HUBUNGAN ANTARA TRANSMISIBILITAS GAYA DAN
TRANSMISIBILITAS GETARAN PADA SISTEM DUA DERAJAT
KEBEBASAN
TUGAS SARJANA
Diajukan sebagai salah satu syarat untuk memperoleh gelar Sarjana Teknik
Oleh
Ahmad Rifqi Brillian Tobibi
131 11 129
PROGRAM STUDI TEKNIK MESIN
FAKULTAS TEKNIK MESIN DAN DIRGANTARA
INSTITUT TEKNOLOGI BANDUNG
Lembaran Pengesahan
Tugas Sarjana
Hubungan Antara Transmisibilitas Gaya dan Transmisibilitas Getaran
pada Sistem Dua Derajat Kebebasan
Oleh
Ahmad Rifqi Brillian Tobibi
131 11 129
Program Studi Teknik Mesin Fakultas Teknik Mesin dan Dirgantara
Institut Teknologi Bandung
Disetujui pada Tanggal: 15 Februari 2016
Pembimbing Utama
Tugas Sarjana
Judul
Hubungan Antara Transmisibilitas Gaya dan Transmisibilitas Getaran pada Sistem Dua Derajat
Kebebasan
Ahmad Rifqi Brillian Tobibi
Program Studi Teknik Mesin 131 11 129
Fakultas Teknik Mesin dan Dirgantara Institut Teknologi Bandung
Abstrak
Proses di dalam dunia industri tidak pernah lepas dari penggunaan rotating machinery. Peralatan tersebut sering menimbulkan getaran saat beroperasi. Getaran ini dapat disebabkan oleh adanya gaya dinamik. Gaya dinamik yang dihasilkan juga ditransmisikan ke lingkungan sekitarnya. Gaya yang ditransmisikan ini dalam kenyataannya tidak dapat diukur secara langsung dengan menggunakan sensor gaya, namun transmisibilitas getaran dapat diukur secara langsung. Oleh karena itu, penelitian ini bertujuan untuk mencari hubungan antara transmisibilitas gaya dan transmisibilitas getaran.
Penelitian ini dimulai dari penurunan beberapa persamaan yaitu persamaan transmisibilitas getaran, persamaan transmisibilitas gaya, dan persamaan hubungan antara transmisibilitas gaya dan transmisibilitas getaran. Selain itu, dalam penelitian ini juga dilakukan pengujian logarithmic decrement dan pengujian transmisibilitas pada isolator. Berdasarkan pengujian logarithmic decrement diperoleh parameter dinamik isolator untuk dibuat pemodelan, sedangkan dari pengujian transmisibilitas pada isolator didapatkan grafik transmisibilitas getaran dan transmisibilitas gaya. Grafik hasil pengujian transmisibilitas pada isolator kemudian dibandingkan dengan grafik hasil pemodelan dan perbedaan yang terjadi diantara keduanya dianalisis. Selain itu, perbandingan juga dilakukan antara pengukuran transmisibilitas gaya secara langsung dan secara tidak langsung. Perbandingan ini kemudian dianalisis.
Dalam penelitian ini dapat diperoleh hubungan antara transmisibilitas gaya dan transmisibilitas getaran. Dalam penelitian juga terungkap bahwa transmisibilitas gaya dapat dihitung jika nilai transmisibilitas getaran telah diukur dan massa getar diketahui.
Final Project
Title Force Transmissibility and Vibration Transmissibility Relation in Two Degrees of Freedom System
Ahmad Rifqi Brillian Tobibi
Major Mechanical Engineering 131 11 129
Faculty of Mechanical and Aerospace Engineering Institut Teknologi Bandung
Abstract
The use of rotating machineries will never be avoided in industrial process. Those equipments often cause vibrations during operation. These vibrations are caused by dynamic force. The dynamic force affects not only to machine, but also to the environments located arround. The transmitted forces cannot be usually measured directly using the forces sensor, but vibrations tranmsmissibility can be measured directly.
This research is aimed to find the relationship between force and vibration transmissibility. This research, begins with derivation of vibration and force transmissibility, and then relate these equations. After of derivation, the next step is to do identification of dynamics parameters involves in the equations. The results of identification process are used to construct mathematical model. The next step is transmissibility test which results vibration and force transmissibility graphs. These graphs are then compared to graphs obtained from modelling process and the differences between them are analyzed. A comparison is also done to the force transmissibility obtained directly and indirectly.
Based on the results, it can be concluded that the relationship between force and vibration transmissibility is obtained. In addition, force transmissibility curve can be obtained if vibration transmissibility curve have been obtained and vibration masses are known.
i
KATA PENGANTAR
Puji syukur penulis panjatkan kepada Allah SWT karena atas rahmat dan karunia-Nya, penulis dapat menyelesaikan laporan tugas sarjana ini. Tugas sarjana ini adalah salah satu syarat untuk mendapatkan gelar Sarjana Teknik dari Program Studi Teknik Mesin Institut Teknologi Bandung.
Penulis mendapatkan banyak bantuan dari berbagai pihak selama peneyelesaian tugas sarjana ini. Oleh karena itu, pada kesempatan kali ini penulis ingin mengucapkan terima kasih kepada :
1. Prof. Dr. Ir. Zainal Abidin selaku dosen pembimbing yang telah sabar membimbing dan memberikan banyak ilmu, nasihat, saran, kritik demi kebaikan penulis ke depannya. 2. Mas Budi Heryadi dan Mas Tobias Prawira Tumbuan yang sangat membantu penulis
melalui saran, masukan, dan bimbingan.
3. Teman-teman di Laboratorium Dinamika : Mas Made Yoga, Mas Rauf, Mas Alan, Benny, Arif, Saniy, Vathiya, Chandra, Kevin, Meitha, dan Aini yang telah membantu penulis untuk menyelesaikan tugas sarjana ini.
4. Para staf di Laboratorium Dinamika : Pak Lutfi, Pak Sugeng, Teh Yani, dan Mas Imam atas segala bantuannya.
5. Ayah dan Ibu serta kedua adik saya : Luluk dan Arum yang senantiasa memberikan doa, semangat, dan dukungan kepada penulis sehingga penulis lebih termotivasi untuk menyelesaikan tugas sarjana ini.
6. Teman-teman Ojo Dumeh : Yusuf, Arif, Madun, Heri, Kamal, dan Faiz yang selalu memberikan inspirasi dan bantuan kepada penulis.
Penulis menyadari bahwa laporan tugas sarjana ini jauh dari kata sempurna. Penulis mengharapkan adanya saran dan kritik yang membangun. Semoga tugas sarjana ini bisa bermanfaat. Terima kasih.
Bandung, Januari 2016
ii
1.6 Sistematika Penulisan ... 5
Bab 2 Teori Dasar ... 6
2.1 Sistem Isolasi Getaran ... 6
2.2 Sistem Isolasi Getaran Satu Derajat Kebebasan ... 6
2.3 Gaya Transmisi pada Sistem Dua Derajat Kebebasan ... 9
2.3.1 Penurunan Persamaan X2/X1 ... 10
2.3.2 Penurunan Persamaan FT1/F1 ... 11
2.3.3 Penurunan Persamaan FT2/F1 ... 12
2.4 Gaya Transmisi pada Sistem Dua Derajat Kebebasan Akibat Eksitasi pada Massa 212 2.4.1 Penurunan Persamaan X1/X2 ... 13
2.4.2 Penurunan Persamaan FT1/F2 ... 14
2.4.3 Penurunan Persamaan FT2/F2 ... 15
2.5 Persamaan Hubungan Transmisibilitas Gaya dengan Transmisibilitas Getaran ... 16
2.6 Metode Logarithmic Decrement ... 19
Bab 3 Pengujian Identifikasi Parameter Dinamik dan Pemodelan Sistem ... 21
3.1 Obyek Uji ... 21
3.2 Pengujian Paramater Dinamik ... 22
3.2.1 Perangkat Pengujian ... 22
3.2.2 Prosedur Pengujian ... 23
3.2.3 Hasil Pengujian dan Analisis ... 24
3.3 Pemodelan Sistem ... 26
iii
3.3.2 Pemodelan Transmisibilitas Gaya ... 26
Bab 4 Pengujian Transmisibilitas Gaya dan Getaran ... 30
4.1 Pengujian Frekuensi Pribadi Tiang Penyangga ... 30
4.2 Pengukuran Transmisibilitas pada Isolator 1 ... 30
4.2.1 Perangkat Pengujian Transmisibilitas pada Isolator 1 ... 30
4.2.2 Prosedur Pengujian Transmisibilitas pada Isolator 1 ... 31
4.2.3 Hasil Pengujian dan Analisis Transmisibilitas pada Isolator 1 saat Dieksitasi pada Massa 1 ... 32
4.2.4 Perbandingan Hasil Pemodelan dan Pengujian saat Eksitasi diberikan pada Massa 1 ... 36
4.2.5 Perbandingan Antara Nilai Transmisibilitas Gaya yang Diukur Secara Langsung dan Tidak Langsung saat Eksitasi Diberikan pada Massa 1 ... 37
4.2.6 Hasil Pengujian dan Analisis Transmisibilitas pada Isolator 1 saat Eksitasi Diberikan pada Massa 2 ... 37
4.2.7 Perbandingan Hasil Pemodelan dan Pengujian saat Eksitasi Diberikan pada Massa 2 ... 40
4.2.8 Perbandingan Antara Nilai Transmisibilitas Gaya yang Diukur Secara Langsung dan Tidak Langsung saat Eksitasi Diberikan pada Massa 2 ... 42
4.3 Pengukuran Transmisibilitas pada Isolator 2 ... 43
4.3.1 Perangkat Pengujian Transmisibilitas pada Isolator 2 ... 44
4.3.2 Prosedur Pengujian Transmisibilitas pada Isolator 2 ... 44
4.3.3 Hasil Pengujian dan Analisis Transmisibilitas pada Isolator 2 saat Eksitasi Diberikan pada Massa 1 ... 45
4.3.4 Perbandingan Hasil Pemodelan dan Pengujian saat Eksitasi Diberikan pada Massa 1 ... 47
4.3.5 Perbandingan Antara Nilai Transmisibilitas Gaya yang Diukur Secara Langsung dan Tidak Langsung saat Eksitasi Diberikan pada Massa 1 ... 49
4.3.6 Hasil Pengujian dan Analisis Transmisibilitas pada Isolator 2 saat Eksitasi Diberikan pada Massa 2 ... 50
4.3.7 Perbandingan Hasil Pemodelan dan Pengujian saat Eksitasi Diberikan pada Massa 2 ... 53
4.3.8 Perbandingan Antara Nilai Transmisibilitas Gaya yang Diukur Secara Langsung dan Tidak Langsung saat Eksitasi Diberikan pada Massa 2 ... 55
iv
5.1 Kesimpulan ... 56 5.2 Saran ... 56 DAFTAR PUSTAKA ... 57
LAMPIRAN A FOTO PENGUJIAN LAMPIRAN B PROGRAM MATLAB
v
DAFTAR GAMBAR
Gambar 1.1 Diagram alir penelitian ... 4
Gambar 2.1 Jenis-jenis sistem isolasi getaran [5] ... 6
Gambar 2.2 Sistem isolasi gaya dinamik sistem ... 7
Gambar 2.3 Sistem yang dieksitasi akibat pergerakan pondasi ... 8
Gambar 2.4 Grafik transmisibilitas [7] ... 9
Gambar 2.5 Sistem isolasi dua derajat kebebasan ... 9
Gambar 2.6 Diagram benda bebas sistem ... 10
Gambar 2.7 Sistem dua derajat kebebasan dieksitasi pada Massa 2 ... 13
Gambar 2.8 Diagram benda bebas dengan eksitasi pada Massa 2 ... 13
Gambar 2.9 Sistem dua derajat kebebasan dengan respon percepatan ... 16
Gambar 2.10 Diagram benda bebas sistem yang dieksitasi pada Massa 1 ... 17
Gambar 2.11 Sistem dengan respon percepatan saat diberi eksitasi di Massa 2 ... 18
Gambar 2.12 Diagram benda bebas sistem saat dieksitasi pada Massa 2 ... 18
Gambar 2.13 Grafik hasil pengukuran dengan metode logaritmic decreement [9] ... 20
Gambar 3.1 Obyek uji ... 21
Gambar 3.2 Perangkat pengujian konstanta kekakuan dan redaman isolator ... 23
Gambar 3.3 Grafik hasil pengukuranIsolator 1 ... 24
Gambar 3.4 Grafik hasil pengukuranIsolator 2 ... 25
Gambar 3.5 Transmisibilitas getaran X2/X1, dengan eksitasi pada Massa 1 ... 27
Gambar 3.6 Transmisibilitas getaran X1/X2 , dengan eksitasi pada Massa 2 ... 27
Gambar 3.7 Transmisibilitas gaya FT1/F1 , dengan eksitasi pada Massa 1 ... 28
Gambar 3.8 Transmisibilitas gaya FT2/F1, dengan eksitasi pada Massa 1 ... 28
Gambar 3.9 Transmisibilitas gaya FT1/F2 , dengan eksitasi pada Massa 2 ... 29
Gambar 3.10 Transmisibilitas gaya FT2/F2, dengan eksitasi pada Massa 2... 29
Gambar 4.1 Perangkat pengujian transmisibilitas Isolator 1 ... 31
Gambar 4.2 Hasil pengukuran FRF A1/F1 pengujian Isolator 1 ... 33
Gambar 4.3 Hasil pengukuran FRF A2/F1 pengujian Isolator 1 ... 34
Gambar 4.4 Transmisibilitas getaran A2/A1 hasil pembagian A2/F1 dan A1/F1 ... 35
Gambar 4.5 Hasil pengujian FT1/F1 ... 35
vi
Gambar 4.7 Perbandingan transmisibilitas gaya FT1/F1 hasil pemodelan dan pengujian Isolator 1
... 37
Gambar 4.8 Perbandingan FRF FT1/F1 pengukuran langsung dan tidak langsung ... 38
Gambar 4.9 Hasil pengukuran FRF A1/F2 pengujian Isolator 1 ... 38
Gambar 4.10 Hasil pengukuran FRF A2/F2 pengujian Isolator 1 ... 39
Gambar 4.11 Transmisibilitas getaran A1/A2 hasil pembagian A1/F2 dan A2/F2 ... 40
Gambar 4.12 Grafik pengukuran FRF FT1/F2 ... 41
Gambar 4.13 Perbandingan transmisibilitas A1/A2 hasil pemodelan dan pengujian Isolator 1 .... 41
Gambar 4.14 Perbandingan transmisibilitas gaya FT1/F2 hasil pemodelan dan pengujian Isolator 1 ... 42
Gambar 4.15 Perbandingan FRF FT1/F2 pengukuran langsung dan tidak langsung ... 43
Gambar 4.16 Perangkat pengujian transmisibilitas Isolator 2 ... 45
Gambar 4.17 Hasil pengukuran FRF A1/F1 pengujian Isolator 2 ... 46
Gambar 4.18 Hasil pengukuran FRF A2/F1 pengujian Isolator 2 ... 47
Gambar 4.19 Transmisibilitas getaran A2/A1 hasil pembagian A2/F1 dan A1/F1 ... 47
Gambar 4.20 Hasil pengukuran FRF FT2/F1 ... 48
Gambar 4.21 Perbandingan transmisibilitas A2/A1 hasil pemodelan dan hasil pengujian Isolator 2 ... 49
Gambar 4.22 Perbandingan transmisibilitas gaya FT2/F1 hasil pemodelan dan hasil pengujian ... 49
Gambar 4.23 Grafik perbandingan FRF FT2/F1 ... 50
Gambar 4.24 Hasil pengukuran FRF A1/F2 pengujian Isolator 2 ... 51
Gambar 4.25 Hasil pengukuran FRF A2/F2 pengujian Isolator 2 ... 52
Gambar 4.26 Transmisibilitas getaran A1/A2 hasil pembagian A1/F2 dan A2/F2 ... 52
Gambar 4.27 Grafik FRF FT2/F2 ... 53
Gambar 4.28 Grafik perbandingan transmisibilitas getaran A1/A2 pengujian Isolator 2 ... 54
Gambar 4.29 Grafik perbandingan transmisibilitas gaya FT2/F2 ... 54
1
Bab 1
Pendahuluan
1.1 Latar Belakang
Proses di dalam dunia industri tidak pernah terlepas dari penggunaan peralatan permesinan terutama rotating machine seperti motor, turbin, generator, kompresor, blower, dsb. Setiap peralatan tersebut sering menimbulkan getaran saat beroperasi. Getaran ini dapat disebabkan oleh adanya massa tak seimbang, ketidaksumbuan poros, atau bahkan keduanya. Getaran yang terjadi tidak mungkin bisa dihilangkan sama sekali. Akan tetapi, besar getaran tersebut dapat dikurangi dengan berbagai cara tergantung pada sumber getaran penyebabnya.
Peralatan permesinan yang ada di industri biasanya memiliki dimensi dan massa yang cukup besar. Oleh karena itu, peralatan tersebut biasanya diletakkan di atas permukaan pondasi khusus. Pondasi ini biasanya tidak berinteraksi langsung dengan mesin yang sedang beroperasi, akan tetapi dipisahkan oleh isolator yang diletakkan diantara keduanya. Isolator ini kemudian menerima gaya dinamik pada saat mesin beroperasi. Gaya dinamik ini tidak hanya diterima oleh isolator, namun dapat ditransmisikan ke pondasi yang ada di bawahnya dan kemudian dari pondasi ditransmisikan ke lingkungan sekitarnya
2
yang sudah ada. Akan tetapi, pengukuran transmisibilitas gaya menggunakan load cell relatif lebih sulit karena sensor harus diletakkan di tempat dimana gaya dinamik ditransmisikan misalkan di bawah tumpuan mesin sehingga harus memindahkan mesin yang berukuran besar dan berat. Penelitian ini ditujukan untuk mengatasi kesulitan tersebut dengan cara mencari hubungan antara transmisibilitas getaran dan transmisibilitas gaya yang terjadi.
1.2 Kajian Pustaka
Penelitian tentang hubungan antara transmisibilitas gaya dengan transmisibilitas belum pernah dilakukan di Laboratorium Dinamika sampai saat ini. Akan tetapi, di tempat yang lain telah dilakukan beberapa penelitian yang berkaitan dengan topik tersebut. Salah satu contohnya adalah penelitian yang telah dilakukan Agus [1]. Agus melakukan analisis transmisibilitas getaran yang terjadi pada motor bakar. Peneliti ini melakukan variasi terhadap kekakuan pegas yang digunakan sebagai isolator getaran. Kemudian dari variasi kekakuan pegas yang telah digunakan, Agus menyimpulkan bahwa nilai kekakuan pegas yang paling ideal pada sistem yang digunakan adalah 75,6 kN/m.
Selain Agus, Yoon [2] juga melakukan penelitian tentang pengukuran gaya transmisi secara tidak langsung. Yoon menyatakan bahwa di dalam dunia nyata pengukuran gaya transmisi secara langsung tidak dapat dilakukan pada sembarang kondisi karena posisi antar muka dalam pengukuran mungkin berubah. Yoon menggunakan dudukan hidrolik tak linear yang diberi eksitasi sinyal sinusoidal sebagai alat ujinya. Selain itu, di dalam penelitiannya Yoon juga membahas beberapa metode pengukuran gaya transmisi secara tidak langsung untuk memperkirakan gaya dinamik. Berdasarkan hasil penelitian yang dilakukan oleh Yoon dapat disimpulkan bahwa metode tersebut dapat digunakan untuk memperkirakan besarnya gaya yang ditransmisikan oleh dudukan hidrolik akibat eksitasi sinusoidal. Berdasarkan hasil penelitian yang dilakukan Yoon, juga dapat diukur tekanan di permukaan dan gaya, dimana besar dari keduanya berhubungan.
3
diketahui besar transmisibilitas getaran dan sebaliknya. Kesimpulan yang kedua, keakuratan hasil perhitungan dari transmisibilitas dengan derajat kebebasan banyak tergantung pada jumlah koordinat yang terlibat. Kesimpulan ketiga adalah pada kasus sistem dengan derajat kebebasan banyak dapat didekati dengan sistem satu derajat kebebasan.
Selain itu, Rustighi [4] juga melakukan penelitian yang serupa dengan peneliti sebelumnya. Rustighi melakukan penelitian tentang transmisibilitas gaya pada struktur akibat pergerakan sistem. Penelitian tersebut membahas metode komputasional umum untuk sistem mekanik lebih dari satu tumpuan yang kompleks atau statik tak tentu. Pada penelitian ini Rustighi menggunakan metode numerik dan model matematika. Berdasarkan hasil penelitian ini dapat disimpulkan bahwa metode yang digunakan tersebut cukup sederhana untuk diaplikasikan dengan menggunakan perangkat lunak yang sudah umum. Berdasarkan metode ini juga dapat dilakukan perhitungan gaya transmisi ke pondasi dengan kondisi kerja yang berbeda secara cepat. Selain itu, keuntungan lainnya adalah dengan model matematika yang telah dikembangkan dapat digunakan untuk mengatur gaya transmisi berdasarkan teori state-spaced feedback.
1.3 Tujuan Penelitian
Tujuan diadakannya penilitian ini adalah menentukan hubungan antara transmisibilitas gaya yang dihasilkan dengan besar transmisibilitas getaran yang terjadi pada benda dengan dua derajat kebebasan.
1.4 Batasan Masalah
Pengujian dalam penelitian ini dilakukan dengan batasan sebagai berikut
Sistem yang dianalisis adalah sistem dengan dua derajat kebebasan dengan gerak translasi. Digunakan dua buah massa uji yang berbeda. Massa uji pertama 0,8 kg dan massa uji kedua
6,8 kg.
Digunakan dua buah isolator dengan dimensi yang berbeda, namun dengan material yang sama.
Alat ukur getaran yang digunakan adalah dua buah akselerometer. Alat ukur gaya yang digunakan adalah dua buah load cell piezoelektrik. Alat akuisisi data yang digunakan adalah iOtech.
4
1.5 Metode Penelitian
Pada penelitian ini ingin diperoleh hubungan antara transmisibilitas gaya yang dihasilkan dan transmisibilitas getaran yang terjadi. Transmisibilitas gaya tersebut ingin diukur tanpa melakukan pengukuran secara langsung, namun berdasarkan pengukuran transmisibilitas getaran. Untuk membuktikan hal tersebut dilakukan pengukuran getaran dan pengukuran gaya secara langsung. Hasil pengukuran getaran ini kemudian diolah dengan menggunakan persamaan yang telah didapatkan untuk menghitung gaya transmisi yang terjadi. Besar transmisibilitas gaya berdasarkan persamaan tersebut kemudian dibandingkan dengan transmisibilitas gaya berdasarkan pengukuran langsung.
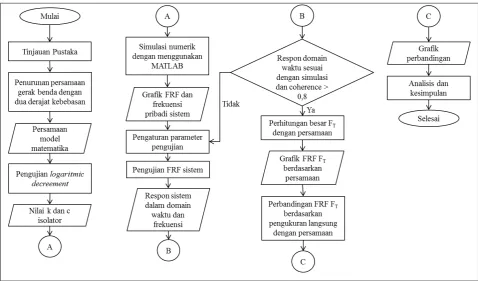
Diagram alir penelitian ini diperlihatkan dalam Gambar 1.1. Dalam gambar ini dapat dilihat bahwa penelitian ini dimulai dengan studi literatur mengenai isolasi getaran dan transmisibilitas gaya. Langkah selanjutnya dilakukan penurunan persamaan untuk mengetahui hubungan antara transmisibilitas gaya dengan transmisibilitas getaran. Kemudian dilakukan pengujian logaritmic decreement untuk menentukan nilai konstanta kekakuan dan peredaman dari isolator yang digunakan. Setelah itu dilakukan simulasi numerik menggunkan Matlab berdasarkan nilai k dan c yang telah diketahui dari pengujian logarithmic decrement. Berdasarkan simulasi ini didapatkan grafik FRF dan frekuensi pribadi dari sistem.
5
Langkah selanjutnya adalah penentuan parameter pengujian. Kemudian dilakukan pengujian FRF. Berdasarkan pengujian ini didapatkan respon sistem dalam domain waktu dan frekuensi. Respon sistem ini kemudian diperiksa domain waktu dan nilai koherensinya. Jika domain waktu telah sesuai dengan simulasi numerik dan nilai koherensi lebih dari 0,8 proses dapat dilanjutkan ke langkah berikutnya. Akan tetapi, jika kedua hal tersebut tidak dipenuhi maka harus dilakukan pengaturan parameter pengujian kembali.
Selanjutnya dilakukan perhitungan transmisibilitas gaya dinamik berdasarkan persamaan yang telah diturunkan sebelumnya. Hasil dari perhitungan ini kemudian dibandingkan dengan hasil pengukuran secara langsung. Perbandingan ini kemudian dianalisis untuk menentukan hubungan antara transmisibilitas getaran dengan transmisibilitas gaya. Setelah semua proses dilakukan, langkah terakhir adalah penarikan kesimpulan berdasarkan penelitian yang telah dilakukan.
1.6 Sistematika Penulisan
Penulisan laporan tugas sarjana ini dibagi menjadi lima bab. Dimulai dari Bab 1 yang terdiri atas enam subbab yaitu latar belakang dilakukannya penelitian ini, kajian pusataka, tujuan penelitian, batasan masalah, metode penelitian, dan sistematika penulisan.
Dilanjutkan Bab 2 yang terdiri atas lima subbab yaitu konsep isolasi getaran, sistem isolasi getaran satu derajat kebebasan, gaya transmisi pada sistem dua derajat kebebasan, persamaan hubungan transmisibilitas gaya dan transmisibilitas getaran, dan metode logarithmic decrement. Pada Bab 3 terdapat tiga pokok pembahasan yaitu tentang obyek uji, pengujian parameter dinamik, dan pemodelan sistem. Pemodelan sistem yang telag didapatkan kemudian dibandingkan dengan hasil pengujian yang akan dibahas secara mendalam pada Bab 4. Pada Bab 4 terdapat dua subbab yang akan membahas tentang pengukuran transmisibilitas pada Isolator 1 dan pengukuran transmisibilitas pada Isolator 2.
6
Bab 2
Teori Dasar
2.1 Sistem Isolasi Getaran
Sistem isolasi getaran adalah sistem yang berfungsi untuk mengurangi getaran yang berasal dari sumber penyebab getaran. Terdapat berbagai macam bentuk isolasi getaran seperti yang tampak pada Gambar 2.1. Dalam gambar ini ditunjukkan empat macam sistem isolasi getaran. Sistem isolasi getaran yang pertama diilustrasikan pada Gambar 2.1 (a). Pada gambar ini tampak sebuah mesin yang bergetar dibaut secara langsung ke pondasi yang berada di bawahnya sehingga gaya dinamik yang ditransmisikan ke lantai hampir sama dengan gaya eksitasi yang terjadi di dalam mesin. Gaya dinamik yang terlalu besar yang diterima lantai tidak diinginkan sehingga pegas isolator perlu dipasang pada sistem isolasi getaran, sebagaimana diperlihatkan pada Gambar 2.1 (b). Sistem ini masih dapat dikembangkan lebih lanjut agar gaya transmisi lebih kecil dengan cara menambahkan balok inersia pada bagian bawah mesin sebagaimana diperlihatkan dalam Gambar 2.1 (c). Terakhir, sistem isolasi getaran yang menghasilkan gaya transmisi terkecil adalah sistem isolasi getaran dengan massa seismik seperti yang ditunjukkan dalam Gambar 2.1 (d). Pada sistem ini, massa seismik dipasang di antara pegas atas dan pegas bawah.
Gambar 2.1 Jenis-jenis sistem isolasi getaran [5]
2.2 Sistem Isolasi Getaran Satu Derajat Kebebasan
7
pondasi. Pada Gambar 2.2 diperlihatkan model sistem isolasi untuk kasus di mana sistem digunakan untuk mengisolasi transmisi gaya dinamik dari mesin menuju pondasi.
Gambar 2.2 Sistem isolasi gaya dinamik sistem
Gaya eksitasi ini dapat ditransmisikan ke lingkungan sekitarnya melalui lantai yang amplitudonya dimisalkan FT. Besar FT kemudian dibandingkan dengan amplitudo gaya eksitasi
yang terjadi pada sistem yaitu F0. Perbandingan antara amplitudo gaya dinamik yang
ditransmisikan dan amplitudo gaya yang berasal dari mesin disebut Transmissibility Ratio (TR) yang besarnya dapat diketahui melalui persamaan
| | √ n
= frekuensi eksitasi (rad/s), dan
n = frekuensi pribadi (rad/s).
8
Gambar 2.3 Sistem yang dieksitasi akibat pergerakan pondasi
Thomson [6] telah menurunkan persamaan yang menyatakan rasio amplitudo getaran mesin terhadap amplitudo getaran pondasi. Persamaan ini merupakan fungsi dari frekuensi sebagaimana dinyatakan sebagai berikut
| | √ k m k c c ( 2.2 )
di mana : X = amplitudo getaran mesin (m), Y = amplitudo getaran pondasi (m),
k = konstanta kekakuan pegas penumpu (N/m), c = konstanta redaman (Ns/m),
m = massa mesin (kg), dan = frekuensi eksitasi (rad/s).
Berdasarkan Persamaan (2.2) dapat dibuat grafik sebagaimana tampak pada Gambar 2.4. Dalam Gambar 2.4 dapat dilihat bahwa |X/Y| untuk sembarang nilai ζ selalu bernilai 1 pada saat / n = √ . Berdasarkan gambar tersebut saat r > √ untuk sembarang nilai ζ selalu menghasilkan nilai |X/Y| kurang dari 1.
Berdasarkan Persamaan (2.2) dan Persamaan (2.1), dapat disimpulkan bahwa
9
Gambar 2.4 Grafik transmisibilitas [7]
2.3 Gaya Transmisi pada Sistem Dua Derajat Kebebasan
Sistem getaran dengan dua derajat kebebasan diilustrasikan pada Gambar 2.5. Dalam gambar ini tampak bahwa gaya f1(t) adalah gaya dinamik yang bekerja pada m1. Gaya ini timbul akibat
operasi mesin atau akibat gaya luar yang diberikan kepada sistem. Akibat adanya gaya ini maka akan timbul gaya sebesar fT1(t) yang ditransmisikan dari m1 ke m2 dan akan timbul gaya sebesar
fT2(t)yang ditransmisikan dari m2 ke lantai.
10
2.3.1 Penurunan Persamaan X2/X1
Analisis gaya yang terjadi pada m1 dan m2 dapat dipermudah dengan membuat diagram benda
bebas untuk kedua buah massa seperti yang ditunjukkan pada Gambar 2.6. Kemudian berdasarkan Gambar 2.6 dapat dibuat persamaan gerak benda dari diagram benda bebas yang ditunjukkan di bawah ini
m c ( - ) k ( - ) f , dan ( 2.4 )
( - ) - . ( 2.5 )
Gambar 2.6 Diagram benda bebas sistem
Kemudian kedua persamaan di atas diubah ke bentuk fungsi transfer
m s c s k s - c s k s s , dan ( 2.6 )
[m s c c s k k ] s - c s k s . ( 2.7 )
Persamaan di atas merupakan persamaan untuk getaran dua derajat kebebasan sehingga dapat dinyatakan dalam bentuk matriks di bawah ini
[m s c s k - c s k
- c s k m s c c s k k ] {
s
s } s dan ( 2.8 )
{ s s } [m s c c cs ks k k m cs cs ks k ] s ( 2.9 )
D adalah determinan matriks yang besarnya
m s c s k c s k ( 2.10 )
Berdasarkan operasi perkalian biasa pada matriks tersebut, didapatkan persamaan untuk X1 dan
X2 di bawah ini
11
s c s k s ( 2.12 )
Oleh karena itu, berdasarkan Persamaan (2.11) dan (2.12) yang telah didapatkan dapat diturunkan perbandingan X2 dan X1 sebagai berikut
s s
c s k
m s c c s k k ( 2.13 )
Substitusi s j ke dalam Persamaan (2.13) akan menghasilkan hubungan sebagai berikut
j
k1 = konstanta kekakuan Isolator 1 (N/m),
k2 = konstanta kekakuan Isolator 2 (N/m),
c1 = konstanta redaman Isolator 1 (Ns/m), dan
c2 = konstanta redaman Isolator 2 (Ns/m). 2.3.2 Penurunan Persamaan FT1/F1
Besar gaya transmisi yang diteruskan dari Massa 1 ke Massa 2 yaitu fT1(t) dapat diturunkan
berdasarkan diagram benda bebas sebagaimana tampak pada Gambar 2.6. Berdasarkan gambar ini dapat diturunkan persamaan keseimbangan berikut ini
f k c - k - c . ( 2.16 )
Persamaan (2.16) kemudian diubah ke dalam bentuk fungsi transfer sehingga didapatkan
s k c s s c s k s ( 2.17 ) Susbstitusi pada Persamaan (2.11) dan (2.12) ke dalam Persamaan (2.17) akan menghasilkan hubungan sebagai berikut
12 s
s
m c s m k c c s c k c k s k k
( 2.18 ) Selanjutnya substitusi s j ke dalam persamaan di atas, sehingga didapatkan persamaan
j
fT2(t) ke pondasi. Besar fT2(t) dapat diperoleh berdasarkan diagram benda bebas pada Gambar 2.6
yaitu
f c k . ( 2.20 )
Persamaan (2.20) kemudian diubah ke dalam bentuk fungsi transfer sehingga diperoleh persamaan
s c s s k s
s c s k s . ( 2.21 )
yang telah didapatkan sebagai Persamaan (2.12) kemudian disubstitusikan ke dalam Persamaan (2.21)
s c s k c s k s
Substitusi s j ke dalam persamaan tersebut akan menghasilkan j
j
[c c j c k c k j k k ]
| | √ k k c c c k c k
| | ( 2.22 )
dimana FT2 adalah amplitudo gaya dinamik yang ditransmisikan dari Massa 2 ke pondasi. 2.4 Gaya Transmisi pada Sistem Dua Derajat Kebebasan Akibat Eksitasi pada Massa 2
13
bergetar, selain itu gaya ini juga menyebabkan adanya gaya yang ditransmisikan dari Massa 2 ke Massa 1 yaitu fT1(t) dan gaya yang ditransmisikan dari Massa 2 ke pondasi yaitu fT2(t).
Gambar 2.7 Sistem dua derajat kebebasan dieksitasi pada Massa 2
2.4.1 Penurunan Persamaan X1/X2
Analisis gaya pada m1 dan m2 dapat dipermudah dengan diagram benda bebas yang ditunjukkan
pada Gambar 2.8. Kemudian berdasarkan Gambar 2.8 dapat dibuat persamaan gerak benda dari diagram benda bebas yang ditunjukkan di bawah ini
m c ( - ) k ( - ) , dan ( 2.23 )
m c k -c ( - )-k - f . ( 2.24 )
14
m s s - c s k s , dan ( 2.25 )
- c s k s m s c c s k k s s . ( 2.26 ) Persamaan di atas merupakan persamaan untuk getaran dua derajat kebebasan sehingga dapat dinyatakan dalam bentuk matriks di bawah ini
[m s c s k - D adalah determinan matriks yang besarnya
m s c s k m s c c s k k c s k ( 2.29 )
Berdasarkan operasi perkalian biasa pada matriks tersebut, didapatkan persamaan untuk X1 dan
X2 di bawah ini
s c s k s ( 2.30 )
s m s c s k s ( 2.31 )
Oleh karena itu, berdasarkan Persamaan (2.30) dan (2.31) yang telah didapatkan dapat diturunkan perbandingan X1 dan X2 sebagai berikut
s s
c s k
m s c s k ( 2.32 )
Substitusi s j ke dalam Persamaan (2.13) akan menghasilkan hubungan sebagai berikut
j
2.4.2 Penurunan Persamaan FT1/F2
Besar gaya transmisi yang diteruskan dari Massa 1 ke Massa 2 yaitu fT1(t) dapat diturunkan
berdasarkan diagram benda bebas sebagaimana tampak pada Gambar 2.8. Berdasarkan gambar ini dapat diturunkan persamaan keseimbangan berikut ini
15
Persamaan (2.16) kemudian diubah ke dalam bentuk fungsi transfer sehingga didapatkan
s k c s s k c s s ( 2.36 ) Selanjutnya substitusi s j ke dalam persamaan di atas, sehingga didapatkan persamaan
j
j
m c j m k j
| | √ m k | m| c ( 2.38 )
2.4.3 Penurunan Persamaan FT2/F2
Gaya eksitasi f2(t) yang diterima sistem menyebabkan adanya gaya yang ditransmisikan yaitu
fT2(t) ke pondasi. Besar fT2(t) dapat diperoleh berdasarkan diagram benda bebas pada Gambar 2.8
yaitu
f c k . ( 2.39 )
Persamaan (2.39) kemudian diubah ke dalam bentuk fungsi transfer sehingga diperoleh persamaan
s c s k s . ( 2.40 )
yang telah didapatkan sebagai Persamaan (2.31) kemudian disubstitusikan ke dalam Persamaan (2.40)
s
c s k m s c s k s
Substitusi s j ke dalam persamaan tersebut akan menghasilkan
j
j
[ m c j m k c c j c k c k j k k ]
| | √ k k m k c c m c c k c k
16
2.5 Persamaan Hubungan Transmisibilitas Gaya dengan Transmisibilitas Getaran
Persamaan (2.22) tidak dapat diaplikasikan secara langsung pada pengukuran nyata karena nilai k dan c dari sistem tidak diketahui sebelumnya. Oleh karena itu, diperlukan persamaan lain yang lebih mudah untuk diaplikasikan.
Pada ilustrasi sebelumnya telah dibahas tentang sistem getaran dengan dua derajat kebebasan sebagaimana tampak dalam Gambar 2.5. Berdasarkan Gambar 2.5 dapat dibuat diagram benda bebas untuk setiap massa. Diagram benda bebas sistem ini dapat dilihat pada Gambar 2.6. Kedua gambar tersebut perlu dimodifikasi sedikit untuk disesuaikan dengan persamaan yang lebih aplikatif. Modifikasi ini dapat dilihat dalam Gambar 2.9. Dalam Gambar 2.9 a1(t) merupakan
percepatan sesaat Massa 1, sedangkan a2(t) merupakan percepatan sesaat Massa 2.
Gambar 2.9 Sistem dua derajat kebebasan dengan respon percepatan
Berdasarkan Gambar 2.9 di atas dapat dibuat diagram benda bebas seperti yang diperlihatkan dalam Gambar 2.10. Dalam gambar ini terdapat dua buah gambar. Gambar sebelah kiri merupakan gambar diagram benda bebas untuk Massa 1. Sementara itu gambar sebelah kanan merupakan diagram benda bebas untuk Massa 2.
Berdasarkan diagram benda bebas pada Gambar 2.10 dapat dibuat persamaan gerak sistem
f t m a t f t . ( 2.42 )
Kemudian Persamaan (2.42) diubah ke dalam bentuk fungsi transfer
17
Gambar 2.10 Diagram benda bebas sistem yang dieksitasi pada Massa 1
Nilai s kemudian disubstitusi dengan j sehingga
j m j j ( 2.44 )
Kemudian berdasarkan Persamaan (2.44) dapat diperoleh persamaan FRF FT1/F1 yaitu
j diagram benda bebas Massa 2 memiliki persamaan gerak
f t f t m a t ( 2.47 )
Kemudian Persamaan (2.47) diubah ke dalam bentuk fungsi transfer dan nilai s disubstitusi
dengan j
m j j j ( 2.48 )
Berdasarkan Persamaan (2.48) dapat diketahui hubungan FRF FT2/F1. Nilai FT1 j telah
18
semua keadaannya sama dengan saat dieksitasi pada Massa 1, perbedaannya hanya pada letak gaya eksitasi yang diberikan.
Gambar 2.11 Sistem dengan respon percepatan saat diberi eksitasi di Massa 2
Berdasarkan Gambar 2.11 tersebut dapat dibuat diagram benda bebas yang diperlihatkan dalam Gambar 2.12. Dalam gambar ini terdapat dua buah diagram. Diagram sebelah kiri merupakan gambar diagram benda bebas Massa 1, sedangkan gambar sebelah kanan merupakan diagram benda bebas Massa 2. Dalam gambar ini juga dapat diketahui bahwa gaya dinamik yang ditransmisikan dari Massa 1 ke Massa 2 merupakan gaya tarik. Hal ini berbeda dengan saat dieksitasi pada Massa 1.
Gambar 2.12 Diagram benda bebas sistem saat dieksitasi pada Massa 2 Berdasarkan diagram benda bebas tersebut dapat dibuat persamaan gerak benda
19
Persamaan ini kemudian diubah ke bentuk fungsi transfer dan nilai s disubstitusi dengan j sehingga diperoleh
j m j ( 2.52 )
Berdasarkan Persamaan (2.52) dapat diperoleh persamaan FRF FT1/F2 yaitu
j
Selain itu, berdasarkan diagram benda bebas ini dapat diketahui juga persamaan gerak Massa 2 yaitu
f t f t f t m a t ( 2.55 ) Kemudian persamaan di atas diubah ke bentuk fungsi transfer dan substitusi s dengan j sehingga Persamaan (2.55) menjadi
j j j m j ( 2.56 ) Berdasarkan Persamaan (2.56) dapat diperoleh persamaan FRF FT2/F2
j
Metode logarithmic decrement adalah metode yang umum digunakan untuk mengukur konstanta redaman pada getaran bebas. Nilai logarithmic decrementdilambangkan dengan delta δ Nilai
δ merupakan nilai perbandingan logaritmik antara dua amplitudo getaran Metode ini dapat diterapkan berdasarkan grafik yang diperlihatkan pada Gambar 2.13. Dari grafik ini dapat diketahui nilai periode getaran teredam (Td) dan amplitudo getaran (X).
Nilai δ dapat diketahui berdasarkan persamaan
δ N ln
N ( 2.59 )
di mana : N = suku ke – N,
X1 = amplitudo getaran suku pertama (m), dan
XN = amplitudo getaran suku ke – N.
20
Gambar 2.13 Grafik hasil pengukuran dengan metode logaritmic decreement [9]
δ
√ δ ( 2.60 )
Selain itu, berdasarkan Gambar 2.13 telah diketahui nilai Td, sehingga dapat diketahui pula nilai
frekuensi peredaman d) yang besarnya
d
d ( 2.61 )
Berdasarkan nilai d dapat diketahui besar frekuensi pribadi n) dari sistem yang sedang diuji
dengan menggunakan persamaan
d n√ ( 2.62 )
Setelah nilai n diperoleh, nilai konstanta kekakuan isolator (k) dapat dihitung jika besarnya
massa telah diketahui, sehingga nilai konstanta redaman isolator (c) dapat diketahui berdasarkan persamaan
c m n, atau ( 2.63 )
21
Bab 3
Pengujian Identifikasi Parameter Dinamik dan Pemodelan Sistem
Bab ini akan membahas tentang obyek uji, identifikasi parameter dinamik, dan pemodelan sistem. Bab ini dibagi menjadi tiga subbab, di mana subbab pertama akan menjelaskan tentang obyek uji. Subbab kedua akan membahas tentang pengujian parameter dinamik sistem, sedangkan subbab terakhir akan membahas tentang pemodelan sistem yang meliputi pemodelan transmisibilitas getaran dan transmisibilitas gaya.
3.1 Obyek Uji
Obyek uji yang digunakan dalam penelitian ini diperlihatkan dalam Gambar 3.1. Dalam gambar ini tampak bahwa obyek uji terdiri dari dua buah massa dan dua buah isolator. Kedua massa dan kedua isolator ini dirangkai menjadi satu sistem dengan menggunakan linear bearing. Linear bearing berfungsi untuk membatasi gerak sistem, sehingga sistem hanya dapat bergerak pada arah vertikal dan sistem getaran memiliki dua derajat kebebasan. Linear bearing ini terdiri dari dua buah slider dan satu buah rel sebagai lintasannya. Slider ini berfungsi sebagai pemegang massa uji. Gambar teknik lengkap obyek uji ditampilkan pada Lampiran D.
22
Pada perangkat uji yang digunakan, Massa 1 memiliki massa sebesar 0,6 kg, sedangkan Massa 2 memiliki massa sebesar 6,6 kg. Massa 1 dan Massa 2 dipasang pada slider sehingga massa slider harus diperhitungkan sebagai bagian dari massa uji, di mana massa tiap slider adalah 0,2 kg. Jadi, massa Massa 1 bertambah menjadi 0,8 kg, sedangkan massa Massa 2 bertambah menjadi 6,8 kg. Sementara itu, isolator-isolator pada perangkat uji terbuat dari material karet yang karakteristik dinamiknya tidak diketahui. Oleh karena itu, isolator-isolator ini akan diuji terlebih dahulu untuk mencari karakteristik dinamiknya. Karakteristik dinamik yang dimaksud meliputi kekakuan dan redaman isolator.
3.2 Pengujian Paramater Dinamik
Pada pengujian ini ingin diukur parameter dinamik dari sistem yaitu konstanta kekakuan pegas dan redaman isolator. Isolator yang diukur berjumlah dua buah yaitu Isolator 1 dan Isolator 2. Isolator 1 adalah isolator yang diletakkan di bawah Massa 1, sedangkan Isolator 2 adalah isolator yang diletakkan di bawah Massa 2. Isolator 1 dan Isolator 2 dibuat dari material yang sama, namun dengan dimensi yang berbeda. Isolator ini tidak memiliki komposisi material yang diketahui sehingga nilai konstanta kekakuan dan redamannya tidak dapat dihitung dengan persamaan yang terdapat dalam Mekanika Kekuatan Material. Oleh karena itu, untuk mengukur nilai konstanta kekakuan dan redaman diperlukan pengujian dengan menggunakan metode logarithmic decrement.
3.2.1 Perangkat Pengujian
Perangkat uji pengukuran konstanta kekakuan dan redaman isolator diilustrasikan pada Gambar 3.2. Dalam gambar ini tampak bahwa alat uji yang digunakan terdiri atas satu buah isolator, satu buah massa, satu buah palu eksitasi, satu buah akselerometer, catu daya, PicoScope, dan komputer. Isolator yang diuji adalah Isolator 1 dan Isolator 2 yang dimensinya dapat dilihat dalam Subbab 3.1. Selain itu, dalam gambar ini juga tampak bahwa keluaran dari catu daya dicabang menjadi dua. Hal ini dilakukan untuk membandingkan grafik respon antara sinyal yang difilter dan tanpa filter.
23
Gambar 3.2 Perangkat pengujian konstanta kekakuan dan redaman isolator
3.2.2 Prosedur Pengujian
Pengujian ini dimulai dengan menyiapkan alat ukur dan alat akuisisi data yang digunakan. Setelah itu dilakukan pengaturan parameter pengujian yang akan digunakan. Pengukuran konstanta kekauan dan redaman isolator kemudian dapat dilakukan. Pengukuran ini dilakukan untuk Isolator 1 terlebih dahulu kemudian baru Isolator 2.
Setelah semua alat disusun seperti pada Gambar 3.2, langkah selanjutnya adalah mengatur parameter pengukuran pada perangkat lunak. Parameter pengukuran yang digunakan pada pengujian ini adalah sebagai berikut :
Waktu total pengambilan data : 50 ms
Sampling rate : 100 kHz
Coupling : AC
Saluran aktif : A dan B
Low pass filter : 50 Hz pada Saluran A
24
redaman Isolator 1. Setelah itu, pengujian diteruskan untuk mengukur konstanta kekakuan beserta redaman Isolator 2 yang memiliki prosedur pengujian yang sama dengan pengukuran konstanta kekakuan beserta redaman Isolator 1.
3.2.3 Hasil Pengujian dan Analisis
berdasarkan hasil pengujian parameter dinamik didapatkan dua buah grafik hasil pengukuran yaitu grafik hasil pengukuran Isolator 1 dan grafik hasil pengukuran Isolator 2. Grafik hasil pengukuran ini ditunjukkan pada Gambar 3.3. Grafik ini diperoleh dari hasil pengolahan data dengan menggunakan Matlab yang programnya dapat dilihat pada Lampiran B.1.
Gambar 3.3 Grafik hasil pengukuranIsolator 1
Berdasarkan Gambar 3.3 dapat diketahui besar dari setiap puncak sehingga dapat dihitung juga besarnya nilai konstanta kekakuan beserta redaman Isolator 1. Nilai tersebut didapatkan dari perhitungan dengan menggunakan Persamaan (2.40) sampai dengan Persamaan (2.45). Perhitungan konstanta kekakuan pegas dan redaman Isolator 1 adalah sebagai berikut
d ms s
δ ln
√
25
n
√
rad/s
k N/m
c √ Ns/m
Grafik hasil pengukuran untuk Isolator 2 diperlihatkan dalam Gambar 3.4. Grafik ini diperoleh dari pengolahan data dengan menggunakan Matlab. Program Matlab yang digunakan dapat dilihat pada Lampiran B.2.
Gambar 3.4 Grafik hasil pengukuranIsolator 2
Setelah didapatkan grafik pada Gambar 3.4, nilai konstanta kekakuan dan redaman Isolator 2 dapat dihitung dengan langkah sebagai berikut
d ms s
δ ln
√
26
Berdasarkan hasil pengujian logarithmic decrement di atas dapat diketahui bahwa nilai konstanta kekakuan dan redaman Isolator 2 lebih besar dibandingkan dengan Isolator 1. Hal ini sesuai dengan perbandingan panjang dan lebar antara keduanya di mana Isolator 2 lebih besar dibandingkan dengan dimensi Isolator 1.
3.3 Pemodelan Sistem
Pemodelan sistem dapat dilakukan dengan menggunakan persamaan yang telah diturunkan pada Bab 2. Pada persamaan-persamaan tersebut kemudian disubstitusi dengan parameter dinamik yang telah diperoleh dari pengujian logarithmic decrement. Pemodelan sistem ini dibagi menjadi dua yaitu pemodelan transmisibilitas gaya dan pemodelan transmisibilitas getaran.
3.3.1 Pemodelan Transmisibilitas Getaran
Transmisibilitas getaran yang terjadi dapat diakibatkan oleh sumber eksitasi yang berbeda yaitu eksitasi pada Massa 1 dan eksitasi pada Massa 2. Transmisibilitas getaran akibat eksitasi pada Massa 1 dapat didapatkan melalui Persamaan (2.15). Berdasarkan Persamaan (2.15) dapat dibuat grafik transmisibilitas getaran seperti yang ditunjukkan pada Gambar 3.5. Grafik ini diperoleh dengan menggunakan Matlab yang programnya dapat dilihat pada Lampiran B.3. Dalam gambar ini tampak bahwa terdapat satu puncak pada saat frekuensi 21,96 Hz dengan amplitudo 0,8026. Selain itu, jika eksitasi pada Massa 2, transmisibilitas getaran dapat diperoleh dengan menggunakan Persamaan (2.34). Berdasarkan persamaan ini dapat dibuat grafik transmisibilitas getaran seperti yang ditunjukkan pada Gambar 3.6. Dalam gambar ini tampak bahwa amplitudo terbesar yaitu bernilai 5,172 pada saat frekuensi 26,1 Hz. Grafik tranmisibilitas getaran diperoleh dengan menggunakan program Matlab sebagaimana dapat dilihat pada Lampiran B.4.
3.3.2 Pemodelan Transmisibilitas Gaya
Gaya transmisi terjadi akibat adanya gaya eksitasi yang diberikan kepada sistem. Gaya transmisi pada penilitian ini ada dua yaitu FT1 dan FT2. FT1 adalah gaya yang ditransmisikan dari Massa 1
ke Massa 2, sedangkan FT2 adalah gaya yang ditransmisikan dari Massa 2 ke pondasi. Gaya
27
Gambar 3.5 Transmisibilitas getaran X2/X1, dengan eksitasi pada Massa 1
Gambar 3.6 Transmisibilitas getaran X1/X2 , dengan eksitasi pada Massa 2
Berdasarkan Persamaan (2.19) dapat dibuat grafik transmisibilitas gaya FT1/F1 yang
28
yang dominan yaitu pada saat frekuensi 17,75 Hz dengan amplitudo 2,549 dan 28,97 Hz dengan amplitudo 3,164.
Gambar 3.7 Transmisibilitas gaya FT1/F1 , dengan eksitasi pada Massa 1
Berdasarkan Persamaan (2.22) dapat dibuat grafik transmisibilitas gaya FT2/F1 yang
diperlihatkan pada Gambar 3.8. Dalam gambar ini tampak bahwa grafik ini hanya memiliki satu puncak yang dominan pada saat frekuensi 18,38 Hz dengan amplitudo 9,451.
29
Selain eksitasi pada Massa 1, eksitasi dapat terjadi pada Massa 2 yang akan menimbulkan transmisi gaya FT1 dan FT2. Transmisi gaya ini dapat diketahui dengan Persamaan (2.38) dan
Persamaan (2.41). Berdasarkan Persamaan (2.38) dapat dibuat grafik transmisibilitas gaya seperti yang ditunjukkan pada Gambar 3.9. Dalam gambar ini tampak adanya dua puncak pada frekuensi 18,62 Hz dengan tinggi 0,9087 dan pada frekuensi 28,25 Hz dengan tinggi 0,7185. Berdasarkan Persamaan (2.41) dapat dibuat grafik transmisibilitas gaya sebagaimana ditunjukkan pada Gambar 3.10. Dalam gambar ini tampak bahwa grafik tersebut memiliki satu puncak yang dominan pada saat frekuensi 18,14 Hz dengan tinggi 5,457. Grafik ini dibuat dengan menggunakan program Matlab sebagaimana dapat dilihat pada Lampiran B.4.
Gambar 3.9 Transmisibilitas gaya FT1/F2 , dengan eksitasi pada Massa 2
30
Bab 4
Pengujian Transmisibilitas Gaya dan Getaran
Bab ini akan membahas tentang pengujian transmisibilitas gaya dan getaran yang dibagi menjadi tiga subbab. Subbab yang pertama akan membahas tentang pengujian frekuensi pribadi tiang penyangga, sedangkan subbab kedua akan membahas tentang pengujian transmisibilitas pada Isolator 1, dan subbab terakhir akan membahas tentang pengujian transmisibilitas pada Isolator 2.
4.1 Pengujian Frekuensi Pribadi Tiang Penyangga
Sebelum dilakukan pengujian transmisibilitas pada Isolator 1 dan Isolator, terlebih dahulu dilakukan pengujian frekuensi pribadi dari tiang penyangga. Pengujian ini dapat dilihat dalam Lampiran C. Berdasarkan hasil pengujian pada Lampiran C dapat diketahui muncul beberapa puncak yang berasal dari frekuensi pribadi tiang penyangga. Puncak ini terjadi pada frekuensi di atas 45,31 Hz.
4.2 Pengukuran Transmisibilitas pada Isolator 1
Setelah nilai konstanta kekakuan beserta redaman isolator didapatkan, pengujian dilanjutkan dengan pengukuran transmisibilitas gaya pada Isolator 1. Pada pengujian ini ingin diperoleh besar gaya dinamik yang ditransmisikan dari Massa 1 ke Massa 2, yaitu FT1. Besar FT1
didapatkan melalui dua cara, yaitu melalui pengukuran langsung dengan menggunakan load cell dan melalui pengukuran tidak langsung menggunakan akselerometer. Kedua hasil pengukuran ini kemudian dibandingkan.
4.2.1 Perangkat Pengujian Transmisibilitas pada Isolator 1
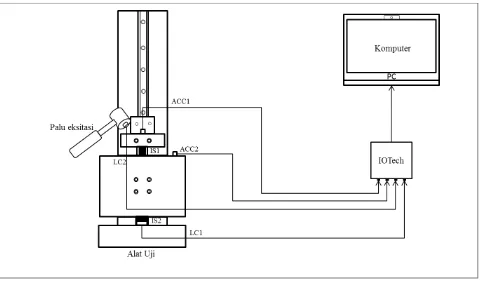
Skema pengukuran FT1 dapat dilihat dalam Gambar 4.1. Pada gambar ini tampak bahwa alat
yang digunakan terdiri dari sebuah palu eksitasi, dua buah accelerometer yaitu ACC1 dan ACC2, dua buah load cell yaitu LC1 dan LC2, iOtech, dan komputer. LC1 diletakkan pada ujung palu pengeksitasi, sedangkan LC2 diletakkan di bawah Isolator 1 (IS1). IS1 diletakkan di bawah Massa 1, sedangkan Isolator 2 (IS2) diletakkan di bawah Massa 2. Untuk memperjelas Gambar 4.1, dapat dilihat foto dalam Lampiran A.3.
31
pada Massa 2. Sementara itu, LC1 yang digunakan adalah jenis Omega DLC 101-100 dengan sensitivitas 53,9 mV/lbf yang digunakan untuk mengukur gaya dinamik yang diberikan, sedangkan LC2 adalah jenis Omega DLC 101-10 dengan sensitivitas 526,6 mV/lbf yang digunakan untuk mengukur FT1. Keempat sensor ini akan menghasilkan sinyal hasil pengukuran
yang kemudian disalurkan ke iOtech. Sinyal ini kemudian diteruskan ke komputer yang telah dilengkapi dengan perangkat lunak ezAnalyst. Perangkat lunak ini berfungsi untuk memproses dan menampilkan sinyal yang didapatkan dari hasil pengukuran.
Gambar 4.1 Perangkat pengujian transmisibilitas Isolator 1
4.2.2 Prosedur Pengujian Transmisibilitas pada Isolator 1
Pengujian ini dimulai dengan menyiapkan alat ukur dan alat akuisisi data yang digunakan seperti pada Gambar 4.1. Setelah semua alat disusun seperti pada Gambar 4.1, langkah selanjutnya adalah mengatur parameter pengukuran pada perangkat lunak. Parameter pengukuran yang digunakan pada pengujian ini adalah sebagai berikut :
Rentang frekuensi : 5000 Hz Jumlah garis spektrum : 12800
Trigger : kanal masukan
Kanal masukan : 1
Averaging : linear (+)
32
Selain itu, dalam pengujian ini diperlukan pengaturan FFT sebagai berikut : Window kanal respon : eksponensial
Decay : 5 %
Window kanal referensi : rectangular
Mulai window : 4,961 %
Berhenti window : 5,076 %
Pengukuran transmisibilitas gaya pada Isolator 1 kemudian dilakukan dengan memberikan gaya eksitasi pada masing-masing massa secara bergantian. Gaya eksitasi diberikan kepada Massa 1 terlebih dahulu kemudian diberikan kepada Massa 2. Akibat gaya eksitasi ini akan ada gaya yang ditransmisikan melalui Isolator 1 dan juga akan timbul getaran pada Massa 1 dan Massa 2. Gaya yang ditransmisikan diukur secara langsung dengan menggunakan LC2, sedangkan getaran yang terjadi pada tiap massa diukur dengan menggunakan ACC1 dan ACC2. Hasil dari pengukuran getaran ini kemudian diolah secara matematik dengan menggunakan Persamaan (2.46) dan Persamaan (2.54) yang telah diturunkan di Bab 2. Pengolahan data secara matematik dilakukan pada perangkat lunak Matlab. Berdasarkan pengolahan data ini, dapat diperoleh grafik perbandingan transmisibilitas gaya secara langsung dan berdasarkan Persamaan (2.46) dan Persamaan (2.54)
4.2.3 Hasil Pengujian dan Analisis Transmisibilitas pada Isolator 1 saat Dieksitasi pada Massa 1
Pada pengujian ini didapatkan tiga buah data yaitu FRF A1/F1, A2/F1, dan FT1/F1. Data pengujian
33
Grafik FRF A1/F1 diperlihatkan pada Gambar 4.2. Dalam gambar ini tampak dua buah grafik
yaitu grafik magnitude dan koherensi. Pada grafik magnitude terdapat dua buah puncak. Puncak yang muncul yang terjadi pada yaitu pada frekuensi 17,97 Hz dan 28,91 Hz. Puncak pada frekuensi 17,97 Hz memiliki magnitude sebesar 2,395 G/lbf yang berarti bahwa pada frekuensi ini sistem akan bergetar dengan percepatan 2,395 G saat dieksitasi dengan gaya sebesar 1 lbf di mana besar 1 G adalah besar percepatan bumi. Puncak yang muncul pada rekuensi 28,91 Hz memiliki magnitude sebesar 4,14 G/lbf.
Gambar 4.2 Hasil pengukuran FRF A1/F1 pengujian Isolator 1
Kedua nilai frekuensi tersebut dapat dikatakan sebagai frekuensi pribadi karena memiliki magnitude yang paling besar. Selain itu, berdasarkan grafik koherensi keduanya juga memiliki nilai yang tinggi yaitu 0,9957 pada frekuensi 17,97 Hz dan 0,991 pada frekuensi 28,91 Hz. Nilai koherensi yang tinggi berarti bahwa respon tersebut berasal dari gaya eksitasi F1 yang diberikan
kepada sistem.
Hasil pengujian selanjutnya adalah grafik FRF A2/F1 sebagaimana ditunjukkan dalam Gambar
34
yang tinggi berarti bahwa respon yang terjadi akibat gaya eksitasi yang diberikan. Selain itu, pada pengujian ini juga muncul frekuensi pribadi dari tiang penyangga yaitu pada rentang frekuensi 140 Hz–160 Hz dan pada rentang frekuensi 180 Hz–200 Hz.
Gambar 4.3 Hasil pengukuran FRF A2/F1 pengujian Isolator 1
Berdasarkan hasil pengujian FRF A1/F1 dan pengujian FRF A2/F1 dapat dibuat grafik
transmisibilitas getaran A2/A1 yang diperlihatkan dalam Gambar 4.4. Grafik ini diperoleh dengan
cara membagi hasil FRF A2/F1 dengan hasil FRF A1/F1. Dalam gambar ini dapat dilihat terdapat
hanya satu puncak yang dominan yaitu pada frekuensi 21,48 Hz dengan magnitude 0,7701 G/G. Dalam gambar ini juga tampak adanya frekuensi pribadi dari tiang penyangga yaitu pada rentang frekuensi 140 Hz–160 Hz dan 180 Hz–200 Hz.
Grafik pengujian yang terakhir adalah grafik FRF FT1/F1 yang diperlihatkan pada Gambar 4.5.
35
Gambar 4.4 Transmisibilitas getaran A2/A1 hasil pembagian A2/F1 dan A1/F1
Gambar 4.5 Hasil pengujian FT1/F1
36
4.2.4 Perbandingan Hasil Pemodelan dan Pengujian saat Eksitasi diberikan pada Massa 1
Pada Bab 3 telah dibuat grafik pemodelan transmisibilitas getaran dan transmisibilitas gaya. Grafik hasil pemodelan ini kemudian dibandingkan dengan grafik transmisibilitas getaran dan transmisibilitas gaya yang diperoleh dari hasil pengujian pada Subbab 4.1.3.
Grafik perbandingan transmisibilitas getaran antara pemodelan dan pengujian diperlihatkan pada Gambar 4.6. Dalam gambar ini dapat dilihat bahwa secara keseluruhan kedua grafik memiliki bentuk yang mirip. Kedua grafik sama-sama memiliki satu puncak yang dominan yaitu pada frekuensi 21,96 Hz untuk grafik hasil pemodelan dan 21,48 Hz untuk grafik hasil pengujian. Namun, grafik hasil pengujian memiliki bentuk yang berbeda dengan grafik hasil pemodelan pada frekuensi rendah. Hal ini karena pada pengujian FRF A2/F1 pada frekuensi rendah memiliki
magnitude yang cukup besar sedangkan FRF A1/F1 memiliki magnitude yang cukup kecil
sehingga ketika A2/F1 dibagi A1/F1 hasilnya sangat besar. Selain itu, ada perbedaan lain yaitu
muncul frekuensi pribadi dari tiang penyangga pada frekuensi di atas 100 Hz.
Gambar 4.6 Perbandingan transmisibilitas A2/A1 hasil pemodelan dan pengujian Isolator 1
Selain grafik transmisibilitas getaran A2/A1, pada penelitian ini juga didapatkan grafik
transmisibilitas gaya FT1/F1 baik yang diperoleh dari pemodelan maupun pengujian sebagaimana
37
pada frekuensi 17,75 Hz dengan magnitude sebesar 2,549 lbf/lbf, sedangkan frekuensi pribadi kedua terjadi pada frekuensi 28,97 Hz dengan magnitude sebesar 3,164 lbf/lbf. Pada grafik hasil pengujian, frekuensi pribadi pertama terjadi pada frekuensi 17,19 Hz dengan magnitude sebesar 2,571 lbf/lbf, sedangkan frekuensi pribadi yang kedua terjadi pada frekuensi 28,13 Hz dengan magnitude sebesar 3,144 lbf/lbf.
Gambar 4.7 Perbandingan transmisibilitas gaya FT1/F1 hasil pemodelan dan pengujian Isolator 1 4.2.5 Perbandingan Antara Nilai Transmisibilitas Gaya yang Diukur Secara Langsung dan
Tidak Langsung saat Eksitasi Diberikan pada Massa 1
Pada pengujian ini juga ingin diketahui perbandingan antara nilai transmisibilitas gaya yang diukur secara langsung oleh load cell dan nilai transmisibilitas gaya yang diperoleh secara tidak langsung dari perhitungan hasil pengukuran transmisibilitas getaran yang diukur dengan akselerometer. Perhitungan ini menggunakan Persamaan (2.46). Perbandingan kedua hasil pengujian ini ditunjukkan pada Gambar 4.8. Berdasarkan Gambar 4.8 dapat diketahui bahwa kedua grafik memiliki bentuk yang sangat mirip di mana pada keduanya terdapat dua buah puncak. Kedua puncak ini adalah frekuensi pribadi dari sistem yaitu pada frekuensi 17,19 Hz dan 28,13 Hz. Selain itu, frekuensi pribadi dari tiang penyangga tidak muncul pada kedua hasil pengujian tersebut.
38
Gambar 4.8 Perbandingan FRF FT1/F1 pengukuran langsung dan tidak langsung
Pada pengujian ini didapatkan tiga buah data yaitu grafik FRF A1/F2, A2/F2, dan FT1/F2. Data
pengujian diperoleh dengan menggunakan iOtech dan kemudian diolah dengan menggunakan Matlab. Program Matlab yang digunakan dapat dilihat pada Lampiran B.6. Grafik FRF A1/F2
diperlihatkan pada Gambar 4.9. Dalam gambar ini tampak dua buah puncak yaitu pada frekuensi 20,31 Hz dan 27,34 Hz. Puncak yang muncul pada frekuensi 20,31 Hz memiliki magnitude 0,9763 G/lbf, sedangkan puncak yang muncul pada frekuensi 27,34 Hz memiliki magnitude 0,9635 G/lbf.
39
Kedua nilai frekuensi ini dapat disebut sebagai frekuensi pribadi karena memiliki nilai magnitude yang paling besar. Selain itu, berdasarkan grafik koherensi keduanya memiliki nilai yang tinggi yaitu 0,9972 pada frekuensi 20,31 Hz dan 0,9979 pada frekuensi 27,34 Hz. Nilai koherensi yang tinggi berarti bahwa respon tersebut berasal dari gaya eksitasi yang diberikan. Berdasarkan grafik magnitude juga dapat diketahui bahwa frekuensi pribadi dari tiang penyangga muncul pada frekuensi di atas 100 Hz.
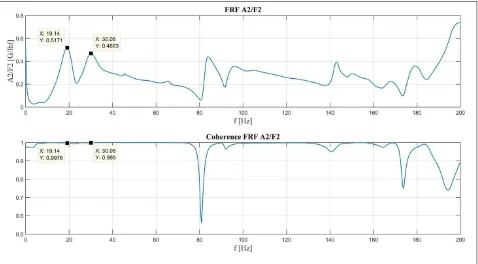
Hasil pengujian berikutnya adalah FRF A2/F2 sebagaimana ditunjukkan pada Gambar 4.10.
Dalam gambar ini tampak dua puncak yang merupakan frekuensi pribadi dari sistem yaitu pada frekuensi 19,14 Hz dan 30,08 Hz. Puncak pada frekuensi 19,14 Hz memiliki magnitude sebesar 0,5171 G/lbf, sedangkan puncak pada frekuensi 30,08 Hz memiliki magnitude sebesar 0,4683 G/lbf. Kedua nilai frekuensi dapat disebut frekuensi pribadi karena memiliki magnitude terbesar dibandingkan dengan magnitude pada frekuensi lainnya.
Gambar 4.10 Hasil pengukuran FRF A2/F2 pengujian Isolator 1
Selain itu, kedua frekuensi juga memiliki koherensi yang tinggi yaitu 0,9976 pada frekuensi 19,14 Hz dan 0,999 pada frekuensi 30,08 Hz. Nilai koherensi yang tinggi berarti bahwa respon berasal dari gaya eksitasi yang diberikan. Berdasarkan grafik magnitude juga dapat dilihat bahwa pada pengujian ini muncul frekuensi pribadi dari tiang penyangga pada frekuensi di atas 80 Hz. Berdasarkan hasil pengujian FRF A1/F2 dan A2/F2 dapat dibuat grafik transmisibilitas getaran
40
membagi hasil FRF A1/F2 dengan hasil FRF A2/F2. Dalam gambar ini tampak hanya satu puncak
yang dominan pada frekuensi 23,44 Hz. Hal ini berarti bahwa pada pengujian ini, transmisibilitas getaran terbesar terjadi pada frekuensi 23,44 Hz dengan magnitude sebesar 4,944 G/G.
Gambar 4.11 Transmisibilitas getaran A1/A2 hasil pembagian A1/F2 dan A2/F2
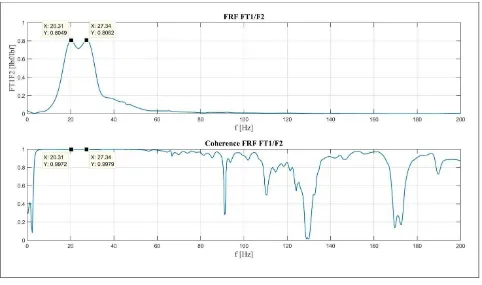
Grafik hasil pengujian yang terakhir adalah grafik FRF FT1/F2 sebagaimana ditunjukkan pada
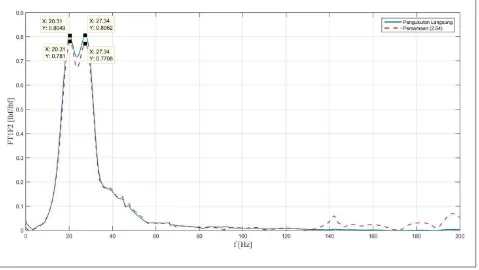
Gambar 4.12. Berdasarkan grafik magnitude dapat diketahui bahwa terdapat dua puncak pada frekuensi 20,31 Hz dengan magnitude sebesar 0,8049 lbf/lbf dan pada frekuensi 27,34 Hz dengan magnitude sebesar 0,8062. Kedua puncak ini merupakan frekuensi pribadi sistem karena memiliki nilai magnitude terbesar. Selain itu, kedua frekuensi juga memiliki nilai koherensi yang tinggi yaitu 0,9972 pada frekuensi 20,31 Hz dan 0,9979 pada frekuensi 27,34 Hz. Berdasarkan grafik magnitude ini juga dapat diketahui bahwa sistem isolasi getaran terjadi sepanjang frekuensi yang dianalisis. Hal ini ditandai dengan besar FT1 yang selalu kurang dari satu yang
berarti gaya yang ditransmisikan selalu lebih kecil jika dibandingkan dengan gaya eksitasi yang diberikan.
4.2.7 Perbandingan Hasil Pemodelan dan Pengujian saat Eksitasi Diberikan pada Massa 2
Transmisibilitas getaran dan transmisibilitas gaya saat sistem dieksitasi pada Massa 2 telah dimodelkan pada Bab 3. Hasil pemodelan ini kemudian dibandingkan dengan hasil pengujian transmisibilitas getaran dan transmisibilitas gaya yang telah diperoleh pada Subbab 4.1.6.
Pemodelan transmisibilitas getaran A1/A2 antara pemodelan dan pengujian dapat dilihat pada
41
Gambar 4.12 Grafik pengukuran FRF FT1/F2
Kedua grafik sama-sama memiliki satu puncak. Puncak pada grafik hasil pemodelan terjadi pada frekuensi 26,1 Hz dengan magnitude sebesar 5,172 G/G, sedangkan puncak pada grafik hasil pemodelan terjadi pada frekuensi 23,44 Hz dengan magnitude sebesar 4,944 G/G. Namun, pada frekuensi di atas 100 Hz terjadi perbedaan yaitu muncul puncak yang berasal dari frekuensi pribadi tiang pada grafik hasil pengujian.
42
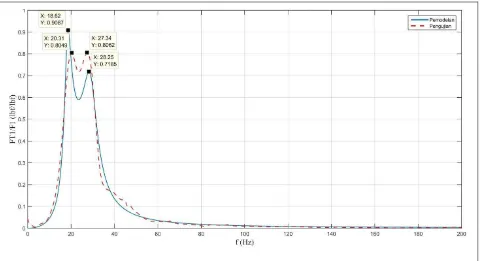
Grafik perbandingan transmisisibilitas gaya antara pemodelan dan pengujian ditunjukkan pada Gambar 4.14. Dalam gambar ini juga tampak bahwa kedua grafik memiliki bentuk yang mirip. Kedua grafik memiliki dua buah puncak yang berasal dari frekuensi pribadi sistem. Puncak pada grafik hasil pengujian terletak pada frekuensi 18,62 Hz dengan magnitude sebesar 0,9067 lbf/lbf dan 28,33 Hz dengan magnitude sebesar 0,7184 lbf/lbf, sedangkan puncak pada grafik hasil pengujian terjadi pada frekuensi 20,31 Hz dengan magnitude sebesar 0,8049 lbf/lbf dan 27,34 Hz dengan magnitude sebesar 0,8062 lbf/lbf.
Gambar 4.14 Perbandingan transmisibilitas gaya FT1/F2 hasil pemodelan dan pengujian Isolator 1 4.2.8 Perbandingan Antara Nilai Transmisibilitas Gaya yang Diukur Secara Langsung dan
Tidak Langsung saat Eksitasi Diberikan pada Massa 2
Pada pengujian ini juga ingin diperoleh perbandingan antara nilai transmisibilitas gaya yang diukur secara langsung oleh load cell dan secara tidak langsung dari perhitungan hasil pengukuran transmisibilitas getaran yang diukur dengan accelerometer. Perhitungan ini dengan menggunakan Persamaan (2.54).
43
dari tiang penyangga pada rentang frekuensi 140 Hz-160Hz dan 180 Hz-200Hz pada grafik hasil Persamaan (2.54).
Gambar 4.15 Perbandingan FRF FT1/F2 pengukuran langsung dan tidak langsung 4.3 Pengukuran Transmisibilitas pada Isolator 2
Pada subbab ini akan dibahas tentang hasil pengukuran gaya dinamik yang ditransmisikan dari Massa 2 ke pondasi yaitu FT2. Gaya dinamik ini terjadi akibat adanya gaya eksitasi yang
diberikan pada Massa 1 yaitu F1 dan gaya eksitasi yang diberikan pada Massa 2 yaitu F2. Gaya
dinamik yang ditransmisikan diukur secara langsung dengan menggunakan load cell yang diletakkan di bawah Isolator 2. Selain itu, pengukuran juga dilakukan pada getaran yang terjadi dengan menggunakan accelerometer. Hasil pengukuran ini kemudian diolah dengan menggunakan persamaan yang sudah diturunkan pada Bab 2 untuk mengukur nilai transmisibilitas gaya secara tidak langsung. Pengukuran nilai transmisibilitas gaya secara tidak langsung kemudian dibandingkan dengan pengukuran secara langsung.
Secara keseluruhan prosedur pengujian yang dilakukan untuk mengukur FT2 mirip dengan
prosedur pengujian untuk mengukur FT1 pada Subbab 4.1. Pengujian ini memiliki perbedaan
44
4.3.1 Perangkat Pengujian Transmisibilitas pada Isolator 2
Perangkat pengujian transmisibilitas pada Isolator 2 dapat dilihat dalam Gambar 4.16. Pada gambar ini dapat dilihat bahwa alat yang digunakan mirip dengan pengujian sebelumnya yang terdiri dari sebuah palu eksitasi, dua buah accelerometer yaitu ACC1 dan ACC2, dua buah load cell yaitu LC1 dan LC2, iOtech, dan sebuah komputer. Alat-alat ini memiliki fungsi yang sama dengan pengujian sebelumnya. Perbedaan pengujian ini dengan pengujian sebelumnya adalah peletakan load cell. Pada pengujian ini LC2 jenis Omega DLC 101-10 diletakkan pada ujung palu eksitasi, sedangkan LC1 jenis Omega DLC 101-100 diletakkan di bawah Isolator 2 (IS2) yang digunakan untuk mengukur gaya dinamik yang ditransmisikan dari Massa 2 ke pondasi. Untuk memperjelas penjelasan pada Gambar 4.16 dapat dilihat foto yang terdapat dalam Lampiran A.4.
4.3.2 Prosedur Pengujian Transmisibilitas pada Isolator 2
Prosedur pengujian ini dimulai dari menyiapkan alat ukur dan alat akuisisi data yang digunakan seperti pada Gambar 4.16. Setelah semua alat disusun seperti pada Gambar 4.16, langkah selanjutnya adalah mengatur parameter pengukuran pada perangkat lunak. Parameter pengukuran yang digunakan pada pengujian ini adalah sebagai berikut :
Rentang frekuensi : 5000 Hz Jumlah garis spektrum : 12800
Trigger : kanal masukan
Kanal masukan : 1
Averaging : linear (+)
Jumlah perataan : 10
Selain itu, dalam pengujian ini diperlukan pengaturan FFT sebagai berikut : Window kanal respon : eksponensial
Decay : 5 %
Window kanal referensi : rectangular Mulai window : 4,961 % Berhenti window : 5,076 %
45
Gambar 4.16 Perangkat pengujian transmisibilitas Isolator 2
4.3.3 Hasil Pengujian dan Analisis Transmisibilitas pada Isolator 2 saat Eksitasi Diberikan pada Massa 1
Pada pengujian ini didapatkan tiga buah hasil yaitu FRF A1/F1, A2/F1, dan FT2/F1. Data ini
didapatkan dengan menggunakan iOtech dan diolah dengan menggunakan Matlab. Program Matlab yang digunakan dapat dilihat pada Lampiran B.7. Setiap hasil pengujian terdapat dua buah grafik yaitu grafik magnitude dan grafik koherensi.
Grafik FRF A1/F1 diperlihatkan pada Gambar 4.17. Dalam gambar ini tampak dua puncak pada
frekuensi 18,75 Hz dan 31,64 Hz. Puncak pada frekuensi 18,75 Hz memiliki magnitude sebesar 2,176 G/lbf, sedangkan puncak pada frekuensi 31,64 Hz memiliki magnitude sebesar 4,495 G/lbf. Kedua nilai frekuensi dapat disebut sebagai frekuensi pribadi sistem karena memiliki nilai magnitude terbesar dibandingkan dengan nilai magnitude frekuensi yang lain. Selain itu, pada kedua frekuensi ini memiliki nilai koherensi yang tinggi yaitu sebesar 0,9992 pada frekuensi 18,75 Hz dan 0,9957 pada frekuensi 31,64 Hz. Nilai koherensi yang tinggi berarti bahwa respon tersebut berasal dari gaya eksitasi yang diberikan.
Hasil pengujian berikutnya adalah grafik FRF A2/F1 sebagaimana ditunjukkan pada Gambar
46
Gambar 4.17 Hasil pengukuran FRF A1/F1 pengujian Isolator 2
magnitude sebesar 0,8603. Kedua frekuensi ini disebut frekuensi pribadi dari sistem karena pada kedua memiliki nilai magnitude terbesar. Selain itu, berdasarkan grafik koherensi, kedua frekuensi ini memiliki nilai koherensi yang tinggi. Nilai koherensi saat frekuensi 19,92 Hz sebesar 0,9983, sedangkan nilai koherensi saat frekuensi 29,3 Hz sebesar 0,9965. Nilai koherensi yang tinggi berarti bahwa respon berasal dari gaya eksitasi yang diberikan.
Berdasarkan hasil pengujian FRF A1/F1 dan FRF A2/F1 dapat dibuat grafik transmisibilitas
getaran sebagaimana ditunjukkan pada Gambar 4.19. Dalam gambar ini tampak hanya satu puncak pada frekuensi 21,88 Hz dengan magnitude sebesar 0,9133 G/G. Nilai ini artinya adalah Massa 2 akan bergetar sebesar 0,9133 G saat Massa 1 bergetar 1 G. Selain itu, pada grafik ini juga muncul frekuensi pribadi dari tiang penyangga pada rentang frekuensi 40 Hz-60 Hz, frekuensi 140 Hz, dan rentang frekuensi 180 Hz-200 Hz.
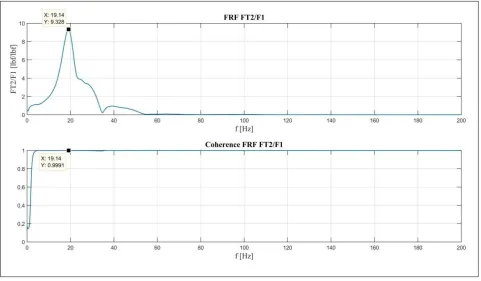
Grafik pengujian yang terakhir adalah grafik FRF FT2/F1 sebagaimana diperlihatkan pada
47
Gambar 4.18 Hasil pengukuran FRF A2/F1 pengujian Isolator 2
Gambar 4.19 Transmisibilitas getaran A2/A1 hasil pembagian A2/F1 dan A1/F1
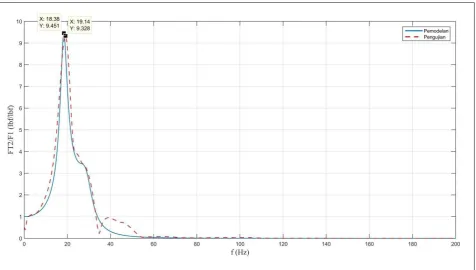
4.3.4 Perbandingan Hasil Pemodelan dan Pengujian saat Eksitasi Diberikan pada Massa 1
Pada Bab 3 telah dibuat pemodelan transmisibilitas getaran A2/A1 dan transmisibilitas gaya
FT2/F1. Hasil dari pemodelan ini kemudian dibandingkan dengan hasil dari pengujian yang telah