OTOMATIS DENGAN
WARNING ALARM
BERBASIS
MIKROKONTROLER
SKRIPSI
Disusun oleh :
M ZAINUDIN FITRO
NPM. 0834010032
J URUSAN TEKNIK INFORMATIKA
FAKULTAS TEKNOLOGI INDUSTRI
UNIVERSITAS PEMBANGUNAN NASIONAL
"
VETERAN
"
J AWA TIMUR
SURABAYA
SIMULASI PENGENDALIAN PINTU AIR(
SPILWAY)
OTOMATIS DENGAN WARNING ALARM BERBASIS
MIKROKONTOLER
Disusun Oleh :
M ZAINUDIN FITRO
NPM. 0834010032
Telah disetujui untuk mengikuti Ujian Negara Lisan Periode Desember Tahun Akademik 2011/2012
Pembimbing Utama Pembimbing Pendamping
HARIANTO S.Kom, M.Eng WAHYU S.J SAPUTRA S.Kom, M.Kom NIDN. 0722087710 NPT. 3 8608 10 0295 1
Mengetahui,
Ketua J urusan Teknik Infor matika Fakultas Teknologi Industri UPN ”Veteran” J awa Timur
SIMULASI PENGENDALIAN PINTU AIR(
SPILWAY)
OTOMATIS DENGAN WARNING ALARM BERBASIS
MIKROKONTOLER
Disusun Oleh : M ZAINUDIN FITRO
NPM. 0834010108
Telah dipertahankan di hadapan dan diterima oleh Tim Penguji Skr ipsi J urusan Teknik Infor matika Fakultas Teknologi Industri
Univer sitas Pembangunan Nasional ”Veteran” J awa Timur Pada Tanggal 14 Desember 2012
Pembimbing : Tim Penguji :
Univer sitas Pembangunan Nasional ”Veteran” J awa Timur
FAKULTAS TEKNOLOGI INDUSTRI
PANITIA UJ IAN SKRIPSI / KOMPREHENSIF
KETERANGAN REVISI Mahasiswa di bawah ini :
Nama : M ZAINUDIN FITRO NPM : 0834010032
Jurusan : Teknik Informatika
Telah mengerjakan revisi/ tidak ada revisi*) pra rencana (design)/ skripsi ujian lisan periode Desember, TA 2011/2012 dengan judul:
SIMULASI PENGENDALIAN PINTU AIR(
SPILWAY)
OTOMATIS DENGAN WARNING ALARM BERBASIS
MIKROKONTOLER
Surabaya,14 Desember 2012 Dosen Penguji yang memerintahkan revisi:
1) Dr. Ir. Ni Ketut Sar i, MT NIP. 19650731 199203 2 001 2) Intan Yuniar P, S.Kom, M.Sc
NPT. 3 8006 04 0198 1 3) Ir. Kartini S.Kom, MT
NIP. 19611110 199103 2 001
Syukur Alhamdulillaahi rabbil ‘alamin terucap ke hadirat Allah SWT atas segala limpahan Kekuatan-Nya sehingga dengan segala keterbatasan waktu, tenaga, pikiran dan keberuntungan yang dimiliki penyusun, akhirnya penyusun dapat menyelesaikan Skripsi yang berjudul “Simulasi Pengendalian Pintu Air Otomatis dengan Warning Alarm berbasis Mikr okontroler” tepat waktu.
Skripsi dengan beban 4 SKS ini disusun guna diajukan sebagai salah satu syarat untuk menyelesaikan program Strata Satu (S1) pada jurusan Teknik Informatika, Fakultas Teknologi Industri, UPN ”VETERAN” Jawa Timur.
Melalui Skripsi ini penyusun merasa mendapatkan kesempatan emas untuk memperdalam ilmu pengetahuan yang diperoleh selama di bangku perkuliahan, terutama berkenaan tentang penerapan teknologi perangkat bergerak. Namun, penyusun menyadari bahwa Skripsi ini masih jauh dari sempurna. Oleh karena itu penyusun sangat mengharapkan saran dan kritik dari para pembaca untuk pengembangan aplikasi lebih lanjut.
Surabaya, 28 Desember 2012
UCAPAN TERIMA KASIH
Ucapan terima kasih ini saya persembahkan sebagai perwujudan rasa syukur atas terselesaikannya Laporan Skripsi. Ucapan terima kasih ini saya tujukan kepada : 1. Allah SWT., karena berkat Rahmat dan Hidayah-Nya penulis dapat menyusun
dan menyelesaikan Laporan Skripsi ini hingga selesai.
2. Bapak Prof. Dr. Ir. Teguh Soedarto, MP selaku Rektor Universitas Pembangunan Nasional “Veteran” Jawa Timur.
3. Bapak Sutiyono, MT selaku Dekan Fakultas Teknologi Industri UPN “Veteran” Jawa Timur.
4. Ibu Dr. Ir. Ni Ketut Sari, MT. selaku Ketua Jurusan Teknik Informatika UPN “Veteran” Jawa Timur yang telah dengan sabar membimbing dengan segala kerendahan hati dan selalu memberikan kemudahan dan kesempatan bagi saya untuk berkreasi.
5. Bapak Firza Prima Aditiawan, S.Kom., Selaku PIA Tugas Akhir Teknik Informatika UPN “Veteran” Jawa Timur.
6. Bapak Harianto, S.Kom M.Eng selaku dosen pembimbing utama pada Proyek Skripsi ini di UPN “Veteran” Jawa Timur yang telah banyak memberikan petunjuk, masukan, bimbingan, dorongan serta kritik yang bermanfaat sejak awal hingga terselesainya Skripsi ini.
8. Keluarga tercinta, terutama Bapak dan Ibuku tersayang, terima kasih atas semua doa, dukungan serta harapan-harapanya pada saat penulis menyelesaikan Skripsi dan laporan ini. Yang penulis minta hanya doa restunya, sehingga penulis bisa membuat sesuatu yang lebih baik dari laporan ini.
9. Terimakasih buat teman seperjuangan sekaligus partner yang baik selama 4 tahun berjuang bersama, Imam Anzhori, Yuliana, Joko, Doni, Hendra, Adi, dan Dian yang telah berjuang bersama sampai akhir.
DAFTAR ISI
ABSTRAK ...i
KATA PENGANTAR ...ii
DAFTAR ISI ...iv
DAFTAR GAMBAR ... viii
DAFTAR TABEL ...xi
BAB I : PENDAHULUAN ...1
1.1. Latar Belakang ...1
1.2. Rumusan Masalah ...2
1.3. Batasan Masalah...2
1.4. Tujuan Penelitian ...3
1.5. Manfaat Penelitian...3
1.6. Metodologi Penelitian ...4
1.7. Sistematika Penulisan ...5
BAB II : TINJ AUAN PUSTAKA ...7
2.1. Pengantar Pustaka ...7
2.2. Pengenalan Mikrokontroler ... ....7
2.2.1. Fitur Mikrokontroler Atmega8535 ...9
2.2.2. Arsitektur Mikrokontroler Atmega8535 ...11
2.2.3. Konfigurasi Pin Atmega8535 ...12
2.2.5. Register ...17
2.3. Motor Dc ...18
2.3.1 Prinsip cara kerja ... 20
2.3.2 Prinsip arah putaran ... .24
2.4. Timer ...25
2.5. Relay ...25
2.6. Sensor Ultrasonic ...26
2.7. LCD 16x2 Character ... 28
2.7.1 DDRAM ... .29
2.7.2 CGRAM ...29
2.7.3 CGROM ...30
2.8. Push Button ... 30
2.9. Alarm Buzzer ... 31
2.10. Resistor ... ..32
2.11. Kapasitor ... 32
2.12. Dioda ... 33
2.13. Kebutuhan Software ... .34
2.13.1 CodeVisionAVR ... .34
2.13.2 Pemilihan chip frekuensi X-tall... .38
2.13.3 Complier atau penerjemah ... .40
2.13.4 Bahasa pemrograman C... ...40
2.13.5 DT-HIQ AVR-51 USP ISP ... 41
BAB III : ANALISA DAN PERANCANGAN SISTEM ...46
3.1. Analisa Sistem ...46
3.2 Diagram blok penelitian ...47
3.2.1. Blok Input ...47
3.2.2. Blok Proses ...48
3.2.3. Blok Output ...48
3.3 Perancangan Sistem ... 48
3.3.1 Kebutuhan Perangkat Keras ... ..49
3.3.2 Kebutuhan Perangkat Lunak ... .51
3.4 Perancangan Perangkat Keras ... 52
3.4.1 Mikrokontroler Atmega8535L ... ..52
3.4.2 Rangkaian Sistem Keseluruhan ... 53
3.5 Perancangan Perangkat Lunak ... 55
3.6 Perancangan Maket... 60
BAB IV : IMPLEMENTASI SISTEM ...61
4.1. Alat-alat yang Digunakan ...61
4.1.1. Perangkat Keras ... 61
4.1.2. Perangkat Lunak ... 62
4.2. Implementasi Hardware ...62
4.2.1. Rangkaian Minimum Mikrokontroler Atmega8535.. 62
4.2.2. Implementasi Maket pintu air ... 63
4.2.3. Implementasi limit switch ... 64
4.2.5. Implementasi Motor DC ... .65
4.2.6. Implementasi Buzzer ... 66
4.2.7. Implementasi LCD ... 67
4.2.8. Push Button ... 67
4.3 Implementasi Software di Mikrokontroler ... 68
BAB V : PENGUJ IAN DAN ANALISA ...78
5.1. Pengujian Alat ... ....78
5.1.1. Uji Coba ISP MKII ...78
5.1.2. Pengujian Mikrokontroler Atmega8535L ...81
5.2. Pengujian simulasi pintu air ... .. ..81
5.3. Uji coba batas level atas ... .. ..82
5.4. Uji coba batas level bawah ... 82
5.5. Uji coba pintu Air ... .83
5.6. Analisa alat secara keseluruhan ...85
5.7. Tabel pengujian ... .86
BAB VI : PENUTUP ...87
6.1. Kesimpulan ...87
6.2. Saran ...88
DOSEN PEMBIMBING II : Wahyu S.J Saputr a, S.Kom.
ABSTRAK
Pada era globalisasi seperti saat ini perkembangan teknologi berkembang sangat pesat, salah satu perkembangan itu terjadi pada teknologi informatika, teknologi informatika banyak sekali diaplikasikan pada peralatan-peralatan elektronika yang digunakan setiap hari. Dengan kemajuan itulah di bidang ilmu pengetahuan dan teknologi menghasilkan inovasi baru yang berkembang menuju lebih baik. Bendungan air merupakan konstruksi yang dibangun untuk menahan laju air. Bendungan air memiliki pintu kanal air yang berfungsi sebagai pembuka dan penutup untuk mengalirkan maupun menahan aliran air. Sehingga sistem pintu air (spillway) pada bendungan masih menggunakan metode manual yang artinya pintu air harus selalu dijaga dan dikendalikan secara manual oleh tangan manusia.
Proses pengendalian pintu air otomatis dengan metode yang akan digunakan adalah perancangan rangkaian sensor ketinggian air dengan ultrasonic, rangkaian minimum sistem mikrokontroller Atmega8535, rangkaian driver motor DC untuk menggerakan buka-tutup pintu air, rangkaian Buzzer bunyi peringatan, rangkaian
push button dan rangkaian LCD menampilkan informasi ketinggian air. Serta didukung sofware dalam membuat program sesuai cara kerja pintu air (spillway) dan pembuatan prototype guna mendukung proses cara kerja sistem berjalan dengan semestinya.
Pada proses hasil pengujian simulasi pengendalian pintu air otomatis dengan warning alarm dilakukan dengan 4 kondisi ketinggian air yang berbeda-beda untuk mendapatkan tingkat berhasil atau tidaknya sistem yang telah dibuat tersebut. Selama 4 keadaan tersebut, sistem dinyalakan satu persatu dengan setting level atas dan level bawah dengan kondisi yang berbeda-beda agar semua jenis percobaan simulasi dapat bekerja sesuai dengan fungsinya masing-masing.
PENDAHULUAN
1.1.
Latar Belakang
Pada era globalisasi seperti saat ini perkembangan teknologi berkembang sangat pesat, salah satu perkembangan itu terjadi pada teknologi informatika, teknologi informatika banyak sekali diaplikasikan pada peralatan-peralatan elektronika yang digunakan setiap hari. Dengan kemajuan itulah di bidang ilmu pengetahuan dan teknologi menghasilkan inovasi baru yang berkembang menuju lebih baik.
Bendungan air merupakan konstruksi yang dibangun untuk menahan laju air. Bendungan air memiliki pintu kanal air yang berfungsi sebagai pembuka dan penutup untuk mengalirkan maupun menahan aliran air. Ketika tinggi air diatas standar kapasitas bendungan, maka pintu kanal air akan membuka. Sedangkan tinggi air dibawah standar kapasitas maka pintu air akan menutup. Turun naiknya tinggi air tidak dapat diperkirakan secara akurat, sehingga dibutuhkan orang untuk selalu mengontrol ketinggian debit air, serta agar waduk tempat menampung air tersebut tidak bah ataupun waduk tersebut tidak roboh. Apabila nantinya terjadi hujan deras yang mengakibatkan curah hujan tinggi sehingga tidak memenuhi daya tampung waduk tersebut, haruslah air yang ada di waduk dibuang melalui pintu-pintu air (spillway) yang ada pada waduk tersebut ke sungai-sungai yang sudah terhubung dengan pintu air (spillway).
dikendalikan secara manual oleh tangan manusia. Dengan cara manual seperti ini membutuhkan waktu untuk menuju lokasi pintu air (spillway) sehingga kurang efisien waktu. penggunaan peralatan yang seperti ini masih banyak dimungkinkan adanya kelalaian atau human error yang bisa menyebabkan bencana banjir, ataupun kekurangan persediaan air.
Berdasarkan latar belakang diatas maka penulis membuat suatu alat yang mampu mendeteksi kondisi ketinggian air , dan alat tersebut bisa mengendalikan pintu air secara otomatis. Hal inilah yang melatar-belakangi penulis untuk mengambil tema ini dalam tugas akhir yang berjudul “Simulasi Pengendalian Pintu Air (Spillway) Otomatis dengan Warning Alarm Berbasis Mikrokontroler”. (Sumber : Fakultas teknik elekto-Universitas negeri yogyakarta, http://elektronika.uny.ac.id/index.php?hhajoo=eryuuc&&uyuih=38)
1.2 Rumusan Masalah
Permasalahan umum yang dikaji berdasarkan latar belakang di atas adalah sebagai berikut :
a. Bagaimana mengendalikan pintu air (spillway) secara otomatis ? b. Bagaimana merancang sebuah perangkat berbasis mikrokontroler
yang dapat mendeteksi ketinggian air ?
1.3
Batasan Masalah
a. Sensor yang digunakan adalah sensor Ultrasonic.
b. Sistem pengendalian yang akan digunakan sebagai pengolah dan pengatur port yang difungsikan sebagai portabel data berbasis mikrokontroler ATMEGA8535.
c. Penggunaan Motor DC sebagai penggerak pintu air.
d. Alarm Buzzer sebagai bunyi peringatan akan intensitas ketinggian air. e. Penggunaan software AVR code vision untuk pembuatan program
pada mikrokontroller dengan bahasa Pemrograman C. f. Bendungan disimulasikan dalam skala kecil.
g. Penggunaan LCD untuk menampikan informasi.
h. Push button sebagai setting ketinggian level atas dan level bawah.
1.4. TUJ UAN
Tujuan dari tugas akhir ini adalah Merancang dan membangun sebuah alat pengendali dua pintu air (spillway) otomatis dengan Warning Alarm berbasis mikrokontroller.
1.5. MANFAAT
atau human error yang bisa menyebabkan bencana banjir, ataupun kekurangan persediaan air.
b. Dengan adanya Alarm Buzzer sebagai bunyi peringatan akan luapan volume air yang berlebih, sehingga efektif mengurangi kekhawatiran akan dampak bahaya banjir.
1.6. Metodologi Penelitian
Metode penelitian yang digunakan dalam pembuatan sistem mikrokontroler ini melalui percobaan langsung jika gagal maka akan terus dicoba lagi atau trayer error dan untuk melakukan penelitian tersebut, berikut tahap - tahapanya :
a. Metode Studi Literatur
Mengumpulkan referensi baik dari internet, buku maupun sumber-sumber lainnya serta mencari tools yang diperlukan untuk membuat simulasi tersebut sebagai tambahan referensi Tugas Akhir ini.
b. Metode Perancangan dan Pembuatan Aplikasi
Tahap ini merupakan tahap yang paling banyak memerlukan waktu karena model dan rancangan simulasi yang telah di buat di implementasikan dengan menggunakan media mikrokontroler.
c. Metode Uji coba alat dan evaluasi
d. Metode Kesimpulan
Pada tahap ini dalam bagian akhir pembuatan tugas akhir. Dibuat kesimpulan dan saran dari hasil pembuatan sistem simulasi yang diperoleh sesuai dengan dasar teori yang mendukung dalam pembuatan konsep tersebut yang telah dikerjakan secara keseluruhan.
e. Metode Penyusunan buku Laporan
Pada tahap ini merupakan tahap akhir dari pengerjaan Tugas Akhir. Buku ini disusun sebagai laporan dari seluruh proses pengerjaan Tugas Akhir, dari penyusunan buku ini diharapkan dapat memudahkan pembaca yang ingin menyempurnakan dan mengembangkan sistem.
1.7. Sistematika Penulisan
Dalam laporan tugas akhir ini, pembahasan disajikan dalam enam bab dengan sistematika pembahasan sebagai berikut:
BAB I : PENDAHULUAN
Bab ini berisi Latar Belakang, Rumusan Masalah, Batasan Masalah, Tujuan, Manfaat, Metodologi Penulisan, dan Sistematika Penulisan Skripsi.
BAB II : TINJ AUAN PUSTAKA
BAB III : ANALISIS DAN PERANCANGAN SISTEM
Bab ini berisi tentang perancangan sistem apa saja yang perlu dianalisis dan digunakan yang meliputi : kebutuhan data, kebutuhan hardware , kebutuhan sofware, perancangan sistem yang berbasis mikrokontroler, serta analisis dan desain sistem yang telah dibuat sebelumnya. BAB IV IMPLEMENTASI SISTEM
Bab ini menjelaskan tentang implementasi dari simulasi yang telah dibuat sebelumnya, dan ini merupakan bagian yang paling penting untuk menjawab dari permasalahan yang terjadi.
BAB V : UJ I COBA DAN ANALISIS
Bab ini menjelaskan tentang uji coba dari simulasi yang telah dibuat dan melakukan pengevaluasian terhadap program serta cara kerja apakah sesuai dengan tujuan yang dimaksud.
BAB VI : PENUTUP
Pada bab ini menjelaskan tentang kesimpulan yang diperoleh setelah dilakukan penelitian terhadap alat yang dibuat serta saran untuk pengembangan sistem selanjutnya. DAFTAR PUSTAKA
TINJ AUAN PUSTAKA
Pada bab II ini akan dibahas beberapa teori dasar untuk menunjang penyelesaian skripsi ini, antara lain: Kebutuhan Hardware, Pengenalan Mikrokontroler, Motor Dc, Timer, Relay, Push Button, LCD, Sensor Ultrasonic, Kebutuhan SofwareAVR CodeVision, Proteus 7 Profesional.
2.1 Pengantar Pustaka
Rancangan pembuatan simulasi pintu air otomatis dengan Warning Alarm pada bendungan dibutuhkan suatu kebutuhan. Kebutuhan ini menyangkut kebutuhan hardware dan kebutuhan software untuk mendukungnya. Dan kebutuhan tersebut sangat mempengaruhi dalam pembuatan simulasi tersebut. Adapun hardware yang digunakan dalam perancangan simulasi pintu air otomatis yaitu mikrokontroler Atmega8535,Sensor Ultrasonic, Motor DC, Timer, Alarm Buzzer,Lcd, Push button. Kebutuhan ini nantinya akan berpengaruh dalam sistemnya dan kebutuhan perangkat keras tersebut mudah di temui di pasaran. Tanpa adanya kebutuhan ini maka sistem tidak akan berjalan dan tidak dapat difungsikan. Beberapa penjelasan tentang kebutuhan perangkat keras yang mendukung pembuatan sistem keamanan ini akan di jelaskan dibawah ini.
2.2 Pengenalan Mikrokontroler
microwave oven, televisi, mesin cuci, sistem keamanan rumah, PDA, dll. Mikrokontroler dapat kita gunakan untuk berbagai aplikasi misalnya untuk pengendalian, otomasi industri, telekomunikasi, dan lain-lain. Keuntungan menggunakan mikrokontroler yaitu harganya murah, dapat di program berulang kali, dan dapat diprogram sesuai dengan keinginan. Saat ini banyak mikrokontroler yang ada dipasaran yaitu Intel 8048 dan 8051(MCS 51), Motorola 68HC11, Microchip PIC, Hitachi H8, dan Atmel AVR. Salah satu mikrokontroler yang banyak digunakan saat ini yaitu mikrokontroler AVR, AVR adalah mikrokontroler RISC (Reduce Instruction Set Compute) 8 bit berdasarkan arsitektur Harvard, yang dibuat oleh Atmel pada tahun 1996. AVR mempunyai kepanjangan Advanced Versatile RISC atau Alf and Vegard’s Riscproessor yang berasal dari nama dua mahasiswa Norwegia Institute of Technology (NTH), yaitu alf-Egil Bogen danVegard Wollan.
berbagai keperluan lain. Secara umum mikrokontroler AVR dapat dikelompokkan menjadi 3 kelompok, yaitu Tiny AVR, AVR, dan MegaAVR pada Tabel 2.1
Tabel 2.1 Pebedaan Seri AVR Berdasarkan Jumlah Memori
Microcontroller AVR Memori (byte)
Jenis Paket IC Flash EEPROM SRAM
TinyAVR 8-32 Pin 1-2K 64-128 0-128
AVR (classic AVR) 20-44 Pin 1-8K 128-512 0-1K
MegaAVR 32-64 Pin 8-128K 512-4K 512-4K
( Sumber :
http://green-elektronik.blogspot.com/2010/07/mikrokontroler-dan-mikroprosesor.html)
Pemrograman mikrokontroler AVR dapat menggunakan low level language (assembly) dan high level language (C, Basic, Pascal, Java, dll) tergantung compiler yang digunakan. Bahasa Assembler mikrokontroler AVR memiliki kesamaan intruksi, sehingga jika pemrograman satu jenis mikrokontroler AVR sudah dikuasai, maka akan dengan mudah menguasai pemrograman keseluruhan mikrokontroler jenis AVR, namun bahasa assembler relative lebih sulit dipelajari dari pada bahasa C, untuk pembuatan suatu proyek yang besar akan memakan waktu yang lama, serta penulisan programnya akan panjang. Sedangkan Bahasa C memiliki keunggulan disbanding bahasa assembler yaitu independent terhadap hardware serta lebih mudah untuk menangani project yang besar. Bahasa C memiliki keuntungan-keuntungan yang dipunyai oleh bahasa mesin (assembly), hampir semua operasi yang dapat dilakukan oleh bahasa mesin, dapat dilakukan oleh bahasa C dengan penyusunan program yang lebih sederhana dan mudah. (Sumber : Wardana lingga,2006)
2.2.1 Fitur-fitur Mikrokontroler ATMega8535
chip. ATMega8535 adalah salah satu anggota dari keluarga ATMega. ATMega8535 dirancang oleh Atmel sesuai dengan instruksi standar dan susunan pin 80C5. Fitur-fitur yang dimiliki ATMega8535 sebagai berikut:
a. Sistem mikrokontroler 8 bit berbasis RISC dengan kecepatan maksimal 16 MHz.
b. Memiliki memori flash 8 KB, SRAM sebesar 512 byte dan EEPROM (Electrically Erasable Programmable Read Only Memory) sebesar 512 byte.
c. Memiliki ADC (Analog Digital Converter) internal dengan ketelitian 10 bit sebanyak 8 saluran.
d. Memiliki PWM (Pulse Wide Modulation) internal sebanyak 4 saluran.
e. Portal komunikasi serial (USART) dengan kecepatan maksimal 2,5 Mbps.
f. Enam pilihan mode sleep, untuk menghemat penggunaan daya listrik.
2.2.2 Ar sitektur mikrokontroler ATmega8535
Gambar 2.1 Blok diagram AVR ATmega8535
Gambar 2.1 blok diagram tersebut dapat dilihat bahwa ATMega8535 memiliki bagian-bagian sebagai berikut :
a. Saluran I/O sebanyak 32 buah, yaitu port A, port B, port C, dan port D b. CPU yang memiliki 32 buah register
d. Flash memory sebesar 8kb yang memiliki kemampuan Read While Write
e. EEPROM sebesar 512 byte dapat diprogram selama beroperasi f. Tiga buah timer/counter dengan kemampuan pembanding g. Two wire serial Interface
h. Port antarmuka SPI
i. Unit interupsi internal dan eksternal j. Port USART untuk komunikasi serial k. ADC 10 bit sebanyak 8 saluran
l. Watchdog Timer dengan osilator internal m. Antarmuka komparator analog.
2.2.3 Konfigurasi pin ATMega8535
IC mikrokontroler dikemas (packging) dalam bentuk yang berbeda. Namun pada dasarnya fungsi kaki yang ada pada IC memiliki persamaan. Gambar salah satu bentuk IC seri mikrokontroler AVR ATmega8535 dapat dilihat berikut.
Berikut ini adalah penjelasan fungsi tiap kaki : a. Port A
Merupakan 8-bit directional port I/O. Setiap pinnya dapat menyediakan internal pull-up resistor (dapat diatur per bit). Output buffer Port A dapat memberi arus 20 mA dan dapat mengendalikan display LED secara langsung. Data Direction Register port A (DDRA) harus disetting terlebih dahulu sebelum Port A digunakan. Bit-bit DDRA diisi 0 jika ingin memfungsikan pin-pin port A yang bersesuaian sebagai input, ataudiisi 1 jika sebagai output. Selain itu, kedelapan pin port A juga digunakan untuk masukan sinyal analog bagi A/D converter.
b. Port B
Tabel 2.2 PIN port B Atmega3585
Port Pin Fungsi Khusus
PB0 TO = Timer/counter 0 external counter input) PB1 T1 = Timer/counter 0 external counter input) PB2 AINO = analog comparator positive input PB3 AIN1 = analog comparator negative input PB4 SS = SPI slave select input
PB5 MOSI = SPI bus Master output/slave input PB6 MISO = SPI bus Master input/slave input PB7 SCK = SPI bus serial clock
langsung. Data Direction Register port B (DDRB) harus disetting terlebih dahulu sebelum Port B digunakan. Bit-bit DDRB di isi 0 jika ingin memfungsikan pin-pin port B yang bersesuaian sebagai input, atau di isi 1 jika sebagai output. Pin-pin port B juga memiliki untuk fungsi-fungsi alternative khusus.
c. Port C
Tabel 2.3 PIN port C Atmega3585
Pin FUNGSI KHUSUS
PC7 TOSC2 (Timer Oscillator Pin2) PC6 TOSC1 (Timer Oscillator Pin1) PC5 Input/Output
PC4 Input/Output PC3 Input/Output PC2 Input/Output
PC1 SDA (Two-wire Serial Buas Data input/output line) PC1 SCL (Two-wire Serial Buas Clock Line)
d. Port D
Merupakan 8-bit directional port I/O. Setiap pinnya dapat menyediakan internal pull-up resistor (dapat diatur per bit). Output buffer Port D dapat memberi arus 20 mA dan dapat mengendalikan display LED secara langsung. Data Direction Register port D (DDRD) harus disetting terlebih dahulu sebelum Port D digunakan. Bit-bit DDRD diisi 0 jika ingin memfungsikan pin-pin port D yang bersesuaian sebagai input, atau diisi 1 jika sebagai output. Selain itu, pin-pin port D juga memiliki untuk fungsi-fungsi alternative khusus seperti yang dapat dilihat dalam table berikut.
e. VCC dan RESET
Merupakan Pin yang berfungsi sebagai pin masukan catu daya, sedangkan RST pada pin 9 merupakan reset dari AVR. Jika pada pin ini diberi masukan low selama minimal 2 machine cycle maka sistem akan di-reset. g. XTAL1 dan XTAL2
XTAL1 adalah masukan ke inverting oscillator amplifier dan input ke internal clock operating circuit, sedangkan XTAL2 adalah output dari inverting oscillatoramplifier.
i. AVcc
Avcc adalah kaki masukan tegangan bagi A/D Converter. Kaki ini harus secara eksternal terhubung keVcc melalui lowpass filter. j. AREF dan GND
kekaki ini sedangkan GND adalah kaki untuk analog ground. Hubungkan kaki ini ke GND, kecuali jika board memiliki analog ground yang terpisah.
2.2.4 Organisasi Memori
ATMega8535 memiliki ruang pengalamatan memori data dan memori program yang terpisah. Sebagai tambahan, ATmega8535memiliki fitur suatu EEPROM Memori untuk penyimpanan data.
a. Memori Data
Memori data terbagi menjadi 3 bagian, yaitu 32 register umum, 64 buah register I/O,dan 512 byte SRAM Internal. Register keperluan umum menempati space data pada alamat terbawah, yaitu $00 sampai $1F. Sementara itu, register khusus untuk menangani I/O dan control terhadap mikrokontroler menempati 64 alamat berikutnya, yaitu mulai dari $20 hingga $5F. Register tersebut merupakan register yang khusus digunakan untuk mengatur fungsi terhadap berbagai peripheral mikrokontroler, seperti kontrol register, timer/counter, fungsi–fungsi I/O, dan sebagainya. Alamat memori berikutnya digunakan untuk SRAM 512 byte, yaitu pada lokasi $60 sampai dengan $25F. Konfigurasi memori data ditunjukkan pada gambar di bawah ini.
b. Memori Pr ogram
ATmega8535 berisi 8K bytes On-Chip di dalam system Memori flash Reprogrammable untuk penyimpanan program. Karena semua AVR instruksi adalah 16 atau 32 bits lebar, Flash adalah berbentuk 4K x16.Untuk keamanan perangkat lunak, Flash Ruang program memori adalah dibagi menjadi dua bagian, bagian boot program dan bagian aplikasi program dengan alamat mulai dari $000 sampai $FFF. Flash Memori mempunyai suatu daya tahan sedikitnya 10,000write/erase Cycles. ATmega8535 Program Counter (PC) adalah 12 bit lebar, alamat ini 4K lokasi program memori.
(Sumber : Heryanto dan Adi : 2008)
Gambar 2.4 peta memori program AVR ATmega8535 2.2.5 Register
Status register adalah register berisi status yang dihasilkan pada setiap operasi yang dilakukan ketika suatu instruksi dieksekusi. SREG merupakan bagian dari inti CPU mikrokontroler.
Bit7 -->I (Global Interrupt Enable),
Bit harus di Set untuk mengenable semua jenis interups. Bit7 -- I (Global Interrupt Enable),
Jika bit Global Interrupt Enable diset, maka fasilitas interupsi dapat dijalankan. Bit ini akan clear ketika ada interrupt yang dipicu dari hardware, setelah program interrupt dieksekusi, maka bit ini harus di set kembali dengan instruksi SEI. Bit 6 – T : Bit Copy Storage
Instruksi bit copy BLD dan BST menggunakan bit T sebagai sumber atau tujuan dalam operasi bit.
Bit 5 – H : Half Carry Flag Bit 4 – S : Sign Bit
Bit S merupakan hasil exlusive or dari Negative Flag N dan Two’s Complement Overflow Flag V.
Bit 3 – V : Two’s Complement Overflow Flag Digunakan dalam operasi aritmatika
Bit 2 – N : Negative Flag
Jika operasi aritmatika menghasilkan bilangan negatif, maka bit ini akan set. Bit 1 – Z : Zero Flag
Jika operasi aritmatika menghasilkan bilangan nol, maka bit ini akan set. (Sumber : Heryanto dan Adi, 2008)
2.3 MOTOR DC
yang termasuk stator adalah badan motor, sikat-sikat dan inti kutub magnet. Bagian rotor adalah bagian yang berputar dari motor DC, yang termasuk rotor ialah lilitan jangkar, jangkar, komutator, tali, isolator, poros, bantalan dan kipas.
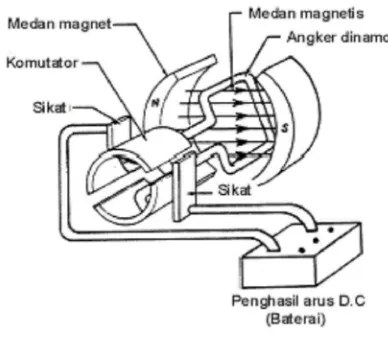
Motor DC memerlukan suplai tegangan yang searah pada kumparan medan untuk diubah menjadi energi mekanik. Kumparan medan pada motor dc disebut stator (bagian yang tidak berputar) dan kumparan jangkar disebut rotor (bagian yang berputar). Jika terjadi putaran pada kumparan jangkar dalam pada medan magnet, maka akan timbul tegangan (GGL) yang berubah-ubah arah pada setiap setengah putaran, sehingga merupakan tegangan bolak-balik. Prinsip kerja dari arus searah adalah membalik phasa tegangan dari gelombang yang mempunyai nilai positif dengan menggunakan komutator, dengan demikian arus yang berbalik arah dengan kumparan jangkar yang berputar dalam medan magnet. Bentuk motor paling sederhana memiliki kumparan satu lilitan yang bisa berputar bebas di antara kutub-kutub magnet permanen.
Gambar 2.6Motor D.C
lilitan pada gambar di atas disebut angker dinamo. Angker dynamo adalah sebutan untuk komponen yang berputar di antara medan magnet.
2.3.1 Pr insip Dasar Cara Kerja
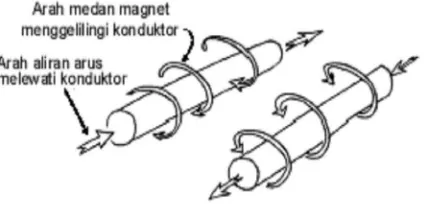
Jika arus lewat pada suatu konduktor, timbul medan magnet di sekitar konduktor. Arah medan magnet ditentukan oleh arah aliran arus pada konduktor.
Gambar 2.7 Medan magnet yang membawa arus mengelilingi konduktor . Aturan Genggaman Tangan Kanan bisa dipakai untuk menentukan arah garis fluks di sekitar konduktor. Genggam konduktor dengan tangan kanan dengan jempol mengarah pada arah aliran arus, maka jari-jari anda akan menunjukkan arah garis fluks. Gambar 2.8 menunjukkan medan magnet yang terbentuk di sekitar konduktor berubah arah karena bentuk U.
Catatan :
Medan magnet hanya terjadi di sekitar sebuah konduktor jika ada arus mengalir pada konduktor tersebut.
Pada motor listrik konduktor berbentuk U disebut angker dinamo.
Gambar 2.9. Medan magnet mengelilingi konduktor dan diantara kutub. (Sumber : staff.ui.ac.id/internal/.../DCMotorPaperandQA.pdf )
Jika konduktor berbentuk U (angker dinamo) diletakkan di antara kutub uatara dan selatan yang kuat medan magnet konduktor akan berinteraksi dengan medan magnet kutub. Lihat gambar 2.10
Gambar 2.10 Reaksi garis fluks.
berusaha bergerak ke atas untuk keluar dari medan kuat ini. Medan konduktor B yang berlawanan arah jarum jam akan menambah medan pada kutub dan menimbulkan medan yang kuat di atas konduktor. Konduktor akan berusaha untuk bergerak turun agar keluar dari medan yang kuat tersebut. Gaya-gaya tersebut akan membuat angker dinamo berputar searah jarum jam.
Mekanisme kerja untuk seluruh jenis motor secara umum : a. Arus listrik dalam medan magnet akan memberikan gaya.
b. Jika kawat yang membawa arus dibengkokkan menjadi sebuah lingkaran / loop, maka kedua sisi loop, yaitu pada sudut kanan medan magnet, akan mendapatkan gaya pada arah yang berlawanan.
c. Pasangan gaya menghasilkan tenaga putar / torque untuk memutar kumparan.
d. Motor-motor memiliki beberapa loop pada dinamonya untuk memberikan tenaga putaran yang lebih seragam dan medan magnetnya dihasilkan oleh susunan elektromagnetik yang disebut kumparan medan.
Gambar 2.11 Prinsip kerja motor dc
Agar proses perubahan energi mekanik dapat berlangsung secara sempurna, maka tegangan sumber harus lebih besar daripada tegangan gerak yang disebabkan reaksi lawan. Dengan memberi arus pada kumparan jangkar yang dilindungi oleh medan maka menimbulkan perputaran pada motor.
Dalam memahami sebuah motor, penting untuk mengerti apa yang dimaksud dengan beban motor. Beban dalam hal ini mengacu kepada keluaran tenaga putar / torque sesuai dengan kecepatan yang diperlukan. Beban umumnya dapat dikategorikan ke dalam tiga kelompok :
a. Beban torque konstan adalah beban dimana permintaan keluaran energinya bervariasi dengan kecepatan operasinya namun torquenya tidak bervariasi. Contoh beban dengan torque konstan adalah corveyors, rotary kilns, dan pompa displacement konstan.
c. Beban dengan energi konstan adalah beban dengan permintaan torque yang berubah dan berbanding terbalik dengan kecepatan. Contoh untuk beban dengan daya konstan adalah peralatan-peralatan mesin.
2.3.2 Pr insip Arah Putaran Motor
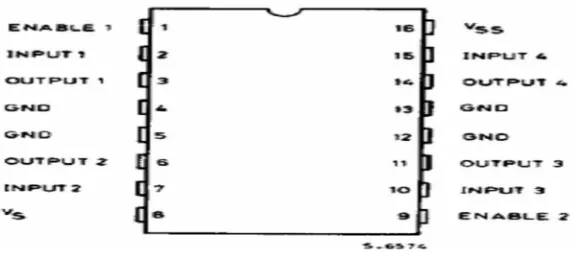
Untuk menentukan arah putaran motor digunakan kaedah Flamming tangan kiri. Kutub-kutub magnet akan menghasilkan medan magnet dengan arah dari kutub utara ke kutub selatan. Jika medan magnet memotong sebuah kawat penghantar yang dialiri arus searah dengan empat jari, maka akan timbul gerak searah ibu jari. Gaya ini disebut gaya Lorentz, yang besarnya sama dengan F. Prinsip motor : aliran arus di dalam penghantar yang berada di dalam pengaruh medan magnet akan menghasilkan gerakan. Besarnya gaya pada penghantar akan bertambah besar jika arus yang melalui penghantar bertambah besar. Rangkaian driver motor DC dapat berupa rangkaian transistor, relay, atau IC ( Integrated Circuit ). Rangkaian driver yang umum digunakan adalah dengan IC L293D. IC L293D berisi 4 channel driver dengan kemampuan mengalirkan arus sebesar 600mA per channel. Tegangan kerja IC L293D dari 6 volt sampai dengan 36 volt dan arus impuls tak berulang maksimum sebesar 1,2 ampere. Konfigurasi pin IC L293D ditunjukkan pada Gambar 2.12.
2.4 TIMER
Timer/Counter merupakan fitur di setiap mikrokontroler yang sangat banyak peranannya dalam perancangan sebuah sistem. Dengan sebuah timer kita bisa menunda suatu eksekusi dari suatu perintah, sehingga sistem mikrokontroler yang berjalan cepat (mungkin dalam orde nano atau mikro detik), dapat sinkron dengan operator (manusia). Dengan timer pula kita dapat menghitung lebar pulsa/frekuensi dari suatu sinyal, menghitung kecepatan jatuh suatu benda,atau kecepatan suatu kendaraan, dengan timer/counter kita dapat menghitung jumlah mobil yang lewat dalam jalan tol misalnya, dan ada lebih banyak lagi fungsi timer/counter dalam sebuah mikrokontroler.
(Sumber : Polong,2008)
2.5 RELAY
Transistor tidak dapat berfungsi sebagai sebagai switch (saklar) tegangan DC atau tegangan tinggi .Selain itu, umumnya tidak digunakan sebagai switching untuk arus besar (>5 A). Dalam hal ini, penggunakan relay sangatlah tepat. Relay berfungsi sebagai saklar yang bekerja berdasarkan input yang dimilikinya.
Keuntungan relay :
a) Dapat switch AC dan DC, transistor hanya switch DC b) Relay dapat switch tegangan tinggi, transistor tidak dapat c) Relay pilihan yang tepat untuk switching arus yang besar d) Relay dapat switch banyak kontak dalam 1 waktu
Kekurangan relay :
b) Relay tidak dapat switch dengan cepat
c) Relay butuh daya lebih besar disbanding transistor d) Relay membutuhkan arus input yang besar
( Sumber : Wardana Lingga,widodo : 2006 )
2.6 Sensor Ultrasonic
Gelombang ultrasonik merupakan gelombang mekanik longitudinal dengan frekuensi di atas 20 kHz. Gelombang ini dapat merambat dalam medium padat, cair dan gas, hal disebabkan karena gelombang ultrasonik merupakan rambatan energi dan momentum mekanik sehingga merambat sebagai interaksi dengan molekul dan sifat enersia medium yang dilaluinya.
Karakteristik gelombang ultrasonik yang melalui medium mengakibatkan getaran partikel dengan medium amplitudo sejajar dengan arah rambat secara longitudinal sehingga menyebabkan partikel medium membentuk rapatan (Strain) dan tegangan (Stres). Proses kontinu yang menyebabkan terjadinya rapatan dan regangan di dalam medium disebabkan oleh getaran partikel secara periodik selama gelombang ultrasonik melaluinya.
untuk menerima pantulan pada jarak tertentu. Perhitungan ini didapat dari rumus berikut :
S = (tIN x V) ÷ 2 Dimana :
S = Jarak antara sensor ultrasonik dengan objek yang dideteksi V = Cepat rambat gelombang ultrasonik di udara (344 m/s)
tIN = Selisih waktu pemancaran dan penerimaan pantulan gelombang (Prinsip kerja PING)
Gambar 2.13 Sensor Ultrasonic
1. Sinyal dipancarkan oleh pemancar ultrasonik. Sinyal tersebut berfrekuensi diatas 20kHz, biasanya yang digunakan untuk mengukur jarak benda adalah 40kHz. Sinyal tersebut di bangkitkan oleh rangkaian pemancar ultrasonik.
2. Sinyal yang dipancarkan tersebut kemudian akan merambat sebagai sinyal / gelombang bunyi dengan kecepatan bunyi yang berkisar 344 m/s. Sinyal tersebut kemudian akan dipantulkan dan akan diterima kembali oleh bagian penerima Ultrasonik.
S = (tIN x V) ÷ 2 Dimana :
S = Jarak antara sensor ultrasonik dengan objek yang dideteksi V = Cepat rambat gelombang ultrasonik di udara (344 m/s)
tIN = Selisih waktu pemancaran dan penerimaan pantulan gelombang. (Sumber : Fajar,andi : 2011)
2.7 LCD
LCD (Liquid Cristal Display) adalah salah satu komponen elektronika yang berfungsi sebagai tampilan suatu data, baik karakter, huruf ataupun grafik. Dipasaran tampilan LCD sudah tersedia dalam bentuk modul yaitu tampilan LCD beserta rangkaian pendukungnya termasuk ROM dll. LCD mempunyai pin data, kontrol catu daya, dan pengatur kontras tampilan.
No Pin Simbol Deskripsi
Tabel 2.4 Fungsi dari pin-pin pada rangkaian LCD yaitu:
1. Pin data dapat dihubungkan dengan bus data dari rangkaian lain seperti mikrokontroler dengan lebar data 8 bit.
2. Pin RS (Register Select) berfungsi sebagai indikator atau yang menentukan jenis data yang masuk, apakah data atau perintah. Logika low menunjukan yang masuk adalah perintah, sedangkan logika high menunjukan data.
3. Pin R/W (Read Write) berfungsi sebagai instruksi pada modul jika low tulis data, sedangkan high baca data.
4. Pin E (Enable) digunakan untuk memegang data baik masuk atau keluar. 5. Pin VLCD berfungsi mengatur kecerahan tampilan (kontras) dimana pin
ini dihubungkan dengan trimpot 5 Kohm, jika tidak digunakan dihubungkan ke ground, sedangkan tegangan catu daya ke LCD sebesar 5 Volt.
LCD telah dilengkapi dengan mikrokontroler HD44780 yang berfungsi sebagai pengendali. LCD ini juga mempunyai CGROM (Character Generator Read Only Memory), CGRAM (Character Generator Random Access Memory) dan DDRAM (Display Data Random Access Memory).
2.7.1 DDRAM
DDRAM memori tempat karakter yang akan ditampilkan berada. Contoh, untukkarakter ‘A’ atau 41H yang ditulis pada alamat 00, maka karakter tersebut akan tampil pada baris pertama dan kolom pertama dari LCD. Apabila karakter ditulis dialamat 40, maka karakter tersebut akan tampil pertama dari LCD.
CGRAM (Character Generator Random Access Memory) adalah merupakan memori untuk menggambarkan pola sebuah karakter dimana bentuk dari karakter dapat diubah-ubah sesuai dengan keinginan. Namun memori ini akan hilang saat power supply tidak aktif, sehingga pola karakter akan hilang.
2.7.3 CGROM
CGROM (Character Generator Read merupakan memori untuk menggambarkan pola sebuah karakter dimana pola tersebut sudah ditentukan secara permanen dari HD 44780, sehingga pengguna tidak dapat merubahnya. Karena ROM bersifat permanen, maka pola karakter tersebut tidak akan hilang walaupun sumber tegangan tidak aktif.
Pada tabel 2.4 terlihat pola-pola karakter yang tersimpan dalam lokasi tertentu dalam CGROM. Pada saat HD44780 akan tersimpan pada DDRAM, maka HD44780 menampilkan data 41H yang akan mengambil data di alamat 41H (0100 0001) yang ada pada CGROM yaitu pola karakter A.
(Sumber : Lcd,2006)
2.8 Push button
terminal jenis NC digunakan untuk mematikan rangkaian, namun semuanya tergantung dari kebutuhan.
(Sumber : Anonim,2008)
Gambar 2.14 Push button
2.9 Alar m Buzzer
Gambar 2.15 Buzzer
2.10 Resistor
Secara umum resistor disimbolkan seperti Gambar 2.16. namun untuk resistor khusus ada variasi tersendiri sesuai dengan karakteristiknya.
Gambar 2.16 Simbol resistor (Sumber : www.mikroe.com/old/books/keu/01.htm)
Resistor yang digunakan dalam elektronika dibedakan menjadi dua , yaitu resistor linear dan resistor nonlinear atau resistor tetap ( fixed resistor ) dan resistor tidak tetap ( variable resistor ). Resistor linear adalah resistor yang bekerja sesuai dengan hukum Ohm, yaitu V=I.R. Jika nilai tahanannya semakin besar maka arusnya semakin kecil dan sebaliknya. Resistor nonlinear adalah resistor yang besar tahanannya dapat berubah-ubah akibat pengaruh faktor-faktor luar seperti fotoresistor, thermistor, dan sebagainya
(Sumber : Sugiri, 2004 )
Kapasitor adalah alat yang dapat menyimpan energi di dalam medan listrik, dengan cara mengumpulkan ketidakseimbangan internal dari muatan listrik.Kondensator diidentikkan mempunyai dua kaki dan dua kutub yaitu positif dan negatif serta memiliki cairan elektrolit dan biasanya berbentuk tabung.
Jenis yang satunya lagi kebanyakan nilai kapasitasnya lebih rendah, tidak mempunyai kutub positif atau negatif pada kakinya, kebanyakan berbentuk bulat pipih berwarna coklat, merah, hijau dan lainnya seperti tablet atau kancing baju yang sering disebut kapasitor ( capacitor).
Gambar 2.17 Lambang kapasitor
Kondensator sering disebut kapasitor ataupun sebaliknya yang pada ilmu elektronika disingkat dengan huruf (C)
( Sugiri, 2004 ).
2.12 Dioda
dioda seperti silinder kecil dan biasanya diberi tanda berupa lingkaran warna putih, yang menandakan posisi kaki Katoda. Jenis – jenis dari dioda diantaranya : Dioda Zener, LED, Infrared, Photodioda dan sebagainya. LED ( Light Emitting Diode ), yaitu Dioda yang dapat memancarkan sinar, bisa digunakan sebagai lampu indikator dengan kelebihan yaitu umur aktifnya sangat lama jika dibandingkan dengan lampu pijar.
( Sugiri, 2004 ).
2.13 Kebutuhan Software
Perangkat lunak atau software merupakan perangkat lunak dari sebuah sistem sebagai pengontrol dari perangkat keras. Perangkat lunak yang digunakan dalam Simulasi pengendalian pintu air otomatis menggunakan mirkrokontroler ATMEGA8535 adalah dengan Codevision AVR menggunakan Bahasa C.
2.13.1 CodeVision AVR
Code Vision AVR merupakan salah satu software kompiler yang khusus digunakan untuk mikrokontroler keluarga. Meskipun CodeVision AVR termasuk software komersial, namun kita tetap dapat menggunakan-nya dengan mudah karena terdapat versi evaluasi yang tersedia secara gratis walaupun dengan kemampuan yang dibatasi. Code Vision AVR sebuah cross-compiler C, Integrated Development Environtment (IDE), dan Automatic Program Generator yang didesain untuk mikrokontroler buatan Atmel seri AVR. CodeVisionAVR dapat dijalankan pada sistem operasi Windows 95, 98, Me, NT4, 2000, dan XP, 7.
ikon CodeVisionAVR C Compiler, maka berikut akan tampil bentuk .exe tampilannya pada gambar 2.18.
Gambar 2.18 tampilan awal CodeVision AVR
Untuk memulai bekerja dengan CodeVisionAVR pilih pada menu File -> New. Maka akan muncul gambar 2.19 kotak dialog sebagai berikut :
Gambar 2.19 Tampilan Project Baru
Pilih Project kemudian tekan OK, maka akan muncul kotak dialog berikut.
Gambar 2.20 Tampilan Code Wizard AVR
penggunaan fasilitas-fasilitas seperti LCD, interrupt, dan sebagainya. CodeWizardAVR ini sangat membantu programmer untuk setting chip sesuai keinginan.
Gambar 2.21 Jenis Mikrokontroler Yang Dipakai
Gambar 2.22 CodeVision AVR
Gambar 2.22 CodeVision AVR merupakan yang terbaik bila dibandingkan dengan kompiler \u 2013 kompiler yang lain karena beberapa kelebihan yang dimiliki oleh CodeVision AVR antara lain :
a. Menggunakan IDE (intergrated Development Environment).
sedemikian rupa sehingga membantu memudahkan kita dalam penulisan program.
c. Mampu membangkitkan kode program secara otomatis dengan menggunakan fasilitas CodeWizard AVR.
d. Memiliki fasilitas untuk mendownload program langsung dari CodeVision AVR dengan menggunakan hardware khusus seperti Atmel STK500, Kanda Sysrem STK200+ / 300 dan beberapa hardsware lain yang telah didefinisikan oleh CodeVision AVR.
e. Memiliki fasilitas debugger sehingga dapat menggunakan software compiler lain untuk mengecek kode assembler-nya, contohnya AVR Studio.
f. Memiliki terminal komukasi serial yang terintregasi dalam CodeVision AVR sehingga dapat digunakan untuk membantu pengecekan program yang telah dibuat khususnya yang menggunakan fasilitas komunikasi serial UART.
CodeVisionAVR juga mempunyai Automatic Program Generator bernama Code Wizard AVR . instruksi yang diperlukan untuk membuat fungsi-fungsi berikut:
a) Set-up akses memori eksternal b) Identifikasi sumber reset untuk chip c) Inisialisasi port input/output
d) Inisialisasi interupsi eksternal e) Inisialisasi Timer/Counter f) Inisialisasi Watchdog-Timer
g) Inisialisasi UART (USART) dan komunikasi serial berbasis buffer yang digerakkan oleh interupsi
h) Inisialisasi Pembanding Analog i) Inisialisasi ADC
j) Inisialisasi Antarmuka SPI k) Inisialisasi Antarmuka Two-Wire l) Inisialisasi Antarmuka CAN
m) Inisialisasi Bus I2C, Sensor Suhu LM75, Thermometer/Thermostat DS1621 dan Real-Time Clock PCF8563, PCF8583, DS1302, dan DS1307 n) Inisialisasi Bus 1-Wire dan Sensor Suhu DS1820, DS18S20 o) Inisialisasi modul LCD
2.13.2 Pemilihan Chip dan Frekwensi Xtall
wizard adalah memilih jenis chip mikrokontroller yang digunakan dalam project dan frekwensi xtall yang digunakan. Pemilihan chip dan frekwensi xtall dapat dilihat seperti pada Gambar 2.23
Gambar 2.23 Tampilan Pemilihan Chip dan Frekuensi X tall.
Gambar 2.24 Inisialisasi LCD Port I/O.
Untuk selanjutnya fasilitas-fasilitas lainnya dapat disetting sesuai kebutuhan dari pemrograman. Setelah selesai dengan. CodeWizardAVR, selanjutnya pada menu File, pilih Generate, Save and Exit dan simpan pada direktori yang diinginkan. (Sumber : Agus bejo,2008)
2.13.3 Compiler atau Penerjemah
(compiler) adalah sebuah program komputer yang berguna untuk menerjemahkan program komputer yang ditulis dalam bahasa pemrograman tertentu menjadi program yang ditulis dalam bahasa pemrograman lain.
2.13.4 Bahasa Pemrograman C
Bahasa C dirancang oleh Dennis M. Ritchie pada tahun 1972 di AT&T Bell Labs. Bahasa C dikembangkan dari bahasa BPCL (Basic Combined Programming Language ) dan bahasa B. Bahasa BPCL di kembangkan oleh Martin Richard pada tahun 1967 sebagai bahasa system operasi dan compiler. Ken Thompson pada tahun 1970 telah merancang bahasa B dengan memasukkan feature BPCL. Bahasa B dirancang untuk membuat system operasi UNIX/LINUX untuk computer DEC PDP-7 pada Bell Laboratories.
(Heryanto,adi : 2008)
2.13.5 DT-HiQ AVR-51 USB ISP
Merupakan in-system programmer yang dapat dihubungkan ke komputer melalui port USB untuk memprogram mikrokontroler keluarga AVR® 8 bit RISC dan MCS-51® yang memiliki fitur ISP. Produk ini dapat bekerja dengan perangkat lunak yang mendukung protokol ATMEL AVRISP MKII seperti AVR Studio©, CodeVisionAVR©, AVRDUDE (WinAVR) dan BASCOM-AVR© untuk memprogram mikrokontroler AVR. DT-HiQ AVR-51 USB ISP [versi mkII] juga dilengkapi dengan perangkat lunak berbasis Windows® yang menyediakan antarmuka yang sederhana dan mudah untuk memprogram mikrokontroler keluarga MCS-51 seri AT89.
Dimensi : (belum termasuk kabel ) 6,6 cm (p) x 4,1 cm (l) x 1,5 cm (t). Panjang kabel ISP : ±10 cm.
Spesifikasi :
a. Dapat digunakan untuk semua tipe AVR® 8 bit RISC dan mikrokontroler MCS-51® seri AT89 yang memiliki fitur ISP.
1. KeluargaAVR
Sesuai dengan dukungan perangkat lunak yang digunakan. 2. Keluarga MCS-51
AT89LP2052, AT89S2051, AT89S51, AT89S53, AT89S8252, AT89S8253, AT89LP4052, AT89S4051, AT89S52, AT89LS53, AT89LS8252
c. Antarmuka USB ke komputer.
d. Beroperasi pada tegangan target 2,7V sampai 5,5V.
e. Mengambil suplai daya dari target board dengan kebutuhan arus maksimum 50 mA @ 5,5 V, sehingga aman bagi komputer jika terjadi hubungan singkat pada target board.
f. Menggunakan protokol ATMEL AVRISP MKII untuk mikrokontroler AVR® 8 bit RISC.
g. Mendukung Flash, EEPROM, Lock Bit, Fuse Bit Programming, dan mendukung file format Intel HEX atau BIN serta dilengkapi perangkat lunak berbasis Windows® untuk keluarga mikrokontroller MCS-51 seri AT89.
h. Tersedia 2 pilihan konektor ISP (5x2) standar ATMEL untuk target board dengan mikrokontroler keluarga AVR dan MCS-51.
i. Tersedia USB driver yang kompatibel dengan Windows® XP/Vista/Win7.
j. Enclosure berbahan logam.
l. Dilengkapi soket konverter DT-HiQ AVR ISP 10 to 6 Converter untuk menghubungkan AVR in-system programmer berkonektor 10 pin ke target board berkonektor ISP 6 pin.
m.Dilengkapi dengan panduan troubleshooting dan solusinya.
Gambar 2.25 DT-HiQ AVR ISP 2.13.6 Pr oteus 7 Pr ofesional
Proteus adalah sebuah software untuk mendesain PCB yang juga dilengkapi dengan simulasi PSpice pada level skematik sebelum rangkaian skematik di-upgrade ke PCB sehingga sebelum PCBnya di cetak kita akan tahu apakah PCB yang akan kita cetak apakah sudah benar atau tidak. Proteus mampu mengkombinasikan program ISIS untuk membuat skematik desain rangkaian dengan program ARES untuk membuat layout PCB dari skematik yang kita buat. Software Proteus ini bagus digunakan untuk desain rangkaian mikrokontroller. Proteus juga bagus untuk belajar elektronika seperti dasar-dasar elektronika sampai pada aplikasi pada mikrokontroller. Software Proteus ini menyediakan banyak contoh aplikasi desain yang disertakan pada instalasinya. Sehingga memungkinkan kita bisa belajar dari contoh-contoh yang sudah ada.
Fitur-fitur yang terdapat dalam Proteus adalah sebagai berikut :
digital maupun analog maupun gabungan keduanya.
b. Mendukung simulasi yang menarik dan simulasi secara grafis.
c. Mendukung simulasi berbagai jenis microcontroller seperti PIC 8051 series.
d. Memiliki model-model peripheral yang interactive seperti LED, tampilan LCD, RS232, dan berbagai jenis library lainnya.
e. Mendukung instrument-instrument virtual seperti voltmeter, ammeter, oscciloscope, logic analyser, dan lain-lainnya.
f. Memiliki kemampuan menampilkan berbagi jenis analisis secara grafis seperti transient, frekuensi, noise, distorsi, AC dan DC, dan lain-lainnya.
g. Mendukung berbagai jenis komponen-komponen analog.
h. Mendukung open architecture sehingga kita bisa memasukkan program seperti C++ untuk keperluan simulasi.
i. Mendukung pembuatan PCB yang di-update secara langsung dari program ISIS ke program pembuat PCB-ARES.
ISIS dipergunakan untuk keperluan pendidikan dan perancangan. Beberapa fitur umum dari ISIS adalah sebagai berikut :
a. Windows dapat dioperasikan pada Windows 98/Me/2k/XP dan Windows terbaru.
b. Routing secara otomatis dan memiliki fasilitas penempatan dan penghapusan dot.
d. Mendukung untuk perancangan berbagai jenis bus dan komponen-komponen pin, port modul dan jalur.
e. Memiliki fasilitas report terhadap kesalahan-kesalahan perancangan dan simulasi elektrik.
f. Mendukung fasilitas interkoneksi dengan program pembuat PCB-ARES.
g. Memiliki fasilitas untuk menambahkan package dari komponen yang belum didukung.
Gambar 2.26 Pop-Up Screen Proteus
Proteus lebih memiliki kelebihan pada desainnya yang sederhana, sangat mudah dan bagus digunakan untuk perancangan rangkaian mikrokontroller yang akan sangat membantu digunakan oleh mahasiswa yang mengambil mata kuliah berhubungan dengan mikr€okontroller.
Pada bab ini akan dijelaskan mengenai proses pembangunan rancangan Simulasi Pengendalian Pintu Air Otomatis dengan Warning Alarm berbasis mikrokontroler. Proses pembuatan sistem dalam sub-bab ini akan dibagi menjadi beberapa tahap antara lain : analisis sistem dan perancangan sistem meliputi perancangan perangkat keras, perancangan perangkat lunak.
3.1 Analisis Sistem
Berdasarkan latar belakang dan perumusan masalah yang terdapat dalam bab sebelumnya dapat diketahui perancangan yang dilakukan adalah membuat simulasi pengendalian pintu air otomatis dengan warning alarm berbasis mikrokontroler yang semula dikendalikan secara manual kemudian akan dioptimasikan secara otomatis.
3.2 Diagram Blok Penelitian
Pada suatu sistem pintu air otomatis yang akan dibuat gambaran umumnya dimulai dari sensor Ultrasonic dengan disimulasikan apabila ketinggian air mencapai pada batas yang ditentukan dan disetting oleh push button maka data pada mikrokontroler Atmega8535L akan memberikan perintah dengan bunyi buzzer yang akan memberikan peringatan akan batas ketinggian air yang nantinya LCD menampilkan informasi ketinggian dengan memberikan suatu perintah untuk membuka tutup pintu air yang digerakkan oleh motor DC dan relay.
Proses telah selesai dilakukan untuk membuka tutup pintu air otomatis tersebut dan alat akan mengembalikan pada mikrokontroler kemudian diproses oleh sistem. Berikut Gambar 3.1 adalah penjelasan Diagram Blok Penelitian.
Gambar 3.1 Blok Diagram 3.2.1 Blok Input
motor DC secara otomatis. Sensor dihubungkan ke mikrokontroller ATMEGA8535L melalui port yang ditentukan sebagai masukan pada mikrokontroler.
3.2.2 Blok Proses
Gambar 3.1 Blok proses Mikrokontroler produk dari seri ATMEGA8535L menjadi komponen utama pada rangkaian kendali dan kontrol sistem ini, mikrokontroler ini terprogram perangkat lunak CodevisionAvr dengan bahasa C sebagai pengendali pintu air yang telah di compile, selanjutnya di download (dimasukan) kedalam mikrokontroler. Mikrokontroler yang telah terprogram menjadi otak dari perancangan alat, selanjutnya siap untuk dihubungkan dengan bagian lain atau input – output (I/O) antara lain Sensor Ultrasonic, Lcd , Buzzer, Push Button, motor penggerak Dc dan relay.
3.2.3 Blok Output
Gambar 3.1 Blok keluaran terdiri atas LCD, buzzer dan motor Dc sebagai penggerak. Motor penggerak berfungsi untuk menggerakkan pintu air secara vertikal baik menutup pintu kebawah maupun membuka pintu keatas. Selanjutnya Motor DC dihubungkan ke mikrokontroler ATMEGA8535L melalui port yang ditentukan sebagai keluaran untuk buka-tutup pintu air dan buzzer sebagai alarm peringatan akan intensitas ketinggian air serta ketinggian bisa ditampilkan melalui LCD.
3.3 Perancangan Sistem
perangkat keras dan perangkat lunak, flowchart dan deskripsi dari kebutuhan perangkat keras.
Untuk merancang suatu simulasi maka kita perlu menentukan jenis – jenis atau spesifikasi perangkat keras yang akan kita gunakan. Hal ini merupakan persiapan awal yang harus dilakukan.
3.3.1 Kebutuhan Perangkat Keras
Perangkat keras minimal yang digunakan untuk membuat simulasi pengendalian pintu air otomatis ini yang berbasis mikrokontroler adalah sebagai berikut :
a) Mikrokontroler
Rangkaian ini menggunakan ATMega8535L dengan menggunakan IC ATMega8535L yang digunakan sebagai minimum system. Rangkaian ini berfungsi sebagai otak sistem yang mengatur jalannya rangkaian secara keseluruhan.
b) Relay
menggunakan 2 buah relay. Relay ini nantinya akan di tempatkan pada modul dan akan disabungkan pada motor DC.
c) Catu Daya
Rangkaian ini terdiri dari tansformator yang berfungsi mengubah tegangan dari AC ke DC. Selain itu terdapat pula regulator yang berfungsi untuk menstabilkan tegangan. Fungsi lainnya yaitu menurunkan tegangan dari 220 V AC ke 5 V DC. Jadi secara garis besar fungsi rangkaian catu daya adalah untuk menurunkan tegangan dari 220 VAC ke 5 V DC serta menstabilkan tegangannya
d) Motor DC
pintu air secara otomatis baik secara membuka keatas dan menutup kebawah.
e) Sensor
Sensor digunakan untuk memberikan input yang nantinya akan dibaca oleh mikrokontroler dan ditampilkan melalui Lcd. Sensor disini menggunakan sensor Ultrasonic yang mengidentifikasi untuk mendeteksi ketinggian volume air.
f) Casis ( Rangka ) dan Pintu
Rangka dan pintu (Miniatur/Maket) yang digunakan dalam alat ini menggunakan bahan dari akrilik dan kaca untuk wadah berjalannya suatu simulasi proses buka tutup pintu air yang akan dibuat.
g) LCD
LCD (Liquid Cristal Display) salah satu komponen elektronika yang berfungsi sebagai tampilan suatu data (ketinggian air), baik karakter, huruf ataupun grafik pada proses buka-tutup pintu air.
3.3.2 Kebutuhan Perangkat Lunak
Perangkat lunak yang dapat digunakan untuk membuat program dan membuat simulasi rangkaian dalam membuat suatu pengendalian pintu air otomatis adalah sebagai berikut :
a) Codevision AVR C Compiler
Setelah itu men – download – kan file *.hex ke dalam minimum system ATMega8535.
b) Proteus 7 profesional
Aplikasi ini digunakan untuk menggambar rangkaian. Dalamprogram terdapat beberapa gambar komponen elektronika sehingga memudahkan dalam pembuatan gambar rangkaian.
3.4 Perancangan Perangkat Keras
Untuk perancangan sistem diperlukan alur suatu proses yang sistematis dan terarah sehingga dapat terencana dengan baik. Tahap – tahap yang akan dibahas dari awal sampai akhir adalah sebagai berikut.
3.4.1 Mikrokontroler ATMega8535
Untuk sistem ini mikrokontroler yang di pakai adalah tipe ATMega8535 karena mikrokontroler tersebut harganya yang terjangkau dalam membuat sistem. Gambar 3.2 dibawah ini adalah rangkaian minimum mikrokontroler tipe ATMega8535 yang digunakan dalam sistem pengendalian pintu air :
3.4.2 Rangkaian Sistem Keseluruhan
Untuk membuat sistem Mikrokontroler ini memiliki 2 fungsi utama yaitu untuk mengkonversi data analog berupa tegangan dan mengolahannya melalui program sehingga data digital berubah biner yang menghasilkan oleh A/D converter didalam mikrokontroler di tampilkan pada LCD. Penggunaan masing-masing port I/O mikrokontroler ATmega8535 dalam sistem ini.
Untuk sistem simulasi pintu airotomatis yang telah dirancang rangkaian atau skema alat secara keseluruhan dengan menggunakan sofware Proteus 7 Profesional sehingga memudahkan dalam pembuatan rangkaian sistem atmega8535L secara keseluruhan. Berikut adalah skema dari alat sistem pintu air otomatis pada Gambar 3.3
Gambar 3.3 Skema Proteus pintu air
Penggunaan masing-masing port I/O mikrokontroler ATmega8535L dalam sistem ini adalah sebagai berikut.
b. Port C.0 ...B.2 > input Push button. c. Port C.6...C.7 > output motor Dc. d. Port C.5 > output Buzzer. e. Port D.2 ...D.3 > Input Sensor f. Port C.3 ...C.4 > input limit switch.
Mikrokontroler tipe ATMega8535L diatas terdapat beberapa port yang digunakan untuk menghubungkan dengan perangkat keras lainnya agar dapat membentuk suatu sistem simulasi pengendalian pintu air otomatis yang dibuat saat ini.
Kombinasi port yang digunakan adalah : Port C.6 dikombinasikan dengan Port C.7 Dalam Port C.6 ini akan dihubungkan dengan Port C.7 yang berfungsi sebagai saluran relay dimana nantinya relay ini akan mendapatkan tegangan bila kutubnya berbeda dan akan menggerakkan motor DC maka bergerak secara otomatis akan terbuka dan tertutup
Tabel 3.1 Kombinasi Port Mikrokontroler ATMega8535 Port
awal
Kombinasi port
keterangan
PC.6 - Saluran Relay 1 yang dapat menggerakkan Motor DC sehingga dapat membuka pintu. PC.7 - Saluran Relay 2 yang dapat menggerakkan
3.5 Perancangan Perangkat Lunak
Pada pembuatan sistem simulasi pintu air otomatis selain diperlukan perancangan kebutuhan perangkat keras atau kebutuhan hardware maka untuk mengimbanginya dengan membutuhkan perancangan kebutuhan perangkat lunak atau kebutuhan software juga.Yang mana sangat diperlukan untuk mengatur kerja dari rangkaian keseluruhan. Pertama – tama yang dibuat adalah program alir (flowchart) dan kemudian akan dilakukan pembuatan maket simulasi serta program untuk menjalankan sistemnya tersebut.
Pada pembuatan perangkat lunak harus melalui proses – proses uji coba secara Hardware maupun Software. Dalam aliran program di dalamnya menyangkut hardware yang diuji dengan konsep yang telah dibuat untuk proses sistem yang akan berjalan menyangkut Motor Dc, Mikrokontroler, LCD, Push button dan sensor Ultrasonic.
Dimana nantinya akan disambungkan dengan Program yang alirannya telah ditentukan sebelumnya sehingga dapat dijalankan dengan baik. Tanpa adanya Aliran proses dalam bentuk flowchart ini maka pembuatan sistem masih kurang efisien dalam proses implementasinya.
Gambar 3.5 merupakan lanjutan dari Gambar 3.4 diatas yang menjelaskan tentang aliran proses pada pembuatan pintu air ini dari mulai proses awal hingga akhir proses tersebut.
Gambar 3.7 Flowchart motor Dc
memberikan suatu aksi untuk membuka tutup pintu air yang digerakkan oleh motor DC dan relay.
3.6 Perancangan Maket
Untuk pembuatan sistem pengontrolan pintu air ini dibutuhkan perancangan maket atau miniatur dalam melakukan uji coba dengan menggunakan mikrokontroler. Yang mana maket ini terbuat dari Akrilik atau mika sebagai bahan simulasi pintu air serta hardware yang mendukung pembuatan sistem tersebut. Berikut adalah Gambar 3.8 Maket dari Pintu Air otomatispada bendungan.
Gambar 3.8 Maket Simulasi Pintu Air
IMPLEMENTASI SISTEM
Pada bab ini akan dibahas mengenai implementasi dari hasil analisa dan rancangan sistem yang telah dibuat pada bab III, serta bagaimana cara sistem tersebut dijalankan dalam implementasi dilakukan dua tahap yaitu implementasi perangkat keras (hardware) dan implementasi proses program untuk perangkat lunak (Software).
4.1 Alat-alat yang Digunakan
Pada bagian ini akan dijelaskan mengenai implementasi program, alat-alat yang digunakan yaitu perangkat keras (hardware) dan perangkat lunak (software) yang dijabarkan sebagai berikut:
4.1.1 Perangkat Keras
Perangkat keras (hardware) yang digunakan adalah: a. Rangkaian minimum Atmega8535L.
b. Maket miniatur pintu air. c. Limit switch.
d. Sensor Ultrasonic. e. Motor Dc.
4.1.2 Perangkat Lunak
Perangkat lunak (software) yang digunakan adalah: a. Windows 7.
b. CodeVisionAVR.exe.
c. Bahasa C sebagai bahasa pemrograman yang digunakan untuk memprogram mikrokontroler.
d. AVR studio 4.
4.2 Implementasi Hardware
Untuk pembuatan perangkat lunak simulasi pengendalian pintu air otomatis dengan warning alarm berbasis mikrokontroler ini dibutuhkan suatu alat yang berguna sebagai penunjang peraga simulasi yang telah dibuat agar dapat mengetahui cara kerja sistem secara keseluruhan dan untuk memastikan apakah sistem telah berjalan sesuai perancangan, agar hardware dapat bekerja harus terhubung dengan rangkaian mikrokontroler Atmega8535L dan komputer. Mikrokontroler Atmega8535L sebuah media penyimpanan program yang akan dibuat, implementasi mikrokontroler Atmega8535L tersebut dapat dilihat pada sub bab sebagai berikut:
4.2.1 Rangkaian Minimum Mikrokontroler Atmega8535L
Gambar 4.1. Rangkaian Minimum Atmega8535L. 4.2.2 Implementasi Maket pintu Air
Gambar 4.2 Miniatur Pintu Air. 4.2.3 Implementasi Limit Switch
Gambar 4.3. Limit Switch. 4.2.4 Implementasi Sensor Ultrasonic
Implementasi Sensor ultrasonik pada simulasi pintu air bekerja dengan cara memancarkan suatu gelombang dan kemudian menghitung waktu pantulan gelombang ketinggian air pada batas level atas dan level bawah yang nantinya ditampilkan oleh LCD. Gambar sensor bisa dilihat pada gambar 4.4.
Gambar 4.4. Ultrasonic. 4.2.5 Implementasi Motor Dc
pada push button maka pintu air digerakan oleh motor dc secara otomatis untuk membuka dan menutup. Gambar motor dc bisa dilihat pada gambar 4.5.
Gambar 4.5. Motor Dc. 4.2.6 Implementasi Buzzer
Gambar 4.6. Buzzer 4.2.7 Implemetasi LCD
Implementasi LCD sistem kerja pada pintu air sebagai media informasi untuk mengetahui ketinggian air pada batas atas dan batas bawah. Gambar tersebut bisa dilihat pada Gambar 4.7.
Gambar 4.7. LCD 16x2. 4.2.8 Push Button
Implementasi Push Button merupakan sebuah device untuk menghubungkan dan memutuskan rangkaian listrik antara 2 titik. Kegunaan push button ini untuk mengatur/setting nilai ketinggian air pada level batas atas dan level batas bawah. Gambar tersebut bisa dilihat pada Gambar 4.8