Prototype Mechanical Screen Untuk Rumah Pompa Di Sungai (Penyaring Sampah Pada Sungai) | Santoso | Widya Teknik 1 PB
Teks penuh
Gambar
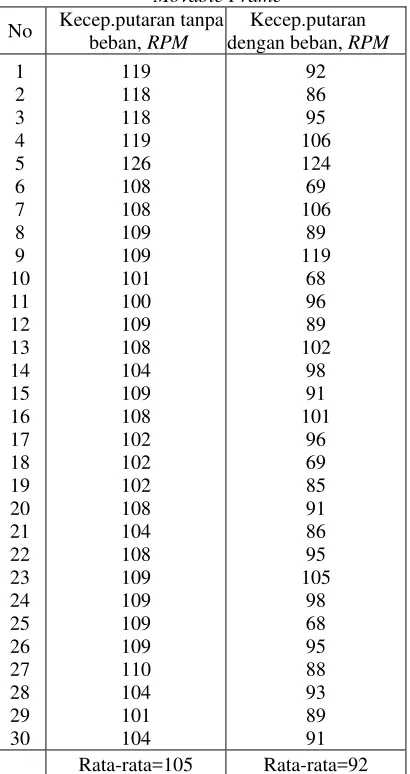
![Gambar 1 sebagai berikut[5]:](https://thumb-ap.123doks.com/thumbv2/123dok/3566785.1782455/3.612.86.292.115.260/gambar-sebagai-berikut.webp)


Dokumen terkait
Potensi buah pisang sangat besar dalam menunjang peningkatan pendapatan masyarakat petani, selain itu pisang juga menjadi bahan baku industri olahan keripik dan komoditas
14 Dalam menyusun rekomendasi, auditor harus berpegang teguh kepada ketentuan / peraturan yang berlaku dengan tetap mempertimbangkan agar rekomendasi
Sepatu adalah alat untuk menutupi atau sebagai alas kaki yang terbuat dari kulit, kain maupun bahan lainnya. Umumnya alas kaki terbagi 2 jenis, yaitu tipe mokasin dan
195 DKI Jakarta Jakarta Utara Klinik Your Clinic (Mall Of Indonesia - MOI) Kelapa Gading Ruko Kelapa Gading Square Italian Walk, Blok C No. 51,52,53 N Y Y 196 DKI Jakarta Jakarta
Perencanaan dan pengelolaan sumberdaya alam pesisir dan laut perlu dipertimbangkan secara cermat dan tepadu dalam setiap perencanaan pembangunan, agar dapat dicapai
Hal ini juga ditunjukkan oleh enzim protease yang didapat dari daun kelor, enzim protease ini tidak hanya memiliki aktivitas yang tinggi pada substrat kasein, tetapi juga
Dari hasil ini akan diambil 2 efikasi dengan nilai terbesar dari setiap kelompok yang dianggap dominan untuk dikaitkan hubungannya dengan tanaman yang dianggap dominan
Pentingnya penelitian tentang jaminan pelayanan yaitu untuk melihat kepuasan pasien terhadap kesopan santunan dan kemampuan pegawai rumah sakit untuk menumbuhkan rasa
