1 I.1. Latar Belakang
Kehidupan masyarakat saat ini sangat tergantung kepada sumber daya energi, salah satunya adalah energi listrik. Keberadaan energi listrik sudah merupakan sebuah keharusan sebagai penggerak roda kehidupan masyarakat. Kebutuhan listrik akan meningkat seiring dengan perkembangan jumlah penduduk. Seluruh aspek kegiatan masyarakat mulai dari rumah tangga, instansi-instansi pemerintah, perkantoran, pertambangan, industri, perbankan maupun bisnis selalu memerlukan listrik.
Sekarang ini masih banyak wilayah Indonesia yang kekurangan pasokan listrik, seperti Kabupaten Balikpapan Utara dan Kabupaten Penajam Pasir Utara, Kalimantan Timur. Untuk memenuhi kebutuhan listrik di ke dua kabupaten ini dan sekitarnya, PLN akan membangun Pembangkit Listrik Tenaga Uap (PLTU) di Desa Teluk Woru, Kecamatan Kariangau, Kabupaten Balikpapan Utara, yang selanjutnya energi listrik tersebut akan disalurkan ke Kabupaten Penajam Pasir Utara melalui kabel laut jalur transmisi 150 kV. Rute kabel laut ini direncanakan akan dimulai dari area landing point yang terletak di PLTU Kariangau, selanjutnya melalui perairan Teluk Balikpapan sampai ke area landing point yang rencananya digunakan sebagai Gardu Induk (GI) Petung yang terletak di Kabupaten Penajam.
Salah satu tahapan yang harus dilakukan dalam pembangunan kabel laut ini adalah penentuan rute kabel laut yang optimal. Rute kabel laut yang optimal dapat diperoleh dengan melakukan desain yang didasarkan pada data dan informasi yang lengkap dan akurat. Salah satu data dan informasi yang sangat diperlukan dalam desain dan pemasangan kabel laut ini adalah peta situasi/kontur. Peta kontur yang akurat dapat diperoleh dengan melakukan survei lapangan yang dikerjakan sesuai spesifikasi pekerjaan. Mengingat rencana rute pemasangan kabel laut tersebut terbentang dari area landing point Kariangau yang terletak di darat, selanjutnya melalui perairan Teluk Balikpapan dan berakhir di area landing point Penajam yang
terletak di darat juga maka memerlukan peta topografi di ke dua area landing points tersebut dan peta batimetri perairan Teluk Balikpapan.
Landing point sisi Kariangau terletak di area PLTU Kariangau, Desa Teluk
Woru, Kecamatan Kariangau, Kabupaten Balikpapan Utara, Kalimantan Timur.
Landing point ini terletak di pinggir pantai dengan luas area kurang lebih 1 Ha. Landing point sisi Penajam terletak di Desa Penajam, Kecamatan Penajam,
Kabupaten Penajam Pasir Utara, Kalimantan Timur. Landing point ini terletak di pinggir pantai dengan luas area kurang lebih 6 Ha. Pada landing pointdi sisi Penajam ini rencananya akan dibangun Gardu Induk Petung. Mengingat ke dua lokasi landing
points ini terletak dipinggir pantai maka pembuatan peta topografi/kontur harus
mempertimbangkan fenomena pasang surut di ke dua daerah ini, apalagi di area
landing point Penajam akan dibangun Gardu Induk. Kontur yang terdapat dalam ke
dua peta topografi area landing points ini harus terdefinisi dengan baik terhadap
Mean Sea Level (MSL) maupun Chart Datum (CD).
Landing points Kariangau dan Penajam dipisahkan oleh perairan Teluk
Balikpapan kurang lebih sepanjang 8 km. Pembuatan peta kontur/batimetri di perairan ini harus dilakukan melalui survei batimetri. Untuk memperoleh peta batimetri yang akurat di perairan ini diperlukan pengamatan pasang surut dan survei batimetri yang sesuai spesifikasi pekerjaan. Kontur yang terdapat dalam peta batimetri ini, juga harus terdefinisi dengan baik terhadap MSL maupun Chart Datum. Selain itu, dilakukan juga survei titik kontrol GPS untuk mendapatkan titik kontrol pemetaan.
Kegiatan aplikatif ini akan menentukan nilai MSL dan Chart Datum di perairan Teluk Balikpapan, membuat peta topografi di ke dua area landing points, membuat peta batimetri sepanjang rencana rute pemasangan kabel laut, serta menggabungkan kedua peta topografi dan peta batimeri tersebut dalam satu referensi tinggi dalam hal ini menggunakan Chart Datum.
I.2. Lingkup Kegiatan
Lingkup kegiatan aplikatif ini dilakukan agar kegiatan lebih terarah dan sesuai dengan tujuan. Lingkup kegiatan aplikatif ini menggunakan kriteria sebagai berikut:
1. Pada kegiatan ini pengamatan pasut dilakukan hanya di sisi Penajam. Pengamatan dilakukan di stasiun pasut/palem yang berada di anjungan dermaga Sub Pos TNI AL Penajam, Perairan Teluk Balikpapan, Kalimantan Timur dengan posisi koordinat geodetik 01° 14’ 38” LS dan 116° 46’ 44” BT. Pengamatan pasut dilakukan selama 29 piantan (hari) mulai dari tanggal 8 September sampai 6 Oktober 2013 dengan interval pengamatan per 1 jam.
2. Datum tinggi yang digunakan untuk pembuatan peta topografi dan peta batimetri adalah Chart Datum. Adapun nilai Chart Datum yang digunakan ditentukan berdasarkan nilai Z0 menurut definisi IHO yaitu
terhadap MSL.
3. Metode yang digunakan untuk penentuan konstanta-konstanta harmonik pasut dan MSL adalah metode Admiralty.
4. Datum horizontal pembuatan peta topografi dan peta batimetri mengacu datum WGS’84, hal ini mengingat titik-titik kontrol pemetaan untuk pembuatan peta topografi dan peta batimetri diikatkan terhadap titik ITRF BAKO yang terletak di Cibinong, Bogor.
5. Spesifikasi survei batimetri dilakukan dengan lebar koridor 300 m dengan interval lajur memanjang (lajur utama) sebesar 20 m dan interval lajur silang sebesar 200 m (10 kali interval lajur utama). Ketetelitian pengukuran survei batimetri didasarkan pada ketentuan IHO STANDARDS FOR HYDROGRAPHIC SURVEYS (SP-44) 5th Edition February 2008.
6. Area pengukuran topografi di area landing point Kariangau kurang lebih seluas 1 Ha, di area landing point Penajam seluas kurang lebih 6 Ha. Pengukuran dilakukan dengan alat Total Station dan GPS RTK Radio.
I.3. Tujuan Tujuan kegiatan aplikatif ini meliputi:
1. Menentukan nilai konstanta harmonik dan tipe pasang surut di Teluk Balikpapan.
2. Menentukan nilai Chart Datum (CD) dan Mean Sea Level (MSL) di Teluk Balikpapan serta hubungan geometri keduanya.
3. Membuat peta topografi area landing point PLTU Kariangau di Kariangau dan landing point Gardu Induk Petung di Penajam.
4. Membuat peta batimetri sepanjang jalur yang membentang antara ke dua
landing points.
5. Menggabungkan peta topografi dan peta batimetri yang tinggi dan kedalamannya mengacu pada Chart Datum.
I.4. Manfaat Manfaat kegiatan aplikatif ini antara lain:
1. Diperolehnya informasi pasang surut disekitar wilayah Teluk Balikpapan yang bermanfaat untuk perencanaan desain gantry di Gardu Induk Petung sisi Penajam dan di landing point Kariangau.
2. Diperolehnya peta gabungan antara peta topografi dan peta batimetri di area survei yang dapat digunakan sebagai data dan informasi untuk mendesain rute pemasangan kabel laut jalur transmisi 150 kV yang optimal.
I.5. Landasan Teori I.5.1. Pasang Surut
Pasang surut adalah fenomena naik turunnya permukaan air laut secara periodik yang disebabkan oleh pengaruh gravitasi benda-benda langit terutama bulan dan matahari (Poerbandono & Djunarsjah, 2005). Pasang surut adalah naik turunnya permukaan air laut secara periodik yang disebabkan oleh pengaruh gaya tarik benda-benda langit terutama bulan dan matahari di bumi yang berotasi (IHO, 2008). Meskipun massa matahari lebih besar dibanding dengan massa bulan, akan tetapi
gaya pembangkit pasang oleh matahari jauh lebih kecil dibanding dengan gaya yang dihasilkan oleh bulan. Hal ini dikarenakan jarak matahari yang terlalu jauh bila dibandingkan dengan jarak bumi dengan bulan (Poerbandono & Djunarsjah, 2005).
Terdapat beberapa teori mengenai pasut, yaitu teori kesetimbangan (Equilibrum) pertama kali dikemukakan oleh Sir Isaac Newton yang menjelaskan bahwa seluruh permukaan bumi diasumsikan tertutup oleh permukaan air dengan densitas yang sama dan naik turunnya muka air laut sebanding dengan gaya pembangkit pasut. Teori dinamis, dikemukakan pertama kali oleh Laplace. Pada teori Laplace menyatakan bahwa gelombang pasut yang terbentuk dipengaruhi oleh gaya pembangkit pasut, kedalaman dan luas perairan, pengaruh rotasi bumi, dan pengaruh gesekan dasar. Teori ini melengkapi teori kesetimbangan sehingga sifat-sifat pasut dapat diketahui secara kuantitatif (Priyana, 1994).
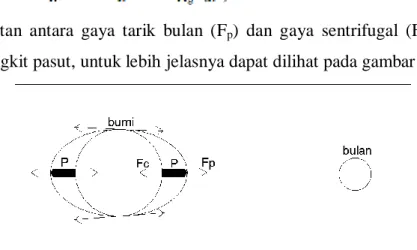
Gaya Pembangkit Pasut (GPP) merupakan resultan gaya tarik bulan matahari dan gaya sentrifugal. Arah gaya sentrifugal menjauh dari bulan, sedangkan arah gaya tarik bulan menuju pusat bulan dan besarnya tergantung jaraknya ke pusat bulan. Gaya yang sangat berpengaruh terhadap pasang surut dapat dilihat pada gambar I.1.
Gambar I.1. Gaya pembangkit pasut (Sumber: Poerbandono & Djunarsjah, 2005) 1. Gaya sentrifugal yang berfungsi sabagai penyeimbang.
2. Gaya tarik bulan
... (I.2) Resultan antara gaya tarik bulan (Fp) dan gaya sentrifugal (Fc) merupakan
gaya pembangkit pasut, untuk lebih jelasnya dapat dilihat pada gambar I.2.
Gambar I.2. Arah gaya sentrifugal dan gaya gravitasi bulan (Sumber : Poerbandono & Djunarsjah, 2005)
Dari gambar I.2, maka dapat dihitung GPP dengan rumus sebagai berikut :
... (I.3) Dalam hal ini :
Fc : gaya sentrifugal Fp : gaya tarik bulan Mm : massa bulan
Me : massa bumi
G : konstanta gaya gravitasi universal (6.67 x 10-11newton.m2/kg2) g : konstanta gaya gravitasi
a : jari-jari bumi
r : jarak antara pusat bumi dan pusat bulan R : jarak dari pusat bulan ke permukaan bumi P : gaya pembangkit pasut
I.5.1.1. Analisis harmonik pasut. Kedudukan muka tinggi air laut di setiap tempat adalah bervariasi. Variasi ketinggian ini disebabkan dari hasil penggabungan atau superposisi berbagai gelombang komponen harmonik pasut. Tujuan analisis pasut adalah menguraikan gelombang pasut menjadi gelombang tunggal berdasarkan pada konstanta harmonik pasut yang memiliki karakteristik berbeda. Penguraian
konstanta harmonik ini berdasarkan pada nilai amplitudo dan kelambatan fase masing-masing gelombang.
Amplitudo dan kelambatan fase diperoleh dari pengamatan pasut dalam jangka waktu tertentu. Pengamatan pasut, idealnya dilakukan selama 18,6 tahun (Dahuri, dkk., 2001). Analisa harmonik pasang surut dapat dilakukan dengan beberapa metode, seperti:
1. Metode hitungan kuadrat terkecil 2. Metode Admiralty
Pada penelitian ini metode yang digunakan untuk menghitung analisis harmonik pasut adalah metode Admiralty. Metode Admiralty telah lama digunakan dan dikenal luas, semenjak dikembangkannya analisa harmonik oleh Doodson pada tahun 1921. Metode Admiralty digunakan untuk menghitung konstanta harmonik pasang surut dengan menggunakan data pengamatan pasang surut selama 15 piantan atau 29 piantan. Adapun perhitungan yang telah dikembangkan oleh Doodson untuk jangka pendek diperlukan tabel-tabel untuk mempermudah perhitungan, karena pada saat itu perhitungan dilakukan dengan perhitungan tangan. Hasil yang didapatkan dari metode ini adalah besaran amplitudo (A) dan kelambatan fase (g) dari 9 konstanta harmonik pasut yaitu M2, S2, N2, K2, K1, O1, P1, M4 dan MS4. Amplitudo
dan kelambatan fase ini kemudian digunakan untuk menetukan harga Zo dan
menganalisis pasang surut daerah survei yang bersangkutan (Armono, 2005).
Dalam perhitungan metode Admiralty terdapat dua parameter, yaitu parameter yang tetap dan parameter yang berubah terhadap waktu.
1. Parameter tetap
Perhitungan metode Admiralty dimulai dengan serangkaian proses perhitungan parameter tetap, yaitu perhitungan proses harian, proses bulanan dan perhitungan matriks. Proses harian adalah dilakukan untuk menyusun kombinasi dari tinggi muka laut per-jam dari setiap hari pengamatan, sehingga dari kombinasi ini akan dikelompokkan besarnya pasang surut berdasarkan tipenya. Dimana n=1, n=2 dan n=4 yang masing-masing mempresentasikan tipe pasut diurnal, semidiurnal dan quarterdiurnal. Perhitungan proses bulanan bertujuan untuk mengelompokkan kedalam beberapa grup berdasarkan osilasi periode per bulan. Proses perhitungan matrik ini dilakukan dengan menyusun kombinasi sedemikian rupa sehingga
pemisahan tiap komponen dapat diperbesar lagi, dengan cara menyusun kombinasi yang tepat dari pengaruh tiap komponen kedua menjadi sangat kecil terhadap komponen utamanya, sehingga secara numerik komponen sekundernya dapat diabaikan.
2. Parameter yang berubah terhadap waktu
Parameter yang bergantung waktu dihitung berdasarkan waktu pengamatan dan besarnya tidak dipengaruhi oleh data pasang surut seperti pada proses harian dan bulanan. Parameter ini dihitung berdasarkan teori pengembangan pasut setimbang, dimana dalam teori pengembangan pasut parameter tersebut merupakan fungsi dari parameter orbital bulan dan matahari yaitu s, h, p, p’, dan yang menghasilkan komponen pasut yang berbeda-beda. Dalam prakteknya perhitungan pasang surut hanya berbagai komponen terpenting saja yang diperhitungkan, yaitu :
s : menyatakan longitude rata-rata dari bulan semu h : menyatakan longitude rata-rata dari matahari semu
p : menyatakan longitude rata-rata dari titik perigee dari orbital bulan semu N : menyatakan longitude rata-rata dari titik ascending node (titik nodal) Perhitungan nilai s, h, p dan N dapat dilihat pada persamaan di bawah ini:
S = 277,025 + 129,38481 (Y- 1900) + 13,17640 ( D+l ) ... (I.4) H = 280,190 – 0,23872 (Y- 1900) + 0,98565 ( D+l ) ... (I.5) p = 334,385 + 40,66249 (Y- 1900) + 0,11140 ( D+l ) ... (I.6) N = 259,157 – 19,32818 (Y- 1900) – 0,05295 ( D+l ) ... (I.7) Y = tahun dari tanggal tengah pengamatan
D = jumlah hari yang berlalu dari jam 00.00 pada tanggal 1 januari tahun tersebut sampai jam 00.00 tanggal pertengahan pengamatan.
l = bagian integral tahun =
Dari beberapa parameter orbital beberapa komponen harmonik yang sebagian besar bergantung kepada faktor N (mean longitude of ascending node). Diantaranya adalah parameter f dan u. Parameter f dan u merupakan besarnya koreksi amplitudo dan fase yang timbul akibat adanya variasi nodal yang memiliki periode 18,61 tahun. Parameter V merupakan jumlah dari V’ dan V”, harga V menyatakan besarnya fase
V ini juga dihitung dari kombinasi parameter orbital bulan dan matahari. Parameter W+1 dan w merupakan besaran gangguan atau koreksi amplitudo dan fase dari komponen mayor terhadap komponen minornya. Dimana setiap kelompok terdapat komponen mayor dan minor, komponen mayor dianggap sebagai komponen utama yaitu S2, K1 dan N2.
Prediksi elevasi pasut dapat dilakukan setelah menentukan amplitudo dan kelambatan fase pasut dari satu rangkaian data pasut pada stasiun pasut. Prediksi elevasi pasut adalah memperkirakan tinggi muka air laut untuk waktu berikutnya atau setelah periode pengamatan pasut. Persamaan elevasi pasut dapat dilihat pada persamaan I.8 (Ali, dkk., 1994).
... (I.8) dimana :
η(t) : elevasi pasang surut sebagai fungsi dari waktu Ai : konstanta harmonik dari komponen ke-i,
ωi : 2π/ Ti, (T: periode dari konstanta pasang surut i)
P1 : fase dari konstanta i
S0 : tinggi muka laut rata-rata (Mean Sea Level)
SS0 : perubahan tinggi muka laut yang disebabkan oleh faktor meteorologis
fi : faktor koreksi amplitude konstituen pasut ke-i
xi : argument astronomi konstituen pasut ke-i
t : waktu pengamatan
N : jumlah konstanta pasut yang ditinjau
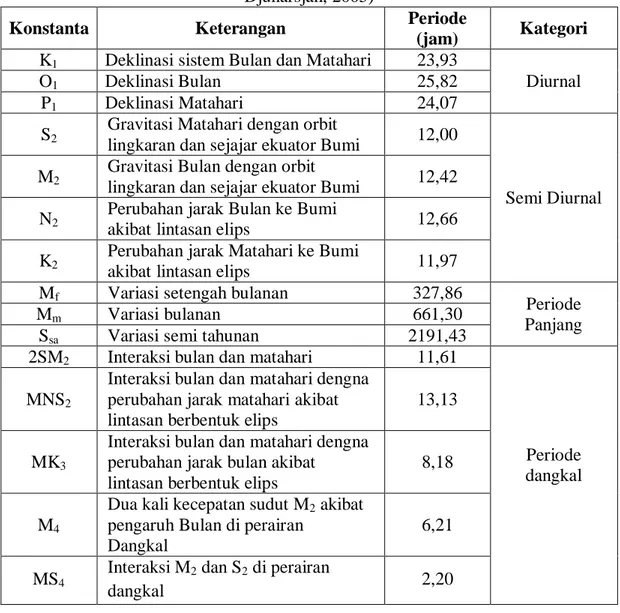
I.5.1.2. Konstanta-konstanta harmonik pasut. Konstanta-konstanta harmonik pasut yang diperoleh dari analisis harmonik pasut saat ini telah diketahui ratusan konstanta harmonik pasut, tetapi banyak diantaranya yang mempunyai bilangan yang sangat kecil sehingga yang ditimbulkan sangat kecil pula dan umumnya dalam analisis pasut dapat diabaikan. Untuk keperluan rekayasa umumnya digunakan 9 unsur utama pembangkit pasut atau komponen utama konstanta harmonik pasut, yaitu: M2, S2, N2, K2, K1, O1, P1, M4 dan MS4. Konstanta-konstanta harmonik pasut
Tabel I.1. Konstanta harmonik pasut (Sumber: modifikasi dari Poerbandono & Djunarsjah, 2005)
Konstanta Keterangan Periode
(jam) Kategori K1 Deklinasi sistem Bulan dan Matahari 23,93
Diurnal
O1 Deklinasi Bulan 25,82
P1 Deklinasi Matahari 24,07
S2
Gravitasi Matahari dengan orbit
lingkaran dan sejajar ekuator Bumi 12,00
Semi Diurnal M2
Gravitasi Bulan dengan orbit
lingkaran dan sejajar ekuator Bumi 12,42 N2 Perubahan jarak Bulan ke Bumi
akibat lintasan elips 12,66
K2
Perubahan jarak Matahari ke Bumi
akibat lintasan elips 11,97
Mf Variasi setengah bulanan 327,86
Periode Panjang
Mm Variasi bulanan 661,30
Ssa Variasi semi tahunan 2191,43
2SM2 Interaksi bulan dan matahari 11,61
Periode dangkal MNS2
Interaksi bulan dan matahari dengna perubahan jarak matahari akibat lintasan berbentuk elips
13,13
MK3
Interaksi bulan dan matahari dengna perubahan jarak bulan akibat
lintasan berbentuk elips
8,18
M4
Dua kali kecepatan sudut M2 akibat
pengaruh Bulan di perairan Dangkal
6,21 MS4
Interaksi M2 dan S2 di perairan
dangkal 2,20
I.5.1.3. Tipe pasut. Penggolongan tipe pasang surut menggunakan 4 amplitudo konstanta harmonik yaitu M2, S2, K1 dan O1. Tipe pasang surut didasarkan
pada perbandingan antara jumlah amplitudo konstanta-konstanta harian tunggal dengan jumlah amplitudo konstanta-konstanta hariaan ganda. Perbandingan ini disebut nilai Formzahl (F) seperti persamaan I.9 (Soeprapto, 2001).
Dimana:
F : bilangan formzahl.
O1 : amplitude komponen pasang surut tunggal utama yang disebabkan oleh gaya tarik bulan.
K1 : amplitudo komponen pasang surut tunggal utama yang disebabkan oleh gaya tarik matahari.
M2 : amplitudo komponen pasang surut ganda utama yang disebabkan oleh gaya tarik bulan.
S2 : amplitudo komponen pasang surut ganda utama yang disebabkan oleh gaya tarik matahari.
Dari nilai F tersebut tipe-tipe pasang surut bias diklasifikasikan dengan menggunakan aturan “Formzahl” sebagai berikut:
: Tipe pasang surut harian ganda
: Tipe pasang surut harian campuran condong ke harian ganda : Tipe pasang surut harian campuran condong ke harian tunggal : Tipe pasang surut harian tunggal
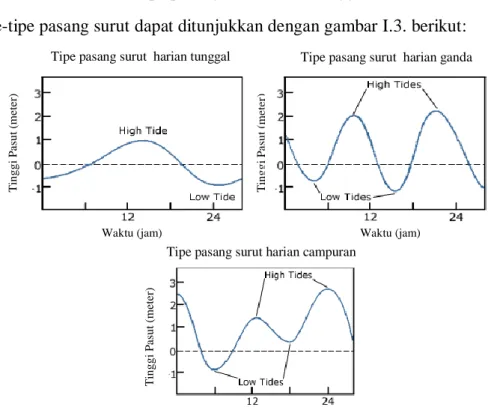
Tipe-tipe pasang surut dapat ditunjukkan dengan gambar I.3. berikut:
Gambar I.3. Tipe-tipe pasang surut (Sumber: NOAA, 2008)
Tipe pasang surut harian tunggal Tipe pasang surut harian ganda
Tipe pasang surut harian campuran
Waktu (jam) T in g g i P a su t (m e te r)
Waktu (jam) Waktu (jam)
T in g g i P a su t (m e te r) T in g g i P a su t (m e te r)
I.5.1.4. Chart Datum dan MSL. Chart Datum atau muka surutan peta adalah suatu bidang permukaan pada suatu daerah perairan yang didefinisikan terletak di bawah permukaan air laut terendah yang mungkin terjadi. Chart Datum digunakan sebagai dasar penentuan angka kedalaman pada peta batimetri (bidang nol). Kedudukan Chart Datum diinisialkan dengan di bawah Mean Sea Level (S0) dengan
jarak sebesar faktor Z0 (jarak surutan peta). Besar faktor Z0 tersebut umumnya
berbeda antar lokasi lainya. Pada pekerjaan teknis dimana daerah yang dilakukan survei belum diketahui muka surutan petanya, maka dilakukan pengukuran pasut selama 15 piantan atau 29 piantan untuk mendapatkan nilai Chart Datum.
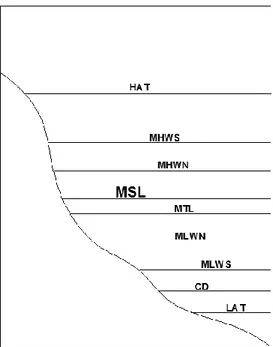
Gerakan periodik bulan dan matahari terhadap bumi menyebabkan adanya bermacam-macam kedudukan permukaan air laut. Berbagai macam kedudukan air laut tersebut dapat dilihat pada gambar 1.4.
Gambar I.4. Macam-macam kedudukan air laut (Sumber: Soeprapto, 2001) Beberapa istilah kedudukan muka air laut yang penting dikemukakan antara lain (Soeprapto, 2001).
1. Permukaan air laut rata-rata (Mean sea Level/MSL), 2. Permukaan pasang surut rerata (Mean Tidal Level/MTL),
3. Permukaan air tinggi purnama rata-rata (Mean High Water Spring/MHWS) dan permukaan air rendah purnama rata-rata (Mean Low Water Spring/MLWS),
4. Permukaan air tinggi perbani rata-rata (Mean High Water Neaps/MHWN) dan permukaan air rendah perbani rata-rata (Mean low Water Neaps /MLWN),
5. Permukaan air tinggi rata-rata (Highest High Water Spring/HHWS) dan permukaan air rendah terendah rata-rata (Lower Low Water Spring/LLWS),
6. Muka surutan peta (Chart Datum/CD), dan
7. Permukaan pasang surut tertinggi astronomi (Highest Astronomic
Tide/HAT) dan permukaan pasang surut terendah astronomi (Lowest Astronomic Tide /LAT).
Terlihat bahwa muka air rendah dapat berupa Chart Datum, Mean Low Water
Spring/MLWS, Mean Low Water Neaps /MLWN, Mean Lower Low Water/MLLW
maupun Lowest Astronomic Tide/LAT menunjukkan bahwa tergantung pada tipe pasut di perairan yang bersangkutan, seperti diurnal atau semidiurnal, maka kedudukan dan jarak relatif antara muka-muka air rendah ini juga akan bervariasi.
Berdasarkan hasil nilai amplitudo komponen harmonik tersebut ditetapkan muka surutan peta yang berada pada jarak Z0 terhadap MSL. Terdapat beberapa
model penentuan Chart Datum, secara umum nilai muka surutan peta ditentukan dengan persamaan I.10 (Soeprapto, 2001):
CD = S0 - Z0 ...(I.10)
Perbedaan terletak pada penentuan besarnya Z0, untuk masing-masing model adalah:
(Soeprapto, 2001)
1. Untuk Negara Prancis:
Z0= 1,2 (M2 + S2 + K2) ...(I.11)
2. Air rendah pada peta Admiralty Inggris:
Z0= 1,1 (M2 + S2) ...(I.12)
3. Air rendah pada peta Amerika Serikat:
4. Menurut definisi Hidrografi Internasional (IHO):
...(I.14) 5. Untuk Indian Spring Low water:
Z0= (K1 + O1 + M2 + S2) ...(I.15)
6. Menurut Dinas Hidro-oseanografi TNI-AL:
Z0 = AR kombinasi konstanta harmonik utama
(M2,S2, K2,N2, K1, O1, P1, M4 dan MS4) ... (I.16)
Banyaknya model untuk menentukan muka surutan peta antara lain karena pada tiap-tiap daerah mempunyai tipe dan karakteristik pasut yang berbeda. Pemilihan model pada umumnya adalah tergantung pada sifat pasut di daerah yang bersangkutan dan pada kepentingan yang terkait.
I.5.1.5. Pengukuran pasang surut. Pengukuran pasang surut selama ini telah dilakukan dengan berbagai macam cara, antara lain:
1. Pengukuran dengan menggunakan palem pasut merupakan teknologi tertua. Palem diletakkan di dinding-dinding dermaga atau dinding stasiun pengamat pasut. Hasil pengamatan pasut dilakukan untuk interval tertentu misalkan per-jam. Pencatatan hasil pengamatan dilakukan secara manual oleh si pengamat di atas kertas. Meskipun teknologi ini terbilang kuno, sampai saat ini penggunaan palem pasut masih terus dilakukan dengan alasan data control dan reality check di lapangan.
2. Pengukuran dengan float gauge dilakukan pada stasiun-stasiun pengamatan yang rangkaian instrumennya dihubungkan langsung pada stililing well/tabung pengamatan. Di dalam tabung tersebut terdapat benda apapun yang dikoneksikan dengan tali ke neraca beban, pen perekam dan jam. Hasil pengamatan teknologi ini ada 2 macam yakni secara manual di kertas rekaman dan secara digital.
3. Pengukuran dengan gelombang akustik dilakukan dengan memanfaatkan gelombang akustik. Gelombang akustik yang dipancarkan oleh transmitter setelah mengenai permukaan air laut akan dipantulkan kembali ke sensor. Jeda waktu pemancaran dan penerimaan inilah yang selanjutnya diolah dan digunakan untuk mendefinisikan ketinggian muka air laut. Pada pengukuran dengan
gelombang akustik ini dapat dilakukan dalam 2 macam cara yakni dengan open
air (tanpa menggunakan stilling well) dan menggunakan tabung stilling well.
4. Prinsip pengukuran menggunakan tekanan adalah mengukur tekanan hidrostatik dari kolom-kolom air untuk posisi titik tetap (fixed point) dan mengkonversi tekanan tersebut dalam wujud level/ketinggian muka laut. Terdapat berbagai macam bentuk pengukuran dengan menggunakan prinsip ini, diantaranya: Single
Transducer (sistem transducer tunggal), Multiple Pressure Transducer systems/ ‘BGauges’ (system transducer multi tekanan), Pressure Transducers in Stilling Wells (tekanan transducer dalam tabung), Bubbler Pressure GaugesdanBottom Mounted Pressure Gauges
5. Pengukuran dengan radar merupakan metode pengukuran terbaru. Teknologi ini termasuk relatif murah dengan tingkat instalasi instrument yang cukup mudah. Prinsipnya adalah mengukur jeda waktu antara pengiriman sinyal dari transmitter dengan sinyal pantulan yang diterima sensor. Ketinggian yang terukur merupakan jarak vertikal antara sensor dengan permukaan laut. Kelebihan lain yang diperoleh dengan memanfaatkan teknologi ini adalah kalibrasi otomatis, akurasi dalam centimeter serta data hasil pengamatan yang bebas dari efek temperatur. Instrument radar ditunjukkan pada gambar I.5.
Gambar I.5. Contoh instrument pengukuran pasut dengan radar (Sumber: Woodworth, 2003)
I.5.2. Survei Batimetri
Survei batimetri sering disebut dengan istilah pemeruman yaitu proses dan aktivitas yang ditujukan untuk memperoleh gambaran bentuk permukaan dasar perairan (seabed surface). Bentuk permukaan yang dimaksud hanya sebatas pada konfigurasinya saja, tidak sampai pada kandungan meterialnya atau pun biota yang
tumbuh di atasnya (Poerbandono & Djunarsjah, 2005). Pada survei batimetri salah satu ketentuan teknis yang berlaku internasional adalah ketentuan IHO (International
Hydrographic Organization). Peta batimetri harus memiliki sebuah datum vertikal,
datum vertikal adalah referensi sebagai dasar pengukuran ketinggian atau kedalaman. Pada peta batimetri umumnya menggunakan suatu bidang air rendah (Chart Datum) sebagai bidang referensi tinggi, sehingga semua kedalaman yang diperhatikan pada peta laut mengacu pada pasut rendah (low tide).
I.5.2.1. Kegiatan survei batimetri. Pada survei batimetri pengukuran kedalaman titik pemeruman (h) dilakukan secara simultan dengan pengukuran posisi horizontal titik-titik pemeruman (X,Y). Pengukuran kedalaman dilakukan dengan alat ukur kedalaman yang menggunakan gelombang akustik yaitu alat echosounder atau perum. Data yang diperoleh dari pengukuran dengan echosounder adalah selang waktu gelombang mulai dipancarkan dan gelombang kembali diterima oleh alat, sehingga diperoleh data kedalaman yang dicatat alat perekam merupakan fungsi selang waktu. Sebagaimana diuraikan dalam persamaan I.17 (Poerbandono & Djunarsjah, 2005).
... (I.17) Keterangan:
h : kedalaman laut yang terukur pada saat pengukuran, v(t) : cepat rambat gelombang suara di air,
t1 & t2 : waktu pada saat gelombang suara dipancarkan dan saat penerimaan gelombang pantulnya.
Penentuan posisi titik pemeruman dalam survei batimetri merupakan peran yang sangat penting. Beberapa metode dalam penentuan posisi horizontal (X,Y) titik-titik pemeruman dengan gelombang elektromagnetik (Satellite Receiver) yang dipasang pada kapal survei. Metode yang digunakan dapat berupa metode GPS absolut maupun metode differential GPS (Poerbandono, 2005). Pada pekerjaan ini penentuan posisi horizontal menggunakan sistem satelit yang disebut dengan DGPS (Differential Global Positioning System).
Faktor lain yang mempengaruhi pengukuran batimetri adalah dinamika media air laut berupa pasang surut laut. Pada pengukuran kedalaman dasar laut perlu
dilakukan tiga pengukuran sekaligus pada waktu yang bersamaan yaitu pengukuran kedalaman, pengukuran posisi alat ukur kedalaman (posisi horizontal) dan pengukuran pasang surut. Dari ketiga data tersebut akan menjadi informasi kedalaman pada posisi fix terhadap suatu bidang referensi.
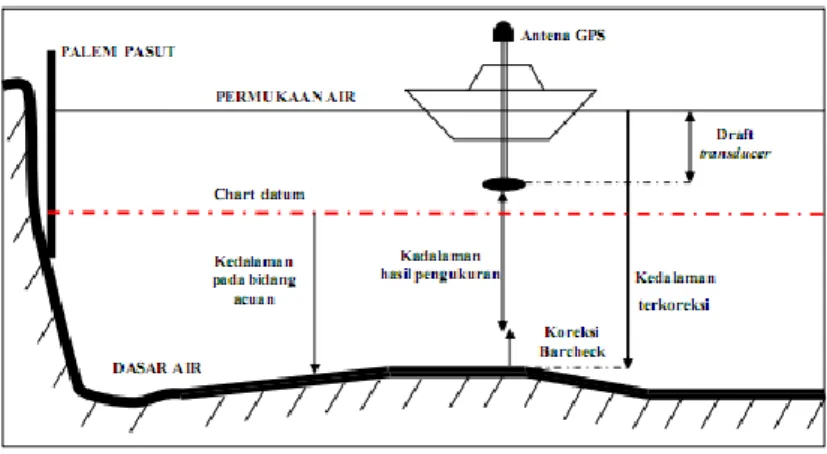
I.5.2.2. Pengolahan data batimetri. Hasil dari pengukuran batimetri adalah data kedalaman (h) dan data posisi fix horizontal (X,Y). Untuk mendapatkan data kedalaman yang terkoreksi maka perlu mempertimbangkan koreksi tinggi muka air saat dilakukan pemeruman, koreksi draft transducer dan koreksi barcheck. (Septiyadi, 2013). Kedalaman terkoreksi dapat dilihat pada gambar I.6 dan untuk perhitungan tinggi terkoreksi dengan persamaan I.18.
... (I.18)
Gambar I.6. Penentuan kedalaman yang tereduksi terhadap bidang acuan (Sumber: Pramanda, 2013)
Pada gambar I.6. dapat terlihat cara untuk memperoleh angka kedalaman yang terkoreksi ke bidang acuan tinggi (Chart Datum). Untuk membedakan dengan angka ketinggian maka angka kedalaman harus bernilai negatif. Penentuan nilai kedalaman titik-titik pemeruman dapat diketahui dengan persamaan I.19.
...(I.19) Untuk menunjukkan nilai kedalaman maka Hreduksi bernilai negatif. Hreduksi
digunakan untuk keperluan pembuatan garis kontur kedalaman, sedangkan untuk pembuatan DTM (Digital Terrain Model) digunakan nilai Z (angka ketinggian). Nilai Z ini diperoleh dengan persamaan I.20.
I.5.2.3. Uji kualitas hasil data pemeruman. Hasil survei batimetri adalah nilai kedalaman yang terukur, nilai kedalaman tersebut perlu dilakukan uji kualitas. Acuan yang digunakan untuk menentukan batas toleransi kesalahan nilai beda kedalaman yaitu IHO SP-44 tahun 2008 dengan tingkat kepercayaan 95%. Adapun persamaan I.21 yang digunakan untuk menghitung batas toleransi kesalahan nilai beda kedalaman sebagai berikut:
... (I.21) dimana:
a : kesalahan independent,
b : faktor kesalahan kedalaman yang dependent, d : kedalaman rata-rata,
(bxd) : kesalahan kedalaman yang dependent (jumlah semua kesalahan kedalaman yang dependent).
Dalam hal ini, nilai a dan b disesuaikan dengan orde survei berdasarkan tabel standar IHO untuk survei hidografi, tabel tersebut dapat dilihat pada lampiran A.
Pada uji kualitas terlebih dahulu mengasumsikan bahwa kedalaman lajur utama (Hlu) nilainya sama dengan kedalaman lajur silang (Hls) yang berada pada posisi koordinat horizontal yang sama. Kemudian dilakukan perhitungan standar deviasi dari data tersebut, proses perhitungan disajikan pada persamaan I.22 sampai persamaan I.25 (Mikhail, dkk., 1981). Hlu - Hls = H ... (I.22) ... (I.23) Mean error: ... (I.24) Standard deviation: ... (I.25) Keterangan:
Hlu : kedalaman lajur utama Hls : kedalaman lajur silang
Hi : beda nilai kedalaman lajur utama dan lajur silang : standar deviasi
: selisih kedalaman
Uji kualitas dilanjutkan dengan menghitung nilai kesalahan data beda kedalaman dengan tingkat kepercayaan 95% yang mengacu pada IHO SP-44 tahun 2008 yaitu sebesar 1,96 x σ (simpangan baku). Jika nilai kesalahan data beda kedalaman masih dalam batas toleransi kedalaman, maka kualitas sampel data kedalaman masuk dalam toleransi yang merujuk pada IHO SP-44 tahun 2008. Sedangkan jika nilai kesalahan data beda kedalaman diluar batas toleransi kedalaman, maka kualitas sampel data kedalaman tidak masuk dalam toleransi.
I.5.2.4. Peta batimetri. Peta batimetri adalah peta yang menggambarkan bentuk konfigurasi dasar laut dinyatakan dengan angka-angka kedalaman dan garis-garis kedalaman yang diukur terhadap datum vertikal (Chart Datum). Peta batimetri diperlukan untuk mengetahui keadaan kedalaman laut sekitar lokasi suatu perairan (Triatmodjo,1999).
Data informasi yang diberikan oleh peta batimetri: 1. Bentuk garis pantai (kontur),
2. Kedalamam peta, 3. Muka surutan,
4. Informasi peta (No.peta, judul peta, skala peta, koreksi peta, legenda, proyeksi peta dan satuan kedalaman laut serta informasi kelengkapan peta lainya),
5. Skala peta perbandingan satu satuan panjang di peta terhadap panjang sebenarnya.
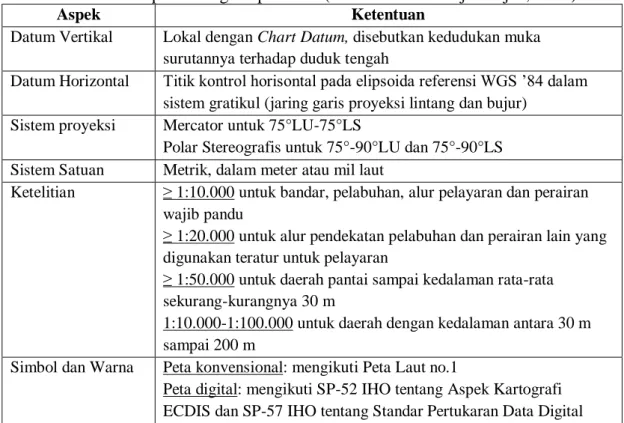
IHO telah menetapkan tujuh aspek kartografi peta laut, yaitu; datum vertikal, datum horizontal, sistem proyeksi, sistem satuan, ketelitian (skala), dan simbol serta warna. Aspek tersebut dapat dilihat pada tabel I.2.
Tabel I.2. Aspek kartografi peta laut (Poerbandono & Djunarsjah, 2005)
Aspek Ketentuan
Datum Vertikal Lokal dengan Chart Datum, disebutkan kedudukan muka surutannya terhadap duduk tengah
Datum Horizontal Titik kontrol horisontal pada elipsoida referensi WGS ’84 dalam sistem gratikul (jaring garis proyeksi lintang dan bujur)
Sistem proyeksi Mercator untuk 75°LU-75°LS
Polar Stereografis untuk 75°-90°LU dan 75°-90°LS Sistem Satuan Metrik, dalam meter atau mil laut
Ketelitian ≥ 1:10.000 untuk bandar, pelabuhan, alur pelayaran dan perairan wajib pandu
≥ 1:20.000 untuk alur pendekatan pelabuhan dan perairan lain yang digunakan teratur untuk pelayaran
≥ 1:50.000 untuk daerah pantai sampai kedalaman rata-rata sekurang-kurangnya 30 m
1:10.000-1:100.000 untuk daerah dengan kedalaman antara 30 m sampai 200 m
Simbol dan Warna Peta konvensional: mengikuti Peta Laut no.1
Peta digital: mengikuti SP-52 IHO tentang Aspek Kartografi ECDIS dan SP-57 IHO tentang Standar Pertukaran Data Digital
I.5.3. Survei Topografi
Survei topografi atau pemetaan bertujuan untuk membuat peta topografi yang berisi informasi dari keadaan permukaan bumi atau daerah yang dipetakan. Peta topografi adalah gambaran dari permukaan bumi pada bidang datar dengan skala tertentu dan dengan sistem proyeksi tertentu (Basuki, 2006). Informasi yang disajikan pada peta topografi meliputi keadaan detail baik yang bersifat alamiah maupun buatan manusia serta keadaan ketinggian daerah pengukuran. Infomasi tersebut digunakan sebagai dasar untuk melakukan perencanaan kerja yang akan dilakukan pada beberapa bidang pekerjaan (engineering). Misalnya pekerjaan perencanaan pembangunan kabel laut memerlukan peta topografi skala besar yang memungkinkan pelaksana mendapatkan gambaran kondisi lokasi secara jelas dan rinci.
Pada pekerjaan pemetaan salah satunya pekerjaan topografi memerlukan kerangka kontrol vertikal. Kerangka kontrol vertikal adalah titik ikat ketinggian suatu titik, atau bidang terhadap suatu datum (bidang referensi). Maka dari itu untuk mengetahui posisi vertikal baik itu di atas permukaan laut atau kedalaman titik
pemeruman, harus diketahui didang referensi yang digunakan. Bidang referensi yang digunakan untuk keperluaan tinggi topografi adalah permukaan air laut rata-rata (Mean Sea Level/MSL).
Metode pemetaan topografi ada dua macam yaitu metode terestris dan ekstraterestris. Pada pekerjaan ini adalah menggunakan metode terestris, adapun tahapan pekerjaan survei topografi meliputi persiapan, pengukuran titik kontrol pemetaan, pengukuran titik detil, pengolahan data dan penggambaran peta topografi. Persiapan pekerjaan meliputi pekerjaan administrasi dan persiapan teknis. Pekerjaan pengukuran titik kontrol pemetaan, pengukuran titik detil, pengolahan data dan penggambaran diuraikan pada anak sub bab berikut ini.
I.5.3.1. Titik kontrol pemetaan. Titik kontrol pemetaan terdiri dari dua macam yaitu Kerangka Kontrol Horizontal (KKH) dan Kerangka Kontrol Vertikal (KKV). Kerangka Kontrol Horizontal (KKH) merupakan jaringan yang disusun oleh rangkaian titik-titik yang diketahui koordinatnya dalam suatu sistem tertentu sebagai acuan untuk koordinasi semua survei dan pemetaan di suatu daerah. Pembentukan KKH dapat dilakukan dengan metode konvensional yaitu dengan cara triangulasi, trilaterasi dan poligon serta metode satelit atau GPS.
Titik-titik KKH digunakan sebagai titik ikatan dalam kegiatan pemetaan sehingga titik-titik yang akan dipetakan terikat pada sistem yang ada. Sistem koordinat titik-titik KKH direferensikan pada bidang elipsoid yang merupakan pendekatan bentuk fisik bumi. Kebutuhan titik ikat dalam pemetaan disesuaikan dengan kebutuhan dan ketelitian yang diinginkan. Metode pengukuran KKH antara lain adalah metode GPS.
Metode GPS (Global Positioning System) adalah sistem satelit navigasi dan penentuan posisi secara global yang dimiliki dan dikelola oleh Departemen Amerika Serikat. Sistem GPS, yang nama aslinya adalah NAVSTAR GPS (Navigation
Satellite Timing and Ranging Global Positioning System), mempunyai tiga segmen
yaitu: satelit, pengontrol, dan penerima/pengguna. Hasil penentuan posisi dengan GPS adalah posisi atau koordinat yang bereferensi kedatum global yaitu World
baik di darat maupun di laut, metode pengukuran KKH dengan survei GPS ada beberapa macam yaitu (SNI10-6742, 2002):
1. Metode statik adalah metode survei GPS dengan waktu pengamatan yang relatif lama (beberapa jam) di setiap titiknya. Titik-titik yang diukur posisinya diam (tidak bergerak).
2. Metode stop and go adalah proses pengamatan GPS dengan melakukan
inisialisasi di titik awal untuk penentuan ambiguitas fase, receiver GPS
bergerak dari titik ke titik lainnya dan melakukan pengamatan dalam waktu yang relatif singkat (sekitar 1 menit) pada setiap titiknya. Metode penentuan posisi ini kadang disebut juga sebagai metode semi-kinematik
3. Metode pseudo-kinematik adalah metode survei GPS yang pengamatannya di dilakukan dua kali secara singkat (5-10 menit) pada satu titik dengan selang waktu yang relatif cukup lama (1-2 jam) antara keduanya.
Sedangkan untuk penentuan posisi di bumi dengan GPS dibagi menjadi 2 yaitu:
1. Metode absolut dikenal juga sebagai point positioning, menentukan posisi hanya berdasarkan pada 1 pesawat penerima (receiver) saja. Ketelitian posisi dalam beberapa meter (tidak berketelitian tinggi) dan hanya diperuntukkan untuk keperluan navigasi.
2. Metode relatif atau sering disebut differential positioning, menetukan posisi dengan menggunakan lebih dari satu receiver. Metode ini menghasilkan posisi berketelitian tinggi umumnya kurang dari 1 meter dan diaplikasikan untuk keperluan survei geodesi atau pemetaan yang memerlukan ketelitian tinggi, seperti metode kinematik differensial, sistem DGPS dan RTK
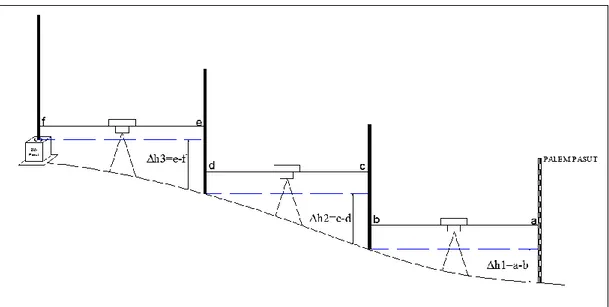
Pengukuran kerangka kontrol vertikal (KKV) adalah penentuan posisi tinggi pada titik yang diukur. Nilai ketinggian pada titik-titik kontrol pasut digunakan untuk referensi bidang pemetaan. Sistem referensi tinggi yang biasa dipergunakan pada topografi adalah tinggi permukaan air laut rata-rata (Mean Sea Level). Nilai MSL diperoleh dari pengukuran pasang surut laut. Pengukuran titik kontrol pasut ke palem pasut dilakukan dengan metode waterpass. Prinsip pengukuran dengan metode
dilakukan akan mendapatkan data beda tinggi yang kemudian akan dipakai untuk menghitung tinggi titik tersebut.
Gambar I.7. Pengukuran metode waterpass memanjang Nilai tinggi titik kontor pasut diperoleh dari persamaan I.26.
∆h= ∑∆h ...(I.26) Keterangan gambar I.7 dan persamaan I.26:
a, b, c, d, e dan f : bacaan rambu
∆h1, ∆h2, ∆h3 : beda tinggi antar rambu ukur
∆h : beda tinggi rambu pasut dan titik BM Pasut
I.5.3.2.Pengukuran detil. Pengukuran detil dapat dilakukan menggunakan alat
Total Station (TS) atau GPS. Metode pengukuran detil dengan TS dalam
pengambilan data dilakukan dengan cara trigonometris. Metode pengukuran detil dengan GPS menggunakan metode RTK Radio. Kerapatan titik detil topografi yang diukur disesuaikan dengan skala peta topografi yang dihasilkan, dan mengikuti perubahan topografi lapangan. Detil-detil yang di ukur antara lain spot height, jalan, sungai, bangunan, pohon, jaringan utilitas dll. Semua titik detil di datar yang terukurharus terikat dengan referensi yang digunakan, untuk datum tinggi yang digunakan adalah Chart Datum sedangkan datum horizontal mengacu pada datum WGS’84.
I.5.3.3.Peta topografi. Peta topografi adalah gambaran tentang permukaan bumi dengan detilnya (jalan, sungai, jembatan, rumah dll) yang disajikan dalam
bidang datar dengan skala tertentu. Pengertian lain mengenai peta topografi ada dua, yaitu peta yang menggambarkan relief permukaan bumi beserta bangunan alamiah maupun buatan manusia yang ada di atasnya. Dan peta yang menggambarkan relief/sifat permukaan bumi yang digambarkan dengan garis kontur.
Informasi yang diberikan pada peta topografi: (Anonim, 2013) 1. Kontur permukaan bumi,
2. Detil permukaan bumi,
3. Informasi peta (No.peta, judul peta, skala peta, koreksi peta, legenda, proyeksi peta dan satuan kedalaman laut serta informasi kelengkapan peta lainya),
4. Skala peta perbandingan satu satuan panjang di peta terhadap panjang sebenarnya.
Proses penggambaran peta topografi dilakukan secara digital dengan bantuan komputer. Tahapan pembuatan peta topografi yaitu plotting, editing dan finishing. Inti dari proses penggambaran mengacu pada koordinat-koordinat yang didapatkan setelah proses perhitungan selesai secara keseluruhan.
I.5.4. Prinsip Dasar Penggabungan Peta Topografi dan Peta Batimetri antara Landing Point PLTU Kariangau dan GI Petung
Pada kegiatan aplikatif ini mengenai perancanaan rute kabel laut 150 KV dari
landing point PLTU Kariangau sampai Gardu Induk Petung akan menggabungan
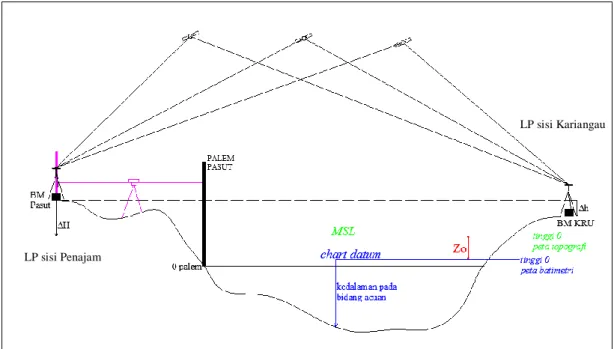
peta topografi dan peta batimetri. Dasar-dasar penggabungan peta batimetri dan peta topografi harus diperhatikan untuk menghasilkan sebuah peta yang baik. Prinsip dasar penggabungan peta batimetri dan peta topografi antara landing points PLTU Kariangau dan GI Petung dapat dilihat pada gambar I.8.
Gambar I.8. Prinsip dasar penggabungan peta topografi dan peta batimetri Keterangan gambar I.8 :
∆H : beda tinggi BM Pasut ke tinggi 0 peta topografi (MSL), ∆h : beda tinggi BM Pasut dengan BM KRU.
Gambar I.8 menggambarkan bahwa MSL adalah sebagai tinggi 0 peta topografi dan Chart Datum adalah sebagai tinggi 0 peta batimetri. Untuk keperluan kegiatan aplikatif ini maka perlu dilakukan penyatuan referensi tinggi guna penggabungan peta batimetri dan peta topografi. Referensi tinggi yang digunakan adalah referensi tinggi Chart Datum, sehingga pada detil topografi dilakukan koreksi tinggi ke bidang Chart Datum. Perbedaan tinggi antar Mean Sea Level dan Chart
Datum ditunjukkan dengan nilai Zo. LP sisi Penajam