BAB I PENDAHULUAN
1.1. Latar belakang
Jalan raya adalah salah satu sarana transportasi yanag paling banyak dipergunakan untuk menunjang perekonomian maupun kegiatan-kegiatan manusia sehari-hari. Jalan raya berfungsi untuk melewatkan lalu lintas diatasnya dengan cepat, aman dan nyaman. Transportasi darat merupakan sistem trasportasi yang terbesar dan yang paling mendapat perhatian. Hal ini terutama disebabkan oleh aktivitas manusia pada umumnya dilakukan di darat, dimana sistem transportasi darat ini memerlukan prasarana jalan sebagai jalur penghubung sebagai penunjang perekonomian, perkembangan wilayah, perkembangan sosial dan perkembangan kebudayaan.
Ditinjau dari segi manfaatnya tersebut maka jalan raya sangat memerlukan pengembangan dan pengelolaan yang sungguh-sungguh agar selalu dapat melayani kebutuhan lalu lintas bagi masyarakat yang semakin meningkat.
Untuk mendapatkan jalan yang baik dan nyaman, sesuai dengan kelas jalan yang telah ditetapkan oleh pemerintah yaitu Direktorat Jenderal Bina Marga maka perlu ditinjau aspek geometriknya sebagai dasar perencanaan untuk menentukan kecepatan rencana yang layak untuk jalan tersebut. Kecepatan rencana ( VR ) adalah kecepatan yang dipilih sebagai dasar perencanaan geometrik yang memungkinkan kendaraan-kendaraan bergerak dengan aman dan nyaman dengan kondisi cuaca yang cerah, lalu lintas yang lengang dan pengaruh samping jalan yang tidak berarti (Sukirman S, 1994).
1.2. Rumusan masalah
Dari uraian di atas, dapat dirumuskan beberapa masalah yaitu : 1. Bagaimana proses pembuatan Perencanaan Teknik Jalan Raya? 1.3. Tujuan
Adapun tujuan dari penelitian adalah sebagai berikut :
1. Mengetahui proses pembuatan Perencanaan Teknik Jalan Raya. 1.4. Manfaat
BAB II
TINJAUAN PUSTAKA
2.1. Jalan Raya
2.1.1. Pengertian Jalan Raya
Jalan adalah prasarana transportasi darat yang meliputi segala bagian jalan, termasuk bangunan pelengkap dan perlengkapannya yang diperuntukkan bagi lalu lintas, yang berada pada permukaan tanah, di atas permukaan tanah, di bawah permukaan tanah dan/atau air, serta di atas permukaan air, kecuali jalan kereta api, jalan lori, dan jalan kabel (Peraturan Pemerintah Nomor 34 Tahun 2006).
Jalan raya adalah jalur - jalur tanah di atas permukaan bumi yang dibuat oleh manusia dengan bentuk, ukuran - ukuran dan jenis konstruksinya sehingga dapat digunakan untuk menyalurkan lalu lintas orang, hewan dan kendaraan yang mengangkut barang dari suatu tempat ke tempat lainnya dengan mudah dan cepat (Clarkson H.Oglesby,1999).
2.1.2. Klasifikasi Jalan Raya
Jalan raya pada umumnya dapat digolongkan dalam 4 klasifikasi yaitu: klasifikasi menurut fungsi jalan, klasifkasi menurut kelas jalan, klasifikasi menurut medan jalan dan klasifikasi menurut wewenang pembinaan jalan (Bina Marga 1997).
2.1.2.1. Klasifikasi Menurut Fungsi Jalan
Klasifikasi menurut fungsi jalan terdiri atas 3 golongan yaitu:
3. Jalan lokal yaitu Jalan yang melayani angkutan setempat dengan ciri-ciri perjalanan jarak dekat, kecepatan rata-rata rendah, dan jumlah jalan masuk tidak dibatasi.
2.1.2.2. Klasifikasi Menurut Kelas Jalan
Klasifikasi menurut kelas jalan berkaitan dengan kemampuan jalan untuk menerima beban lalu lintas, dinyatakan dalam muatan sumbu terberat (MST) dalam satuan ton.
Tabel 2.1. Klasifikasi jalan raya menurut kelas jalan
Fungsi Kelas Terberat/MST (ton)Muatan Sumbu
Arteri
Sumber : Tata Cara Perencanaan Geometrik Jalan Antar Kota, Ditjen Bina Marga, 1997.
2.1.2.3. Klafifikasi Menurut Medan Jalan
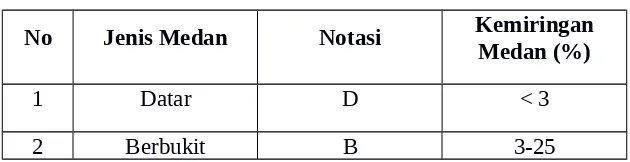
Medan jalan diklasifikasikan berdasarkan kondisi sebagian besar kemiringan medan yang diukur tegak lurus garis kontur. Keseragaman kondisi medan yang diproyeksikan harus mempertimbangkan keseragaman kondisi medan menurut rencana trase jalan dengan mengabaikan perubahan-perubahan pada bagian kecil dari segmen rencana jalan tersebut.
Tabel 2..2. Klasifikasi Menurut Medan Jalan
No Jenis Medan Notasi KemiringanMedan (%)
3 Pegunungan G >25
Sumber : Tata Cara Perencanaan Geometrik Jalan Antar Kota, Ditjen Bina Marga 1997.
2.1.2.4. Klasifikasi Menurut Wewenang Pembinaan Jalan (Bina Marga 1997) Klasifikasi menurut wewenang pembinaan jalan terdiri dari:
1. Jalan desa, yang meliputi semua jalan di desa.
2. Jalan kabupaten atau kotamadya, yang meliputi semua jalan di kabupaten dan kotamadya.
3. Jalan propinsi, selain melayani lalu lintas dalam propinsi, juga berfungsi menghubungkan dengan propinsi lainnya.
4. Jalan negara, berfungsi menghubungkan ibukota-ibukota propinsi. 2.2. Perencanaan Jalan Raya
2.2.1 Alinyemen Horizontal
PANJANG BAGIAN LURUS
LENGKUNG (TIKUNGAN)
RUMUS UMUM LENGKUNG HORIZONTAL
o
Rmin = Jari jari tikungan minimum (m) Fungsi
Fungsi
Panjang Bagian Lurus Maximum
Panjang Bagian Lurus Maximum (m) (m)
Datar
Datar PerbukitanPerbukitan PegununganPegunungan
Arteri
Arteri 30003000 25002500 20002000
Kolektor
Kolektor 20002000 17501750 15001500
Lokal
Dmax = Derajat maksimum
VR = Kecepatan kendaraan rencana (Km/jam) emax = Superelevasi maksimum (%)
fmax = Koefisien gesekkan melintang maksimum
Bentuk lengkung horizontal: 1. Full Circle
Lengkung yang hanya terdiri dari bagian lengkung tanpa adanya peralihan. Yang dimaksud disini adalah hanya ada satu jari2 lingkaran pada lengkung tersebut.
Keterangan gambar : ∆ = sudut tikungan O = titik pusat lingkaran
T = panjang tangen , jarak dari TC – PI dan PI – CT R = jari-jari lingkaran
Lc = panjang busur lingkaran E = jarak PI ke CC
dapat dihitung dengan rumus berikut ini:
Lengkung terdiri atas bagian lengkungan (Circle) dengan bagian peralihan (Spiral) untuk menghubungkan dengan bagian yang lurus FC. Dua bagian lengkung di kanan-kiri FC itulah yg disebut Spiral. (lihat perbedaan dengan FC).
Keterangan :
Xs = absis titik SC pada garis tangent, jarak dari titik TS ke SC
Ys = ordinat titik SC pada garis tegak lurus garis tangent. jarak tegak lurus ke titik SC pada lengkung
Ls = panjang lengkung peralihan (panjang TS ke SC atau CS ke ST) Lc = panjang busur lingkaran ( panjang dari SC ke CS )
TS = titik dari tangent ke spiral SC = titik dari spiral ke lingkaran Es = jarak dari PI ke busur lingkaran Rc = jari-jari lingkaran
Θ s = sudut lengkung dpiral
dapat dihitung dengan rumus dibawah ini:
3. Spiral – Spiral
dapat dihitung dengan rumus dibawah ini:
Diagram Super Elevasi Circle-Circle
Diagram Super Elevasi Spiral-Spiral Tikungan Gabungan :
2.2.2 Alinyemen Vertikal
Pada gambar akan terlihat apakah jalan tersebut tanpa kelandaian, mendaki atau menurun, pada perencanaan alinyemen vertikal ini di pertimbangkan b17agaimana meletakkan sumbu jalan sesuai kondisi medan dengan menperhatikan sifat operasi kendaraan, keamanan jarak pandang dan fungsi jalan. Pemilihan alinyemen vertikal, berkaitan dengan pekerjaan tanah yang mungkin timbul akibat adanya galian dan timbunan yang harus di lakukan.
Kondisi yang baik antara alinyemen vertikal dan horinzontal memberikan keamanan dan kenyamanan pada pemakai jalan. Perencanaan ini diharapkan dapat miningkatkan umur pada konstruksi jalan tersebut. Selain itu dari segi ekonomis diharapkan dapat menguntungkan.
Kelandaian maksimum
Pembatasan kelandaian (maksimum) dimaksudkan untuk memungkinkan kendaraan bergerak terus tanpa harus kehilangan kecepatan yang berarti.
Panjang lengkung vertikal
Lengkung vertikal dalam standar ini ditetapkan berbentuk parabola sederhana. Panjang lengkung vertikal cembung, berdasarkan jarak pandangan henti dapat ditentukan dengan rumus berikut :
a. Jika jarak pandang lebih kecil dari panjang lengkung vertikal (s < l)
b. Jika jarak pandang lebih besar dari panjang lengkung vertikal (S > L)
Panjang lengkung vertikal cekung berdasarkan jarak pandangan henti dapat ditentukan dengan rumus berikut (AASHTO, 2001) :
a. Jika jarak pandang lebih kecil dari panjang lengkung vertikal (S < L)
b. Jika jarak pandang lebih besar dari panjang lengkung vertikal (S > L)
dengan pengertian :
L = panjang lengkung cekung (m) A = perbedaan aljabar landai (%) S = jarak pandang henti (m)
b. Jika jarak pandang lebih besar dari panjang lengkung vertikal (S > L)
dengan pengertian :
L = panjang lengkung vertikal cekung (m) A = perbedaan aljabar landai (%)
BAB III
ANALISA DATA
c. Azimuth
α AB = 135˚36’35”
α BC = α AB - α BA
= 135˚36’35” - 72˚2’58”
= 63˚33’37”
= 63,5604˚
α CD = α BC - BCD + 180°˂
= 63˚33’37” - 143˚12’19” + 180°
= 26˚45’56”
= 26,7657˚
α DE = α DC - CDE + 180°˂
= 26˚45’56” - 97˚35’40” - 180°
= 109˚10’19”
= 109,1712˚
= 36,7947˚
Δ3 (PI-III) = ( α CD - α DE ) + 180˚
= ( 26,7657˚ - 109,1712˚ ) + 180˚
Diketahui :
a. Menentukan R rencana dan mencari derajat kelengkungan Rmin= VR
Direncanakan Rrencana > Rmin = 250 > 209,974
b. Mencari panjang lengkung spiral (Ls)
1. Berdasarkan waktu tempuh max (3 dt) untuk melintasi lengkung peralihan Ls=VR
3,6×T Ls=80
3,6×3 Ls=66,667m
2. Berdasarkan antisipasi gaya sentrifugal (Modifikasi Shortt)
Ls=0,022 VR
3. Berdasarkan tingkat pencapaian perubahan kelandaian e
4. Berdasarkan dari tabel panjang minimal spiral Dari tabel diperoleh Ls = 80 m
c. Sudut apit sudut spiral (θs)
d. Panjang lengkung circle (Lc)
Karena Lc > 25 m , maka digunakan diagram S-C-S e. Panjang lengkung total (Lt)
Lt = Lc + 2 Ls Lt = 234,378 + 2 .80 Lt = 394,378 m
f. Pergeseran terhadap tangen asli (p) θs
i. Menghitung Es
j. Menghitung nilai Xs dan Ys
Xs=Ls
(
1− Ls Rrencana = 250 mLs = 80 m
θs = 9,167
a. Panjang lengkung circle (Lc) Lc=(∆2−2θs)
180 . π . Rc
Lc=(36,7947−2.9,167)
180 . π .250 Lc=80,550m
b. Panjang lengkung total (Lt) Lt = Lc + 2 Ls
Lt = 80,550 + 2 .80 Lt = 240,550 m
c. Pergeseran terhadap tangen asli (p) θs
g. Menghitung nilai Xs dan Ys
TIKUNGAN III (PI III) Diketahui :
∆3 = 82,4056
Rmin = 209,974 m Rrencana = 250 m
Ls = 80 m
θs = 9,167
a. Panjang lengkung circle (Lc) Lc=(∆3−2θs)
180 . π . Rc
Lc=(82,4056−2.9,167)
180 . π .250
Lc=279,565m
Karena Lc > 25 m , maka digunakan diagram S-C-S b. Panjang lengkung total (Lt)
c. Pergeseran terhadap tangen asli (p)
282,4056+39,967 Ts=259,787m
g. Menghitung nilai Xs dan Ys
3.2. PERENCANAAN ALINYEMEN VERTIKAL Diketahui :
VR = 80 km/jam
Kelandaian maksimum = 5 % Jarak pandang henti (Jh) = 120 m Jarak pandang mendahului (Jd) = 550 m
Perencanaan lengkung vertikal I 1. Menghitung Kelandaian Rencana
g1=(575−412,5)
5233 ×100=3,11 g2=(575−475)
900 ×100=11,11 2. Mencari Panjang L
a. Berdasarkan jarak pandang henti
Jh<L ,maka:L=
b. Berdasarkan jarak mendahului
Jd<L , maka:L=A × Jd
2 840
Memenuhi
L=(3,11+11,11)×550 c. Berdasarkan jarak kenyamanan
L = A x Y
= ( 3,11 + 11,11 ) x 8 = 113,76 m
d. Berdasarkan jarak dari tabel
Dari tabel panjang minimum lengkung vertikal diperoleh panjang lengkung = (80 – 150) m.
Jadi panjang L
Berdasarkan jarak pandang henti = 505,60 m
Berdasarkan jarak mendahului = 5120,89 m
Berdasarkan jarak kenyamanan = 113,76 m
Berdasarkan jarak dari tabel = (80 – 150) m
Dengan pertimbangan ekonomis maka diambil L = 200 m
Memenuhi
3. Menghitung Pergeseran Vertikal Dari Titik PPV ke Bagian Lengkung
Perencanaan lengkung vertikal II 1. Menghitung Kelandaian Rencana
g2=(575−475)
900 ×100=11,11 g3=(675−475)
3350 ×100=5,97 2. Mencari Panjang L
a. Berdasarkan jarak pandang henti
Jh<L ,maka:L=A × Jh
b. Berdasarkan jarak mendahului
L=2 .550− 840 (11,11−5,97) L=942,11m
c. Berdasarkan jarak kenyamanan L = A x Y
= ( 11,11 - 5,97 ) x 8 = 41,12 m
d. Berdasarkan jarak dari tabel
Dari tabel panjang minimum lengkung vertikal diperoleh panjang lengkung = (80 – 150) m.
Jadi panjang L
Berdasarkan jarak pandang henti = 182,76 m
Berdasarkan jarak mendahului = 942,11 m
Berdasarkan jarak kenyamanan = 41,12 m
Berdasarkan jarak dari tabel = (80 – 150) m
Dengan pertimbangan ekonomis maka diambil L = 200 m 3. Menghitung Pergeseran Vertikal Dari Titik PPV ke Bagian Lengkung
Ev=A × L
800
Ev=(11,11−5,97)×200
800
Ev=1,285m
DAFTAR PUSTAKA
http://repository.usu.ac.id/bitstream/123456789/26171/3/Chapter%20II.pdf
http://pratomolegowo.blogspot.com/2011/02/alinyemen-horizontal_15.html
http://fadlyfauzie.wordpress.com/2010/12/15/vertical-alignment/