JREC
Journal of Electrical and Electronics Vol 2. No.2
JREC Journal of Electrical and Electronics
SISTEM PENGAMAN PERLINTASAN KERETA API DENGAN TAMPILAN
SEVEN SEGMENT
Muhammad Deny, Setyo Supratno dan Seta Samsiana Program Studi Teknik Elektro
Universitas Islam ‟45 Bekasi Jl.Cut Meutia No.83, 17113 Telp: 021- 88344436, 021- 8802015 Ext. 124
ABSTRAK
Sistem pengaman perlintasan kereta api dengan tampilan seven segment adalah salah satu upaya perbaikan sistem keamanan pada perlintasan kereta api dengan menampilkan waktu kedatangan kereta api. Terdiri dari beberapa blok rangkaian diantaranya sistem minimum ATMega 8535, sensor infra merah, motor servo dan seven segment. Dengan memberikan informasi kepada pengguna perlintasan berupa waktu kedatangan kereta api diharapkan mampu menambah sikap disiplin dan berhati hati saat melintasi perlintasan kereta api. Dengan menggunakan konsep kecepatan waktu kedatangan kereta api yang ditampilkan oleh seven segment adalah waktu kedatangan kereta api menuju palang perlintasan. Kata kunci: Perlintasan Kereta Api, ATMega 8535, Motor Servo, Seven Segment.
ABSTRACT
Railway crossing safety system with seven segment display is one of the efforts to improve the security system at railway crossings to display train arrival time. Consists of several circuit blocks including minimum system ATMega 8535, infrared sensors, servo motors and seven segment. By providing information to users in the form of crossing the train arrival train is expected to add discipline and be careful when crossing the railway crossings. By using the concept of the speed of the train arrival time shown by a seven segment is the arrival time of the train to the crossing bars.
Keyword: Railway crossing, ATMega 8535, Servo motors, seven segment.
PENDAHULUAN Latar Belakang Masalah
Pertumbuhan jumlah kendaraan bermotor yang semakin meningkat tidak diimbangi dengan pertumbuhan sarananya yaitu jalan raya, hal ini yang membuat masalah kemacetan belum juga dapat teratasi. Karena kemacetan membuat pengguna jalan melakukan apapun untuk dapat mencapai tujuan sesuai target. Peristiwa ini mempengaruhi sikap pengguna jalan pada perlintasan kereta api dimana pengguna jalan kurang memperhatikan keselamatan bagi dirinya sendiri ataupun orang lain. Banyak pengguna jalan menerobos palang pintu perlintasan karena alasan terburu – buru atau karena alasan kereta masih jauh walaupun palang pintu telah menutup. Dua faktor tersebut yang banyak menyebabkan kecelakaan pada perlintasan kereta api. Selain faktor teknis dan human error. Berdasarkan permasalahan diatas, dibutuhkan suatu cara atau sistem agar perlintasan kereta api menjadi lebih efektif demi keselamatan para pengguna jalan. Cara tersebut adalah “sistem pengaman
JREC
Journal of Electrical and Electronics Vol 2. No.2
JREC Journal of Electrical and Electronics memberikan keamanan dan keselamatan bagi pengguna jalan sehingga mengurangi tingkat
kecelakaan.
Mengacu pada latar belakang permasalahan yang ada, maka rumusan masalah ditekankan bagaimana cara merancang suatu sistem untuk keamanan perlintasan kereta api yang mudah dimengerti pengguna jalan dan dapat memberitahukan kedatangan kereta api secara otomatis dan tepat waktu.
Pembatasan masalah pada penelitian ini adalah perancangan sistem kedatangan kereta secara otomatis dan tepat waktu ini menggunakan mikrokontrol ATMega 8535 dengan pemrograman Code Vision AVR sebagai perangkat lunak dan beberapa rangkaian modul jadi yang siap pakai diantaranya dual seven segment sebagai media tampilan pada alat simulasi perlintasan kereta api dua arah sebagai perangkat keras.Adapun tujuan dari pembuatan sistem ini adalah merancang sistem pengaman perlintasan kereta api secara otomatis yang dapat memantau waktu kedatangan kereta secara realtime dengan tampilan seven segment sehingga dapat mengurangi tingkat kecelakaan pada perlintasan kereta api.Jika penelitian ini tercapai, penulis berharap penelitian ini dapat memberikan beberapa manfaat, diantaranya adalah Menambah pengetahuan dan ketrampilan bagi peneliti dalam mengimplementasikan sistem pengaman perlintasan kereta api dengan tampilan seven segment sehingga mampu mengurangi tingkat kecelakaan. Selain itu juga memperbaiki sistem pengaman perlintasan kereta api dengan memberikan informasi waktu kedatangan kereta untuk sampai pada perlintasan secara realtime.
LANDASAN TEORI
Mikrokontrol ATMega 8535
Mikrokontroler adalah IC yang dapat diprogram berulang kali, baik ditulis atau dihapus (Agus Bejo, 2007). Biasanya digunakan untuk pengontrolan otomatis dan manual pada perangkat elektronika. Mikrokontroler AVR (Alf and Vegard‟s Risc processor) ATmega8535 yang menggunakan teknologi RISC dimana program berjalan lebih cepat karena hanya membutuhkan satu siklus clock untuk mengeksekusi satu instruksi program. Mikrokontroler AVR ATmega 8535 memiliki fitur yang cukup lengkap. Mikrokontroler AVR ATmega 8535 telah dilengkapi dengan ADC internal, EEPROM internal, Timer/Counter, PWM, analog comparator, dll (M.Ary Heryanto, 2008). Sehingga dengan fasilitas yang lengkap ini memungkinkan kita belajar mikrokontroler keluarga AVR dengan lebih mudah dan efisien, serta dapat mengembangkan kreativitas penggunaan mikrokontroler ATmega8535.
Fitur ATMega 8535
Fitur yang tersedia pada ATMega 8535 adalah :
Frekuensi clock maksimum 16 MHz
JREC
Journal of Electrical and Electronics Vol 2. No.2
JREC Journal of Electrical and Electronics
Analog to Digital Converter 10 bit sebanyak 8 input
Timer/Counter sebanyak 3 buah
CPU 8 bit yang terdiri dari 32 register
Watchdog Timer dengan osilator internal
SRAM sebesar 512 byte
Memori Flash sebesar 8 Kbyte dengan kemampuan read while write
Interrupt internal maupun eksternal
Port komunikasi SPI
EEPROM sebesar 512 byte yang dapat diprogram saat operasi
Analog Comparator
Komunikasi serial standar USART dengan kecepatan maksimal 2,5 Mbps ( Soebakti, 2007 ).
Konfigurasi Pin ATMega 8535
Konfigurasi pin dari mikrokontroler ATMega8535 sebanyak 40 pin DIP (Dual Inline Package) ditunjukkan pada gambar 1.
1 2 3 4 5 6 7 8 9 11 10 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 PA0 PA1 PA2 PA3 PA4 PA5 PA6 PA7 PB0 PB1 PB2 PB3 PB4 PB5 PB6 PB7 PD0 PD1 PD2 PD3 PD4 PD5 PD6 PD7 PC7 PC6 PC5 PC4 PC3 PC2 PC1 PC0 (ADC0) (ADC1) (ADC2) (ADC3) (ADC4) (ADC5) (ADC6) (ADC7) (TOSC1) (TOSC2) (OC2) (SCL) (SDA) (XCK/T0) (T1) (INT2/AIN0) (OC0/AIN1) (SS) (MOSI) (MISO) (SCK) RESET VCC GND XTAL2 XTAL1 (RXD) (TXD) (INT0) (INT1) (OC1B) (OC1A) (ICP1) AREF GND AVCC
Gambar 1. Konfigurasi Pin ATMega 8535 Sumber : Syahrul, 2012.
Peta Memori ATMega 8535
ATMega8535 memiliki dua jenis memori yaitu Data Memori dan Program Memori ditambah satu fitur tambahan yaitu EEPROM Memori untuk penyimpan data.
JREC
Journal of Electrical and Electronics Vol 2. No.2
JREC Journal of Electrical and Electronics ATMega 8535 memiliki On-Chip In-System Reprogrammable Flash Memory sebesar 8Kbytes untuk
menyimpan program. Untuk alasan keamanan, program memori dibagi menjadi dua bagian yaitu Boot Flash Section dan Application Flash Section. Boot Flash Section digunakan untuk menyimpan program Boot Loader, yaitu program yang harus dijalankan pada saat AVR reset atau pertama kali diaktifkan. Application Flash Section digunakan untuk menyimpan program aplikasi yang dibuat user.
b. Data Memory
Memori data dibagi menjadi tiga yaitu :
1. Terdapat 32 register keperluan umum ( General Purpose Register – biasa disebut register file didalam teknologi RISC ).
2. Terdapat 64 register untuk keperluan input / output ( I/O register ). 3. Terdapat 512 byte SRAM internal. Selain itu, terdapat pula EEPROM
512 byte sebagai memori data yang dapat diprogram saat beroperasi. c. EEPROM Data Memory
ATMega8535 memiliki EEPROM 8 bit sebesar 512 byte ( $000-$1FF) untuk menyimpan data. Lokasinya terpisah dengan sistem address register, data register dan control register yang dibuat khusus untuk EEPROM.
Sistem Minimum AVR ATMega 8535
Sistem minimum mikrokontroler adalah sistem elektronika yang terdiri dari komponen-komponen dasar yang dibutuhkan oleh suatu mikrokontroler untuk dapat berfungsi dengan baik. Pada umumnya, suatu mikrokontroler membutuhkan dua elemen (selain power supply) untuk berfungsi: Kristal Oscillator (XTAL) , dan Rangkaian RESET.
Pada sistem minimum AVR khususnya
ATMEGA8535, terdapat elemen tambahan (optional), yaitu rangkaian pengendali ADC:
AGND (= GND ADC), AVCC (= VCC ADC), dan AREF (=Tegangan Referensi ADC).
DI-Basic AVR System adalah modul sistem AVR yang berdasar pada sistem minimum AVR
JREC
Journal of Electrical and Electronics Vol 2. No.2
JREC Journal of Electrical and Electronics Gambar 2. DI – Basic AVR System ATMega 8535
Sumber : http://depokinstruments.com
Motor Servo
Motor servo adalah sebuah alat yang dapat mengubah energi listrik menjadi energi mekanik yang dilengkapi rangkaian kendali dengan sistem closed feedback yang terintegrasi dalam motor tersebut. Motor servo terdiri dari sebuah motor DC, serangkaian gear, sebuah potensiometer, sebuah output shaft dan sebuah rangkaian kontrol elektronik. Didalam motor servo terdapat potensiometer yang digunakan sebagai sensor posisi. Potensiometer tersebut dihubungkan dengan output shaft untuk mengetahui posisi aktual shaft. Ketika motor dc berputar, maka output shaft juga berputar dan sekaligus memutar potensiometer. Rangkaian kontrol kemudian dapat membaca kondisi potensiometer tersebut untuk mengetahui posisi aktual shaft. Jika posisinya sesuai dengan yang diinginkan, maka motor dc akan berhenti.
Jenis Motor Servo DC
Jenis motor servo DC ada 2 yaitu motor servo DC continuous dan motor servo DC standar. Kedua jenis motor servo DC ini tidak jauh berbeda, perbedaan dari dua jenis motor servo ini terletak pada putarannya. Berikut ini adalah penjelasan kedua jenis motor servo tersebut:
a. Motor Servo DC Standar 1800
Motor servo jenis standar mampu bergerak dua arah (CW dan CCW) dengan masing-masing sudut mencapai 90° sehingga total sudut dari kanan, tengah, dan kiri adalah 180º.
b. Motor Servo Continuous
Yaitu motor servo yang mampu bergerak CW dan CCW tanpa batasan sudut operasi (berputar secara kontinyu).
Gambar 3. Konstruksi Motor Servo Sumber : http://www.servocity.com
JREC
Journal of Electrical and Electronics Vol 2. No.2
JREC Journal of Electrical and Electronics Infra Red Transmitter merupakan suatu modul pengirim data melalui gelombang infra merah dengan
frekuensi carrier sebesar 38 kHz. Modul ini dapat difungsikan sebagai output dalam aplikasi transmisi data nirkabel seperti robotik, sistem pengaman, datalogger, absensi, dan sebagainya. Infrared atau infra merah merupakan sebuah radiasi elektromagnetik dimana cahaya gelombang lebih panjang dari cahaya tampak, tetapi juga lebih pendek dari radiasi gelombang radio. Infrared memiliki karakteristik tersendiri yaitu tidak bisa dilihat oleh manusia, tidak dapat menembus materi yang tidak tembus pandang, infrared bisa ditimbulkan oleh komponen yang menghasilkan panas dan terakhir panjang gelombang pada infrared memiliki hubungan yang berlawanan alias berbanding terbalik dengan suhu. Misal, ketika suhu mengalami kenaikan maka panjang gelombang akan menurun( Innovative Electronics, 2005 ).
Infrared Receiver
Infra Red Receiver merupakan suatu modul penerima data melalui gelombang infra merah dengan frekuensi carrier sebesar 38 kHz. Modul ini dapat difungsikan sebagai input dalam aplikasi transmisi data nirkabel seperti robotik, sistem pengaman, data logger, absensi, dan sebagainya.
Diffuse Reflection IR Switch Sensor
Switch ini merupakan fotolistrik menggabungkan pemancar dan penerima dalam satu unit, cahaya yang dipancarkan oleh pemancar ini tercermin dari objek target dan penerima mengevaluasi ini memantulkan cahaya. Keuntungan dari metode ini adalah bahwa tidak ada reflektor diperlukan. Sebagai kedekatan beralih mengevaluasi cahaya yang dipantulkan dan energi , kisaran pemindaian sensor konvensional (juga disebut sensor optik energik) tergantung untuk sebagian besar pada warna dari objek target dan pada permukaannya.
Seven Segment Display
Seven segment display adalah sebuah rangkaian yang dapat menampilkan angka-angka desimal
maupun heksadesimal. Seven segment display biasa tersusun atas 7 bagian yang setiap bagiannya merupakan LED (Light Emitting Diode) yang dapat menyala. Jika 7 bagian diode ini dinyalakan dengan aturan yang sedemikian rupa, maka ketujuh bagian tersebut dapat menampilkan sebuah angka heksadesimal.
Buzzer
JREC
Journal of Electrical and Electronics Vol 2. No.2
JREC Journal of Electrical and Electronics tegangan input maka buzzer akan mengeluarkan bunyi. Frekuensi suara yang dikeluarkan oleh buzzer
yaitu antara 1 – 5 KHz ( Albert Paul, Prinsip – Prinsip Elektronika, 1989 hal : 134 ).
LED ( Light Emitting Diode )
LED (Light Emitting Diode) adalah dioda yang memancarkan cahaya apabila dialiri oleh aliran listrik.
Konsep Kecepatan
Menurut Hallay dkk. (1985:45), kecepatan partikel adalah laju (rate) perubahan posisi terhadap waktu. Kecepatan didefinisikan sebagai cepat lambatnya perubahan kedudukan benda terhadap waktu. Suatu benda (titik) dikatakan bergerak apabila vektor posisi terhadap acuan tertentu selalu berubah untuk setiap saat. Secara matematis kecepatan rata – rata dituliskan sebagai :
Kelajuan Rata – rata dan Kecepatan Rata – rata
Istilah “kelajuan” atau “laju” menyatakan seberapa jauh sebuah benda bergerak dalam selang waktu tertentu.
Secara matematis ditulis :
Dengan :
= laju rata – rata (m/s)
s = jarak total yang ditempuh (m) t = waktu tempuh yang diperlukan (s)
Kecepatan digunakan untukmenyatakan baik besar (nilai numerik) mengenai seberapa cepat sebuah benda bergerak maupun arah geraknya. Dengan demikian, kecepatan merupakan besaran vektor. Ada perbedaan kedua antara laju dan kecepatan, yaitu kecepatan rata-rata didefinisikan dalam hubungannya dengan perpindahan, dan bukan dalam jarak total yang ditempuh.
Dengan :
JREC
Journal of Electrical and Electronics Vol 2. No.2
JREC Journal of Electrical and Electronics = interval waktu yang diperlukan (s)
METODOLOGI PENELITIAN
Objek Penelitian
Langkah – langkah kerja yang dilakukan untuk mempermudah proses penelitian dapat dilihat dalam flowchart metodologi penelitian sebagai berikut :
Start Studi pustaka Perancangan sistem Perancangan hardware Ok Alat dan bahan
Pengujian hardware
No
JREC
Journal of Electrical and Electronics Vol 2. No.2
JREC Journal of Electrical and Electronics Sistem Pengaman Perlintasan Kereta Api Stop Ok Perancangan software Pengujian software No Yes 1
Gambar 4. Flowchart Metodologi Penelitian
Penelitian sistem pengaman perlintasan kereta api dengan tampilan seven segment ini penulis menggunakan metodologi penelitian yang bersifat kualitatif yaitu sebagai berikut:
1. Studi pustaka
Berupa pengumpulan data yang didapat dari buku – buku, internet, modul pelatihan, dan jurnal serta literatur lain yang berkaitan dengan permasalahan.
2. Perancangan sistem
Berupa pembuatan alat untuk simulasi sistem pengaman perlintasan kereta api dengan tampilan seven segment.
Alat dan Bahan Penelitian
Alat dan bahan yang digunakan oleh penulis dalam merancang sistem pengaman perlintasan kereta api dengan tampilan seven segment terdiri dari 2 bagian yaitu :
c. Perancangan Perangkat Keras (hardware) d. Perancangan Perangkat Lunak (software)
JREC
Journal of Electrical and Electronics Vol 2. No.2
JREC Journal of Electrical and Electronics Detail teknis ini adalah menentukan sistem kerja secara keseluruhan kemudian merinci tiap – tiap
bagian sistem tersebut secara detail.
Sistem pengaman perlintasan kereta api dengan tampilan seven segment secara umum digambarkan sebagai berikut : Sistem Minimum ATMega 8535 Power Supply Sensor Seven Segment Motor Servo Buzzer Lampu Indikator
Gambar 5. Blok Diagram Sistem Pengaman Perlintasan Kereta Api Dengan Tampilan Seven Segment
Perancangan Perangkat Lunak ( Software )
Perancangan perangkat lunak terdiri dari : Perancangan flowchart mikrokontrol Perancangan program mikrokontrol.
Perancangan Flowchart Mikrokontrol.
JREC
Journal of Electrical and Electronics Vol 2. No.2
JREC Journal of Electrical and Electronics
Start
Menghitung waktu
Palang pintu menutup
Buzzer berbunyi
Lampu indikator merah OK Deteksi sensor 1 YES NO Inisialisasi Deteksi sensor 2 Menampilkan waktu (Count. Down) Deteksi sensor 3
Palang pintu terbuka
Buzzer off
Lampu indikator hijau
Stop OK
YES NO
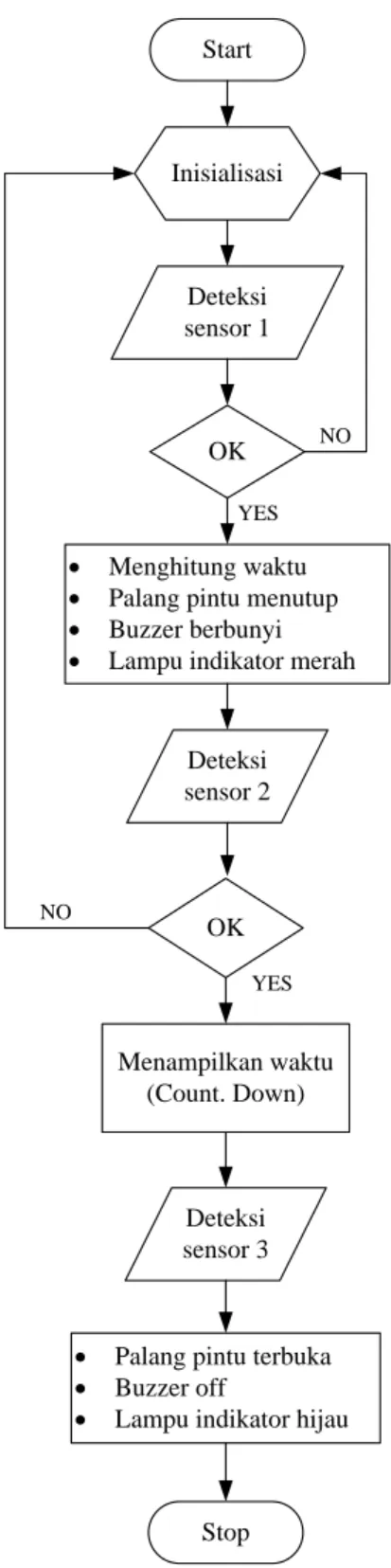
Gambar 6. Flowchart Sistem Pengaman Perlintasan Kereta
JREC
Journal of Electrical and Electronics Vol 2. No.2
JREC Journal of Electrical and Electronics Sistem pengaman perlintasan kereta api dengan tampilan seven segment dibuat dengan tujuan
memantau kedatangan kereta api yang akan melintas dengan menampilkan waktu secara real time sehingga pengguna jalan akan lebih berhati hati untuk melintasi rel kereta api. Apabila sensor 1 mendeteksi kereta, maka mikrokontrol akan mulai menghitung waktu tempuh kereta api hingga sampai kereta api terdeteksi oleh sensor ke-2 diiringi dengan dengan buzzer yang mulai berbunyi, palang pintu menutup serta lampu indikator yang mengisyaratkan keadaan tidak aman. Setelah sensor 2 mendeteksi kereta api maka seven segment akan menampilkan waktu kedatangan kereta api dengan hitungan mundur (countdown), ini akan berlangsung sampai kereta api melewati palang pintu perlintasan, setelah melewati palang pintu kemudian kereta api akan terdeteksi oleh sensor 3 yang akan memerintahkan palang pintu untuk membuka setelah kereta api melewati sensor 3 selama 5 detik, buzzer berhenti dan lampu indikator mengisyaratkan keadaan aman. Hal yang demikian berlaku untuk perlintasan kereta satu jalur dan satu waktu. Untuk kasus perlintasan dua jalur berlawanan dalam satu waktu maka sistem kerjanya hampir sama dengan sebelumnya akan tetapi dalam menampilkan waktu hanya berlaku untuk kereta yang pertama kali terdeteksi oleh sensor 1 dan untuk membuka palang pintu, memberhentikan buzzer serta menyalakan indikator keadaan aman maka mikrokontrol akan mengacu pada kereta yang terakhir melintas. Untuk lebih memahami analisa dari sistem ini berikut merupakan hasil rancangan koneksi dari semua rangkaian.
Gambar 7. Koneksi Rangkaian Sistem Pengaman Perlintasan Kereta Api Dengan Tampilan Seven Segment
JREC
Journal of Electrical and Electronics Vol 2. No.2
JREC Journal of Electrical and Electronics Berikut merupakan alat simulasi sistem pengaman perlintasan kereta api dengan tampilan seven
segment yang telah dibuat :
Gambar 8. Alat Simulasi Sistem Pengaman Perlintasan Kereta Api dengan Tampilan Seven Segment Berdasarkan analisa dan pengamatan maka sistem kerja dari simulasi alat ini adalah berdasarkan kecepatan kereta yang akan melintas sehingga digunakan prinsip kecepatan kendaraan. Maka dari itu dapat dituliskan rumus dari kecepatan adalah sebagai berikut :
Dimana :
V = Kecepatan ( km/jam, m/s ) S = Jarak yang ditempuh ( km, m ) T = Waktu tempuh ( jam, sekon )
Menentukan jarak untuk mencari kecepatan.
JREC
Journal of Electrical and Electronics Vol 2. No.2
JREC Journal of Electrical and Electronics Gambar 9. Penentuan Jarak Pada Sensor Untuk Rel Kereta A
Gambar diatas menjelaskan bahwa untuk mendapatkan waktu kedatangan kereta maka terlebih dahulu ditentukan jarak S1 yaitu jarak sensor 1 dan sensor 2 untuk mendapatkan kecepatan.
V = Kecepatan kereta ( m/s )
S1 = Jarak sensor 1 dengan sensor 2 ( m )
∆t = Waktu tempuh kereta untuk sampai dari sensor 1 ke sensor 2 ( sekon )
Pada alat simulasi ini telah ditentukan jarak S1 yaitu 13,5 cm atau sama dengan 0,135 m.
Menentukan jarak untuk mendapatkan waktu.
Setelah didapatkan kecepatan kereta maka dapat diketahui waktu kedatangan kereta dengan menentukan jarak S2 yaitu jarak sensor 2 dengan batas perlintasan (palang pintu).
t = Waktu kedatangan kereta untuk sampai ke palang pintu ( sekon ) S = Jarak sensor 2 dengan batas perlintasan / palang pintu ( m ) V = Kecepatan kereta ( m/s )
Menurut uraian rumus diatas maka “t” inilah yang akan ditampilkan pada seven segment sebagai waktu kedatangan kereta. Yaitu waktu kedatangan kereta mulai dari sensor 2 sampai batas perlintasan atau palang pintu. Kebenaran sistem dapat dilihat dari tabel pengujian perbandingan antara perhitungan dengan pengukuran pada alat simulasi.
Tabel 1. Hasil Perhitungan dan Pengukuran Sistem
Percobaan Perhitungan Pengukuran
∆t (s) V(m/s) t (s) ∆t (s) t (s)
1 10 0,0135 7,037 10 7
2 15 0,009 10,5 15 10
JREC
Journal of Electrical and Electronics Vol 2. No.2
JREC Journal of Electrical and Electronics
4 25 0,0054 17,59 25 17 5 30 0,0045 21,11 30 21 6 35 0,003857 24,52 35 24 7 40 0,003375 28,14 40 28 8 50 0,0027 35,18 50 35 9 60 0,00225 42,22 60 42 10 70 0,00192 49,47 70 49
Tabel diatas merupakan hasil dari perhitungan berdasarkan rumus yang digunakan penulis untuk mendapatkan waktu kedatangan kereta (t). Sedangkan pengukuran merupakan hasil uji coba alat simulasi dengan 10 kali percobaan untuk melihat waktu yang ditampilkan seven segment
.
Berdasarkan formula diatas maka perbandingan waktu dari hasil perhitungan dan pengukuran sistem dapat dilihat pada grafik sebagai berikut:
0 10 20 30 40 50 60 10 15 20 25 30 35 40 50 60 70
W
akt
u
ke
da
ta
ng
an
ke
re
ta
Waktu tempuh kereta dari S1 ke S2
Grafik Perbandingan Waktu Kedatangan Kereta
t (s) Perhitungan t (s) Pengukuran
Gambar 10. Grafik Perbandingan Hasil Perhitungan dengan Hasil pengukuran Waktu Kedatangan Kereta.
JREC
Journal of Electrical and Electronics Vol 2. No.2
JREC Journal of Electrical and Electronics
SIMPULAN
Menurut hasil penelitian yang telah dilakukan maka dapat disimpulkan :
1. Konsep kecepatan digunakan untuk mendapatkan waktu kedatangan kereta dengan menetapkan jarak sensor sebagai data untuk perhitungan.
2. Perancangan sistem perlintasan kereta api dengan tampilan seven segment menghasilkan: a. Penampil waktu yang sesuai antara perhitungan dengan pengukuran pada percobaan
simulasi.
b. Perbedaan nilai yang dihasilkan untuk waktu penampil pada range tertentu masih masuk 60% dari nilai toleransi.
c. Selain seven segment sebagai penampil, motor servo, buzzer serta lampu indikator bekerja sesuai perancangan.
3. Simulasi yang dilakukan pada percobaan penelitian diasumsikan bahwa kecepatan kereta adalah konstan.
1. Apabila terjadi kasus percepatan pada kereta api maka hal ini tidak akan mempengaruhi sistem kerja pada seven segment sebagai penampil real time yang sudah disetting pada kecepatan konstan.
SARAN
Kekurangan pada sistem ini dapat diperbaiki pada penelitian selanjutnya maka beberapa hal dibawah ini dapat dijadikan referensi pemikiran, diantaranya yaitu :
1. Pembuatan miniatur dapat memperlihatkan keadaan sebenarnya untuk simulasi yang lebih baik.
2. Perlu dilakukan penelitian lebih lanjut terutama jika diterapkan pada keadaan yang sebenarnya.
JREC
Journal of Electrical and Electronics Vol 2. No.2
JREC Journal of Electrical and Electronics
DAFTAR PUSTAKA
Ali,Muhammad.,dkk.2013.Modul Proteus Profesional untuk Simulasi Rangkaian Digital.Program Pengabdian Masyarakat Universitas Negri Yogyakarta.
Arifianto,Deni.2011.Kamus Komponen Elektronika.2011.Jakarta:Kawan Pustaka.
Fristiyan,Jerry,B.2013.Pemantauan PLTS Rumah Tangga Berbasis Mikrokontrol PIC 16F877 Dengan User Interface Visual Basic 6.0.Laporan Skripsi Teknik Elektro.Universitas Islam “45”. Halliday,D.,dan Resnick,R.1985.Fisika.Jakarta:Erlangga.
Heryanto,Ary,M., dan Adi,Wisnu,P.2008.Pemrograman Bahasa C Untuk Mikrokontroler ATMega 8535.Yogyakarta:Andi.
Rangkuti,Syahban.2011.Mikrokontroler Atmel AVR Simulasi dan Praktik Menggunakan ISIS Proteus dan Code Vision AVR.Bandung:Informatika Bandung.
Soebakti,Hendawan.,2007.Basic AVR Microcontroller Tutorial.Laporan.Politeknik Batam.
Syahrul.2012.Mikrokontroler AVR ATMega 8535 Menjelajahi: Prinsip – prinsip, Antar Muka, dan Aplikasi Mikrokontroler dengan Assembler (Bahasa Rakitan).Bandung:Informatika Bandung. Wardhana,Lingga.2006.Belajar Sendiri Mikrokontroler AVR Seri ATMega 8535 Simulasi, Hardware,