WAHANA GERAK MANDIRI SEBAGAI
PERANGKAT PENDIDIKAN TEKNOLOGI INFORMASI
Kusprasapta Mutijarsa, [email protected]
Sekolah Teknik Elektro dan Informatika,
Institut Teknologi Bandung
ABSTRAK
Makalah ini membahas penggunaan wahana gerak mandiri sebagai perangkat pendidikan di Kelompok Keahlian Teknologi Informasi, Sekolah Teknik Elektro dan Informatika, Insitut Teknologi Bandung.
Agar mahasiswa memiliki kemampuan yang kuat terhadap bidang yang sedang dipelajarinya, mahasiswa memerlukan perangkat yang dapat memperlihatkan realisasi bidang ilmunya di dunia nyata. Wahana gerak mandiri adalah perangkat yang merupakan integrasi antara mekanik, elektronik dan komputer. Menggunakan wahana gerak mandiri, mahasiswa dapat mempelajari, mengimplementasikan dan mengembangkan konsep sistem mekanik, elektronik, komputasi serta pemrograman.
Terdapat berbagai kit wahana gerak mandiri komersial yang dijual, tetapi harganya sangat mahal dan tidak terjangkau. Untuk itu, pada makalah ini juga dibahas usaha yang telah dilakukan dalam membangun wahana gerak mandiri tersebut di lingkungan sendiri. Wahana gerak mandiri yang telah berhasil dikembangkan terdiri dari wahana riset berukuran besar yang diberi nama POEMAV, dan wahana berukuran kecil yang diberi nama robot tikus.
KATA KUNCI: wahana gerak mandiri, pendidikan, teknologi informasi, POEMAV, robot tikus
1. PENDAHULUAN
Saat ini, robotika dan otomasi sudah mulai meninggalkan sektor manufaktur dan menjadi bagian kehidupan manusia sehari-hari. Kehadiran robot sebagai bagian kehidupan sehari-hari seringkali tidak disadari, karena biasanya robot tidak terlihat berbentuk manusia seperti pada kebanyakan program televisi atau film. Sebagai contoh adalah robot penghisap debu. Robot tersebut terlihat seperti mesin
vacuum cleaner, bukan menyerupai petugas
kebersihan.
Perkembangan ini harus segera ditanggapi. Sudah saatnya organisasi pendidikan, baik di perguruan tinggi maupun sekolah menengah, mempersiapkan orang-orang yang memiliki keahlian di bidang robotika.
Di Kelompok Keahlian Teknologi Informasi (KK-TI) Sekolah Teknik Elektro dan Informatika (STEI) Institut Teknologi Bandung (ITB), terdapat kelompok penelitian yang bernama Autonomous Vehicle Research Group atau Kelompok Penelitian Wahana Gerak Mandiri. Dalam kelompok penelitian ini,
dikembangkan berbagai macam robot hingga wahana gerak mandiri yang memiliki bentuk serta fungsi berbeda-beda. Perangkat tersebut dikembangkan selain untuk penelitian, juga untuk mendukung kegiatan pendidikan di bidang teknologi informasi. 2. DARI ROBOTIKA MENUJU WAHANA
GERAK MANDIRI
Sebelum membahas lebih lanjut mengenai penggunaan wahana gerak mandiri sebagai perangkat pendidikan, pada bagian ini akan diulas terlebih dahulu pengertian robot hingga perkembangannya menjadi wahana gerak mandiri.
Kata “robot” mulai diperkenalkan pada tanggal 25 Januari 1921 di Praha, dalam suatu drama yang ditampilkan oleh Karel Capek berjudul R.U.R (Rossum’s Universal Robot) [2]. Dalam R.U.R, Rossum menciptakan suatu ras pekerja yang dibuat dari sekumpulan bahan organik dan biologis. Ras pekerja tersebut memiliki kecerdasan untuk menggantikan manusia dalam melakukan berbagai pekerjaan (karena itu disebut “universal”). Capek
menyebut pekerja tersebut sebagai robot, suatu istilah yang diturunkan dari bahasa Chechnya “robota” yang artinya pekerja kasar. Robot-robot pekerja tersebut secara implisit memperlihatkan bahwa makhluk-makhluk buatan secara tegas adalah pelayan manusia. Kemudian terjadi pergeseran, dari robot sebagai pelayan yang dibentuk dari komponen-komponen biologis menjadi pelayan menyerupai manusia yang dibentuk dari komponen-komponen mekanik. Hal ini terlihat pada beberapa fiksi ilmiah. Tercatat tiga film klasik, Metropolis (1926), The Day the Earth Stood
Still (1951), dan Forbidden Planet (1956),
memperlihatkan bahwa robot berasal dari komponen mekanik, bukan komponen biologis seperti pada drama Capek [2].
Sementara itu, komputer mulai umum digunakan dalam industri dan komputasi. Robot terlihat semakin nyata. Hal ini terlihat dari digunakannya lengan robot pada otomasi industri untuk memindahkan komponen-komponen hasil rakitan. Dalam otomasi pabrik, istilah robot lebih diartikan pada jenis pekerjaan yang tidak berfikir dan dilakukan secara berulang-ulang.
Dalam perkembangannya, robot tidak lagi bekerja secara berulang-ulang terus menerus tanpa berfikir seperti yang digunakan pada otomasi industri. Robot menjadi makhluk mekanik yang memiliki kecerdasan agar dapat bekerja secara mandiri. Istilah makhluk
mekanik untuk menyatakan bahwa robot
menggunakan komponen mekanik sebagai komponen dasar, bukan menggunakan komponen biologis.
Bekerja secara mandiri berarti robot dapat beroperasi
dan bekerja sendiri pada berbagai kondisi tanpa membutuhkan bantuan dari operator atau manusia. Robot dapat berinteraksi dengan dunianya, seperti bergerak, berpindah tempat, mengubah kondisi lingkungan (seperti mematikan lampu) atau mengubah kondisi dirinya sendiri (seperti memperbaiki komponen yang rusak) dan terus bekerja hingga tujuannya tercapai. Selanjutnya, makhluk mekanik cerdas yang dapat bekerja secara mandiri disebut wahana gerak mandiri.
Salah satu contoh populer wahana gerak mandiri adalah Terminator, yang terdapat pada film dengan judul sama produksi tahun 1984. Walaupun kehilangan satu kamera (mata) dan penutup eksternalnya (kulit dan daging) terbakar, tetapi ia dapat beradaptasi untuk terus mengejar targetnya (Sarah Connor). Ini adalah contoh wahana gerak mandiri yang sangat ekstrim dan menakutkan. Contoh lain yang nyata adalah Marvin [5], robot
kereta surat yang digunakan di kantor FBI Baltimore, seperti yang diberitakan dalam artikel di Denver Post pada tanggal 9 November 1996. Marvin mampu menyelesaikan pekerjaannya dalam mengantarkan surat, bergerak dan berhenti sambil beradaptasi dengan orang-orang yang berjalan lalu lalang melintas di sekitarnya pada waktu dan tempat yang tidak dapat diperkirakan sebelumnya.
3. WAHANA GERAK MANDIRI SEBAGAI PERANGKAT PENDIDIKAN
Berdasarkan penjelasan di atas, dapat disimpulkan bahwa wahana gerak mandiri merupakan perangkat elektronik-mekanik-komputer yang tersusun menjadi suatu wahana cerdas yang mampu meraba dan membuat model lingkungan menggunakan sensor-sensor yang dimilikinya, dapat mengingat situasi lingkungan yang teraba dan dapat berfikir sendiri untuk merencanakan aksi dalam menghadapi berbagai situasi dalam lingkungannya.
Hal ini berarti wahana gerak mandiri tidak dapat dilihat dari sisi mekanik dan elektronik saja, tetapi harus dilihat dari sisi kemampuan komputasinya. Kemandirian yang dimiliki wahana sangat tergantung dari kecerdasan yang diprogramkan kepadanya. Salah satu mata kuliah di bidang Teknologi Informasi adalah “Dasar Intelejensia Artifisial”. Pada kuliah tersebut dibahas berbagai metoda yang dikembangkan untuk membuat suatu mesin menjadi cerdas. Agar kecerdasan mesin dapat terlihat di dunia nyata, maka kecerdasan tiruan tidak dapat direalisasikan pada simulasi komputer saja, tetapi harus terlihat di dunia nyata, yang dalam hal ini diimplementasikan pada wahana gerak mandiri. Mata kuliah lain di bidang Teknologi Informasi adalah “Antarmuka Manusia-Mesin” (Man-Machine
Interface). Pada awalnya, kuliah ini membahas
antarmuka antara manusia dengan komputer. Dalam perkembangan selanjutnya, antarmuka tidak selalu dilakukan dengan komputer saja, tetapi terdapat mesin lain, seperti wahana gerak mandiri. Selain dua kuliah tersebut, masih terdapat kuliah-kuliah lain yang dapat memanfaatkan perangkat wahana gerak mandiri.
Untuk mendukung perkuliahan-perkuliahan tersebut, maka diperlukan adanya perangkat wahana gerak mandiri. Di pasaran, banyak terdapat berbagai kit robotik yang dapat digunakan, tetapi harganya sangat mahal dan tidak terjangkau. Oleh karena itu, Kelompok Penelitian Wahana Gerak Mandiri KK-TI STEI ITB mencoba untuk membangun sendiri wahana gerak mandiri tersebut.
Pada tulisan ini, dibahas dua buah wahana gerak mandiri yang telah dibangun. Pertama adalah wahana riset berukuran besar yang diberi nama POEMAV. Kedua adalah wahana berukuran mini yang disebut robot tikus.
4. POEMAV
POEMAV adalah wahana gerak mandiri berbentuk silinder dengan diameter 50 cm dan tinggi 1 meter. POEMAV beroperasi dalam ruang tertutup, dilengkapi dengan 14 pasang sensor ultrasonik pendeteksi lingkungan yang terpasang di sekeliling badannya, encoder dan sensor optocoupler untuk mendeteksi posisi wahana dalam lingkungan kerjanya, dua buah roda yang digerakkan oleh motor DC, terpasang di bagian kanan dan kiri wahana. Pengendalinya menggunakan sebuah PC yang dibantu dengan 2 buah mikrokontroler. PC berfungsi sebagai pengendali utama (otak wahana), sementara mikrokontroler berfungsi sebagai pengendali antarmuka ke perangkat sensor, motor, devais masukan dan perangkat periferal lainnya. Komunikasi antara PC dengan mikrokontroler menggunakan port serial dan port paralel. Blok perangkat keras POEMAV dan bentuk fisiknya dapat dilihat pada gambar 1 dan 2.
Gambar 1. Blok perangkat keras
Gambar 2. Bentuk fisik POEMAV
POEMAV (Path Planning – Obstacle Avoidance –
Position Estimation – Mapping – Autonomous
Vehicle) adalah wahana gerak mandiri yang pertama
kali dibangun dengan konfigurasi dan kemampuan navigasi lengkap. Sesuai dengan namanya POEMAV memiliki kemampuan untuk merencanakan jalur pergerakan dari suatu posisi ke posisi lain yang ditentukan, memiliki kemampuan untuk menghindari tabrakan dengan rintangan yang ditemui sepanjang perjalanannya, baik rintangan yang bersifat statis maupun dinamis. Selain itu POEMAV juga memiliki kemampuan untuk menentukan posisinya setiap saat di dalam lingkungan kerja berdasarkan informasi dari sensor-sensor posisi yang terpasang padanya, dan juga memiliki kemampuan untuk membuat peta lingkungan kerjanya. Keseluruhan kemampuan tersebut bergabung membentuk sistem navigasi dengan arsitektur diperlihatkan pada gambar 3.
J a ra k b e n d a k e s e n s o r X b o t, Y b o t, T h e ta b o t x ,y ,C V [x ,y ] X b o t, y b o t, x g o a l, y g o a l X g o a llo k a l, y g o a llo k a l
Saat ini, perencanaan jalur (path planning) sudah diprogram menggunakan metoda A*, penghindaran tabrakan (obstacle avoidance) menggunakan metoda
Vector Field Histogram, estimasi posisi (position
estimation) menggunakan metoda dead reckoning/
odometri, dan pemetaan menggunakan metoda
Histogram in Motion Mapping [3]. Keseluruhan
metoda navigasi ini diprogram pada PC utama, agar dapat diganti-ganti dengan metoda lain secara fleksibel.
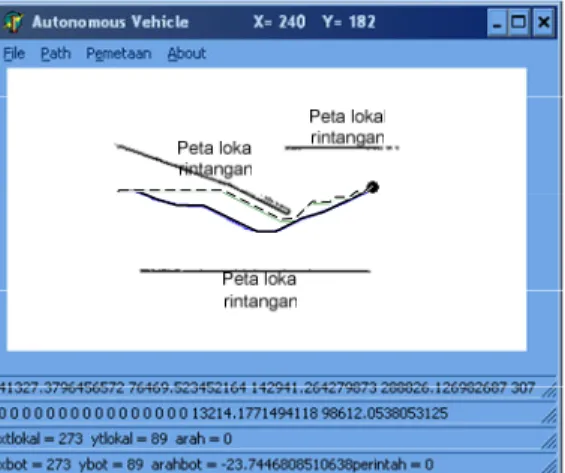
Fleksibilitas yang dimiliki POEMAV memungkinkan mahasiswa untuk belajar dan meneliti menggunakannya. Mahasiswa dapat menambah sensor-sensor lain yang diperlukan dengan mudah, misalnya sensor kompas, sensor bumper, sensor infra merah dan lain-lain. Mahasiswa yang sedang mempelajari bidang ilmu AI dapat mempraktekkannya pada wahana ini, seperti merealisasikan algoritma pencarian (searching) untuk mencari dan merencanakan jalur pergerakan wahana, atau menggunakan metoda fuzzy untuk penghindaran tabrakan. Simulasi pergerakan POEMAV diperlihatkan pada gambar 4.
Gambar 4. Simulasi gerak POEMAV
5. ROBOT TIKUS
Robot tikus adalah wahana gerak mandiri berukuran kecil yang beroperasi dalam lingkungan labirin. Robot ini berukuran 13 cm x 13 cm, bergerak dalam labirin selebar 18 cm. Robot tikus ini digunakan untuk mengimplementasikan konsep-konsep AI, khususnya konsep pencarian (searching). Robot tikus bekerja mencari suatu lokasi dalam labirin yang belum terpetakan.
Selain digunakan untuk pendidikan dan penelitian, robot tikus juga merupakan robot lomba. Lomba ini
dimulai sejak lama, Mei 1977, dengan nama US
Amazing Micromouse Maze Contest. Pada bulan
Agustus 1985, diselenggarakan “The First World Micromouse Contest” di Jepang. Sejak saat itu, jumlah kompetisi robot tikus semakin meningkat. Dalam waktu lima tahun berikutnya, terdapat 100 kompetisi yang diselenggarakan oleh berbagai institusi pendidikan di berbagai negara [4]. Aturan kompetisinya distandarkan dalam IEEE Micromouse Rules [4].
Robot tikus yang dibuat memiliki tiga buah sensor infra merah pendeteksi lingkungan yang terpasang di samping kanan, kiri serta depan. Pengendali menggunakan mikrokontroler AT89C51, dan penggerak menggunakan dua buah motor stepper yang dipasang di sebelah kanan dan kiri robot. Blok perangkat keras robot tikus diperlihatkan pada gambar 5. Penampang dan bentuk fisiknya diperlihatkan pada gambar 6 dan gambar 7.
Gambar 5. Blok perangkat keras
Gambar 7. bentuk fisik robot tikus
Terdapat berbagai metoda pencarian pada AI yang dapat digunakan untuk mencari suatu posisi pada labirin, seperti metoda Depth First Search (DFS), metoda Breadth First Search (BFS), metoda Best First Search (BFS), metoda A* dan lain-lain [6]. Setiap metoda memiliki kemampuan, karakteristik dan keunggulan yang berbeda-beda. Agar perbedaan setiap metoda dapat terlihat secara nyata, perlu direalisasikan dalam perangkat di dunia nyata, tidak hanya sebatas simulasi saja.
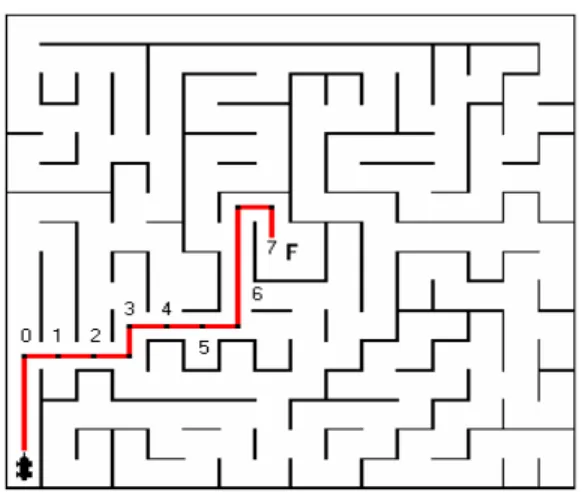
Gambar 8 memperlihatkan labirin tempat beroperasi robot tikus. Gambar 9 memperlihatkan hasil eksplorasi robot tikus dalam labirin.
Gambar 8. Labirin standar IEEE
Gambar 9. Eksplorasi robot tikus
6. PENUTUP
Masih terdapat wahana gerak mandiri lainnya yang telah dan sedang dikembangkan di Kelompok Penelitian Wahana Gerak Mandiri, KK-TI STEI ITB. Diantaranya robot pemadam api, robot vaccum cleaner, robot pencari korban gempa, robot patroli, wahana perangkat bantu lansia, wahana perangkat bantu tuna netra. Robot pemadam api, robot vaccum
cleaner, robot pencari korban bencana merupakan
wahana yang sudah dilombakan secara internasional. Wahana gerak mandiri tersebut dikembangkan sebagai tugas akhir S1, tesis S2 dan disertasi S3. Hasilnya, selain digunakan sebagai pembelajaran dan lomba, juga dilakukan ekstraksi ilmu dari hasil penelitian yang telah dilakukan. Ilmu-ilmu yang diperoleh dari hasil ekstraksi tersebut digunakan untuk meningkatkan kualitas pendidikan dan penelitian.
7. UCAPAN TERIMA KASIH
Ucapan terima kasih dan penghargaan setinggi-tingginya diberikan kepada Prof. Adang Suwandi Ahmad sebagai penggagas dan perintis kegiatan penelitian wahana gerak mandiri. Ucapan terima kasih juga diberikan kepada seluruh mahasiswa dan alumni Autonomus Vehicle Research Group ITB yang telah bersama-sama menekuni penelitian di bidang wahana gerak mandiri.
8. REFERENSI
[1] Bruder, Stephen; Wedeward, Kevin; “Robotics in the Classroom”, IEEE Robotics and Automation Magazine, September 2003.
[2] Dudek, Gregory; “Computational Principles of Mobile Robotics”, Cambridge University Press, 2000
[3] Gideon, Ferry Rippun; Ahmad, Adang Suwandi; Mutijarsa, Kusprasapta; “POEMAV SISKOG SUND 05 Pengembangan Model Enjiniring Wahana Gerak Mandiri” Prosiding Seminar of Intelligent Technology and Its Applications (SITIA 2004), ITS, 2004
[4] Kusprasapta Mutijarsa, Budi Krisnawan, Adang Suwandi Ahmad, “Membangun Robot Tikus Cerdas”, Prosiding Seminar Nasional The World of Automation, Unpar Bandung, 2003
[5] Murphy, Robin; “Introduction to AI Robotics”, The MIT Press, 2002
[6] Russel, Stuart; Norvig, Peter; “Artificial Intelligence, A Modern Approach”, Prentice