1
Osilasi Sistem Tenaga Listrik Sebelum Dan Sesudah
Pemasangan Upfc Berbasis State Space Observer Dengan
Sinyal Masukan Sudut Fasa Booster
Suwarno
Muhammad
Irwanto
Teknik Elektro -FTI, Institut Teknologi Medan, Jln. Gedung Arca No. 52 Medan E-mail : [email protected]; [email protected]
Abstrak - Penelitian ini bertujuan untuk
menyelidiki osilasi sistem tenaga listrik sebelum dan sesudah pemasangan UPFC berbasis state space observer dengan sinyal masukan sudut fasa booster. Osilasi yang ditinjau berupa lewatan puncak dan lewatan maksimum dari perubahan sudut ayunan rotor, perubahan kecepatan putaran rotor, perubahan tegangan internal dan perubahan tegangan jangkar generator. Model sistem tenaga listrik didasarkan pada analisis mesin tunggal yang dihubungkan ke bus tak terbatas melalui saluran transmisi.
Penelitian ini diawali dengan membuat model matematik sistem tenaga listrik sebelum dan sesudah pemasangan UPFC ke dalam persamaan variabel keadaan, kemudian diterapkan state space observer. Kemampuan sistem tenaga listrik sesudah pemasangan UPFC dalam meredam osilasi perubahan sudut ayunan rotor, perubahan kecepatan putaran rotor, perubahan tegangan internal dan perubahan tegangan jangkar disebabkan memiliki nilai pole loop tertutup sebanyak lima, dengan menerapkan empat nilai pole loop tertutup yang sama pada sebelum dan sesudah pemasangan UPFC dan satu pole loop tertutup yang hanya dimiliki oleh sistem tenaga listrik sesudah pemasangan UPFC, maka sistem tenaga listrik sesudah pemasangan UPFC memiliki osilasi yang lebih baik dibandingkan sistem tenaga lsitrik sebelum pemasangan UPFC. Hasil penelitian dengan menerapkan pole loop tertutup
10 dan ; i 5 , 9 4 , 3 ; i 8 , 7 7 , 2 ± − ± − − memberikan
peredaman osilasi sistem tenaga listrik sesudah pemasangan UPFC lebih baik dibandingkan dengan sistem tenaga listrik sebelum pemasangan UPFC. Perbaikan osilasi yang dihasilkan berkisar 69% sampai 99%.
Keywords : Osilasi sistem tenaga listrik
,
UnifiedPower Flow Controller ,sudut fasa booster, state space observer.
1. PENDAHULUAN
Perbaikan osilasi sitem tenaga listrik dapat dilakukan dengan pemasangan UPFC (Unified
Power Flow Controller). UPFC merupakan peralatan elektronika daya yang dipasang pada saluran transmisi. UPFC terdiri dari exciting transformer (ET), boosting transformer (BT), dua gate turn-off (GTO) thyristor tiga fasa berbasis konverter sumber tegangan (voltage source converter), dan kapasitor hubung DC. Metode penelitian perbaikan osilasi sistem tenaga listrik dengan pemasangan UPFC dilakukan dengan membentuk model sistem tersebut dan dengan menambahkan sinyal power system stabilizer diterapkan ke sistem eksitasi.[1] Penelitian tersebut
kurang efektif karena masih menggunakan power system stabilizer diterapkan ke sistem eksitasi, sehingga diperlukan penelitian lebih lanjut mencari umpan balik yang diterapkan ke masukan UPFC. Oleh karenanya perlu menerapkan metode alternatif perbaikan osilasi sistem tenaga melalui sinyal masukan Unified Power Flow Controller (UPFC) sudut fasa booster berbasis state space observer , dimana dari state space observer memiliki nilai pole loop tertutup sebanyak lima, dengan menerapkan empat nilai pole loop tertutup yang sama pada sebelum dan sesudah pemasangan UPFC dan satu pole loop tertutup yang hanya dimiliki oleh sistem tenaga listrik sesudah pemasangan UPFC, maka sistem tenaga listrik sesudah pemasangan UPFC memiliki osilasi yang lebih baik dibandingkan sistem tenaga lsitrik sebelum pemasangan UPFC. Masalah ini sangat menarik untuk diteliti karena dengan adanya pemasangan Unified Power Flow Controller (UPFC) berbasis state space observer dengan sinyal masukan sudut fasa booster dapat memperbaiki osilasi sistem tenaga listrik .
1.1. Model Sistem Tenaga Listrik tanpa
Pemasangan UPFC
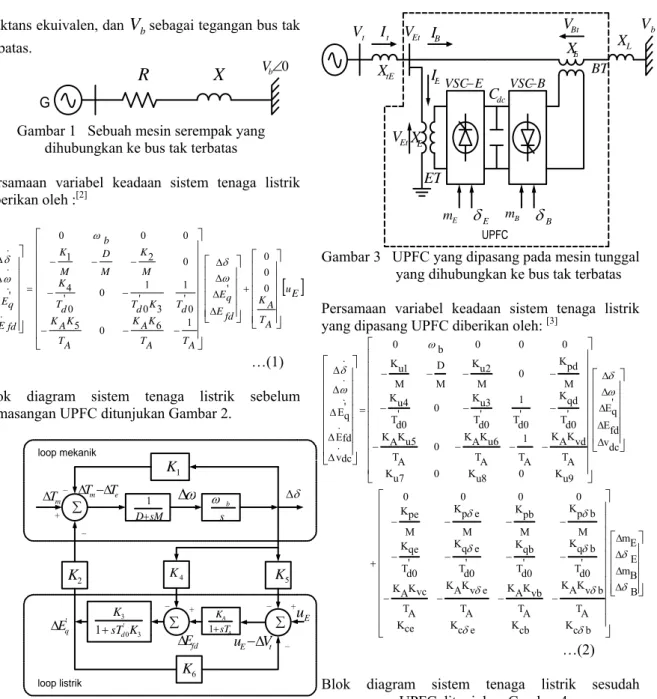
Model sistem tenaga listrik yang digunakan dalam penelitian ini didasarkan pada analisis SMIB (Single Mesin Infinite Bus), yaitu sebuah mesin serempak yang dihubungkan ke bus tak terbatas melalui saluran transmisi, seperti terlihat pada Gambar 1, dengan
G
sebagai mesin serempak,R
reaktans ekuivalen, dan
V
bsebagai tegangan bus tak terbatas. G 0 ∠ b VX
R
Gambar 1 Sebuah mesin serempak yang dihubungkan ke bus tak terbatas
Persamaan variabel keadaan sistem tenaga listrik diberikan oleh :[2]
[ ]
uE A T A K fd E q E A T A T K A K A T K A K d T K d T d T K M K M D M K b fd E q E ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ + Δ Δ Δ Δ − − − − − − − − = Δ Δ Δ Δ 0 0 0 ' 1 6 0 5 ' 0 1 3 ' 0 1 0 ' 0 4 0 2 1 0 0 0 . . ' . . ω δ ω ω δ …(1) Blok diagram sistem tenaga listrik sebelum pemasangan UPFC ditunjukan Gambar 2.2 K ∑ δ Δ 3 ' 0 3 1 sT K K d + A A sT K + 1 6 K 5 K ' q E Δ fd E Δ ∑ 4 K ∑ 1 K s b ω m T Δ ΔTm−ΔTe sM D+ 1 Δω + + + _ _ _ _ _ loop mekanik loop listrik E u t E V u −Δ
Gambar 2 Blok diagram sistem tenaga listrik sebelum pemasangan UPFC
1.2. Model sistem tenaga listrik dengan pemasangan UPFC
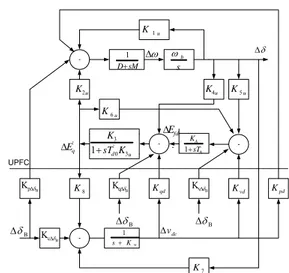
Model sistem tenaga listrik yang dipasang UPFC dalam penelitian ini terlihat pada Gambar 3.
t V It tE X Et V IB E I E X Et V ET E VSC− VSC−B dc C E m
δ
E mBδ
B Bt V B X BT L X b V UPFCGambar 3 UPFC yang dipasang pada mesin tunggal yang dihubungkan ke bus tak terbatas Persamaan variabel keadaan sistem tenaga listrik yang dipasang UPFC diberikan oleh: [3]
⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ Δ Δ Δ Δ − − − − − − − − − − − − + Δ Δ Δ Δ Δ − − − − − − − − − − − = Δ Δ Δ Δ Δ B B mE E m b c K cb K e c K ce K A T b v K A K A T vb K A K A T e v K A K A T vc K A K ' 0 d T b q K ' 0 d T qb K ' 0 d T e q K ' 0 d T qe K M b p K M pb K M e p K M pe K 0 0 0 0 dc vfd E ' q E 9 u K 0 8 u K 0 7 u K A T vd K A K A T 1 A T 6 u K A K 0 A T 5 u K A K ' 0 d T qd K ' 0 d T 1 ' 0 d T 3 u K 0 ' 0 d T 4 u K M pd K 0 M 2 u K M D M 1 u K 0 0 0 b 0 dc . v fd . E . ' q E . . δ δ δ δ δ δ δ δ δ δ ω δ ω ω δ …(2)
Blok diagram sistem tenaga listrik sesudah pemasangan UPFC ditunjukan Gambar 4.
3 u 2 K -Δδ u3 ' d0 u3 K sT 1 K + A A sT 1 K + u6 K u5 K ' q ΔE ΔEfd -u4 K -u1 K s ωb sM D 1 + Δω UPFC 8 u K Kpd u9 K s 1 + dc Δv u7 K e pδ K pe K Kpb Kpδb KqeKqδe Kqb KqδbKqd Kve Kvδe KvbKvδb Kvd e cδ K ce K cb K b cδ K E Δm B Δm E Δδ B Δδ
Gambar 4 Blok diagram sistem tenaga listrik sesudah pemasangan UPFC
Persamaan (2) merupakan model dinamik linear sistem tenaga yang dipasang UPFC, terlihat bahwa ada empat pilihan sinyal kendali masukkan UPFC untuk membuat fungsi peredam UPFC, yakni
B E B E
,
m
,
,
dan
m
Δ
Δ
δ
Δ
δ
Δ
[4]. Karenanyadalam perancangan pengendalian peredam UPFC pemilihan sinyal kendali masukkan UPFC sangat penting. Berdasarkan hal tersebut, jika sinyal kendali masukkan UPFC dipilih sudut fasa booster
Δ
δ
B , maka persamaan (2) menjadi :[
B]
b c A b v A d b q b p dc fd q u u u A vd A A A u A A u A d qd d d u d u pd u u b dc fd q K T K K T KM K v E E K K K T K K T T K K T K K T K T T K T K M K M K M D M K v E E δ ω δ ω ω δ δ δ δ δ Δ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ − − − + ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ Δ Δ Δ Δ Δ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ − − − − − − − − − − − = ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ Δ Δ Δ Δ Δ ' 0 ' 9 8 7 6 5 ' 0 ' 0 ' 0 3 ' 0 4 2 1 . . . ' . . 0 0 0 1 0 1 0 0 0 0 0 0 …(3) Blok diagram sistem tenaga listrik sesudah pemasangan UPFC untuk sinyal masukan sudut fasa boosterΔ
δ
B ditunjukan Gambar 5.u K2 -δ Δ u dK sT K 3 ' 0 3 1+ A A sT K + 1 u K6 u K5 ' q E Δ fd E Δ -u K4 -u K1 s b ω sM D+ 1 Δω UPFC B p KΔδ K8 KqΔδB Kqd KvΔδB Kvd Kpd B δ Δ B c KΔδ 9 1 K s+ dc v Δ 7 K B δ Δ ΔδB
Gambar 5 Blok diagram sistem tenaga listrik sesudah pemasangan UPFC untuk sinyal masukan
sudut fasa booster
Δ
δ
B1.3. State Space Observer
Sistem yang dinyatakan oleh persamaan keadaan Du Cx y Bu Ax . x + = + = …(4)
dapat dibentuk menjadi state space observer sebagai beriktu [5]
Ly
Bu
x
)
LC
A
(
x
^ ^ .+
+
−
=
…(5)dengan L penguat (gain) observer . Blok diagram observer terlihat pada gambar 6.
B 1/s C A u(t) x(t) y(t) 1/s B C A )t ( x^ )t ( x^ )t ( y ^ L y()t ∞
-}
Plant observerGambar 6 Blok diagram observer
3. METODA PENELITIAN
3.1. Data penelitian
Data sistem tenaga listrik dan UPFC sebagai plant yang dikendalikan diambil dari [1] dan [6].
1. Perangkat keras komputer PC dengan spesifikasi processor pentium II 300 MHz, memori 32 Mbytes, monitor GTC 14’’ digital future.
2. Program Matlab versi 5.3.1
3.3. Jalan penelitian
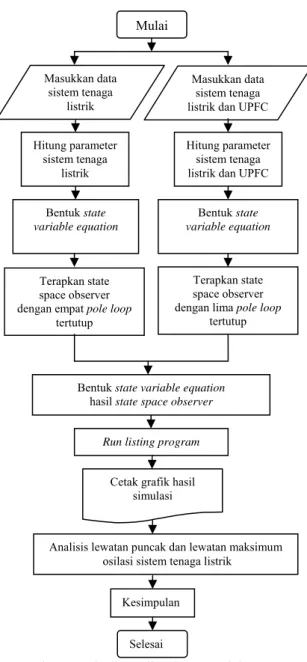
Tahapan pelaksanaan penelitian dapat digambarkan dengan diagram alir Gambar 7.
4. HASIL PENELITIAN DAN
PEMBAHASAN
Pole loop tertutup dalam penelitian ini
diberikan adalah
10
dan
;
i
5
,
9
4
,
3
;
i
8
,
7
7
,
2
±
−
±
−
−
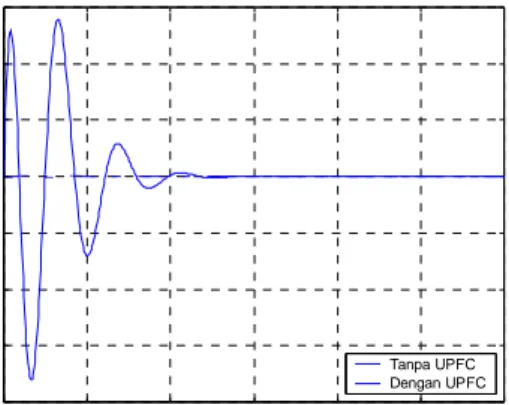
. Osilasisistem tenaga listrik sebelum dan sesudah pemasangan UPFC berbasis state space observer dengan sinyal masukan sudut fasa booster terlihat pada Gambar 8, Gambar 9, Gambar 10, dan gambar 11, masing-masing untuk perubahan sudut ayunan rotor, perubahan kecepatan rotor, perubahan tegangan internal, dan perubahan tegangan jangkar.
Gambar 7 Diagram alir tahapan pelaksanaan penelitian 0 1 2 3 4 5 6 -12 -10 -8 -6 -4 -2 0 2x 10 -7 Waktu (sec) P e ruba han s udut a y un an r o to r ( rad) Tanpa UPFC Dengan UPFC
Gambar 8 Osilasi perubahan sudut ayunan rotor sebelum dan sesudah pemasangan UPFC
Mulai
Masukkan data sistem tenaga listrik dan UPFC
Hitung parameter sistem tenaga
listrik
Hitung parameter sistem tenaga listrik dan UPFC
Bentuk state variable equation Bentuk state variable equation Terapkan state space observer dengan lima pole loop
tertutup
Bentuk state variable equation hasil state space observer
Run listing program
Cetak grafik hasil simulasi
Analisis lewatan puncak dan lewatan maksimum osilasi sistem tenaga listrik
Kesimpulan
Selesai Terapkan state
space observer dengan empat pole loop
tertutup Masukkan data
sistem tenaga listrik
5 0 1 2 3 4 5 6 -4 -3 -2 -1 0 1 2 3x 10 -6 Waktu (sec) P e rubahan k e c epat an rot o r (pu) Tanpa UPFC Dengan UPFC
Gambar 9 osilasi perubahan kecepatan rotor sebelumdan sesudah pemasangan UPFC
0 1 2 3 4 5 6 -2.5 -2 -1.5 -1 -0.5 0 0.5 1 1.5 2x 10 -3 Waktu (sec) P e rubahan t egang an i n te rnal ( pu) Tanpa UPFC Dengan UPFC
Gambar 10 osilasi perubahan tegangan internal sebelum dan sesudah pemasangan UPFC 0 1 2 3 4 5 6 -2 -1.5 -1 -0.5 0 0.5 1 1.5 Waktu (sec) P e rubahan t egang an j angk ar ( pu) Tanpa UPFC Dengan UPFC
Gambar 11 osilasi perubahan tegangan jangkar sebelum dan sesudah pemasangan UPFC
Nilai lewatan puncak dan lewatan maksimum osilasi sistem tenaga listrik sebelum dan sesudah pemasangan UPFC terlihat pada tabel 1.
Tabel 1 Nilai lewatan puncak dan lewatan maksimum osilasi sistem tenaga listrik sebelum
dan sesudah pemasangan UPFC
Gambar 8, Gambar 9, Gambar 10, Gambar 11 dan tabel 1 memperlihatkan bahwa lewatan puncak dan lewatan maksimum osilasi sistem tenaga listrik sesudah pemasangan UPFC memiliki peredaman yang lebih baik dibandingkan sistem tenaga listrik sebelum pemasangan UPFC. Perbaikan yang dihasilkan adalah:
1. Lewatan puncak
a. Lewatan puncak osilasi perubahan sudut ayunan rotor sebelum pemasangan UPFC sebesar 1,006x10-6 sesudah pemasangan
UPFC menjadi 1,737x10-7, sehingga
perbaikan yang dihasilkan 83%.
b. Lewatan puncak osilasi perubahan kecepatan rotor sebelum pemasangan UPFC sebesar 3,727x10-6 sesudah pemasangan UPFC
menjadi 1,14x10-6, sehingga perbaikan yang
dihasilkan 69%.
c. Lewatan puncak osilasi perubahan tegangan internal sebelum pemasangan UPFC sebesar 0,002196 sesudah pemasangan UPFC menjadi 0,00001375, sehingga perbaikan yang dihasilkan 99%.
d. Lewatan puncak osilasi perubahan tegangan jangkar sebelum pemasangan UPFC sebesar 1,806 sesudah pemasangan UPFC menjadi 0.01185, sehingga perbaikan yang dihasilkan 99%.
2. Lewatan maksimum
a. Lewatan maksimum osilasi perubahan sudut ayunan rotor sebelum pemasangan UPFC sebesar 3,8x10-7 sesudah pemasangan UPFC
menjadi 9,295x10-8, sehingga perbaikan yang
dihasilkan 76%.
b. Lewatan maksimum osilasi perubahan kecepatan rotor sebelum pemasangan UPFC sebesar 3,727x10-6 sesudah pemasangan
UPFC menjadi 1,14x10-6, sehingga perbaikan
yang dihasilkan 69%.
c. Lewatan maksimum osilasi perubahan tegangan internal sebelum pemasangan UPFC sebesar 0,002196 sesudah pemasangan
UPFC menjadi 0,00001375, sehingga perbaikan yang dihasilkan 99%.
d. Lewatan maksimum osilasi perubahan tegangan jangkar sebelum pemasangan UPFC sebesar 1,806 sesudah pemasangan UPFC menjadi 0.01185, sehingga perbaikan yang dihasilkan 99%.
5. KESIMPULAN
Berdasarkan hasil penelitian dapat disimpulkan sebagai berikut:
1. Model sistem tenaga listrik dipasang UPFC dengan sinyal masukan sudut fasa booster yang dibentuk ke dalam persamaan differensial linier, kemudian dibentuk persamaan variabel keadaan dan dengan menerapkan state space observer dapat digunakan untuk meninjau osilasi sistem tenaga listrik.
2. Penerapan pemasangn UPFC dengan sinyal masukan sudut fasa booster berbasis state space observer memberikan peredaman osilasi yang lebih baik dibanding dengan sistem tenaga listrik sebelum pemasangan UPFC. Perbaikan peredaman osilasi perubahan sudut ayunan rotor, perubahan kecepatan rotor, perubahan tegangan internal, dan perubahan tegangan jangkar berkesar 69% hingga 99%.
6. DAFTAR PUSTAKA
[1] Toufan, M., and Annakkage, U.D., 1998, Simulation of the Unified Power Flow Controller Performance Using PSCAD/EMTD, Electric Power Systems Research 46 (1998), pp. 67 –75.
[2] Padiyar, K.R., 1996, Power System Dynamis Stability and Control, pp. 191 – 268, John Wiley & Sons , Singapore.
[3] Irwanto M, 2002, Perbaikan Stabilitas Dinamis Sistem Tenaga Listrik Dengan Pemasangan UPFC berbasis Stabilizer Pada Saluran Transmisi, tesis, Universitas Gadjah Mada, Yogyakarta.
[4] Wang, H.F., 1999, Damping Function of Unified Power Flow Controller, IEE Proc. Gener. Transm. Distrib., Vol.146, No.1, pp. 81 - 87.
[5] Lewis,F.L. 2001, State Observer and Regulator Design.
[6] Anderson, P.M., and Fouad, A.A., 1977, Power System Control and Stability, pp. 208 – 232, Iowa State University Press, U.S.A.