BAB 4
PERHITUNGAN PARAMETER
AERODINAMIKA ROKET POLYOT
4.1 Perhitungan Parameter Aerodinamika Roket Polyot
Menggunakan Digital Datcom dan Missile Datcom
Roket Polyot dalam operasinya memiliki lintas terbang yang unik sehingga dibutuhkan dua pendekatan dalam perhitungan parameter aerodinamikanya. Setelah didorong keluar dari pesawat pembawa (carrier aircraft) dengan arah kecepatan yang berlawanan dengan arah kecepatan pesawat pembawa, roket Polyot mengalami gerak terbang layang dengan kecepatan ke arah belakang dari roket Polyot (searah dengan kecepatan pesawat pembawa). Oleh karena itu, parameter aerodinamika dari roket Polyot pun memiliki dua jenis, yaitu pada kondisi kecepatan ke arah belakang (mundur) dan pada kondisi kecepatan ke arah depan (maju).
Pada kondisi kecepatan ke arah belakang perhitungan parameter aerodinamika dilakukan dengan perangkat lunak Digital Datcom dengan memodelkan roket Polyot sebagai konfigurasi Body Alone.
Untuk kondisi kecepatan ke arah depan perhitungan parameter aerodinamika dilakukan dengan perangkat lunak Missile Datcom dengan memodelkan roket Polyot sebagai missile.
Dalam perhitungan parameter-parameter aerodinamika seperti gaya angkat, gaya hambat, dan momen aerodinamika, perangkat lunak Digital Datcom dan Missile Datcom membutuhkan data-data geometri roket Polyot yang digunakan.
4.2 Variabel Input Digital Datcom dan Missile Datcom pada
Konfigurasi Roket Polyot
Variabel geometri yang dibutuhkan sebagai input pada Digital Datcom dan Missile Datcom adalah pendefinisian titik-titik koordinat geometri roket Polyot pada sumbu horisontal (X) dan sumbu vertikal (Z) beserta ukuran luas (S), keliling (P), dan
Tabel 4-1.Variabel input Datcom arah depan X (m) Zupper (m) Zlower (m) S (m2) R (m) P (m) 0 0 0 0 0 0 7.134146 1.5 -1.5 7.068583 1.5 9.424778 12.52439 1.5 -1.5 7.068583 1.5 9.424778 13.47561 1.3 -1.3 5.309292 1.3 8.168141 19.65854 1.3 -1.3 5.309292 1.3 8.168141 20.60976 1.6 -1.6 8.042477 1.6 10.0531 32.5 1.6 -1.6 8.042477 1.6 10.0531 -2 -1.5 -1 -0.5 0 0.5 1 1.5 2 0 5 10 15 20 25 30 35 X (m ) Z ( m ) Z upper Z low er
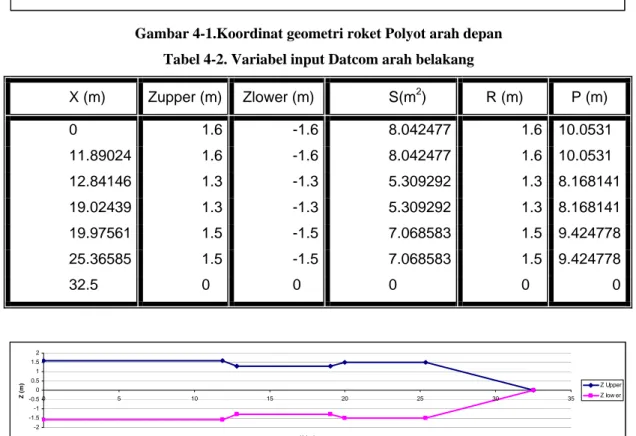
Gambar 4-1.Koordinat geometri roket Polyot arah depan Tabel 4-2. Variabel input Datcom arah belakang
X (m) Zupper (m) Zlower (m) S(m2) R (m) P (m) 0 1.6 -1.6 8.042477 1.6 10.0531 11.89024 1.6 -1.6 8.042477 1.6 10.0531 12.84146 1.3 -1.3 5.309292 1.3 8.168141 19.02439 1.3 -1.3 5.309292 1.3 8.168141 19.97561 1.5 -1.5 7.068583 1.5 9.424778 25.36585 1.5 -1.5 7.068583 1.5 9.424778 32.5 0 0 0 0 0 -2 -1.5 -1 -0.5 0 0.5 1 1.5 2 0 5 10 15 20 25 30 35 X (m ) Z (m ) Z Upper Z low er
Gambar 4-2. Koordinat geometri roket Polyot arah belakang
Penulisan listing untuk memasukkan data-data variabel yang dibutuhkan digunakan aplikasi text editor. Bentuk listing untuk input data-data variabel untuk analisa roket Polyot dapat dilihat di Lampiran A untuk digital Datcom dan Lampiran C untuk missile Datcom.
4.3 Hasil Prediksi Digital Datcom dan Missile Datcom
Terhadap Parameter Aerodinamika Roket Polyot
Berikut ini ditampilkan hasil prediksi Digital Datcom dan Missile Datcom terhadap harga parameter-parameter aerodinamika roket Polyot yang akan digunakan dalam pelaksanaan simulasi gerak roket Polyot.
4.3.1 Karakteristik CD, CL Terhadap Bilangan Mach pada
Ketinggian Konstan
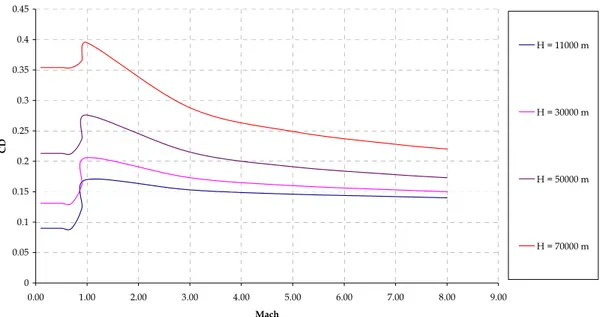
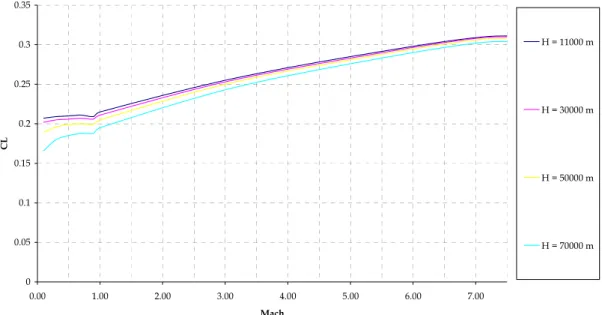
Gambar 4.3 dan 4.4 di bawah ini menampilkan harga-harga CD dan CL pada
bilangan Mach yang bervariasi dari 0.1 hingga 8.0. Variasi dilakukan pada haga sudut serang (α) konstan 5 derajat dan pada ketinggian terbang yang berbeda-beda untuk memperoleh pengaruh ketinggian terhadap harga-harga CD dan CL.
CD vs Mach (h konstan) 0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.00 1.00 2.00 3.00 4.00 5.00 6.00 7.00 8.00 9.00 Mach CD H = 11000 m H = 30000 m H = 50000 m H = 70000 m
CL vs Mach 0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.00 1.00 2.00 3.00 4.00 5.00 6.00 7.00 Mach CL H = 11000 m H = 30000 m H = 50000 m H = 70000 m
Gambar 4-4. Grafik CL terhadap bilangan Mach (H konstan)
Pada gambar 4.3 dan 4.4 di atas dapat dilihat bahwa kurva CD dan CL memiliki
trend grafik yang sama untuk ketinggian yang berbeda. Pada grafik CD, harga CD akan
semakin besar dengan bertambahnya ketinggian. Sedangkan pada grafik CL harganya
akan semakin kecil dengan bertambahnya ketinggian, namun perbedaan harga yang terjadi cukup kecil terutama pada harga bilangan Mach yang tinggi.
4.3.2 Karakteristik CD, CL Terhadap Sudut Serang pada Bilangan Mach Konstan
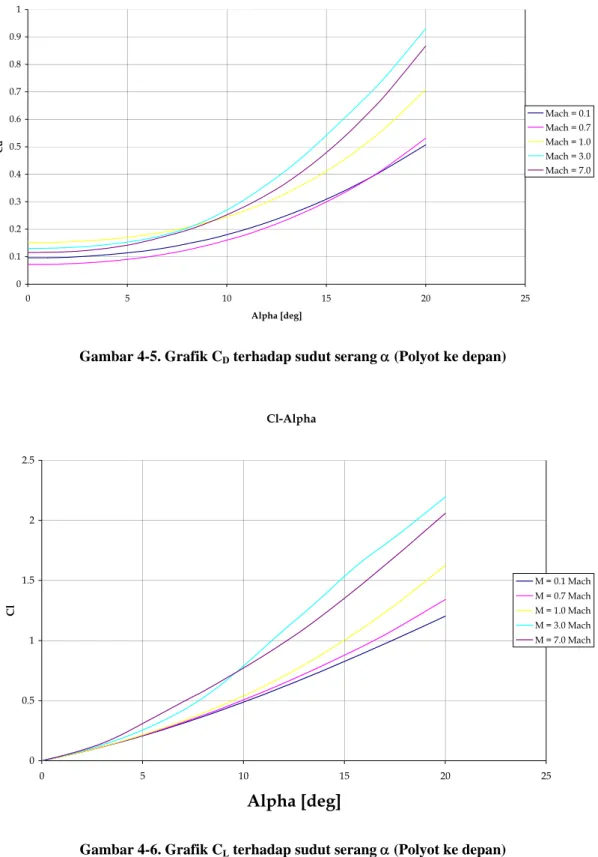
Berikut akan ditampilkan harga-harga CD dan CL pada variasi sudut serang
dari 0 (nol) sampai 20 derajat. Harga-harga CD dan CL yang ditampilkan adalah
harga-harga pada kondisi roket Polyot ke arah depan dan ke arah belakang. Pemvariasian tersebut dilakukan pada harga ketinggian konstan 11000 m dan pada beberapa harga bilangan Mach.
Cd vs Alpha 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 0 5 10 15 20 25 Alpha [deg] Cd Mach = 0.1 Mach = 0.7 Mach = 1.0 Mach = 3.0 Mach = 7.0
Gambar 4-5. Grafik CD terhadap sudut serang α (Polyot ke depan)
Cl-Alpha 0 0.5 1 1.5 2 2.5 0 5 10 15 20 25 Alpha [deg] Cl M = 0.1 Mach M = 0.7 Mach M = 1.0 Mach M = 3.0 Mach M = 7.0 Mach
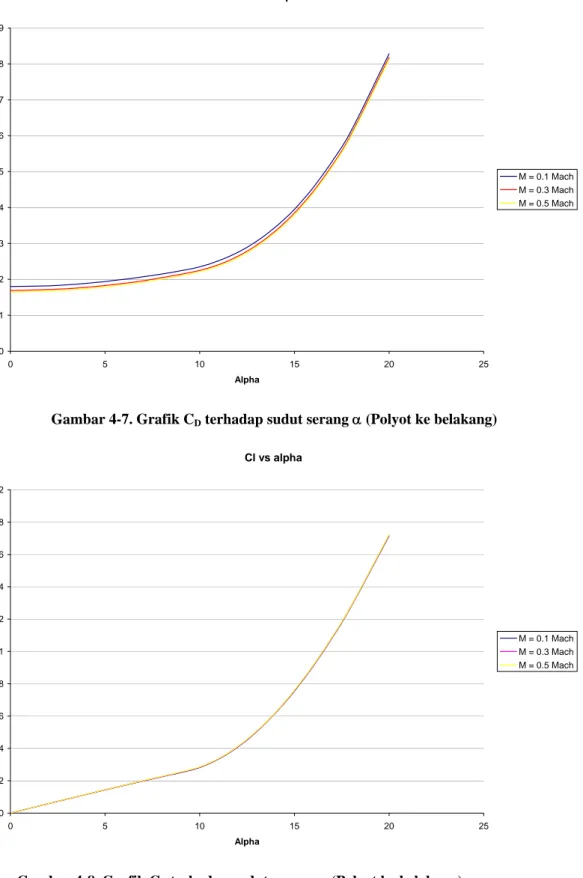
Cd vs Alpha 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 0 5 10 15 20 25 Alpha Cd M = 0.1 Mach M = 0.3 Mach M = 0.5 Mach
Gambar 4-7. Grafik CD terhadap sudut serang α (Polyot ke belakang)
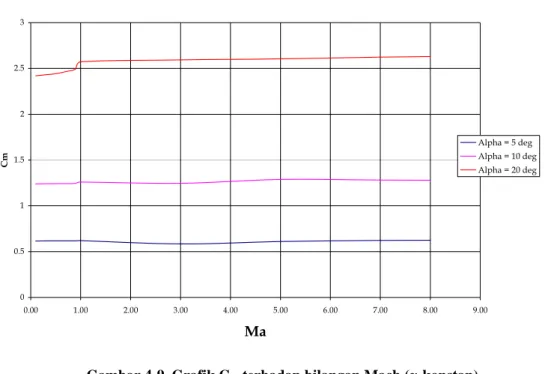
Cl vs alpha 0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2 0 5 10 15 20 25 Alpha Cl M = 0.1 Mach M = 0.3 Mach M = 0.5 Mach
Gambar 4-8. Grafik CL terhadap sudut serang α (Polyot ke belakang)
Pada gambar 4.5 dan 4.7 terlihat bahwa harga CD akan semakin besar dengan
bertambahnya harga sudut serang, dan pada harga bilangan Mach diatas 1.0 Mach harga CD akan semakin kecil dengan bertambahnya harga bilangan Mach. Pada dua
ke depan dan ke belakang. Roket Polyot pada konfigurasi ke depan memiliki harga CD0 yang lebih kecil daripada roket Polyot pada konfigurasi ke belakang.
Pada gambar 4.6 dan 4.8 terlihat bahwa harga CL akan semakin besar dengan
bertambahnya harga sudut serang, begitu pula dengan bertambahnya harga bilangan Mach. Melalui dua grafik di atas juga dapat dilihat bahwa pada roket Polyot dengan konfigurasi ke depan harga CL akan semakin besar, namun di atas sudut serang 140
harga CL pada konfigurasi ke belakang meningkat hingga melampaui harga CL pada
konfigurasi roket Polyot ke depan.
4.3.3 Karakteristik CM terhadap Bilangan Mach dengan Sudut
Serang Konstan
Berikut ditampilkan variasi harga CM terhadap bilangan Mach dengan rentang
harga dari 0.1 hingga 0.8. Pemvariasian ini dilakukan pada harga sudut serang konstan 50 dan pada ketinggian 11000 m.
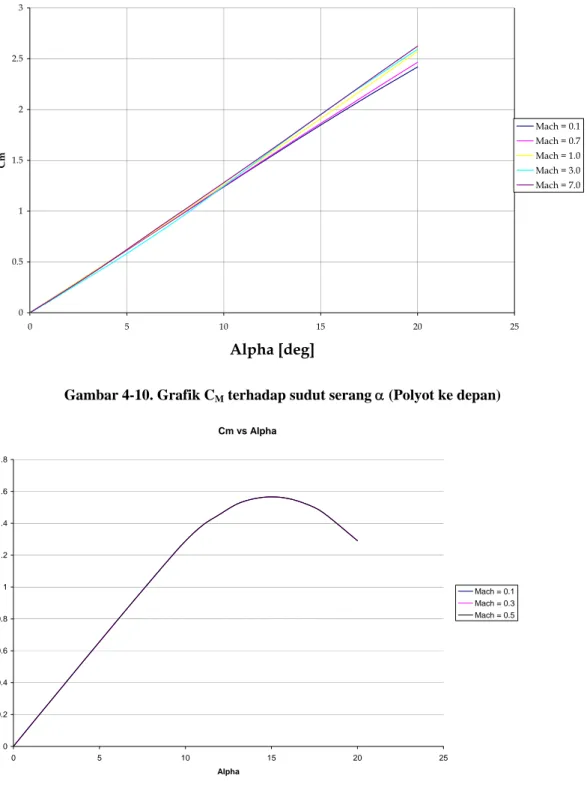
Cm-Ma 0 0.5 1 1.5 2 2.5 3 0.00 1.00 2.00 3.00 4.00 5.00 6.00 7.00 8.00 9.00 Ma Cm Alpha = 5 deg Alpha = 10 deg Alpha = 20 deg
Gambar 4-9. Grafik CM terhadap bilangan Mach (α konstan)
Pada gambar 4.9 di atas dapat dilihat bahwa harga CM cenderung konstan
terhadap perubahan harga bilangan Mach. Terlihat pula bahwa harga CM semakin
4.3.4 Karakteristik CM terhadap Sudut Serang dengan Bilangan Mach Konstan
Berikut ditampilkan variasi harga CM terhadap harga sudut serang dengan
rentang 0 hingga 20 derajat. Pemvariasian dilakukan pada beberapa harga bilangan Mach dan pada ketinggian terbang 11000 m.
Cm-Alpha 0 0.5 1 1.5 2 2.5 3 0 5 10 15 20 25 Alpha [deg] Cm Mach = 0.1 Mach = 0.7 Mach = 1.0 Mach = 3.0 Mach = 7.0
Gambar 4-10. Grafik CM terhadap sudut serang α (Polyot ke depan) Cm vs Alpha 0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 0 5 10 15 20 25 Alpha CM Mach = 0.1 Mach = 0.3 Mach = 0.5
Pada gambar 4.10 dan 4.11 dapat dilihat bahwa harga CM akan semakin besar
dengan bertambahnya harga sudut serang dan perbedaan yang terjadi akibat perbedaan harga bilangan Mach sangat kecil. Namun pada konfigurasi roket Polyot ke belakang harga CM akan semakin kecil dengan bertambahnya sudut serang pada harga
sudut serang di atas 150. Hal tersebut menunjukkan bahwa di atas sudut serang 150 roket Polyot pada konfigurasi ke belakang stabil statik. Sedangkan roket Polyot menghadap ke depan akan selalu berada pada kondisi tak stabil statik.
4.4 Pemodelan Koefisien Gaya dan Momen Aerodinamika
Secara umum, koefisien gaya dan momen aerodinamika merupakan fungsi tinggi terbang (h), bilangan Reynold (Re), bilangan Mach (Ma) dan sudut serang (α). Hubungan ini dapat dinyatakan sebagai berikut:(
h,Re,Ma,α)
f CL = (4-1)(
h,Re,Ma,α)
f CD = (4-2)(
h,Re,Ma,α)
f CM = (4-3)Ketiga fungsi tersebut di atas dapat dinyatakan dalam bentuk yang lebih baik, dengan mengasumsikan bahwa koefisien gaya dan momen aerodinamika hanya dipengaruhi oleh bilangan Mach dan sudut serang. Maka koefisien gaya dan momen aerodinamika dapat dimodelkan dalam bentuk persamaan polinomial dalam fungsi sudut serang (α) [Ref. 15], yaitu:
( )
( )
( )
( )
3 3 2 2 1 0 Ma C Maα C Maα C Maα C CD = D + D + D + D (4-4)( )
Maα C CL = L1 (4-5)( )
Ma C( )
Maα C CM = M0 + M1 (4-6)Ketika roket terbang dalam daerah hipersonik (Ma > 3), koefisien gaya dan momen aerodinamika tidak akan terpengaruh oleh pertambahan bilangan Mach [Ref. 15]. Model aerodinamika roket saat terbang dalam daerah hipersonik dapat dituliskan sebagai berikut: 2 2 0 Dα D D C C C = + (4-7) α α α C C C = + (4-8)
Berikut hasil regresi polinomial pangkat tiga untuk koefisien gaya aerodinamika, yaitu gaya angkat dan gaya hambat, serta untuk koefisien momen aerodinamika. Regresi dilakukan pada grafik koefisien gaya dan momen aerodinamika terhadap sudut serang untuk bilangan Mach konstan, sesuai dengan asumsi yang disebutkan di atas.
Pemodelan hasil regresi koefisien gaya hambat, gaya angkat dan momen aerodinamika didasarkan pada persamaan koefisien gaya dan momen aerodinamika pada masing-masing persamaan (dari (4-4) hingga (4-9)).
Tabel 4-3. Persamaan polinomial CD
Mach Polinomial 0.1 y = 6.9999x3 + 1.4115x2 + 0.0445x + 0.1045 0.9 y = 6.9999x3 + 1.4115x2 + 0.0445x + 0.1045 1.0 y = 9.4089x3 + 1.1239x2 + 0.0558x + 0.151 3.0 y = 2.757x3 + 7.1243x2 - 0.5396x + 0.1388 7 y = 10.074x3 + 2.5986x2 + 0.0231x + 0.1143
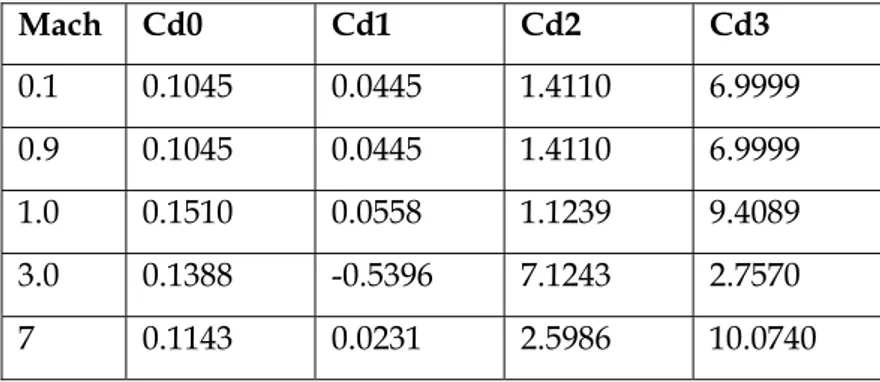
Tabel 4-4. Koefisien Polinomial CD
Mach Cd0 Cd1 Cd2 Cd3 0.1 0.1045 0.0445 1.4110 6.9999 0.9 0.1045 0.0445 1.4110 6.9999 1.0 0.1510 0.0558 1.1239 9.4089 3.0 0.1388 -0.5396 7.1243 2.7570 7 0.1143 0.0231 2.5986 10.0740
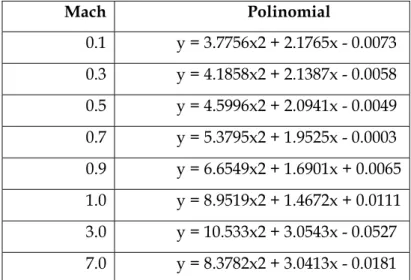
Tabel 4-5. Persamaan polinomial CL Mach Polinomial 0.1 y = 3.7756x2 + 2.1765x - 0.0073 0.3 y = 4.1858x2 + 2.1387x - 0.0058 0.5 y = 4.5996x2 + 2.0941x - 0.0049 0.7 y = 5.3795x2 + 1.9525x - 0.0003 0.9 y = 6.6549x2 + 1.6901x + 0.0065 1.0 y = 8.9519x2 + 1.4672x + 0.0111 3.0 y = 10.533x2 + 3.0543x - 0.0527 7.0 y = 8.3782x2 + 3.0413x - 0.0181
Tabel 4-6. Koefisien polinomial CL
Mach Cl0 Cl1 Cl2 0.1 0.0003 0.0211 -0.0016 0.3 0.0004 0.0211 -0.0017 0.5 -0.0001 0.0208 -0.0018 0.7 -0.0001 0.02 -0.0019 0.9 -0.0002 0.0158 -0.002 1.0 -0.0005 0.013 -0.0025 3.0 -0.0102 0.0216 0.0074 7.0 -0.0021 0.0400 0.0042
Tabel 4-7. Persamaan dan koefisien polinomial CM
Mach Polinomial Cm0 Cm1 0.1 y = 6.9987x + 0.0077 0.0119 0.1634 0.3 y = 7.0286x + 0.0057 0.0063 0.2042 0.5 y = 7.0595x + 0.0034 0.0057 0.2062 0.7 y = 7.1016x - 3E-05 0.0044 0.2097 0.9 y = 7.1697x - 0.0056 0.004 0.2138 1.0 y = 7.3753x - 0.0186 0.0042 0.2248