui Xbee Pro
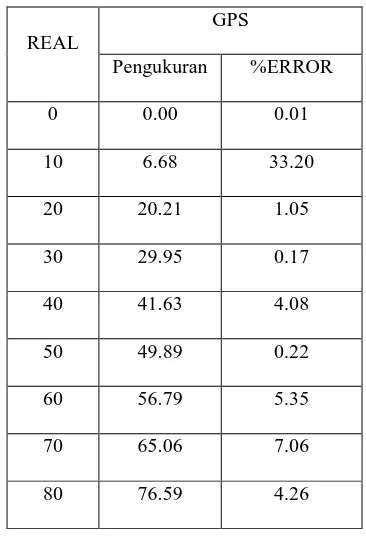
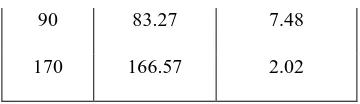
Pengujian ini dimaksudkan untuk mengetahui akurasi dari GPS dan bagaimana proses komunikasi menggunakan XBee PRO. Pada tabel 3.1. ini ditunjukkan data hasil pengujian jarak menggunakan GPS dan dibandingkan dengan data pengukuran.
Tabel 3.1. Pengujian XBee PRO Outdoor
REAL
GPS
Pengukuran %ERROR
0 0.00 0.01
10 6.68 33.20
20 20.21 1.05
30 29.95 0.17
40 41.63 4.08
50 49.89 0.22
60 56.79 5.35
70 65.06 7.06
80 76.59 4.26
void BUKA(void) {
PORTC.5 = 0; PORTC.3 = 0; PORTC.4= 0; PORTC.1 = 1;
{ if(PINB.1!=0) PORTC.1 = 1; else
{ PORTC.1 = 0; delay_ms(1000); } }
6
90 83.27 7.48
170 166.57 2.02
Pada pengujian XBee PRO seperti pada tabel 3.1 terdapat error yang cukup besar hingga mencapai lebih dari 40%. Hal ini bisa disebabkan karena kurangnya kepresisian dari GPS karena XBee PRO bisa mengirim dengan baik terbukti pada modul XBee PRO lampu indikator selalu ON yang berarti data dapat diterima.
3.3 Pengujian Sistem
Pengujian sistem merupakan pengujian data – data GPS yang telah dibuat sesuai dengan perencanaan yang meliputi penganmilan data GPS dan diproses sampai pengujian program untuk jarak dan integrasi sistem.
a. Parsing Data $GPRMC Pada GPS
Data $GPRMC diambil mulai karakter ke-14 yaitu pada karakter pertama koordinat lintang dan ditampilkan pada layar LCD 16x2 dengan backlight yang menyala.
Gambar 3.3. Tampilan Data $GPRMC
b. Parsing Data Lintang Dan Bujur
Pengujian ini dimaksudkan untuk mengetahui titik koordinat lintang dan bujur dari suatu posisi. Titik koordinat lintang dan bujur yang didapat merupakan hasil parsing data $GPRMC.
Gambar 3.4. Data Lintang Dan Bujur
c. Parsing Data Kecepatan
Kecepatan GPS berada pada karakter ke- 38 dari data $GPRMC dan ditampilkan pada LCD 16x2 dengan format yang telah dibuat dengan satuan knot.
Gambar 3.5. Data Kecepatan Dalam Satuan Knot
d. Konversi Lintang Dan Bujur
Untuk mendapatkan jarak dari titik koordinat lintang an bujur maka titik koordinat yang bertipe Degrees Minutes harus dikonversi dalam satuan meter.
Gambar 3.6. Konversi Lintang Dan Bujur
Lintang 7.165673 * 110067 = 788704,1301 Bujur 112.476585 * 110321 = 12408529,33
e. Konversi Kecepatan
Seperti halnya konversi lintang dan bujur, kecepatan juga harus dikonversi ke satuan km/jam agar bisa disesuaikan dengan kecepatan pada prasarana yang akan digunakan untuk simulasi yaitu sepeda motor sebagai pengganti dari kereta api.
Gambar 3.7. Konversi Kecepatan
Kecepatan 27.420 * 1.852 = 50.80926
f. Pengujian Jarak Dan Kecepatan
Pengujian ini dimaksudkan untuk mengetahui jarak palang dan kereta api serta kecepatan kereta. Pada LCD 16x2 ditampilkan jarak dengan saruan meter dan kecepatan dengan satuan km/jam.
Gambar 4.15. Jarak Dan Kecepatan
3.4 Analisa
Berdasarkan pengujian data GPS yang telah dilakukan, proses tracking data untuk diterima membutuhkan waktu karena GPS juga mendeteksi sinyal. Sinyal GPS dipengaruhi beberapa faktor seperti cuaca dan adanya gedung – gedung tinggi yang bisa membuat sinyal GPS tidak bagus dan lama dalam tracking data. Hal ini karena tipe GPS yang digunakan adalah GPS outdoor sehingga tidak bisa jika digunakan di dalam ruangan. Pada saat pengujian jarak menggunakan XBee Pro terjadi error yang cukup besar yaitu mencapai 50% dan terjadi ketidakakuratan data karena titik koordinat melenceng beberapa digit data. Untuk pengujian data GPS dengan perintah – perintah yang digunakan untuk mengonversi data didapatkan hasil yang presisi jika dibandingkan dengan perhitungan secara manual.
Saat data GPS diujikan dengan sistem, lampu indikator, buzzer, dan limit switch bekerja dengan baik. Sedangkan untuk palang pintu kereta api masih terjadi error.
IV.
KESIMPULAN DAN SARAN4.1 KESIMPULAN
7
Hasil tracking koordinat lintang dan bujur rutekereta api oleh GPS sangat dipengaruhi oleh kondisi cuaca saat itu. Saat kondisi mendung atau terhalang gedung maka GPS tidak mendapat sinyal, sehingga proses tracking data cukuplama, sedang di tempat terbuka dengan cuaca cerah GPS mudah untuk mendapat sinyal.
Komunikasi XBee PRO hanya bisa sampai 500 meter karena tracking yang kurang mendukung. Proses penerimaan data cukup lama jika jarak yang ditempuh lebih jauh. Dan XBee PRO hanya bisa digunakan pada kondisi loss tanpa ada halangan apapun.
Terjadi ketidakpresisian data GPS pada saat dilakukan pengujian jarak, yaitu terjadi error rata – rata 5 %.
Aksesoris palang pintu perlintasan jika diberikan logika dari mikrokontroller juga dapat bekerja, jika diberikan logika „1‟ maka aksesoris yang berupa lampu indikator dan buzzer akan ON.
4.2 SARAN
Dari hasil PA ini masih terdapat beberapa kekurangan dan dimungkinkan untuk pengembangan lebih lanjut. Oleh karenanya penulis merasa perlu untuk memberi saran-saran sebagai berikut :
Untuk pengembangan lebih lanjut, penulis menyarankan untuk menggunakan GPS dengan resolusi yang lebih tinggi dan merupakan GPS indoor.
Lebih baik menggunakan wireless modulle outdoor dengan antena eksternal agar proses komunikasi lebih baik.
Untuk pengujian sistem mungkin bisa diterapkan secara langsung pada kereta api sehingga track lebih panjang dan kecepatan yang didapatkan lebih akurat.
Untuk pengembangan selanjutnya, penulis menyarankan XBee PRO diganti dengan GSM Modem baik dari sisi pengirim maupun penerima karena lebih stabil.
V.
DAFTAR PUSTAKA[1] Ditjen Perkeretaapian Dishub RI
[2] Ali Murtadlo, “Simulasi Sistem Informasi Posisi Kereta Api Dengan Menggunakan GPS Untuk Keselamatan Penumpang”, PENS – ITS, SURABAYA
[3] Moch Harun Arrosyid, “Implementasi Wireless Sensor Network Untuk Monitoring Parameter Energi Listrik Sebagai Peningkatan Layanan Bagi Penyedia Energi Listrik”, PENS – ITS, SURABAYA
[4] Datasheet Xbee PRO
http://ssdl.stanford.edu/ssdl/images/stories/AA236
/0708A/Lab/Rover/P arts
/xbeeproproductmanual.pdf
[5] http://www.atmel.com/
[6] http://www.alldatasheet.com/
[7]