Abstrak – Paper ini membahas koordinasi Kontroler PID dan Thyristor Controlled Phase Shifter (TCPS) pada Load frequency Control (LFC) menggunakan Imperialist Competitive Algorithm (ICA). Untuk mendapatkan koordinasi yang optimal, parameter pada PID dan TCPS dioptimisasi dengan menggunakan ICA. Simulasi menunjukkan bahwa parameter PID dan TCPS yang dioptimisasi dengan menggunakan ICA dapat mempercepat time settling dari frekuensi plant tersebut. Pada area 1 untuk PID tanpa TCPS didapatkan overshoot -0.0002666 pu dan time settling >20 detik. Untuk PID dengan TCPS konvensional didapatkan overshoot -0.0002631 pu dan time settling 14 detik. Untuk PID dan TCPS yang dioptimisasi menggunakan ICA didapatkan overshoot -0.000222 pu dan time settling 13 detik. Sedangkan pada area 2 untuk PID tanpa TCPS didapatkan overshoot -3x105 pu dan time settling >30 detik. Untuk PID dan TCPS konvensional didapatkan overshoot -1x105 pu dan time settling >30 detik. Untuk PID dan TCPS yang dioptimisasi menggunakan ICA didapatkan overshoot -1x104 pu dan time settling 20 detik.
Kata Kunci — load frequency control, proporsional
integral differensial, thyristor controlled phase shifter,
imperialist competitive algorithm
I. PENDAHULUAN
erkembangan pesat teknologi telah meningkatkan jumlah konsumsi daya energi listrik. Listrik yang disuplai oleh konsumen tidak hanya harus baik dalam kuantitas, tetapi juga baik dalam kualitas. Salah satu parameter kualitas tenaga listrik adalah frekuensi yang konstan. Oleh karena itu pembangkit tenaga listrik berusaha untuk menjaga agar frekuensi tetap konstan [1]. Perubahan daya dalam skala yang besar secara tiba-tiba menyebabkan perubahan frekuensi pada sistem tenaga listrik yang disertai dengan osilasi. LFC dapat dilakukan dengan menggunakan aksi kontrol integral gain pada governor. Kontroler PID dapat digunakan untuk mendapatkan hasil yang lebih baik. Selain itu, osilasi frekuensi juga dapat diredam dengan menambahkan peralatan FACTS pada tenaga listrik. FACTS yang digunakan adalah TCPS. TCPS merupakan peralatan kontrol daya aktif pada saluran transmisi dengan menggeser fasa. Kontrol daya aktif dapat mengurangi osilasi pada sistem [2].
Pada paper ini membahas koordinasi dari kontroler PID dan TCPS yang diaplikasikan pada sistem tenaga listrik multiarea. Parameter-parameter PID dan TCPS dioptimisasi menggunakan Imperialist Competitive Algorithm (ICA).
II. PEMODELANSISTEM DAN ALGORITMA A. Pemodelan LFC pada Sistem Tenaga Listrik 2 Area
Pada paper ini, pemodelan LFC 2 area menggunakan model dari Hadi Saadat. Model LFC terdapat pada gambar 1. Data parameter sistem yang digunakan adalah data parameter sistem tenaga listrik 2 area Hadi Saadat seperti pada tabel 1 [3]. 2 2 2 1 D s H 1 1 2 1 D s H T s TT 1 1 1 1 TT 2s 1 1 1 1 g sT 1 2 1 g sT 2 1 R 1 1 R + + + + + + -- -1 reef P Preef2 1 Y Y2 2 Pm 1 Pm 1 L P PL2 tie P 1 f f2
Gambar. 1. LFC sistem tenaga listrik 2 area Keterangan,
H1 = Momen Inersia Area 1
H2 = Momen Inersia Area 2
D1 = Load Damping Area 1
D2 = Load Damping Area 2
TT1 = Konstanta Waktu Turbin Area 1
TT2 = Konstanta Waktu Turbin Area 2
Tg1 = Konstanta Waktu Governor Area 1
Tg2 = Konstanta Waktu Governor Area 2
R1 = Speed Drop Area 1
R2 = Speed Drop Area 2
T = Konstanta Sinkronisasi Antar Area Δf1 = Perubahan Frekuensi Area 1
Δf2 = Perubahan Frekuensi Area 2
ΔPG1 = Perubahan Level Kutub Area 1
ΔPG2 = Perubahan Level Kutub Area 2
ΔPM1 = Perubahan Daya Mekanik Area 1
ΔPM2 = Perubahan Daya Mekanik Area 2
ΔPtie = Perubahan Transfer Daya Antar Area
B. Thyristor Controlled Phase Shifter (TCPS)
Sistem tenaga modern banyak menggunakan peralatan Flexible AC Transmission System (FACTS). Keterbatasan
KOORDINASI KONTROLER PID DAN THYRISTOR
CONTROLLED PHASE SHIFTER (TCPS) PADA LOAD
FREQUENCY CONTROL (LFC) MENGGUNAKAN IMPERIALIST
COMPETITIVE ALGORITHM (ICA)
Candra Pradipta, Fakhruddin Arazzi, Herlambang Setiadi dan Imam Robandi
kontrol mekanis akan diatasi oleh FACTS. Keterbatasan mekanis tersebut dapat teratasi seiring dengan perkembangan elektronika daya. Sehingga performansi steady state dan dinamis dapat diperbaiki [4,5].
Kontrol aliran daya pada tie line dapat dilakukan dengan memasang seri TCPS dengan tie line pada sistem interkoneksi dua area, seperti pada gambar 2. Hal ini memungkinkan pengaturan sistem frekuensi pada sistem interkoneksi. Tujuan kontrol strategi ini akan sangat berguna untuk kestabilan dari osilasi frekuensi pada sistem intekoneksi [2].
Area 1 mempunyai aliran daya, yang dinyatakan dengan persamaan,
1 2
122
f
f
s
T
P
o o
(1)To adalah koefisien sinkron saluran tanpa TCPS dan f
1
dan f2 adalah deviasi frekuensi dari area 1 dan area 2.
Ketika TCPS ditempatkan secara seri dengan tie line seperti gambar 2. Di dapat persamaan daya saluran setelah dipasang TCPS.
1 2 12 2 1sin
X
V
V
P
tie (2) Sehingga,
1 2 1 2 12 2 1cos
o o o tieX
V
V
P
(3) Persamaan koefisien sinkronisasi antar area adalah,
o o o
X
V
V
T
1
2
12 2 1 12cos
(4)Sehingga diperoleh persamaan Ptie sebagai berikut,
12 2 1 12 12 2 1 12 12T
T
P
T
P
tie tie (5)Transformasi laplace dari persamaan (5) adalah
(
)
(
)
(
)
2
12 2 1 12 12F
s
F
s
T
s
s
T
P
tie
(6)Dari persamaan (6), aliran daya tie line dapat dikontrol dengan mengatur sudut phase shifter φ. Asumsi sinyal kontrol masukan dari TCPS adalah Error1(s) dan fungsi alih dari rangkaian keadaan sinyal adalah KC(s), dimana
K adalah gain dari kontroler TCPS. Oleh karena itu dapat direpresentasikan sebagai berikut,
)
(
1
)
(
Error
1s
sT
K
s
PS
(7)TPS adalah time constant dari TCPS dan Error1(s) adalah
sinyal kontrol dari TCPS. Dengan demikian dari persamaan (6) dapat ditulis sebagai berikut,
(
)
1
)
(
)
(
2
1 12 2 1 12 12Error
s
sT
K
T
s
F
s
F
s
T
P
PS tie
(8)Error1 dapat berupa sinyal deviasi frekuensi area 1 atau
area control error (ACE) dari area 1, sehingga pemodelan diagram blok TCPS seperti pada gambar 2.
∆φ PS K 1 T ∆F(s)
Gambar. 2. Diagram blok TCPS
C. Kontroler PID
Gangguan dapat menyebabkan error pada suatu sistem. Error ini dapat menyebabkan sifat sistem berubah. Perubahan sifat sistem dapat menyebabkan sistem tidak stabil. Membuat sistem kembali stabil dapat dilakukan melalui penambahan kontroler. Fungsi kontroler ialah mereduksi sinyal error, yaitu perbedaan antara sinyal setting dan sinyal aktual. Reaksi yang cepat pada sistem yang mengikuti sinyal aktual, maka kesalahan yang dihasilkan semakin kecil dan kinerjanya semakin baik.
Area 1 Area 2
tie
X
TCPS
Gambar. 3. TCPS pada interkoneksi 2 area Tabel1. Parameter sistem LFC 2 area
Area 1 2
Speed Drop ( R ) 0.05 0.0625
Damping Constant (D) 0.6 0.9
Inertia Constant (H) 5 4
Base Power (MVA) 1000 1000
Governor Time Constant (Tg) 0.2 0.3
Kontroler proporsional integral differensial (PID) sampai saat ini banyak digemari kalangan praktisi industri. Hal ini dikarenakan penggunaan yang mudah, dan dapat meningkatkan performansi dari sistem secara cepat [1,6].
Input kontroler PID adalah sinyal error. Sinyal error diolah dengan menjumlahkan kontroler proporsional, integral, dan diferensial seperti pada gambar 4.
+ -input Output p i 1 K e t d t T E(s) p d d e t K T d t + p K + + Umpan balik
Gambar. 4. Kontroler PID
D. Imperialist Competitive Algorithm (ICA)
Imperialist competitive algorithm (ICA) adalah algoritma yang terinspirasi dari kompetisi imperialis. Dari gambaran tersebut, optimasi adalah sebuah proses yang terus berkembang untuk sesuatu yang lebih baik [7]. Mempunyai f (x) dalam optimasi, kita menginginkan bahwa x adalah biaya yang relevan dalam optimasi. Keputusan dalam pemerintahan untuk menyambungkan kekuatan aturan dalam satu kesatuan disebut Imperialisme.
Dalam pencarian nilai yang optimal, ICA menggunakan sejumlah nilai variabel yang tersusun untuk dioptimasi. Susunan ini disebut “country” dalam Nvar-dimensional. Setiap country mempunyai 1x Nvar array. Sehingga dapat didefinisikan
country = [p1,p2,p3,...PNvar] (9)
Biaya dari country yang telah ditemukan akan dievalusai oleh fungsi biaya f pada variabel (p1,p2,p3,...PNvar) lalu
cost = f (country) = f (p1,p2,p3,...PNvar) (10) kekuatan total dari empire diakibatkan oleh kekuatan negara imperialis. Tetapi kekuatan dari koloni sebuah empire mempunyai efek dari kekuatan total dari empire. Dimodelkan dalam biaya total
T C n = Cost imperialistn +ξ mean Cost colonies of empiren
(11) Dimana model tersebut adalah total kekuatan dari nth empire sebagai bilangan positif yang dapat didefinisikan kurang dari 1. Sebuah nilai untuk ξ disebabkan oleh kekuatan total empire untuk didefinisikan oleh imperialis dan peningkatan nilai akan meningkatkan pola dari koloni yang telah ditentukan.
Empire yang kurang mempunyai kekuasaan akan hancur dalam kompetisi imperialis dan koloni mereka akan dibagi dalam beberapa empire. Dalam hampir semua implementasi, dapat mengeliminasi empire ketika kehilangan semua koloni.
III. KOORDINASIKONTROLERPID DAN TCPS MENGGUNAKANICA
Pada paper ini, akan dibahas koordinasi kontroller PID dan TCPS pada sistem tenaga listrik dua area menggunakan ICA. Pemodelan LFC dua area, kontroler PID dan TCPS menggunakan simulink pada MATLAB. Sedangkan program dari ICA menggunakan M-File. Permasalahan yang akan dioptimisasi ditentukan terlebih dahulu. Dalam paper ini permasalahan yang akan dioptimisasi ada 4, yaitu KP,Ki,Kd,K. Nilai-nilai KP, KI, KD dan K diasumsikan
sebagai dimensi dalam ICA yang akan menjadi koordinat lokasi vektor pada populasi ICA.
t dt t ACE t ITAE 0 ) ( (12)Simulasi dilakukan dengan 50 kali iterasi. Gambar 5 merupakan grafik konvergensi yang didapat dari simulasi.
HASIL SIMULASI DAN ANALISIS
Simulasi dalam paper ini digunakan untuk mencari koordinasi parameter kontroler PID dan Thyristor Phase Shifter (TCPS) dengan menggunakan Imperialist Competitive Algorithm (ICA). Kontroler digunakan untuk Load Frequency Control (LFC) pada sistem tenaga listrik dua area. Sistem tenaga listrik dua area yang digunakan adalah LFC dua area model Hadi Saadat.
Gambar. 5. Grafik konvergensi ICA
Gambar. 6. Respon perubahan frekuensi area 1 (Δf1) dengan
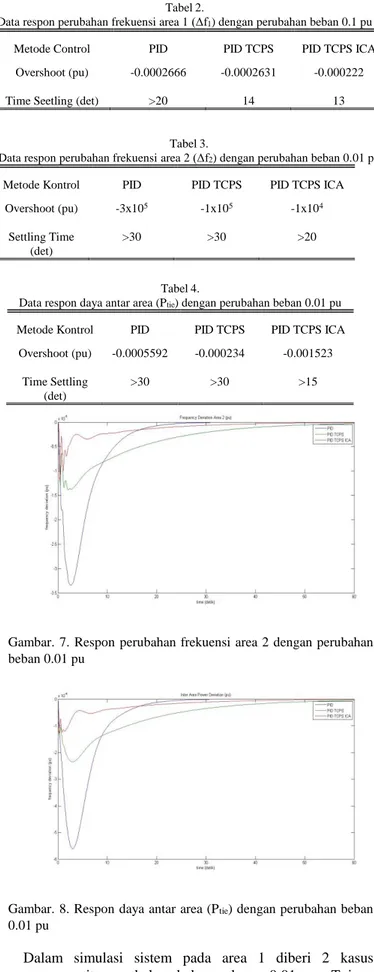
Gambar. 7. Respon perubahan frekuensi area 2 dengan perubahan beban 0.01 pu
Gambar. 8. Respon daya antar area (Ptie) dengan perubahan beban
0.01 pu
Dalam simulasi sistem pada area 1 diberi 2 kasus gangguan yaitu perubahan beban sebesar 0.01 p.u. Tujuan simulasi adalah menganalisa respon sistem. Respon sistem yang dianalisa adalah overshoot dan settling time perubahan frekuensi area 1 (Δf1), perubahan frekuensi area 2 (Δf2) dan
daya antar area (Ptie). Respon sistem dengan PID dan TCPS
yang telah dioptimisasi menggunakan ICA dibandingkan
dengan sistem dengan PID dan sistem dengan PID dan TCPS.
Sistem pada area 1 diberi gangguan perubahan beban sebesar 0.01 p.u. Terjadi perubahan beban pada area 1 akan mengakibatkan sistem pada area 2 juga terganggu, hal ini dikarenakan semua area saling terinterkoneksi menjadi satu. Selain itu daya antar area juga mengalami osilasi akibat dari perubahan beban.
Gambar 6 merupakan respon frekuensi area 1 (Δf1).
Dapat dilihat pada gambar 6 bahwa sistem dengan kontroler PID memiliki overshoot sebesar -0.0002666 pu dan settling time sebesar >20 detik. Kemudian setelah dipasang PID dan TCPS, overshoot berkurang menjadi -0.0002631 pu sedangkan settling time menjadi 14 detik. Dengan optimasi menggunakan ICA didapatkan hasil respon yang paling baik dibandingkan kontroler yang lain, untuk overshoot mencapai -0.000222 pu dan settling time mencapai 13 detik. Perbandingan overshoot dan settling time respon frekuensi area 1 dapat dilihat pada Tabel 2.
Respon frekuensi area 2 (Δf2) ditunjukkan pada Gambar
7. Dapat dilihat bahwa sistem dengan kontroler PID memiliki overshoot sebesar -3x105 pu dan settling time >30
detik. Kemudian setelah dipasang PID dan TCPS, overshootnya berkurang menjadi -1x105 pu sedangkan
settling time menjadi >30. Dengan optimisasi menggunakan ICA didapatkan hasil respon yang paling baik dibandingkan kontroler yang lain, untuk overshoot mencapai -1x104 pu
dan settling time mencapai 20 Untuk lebih jelasnya, overshoot dan settling time respon frekuensi area 2 dapat dilihat pada Tabel 3.
Daya antar area (Ptie). ditunjukkan pada Gambar 8. Dari
Gambar 8 dapat dilihat bahwa sistem dengan kontroler PID memiliki overshoot sebesar -0.0005592 pu dan settling time sebesar >30 detik. Kemudian setelah dipasang PID dan TCPS, overshoot berkurang menjadi -0.000234 pu sedangkan settling time menjadi >30 detik. Dengan optimisasi menggunakan ICA didapatkan hasil respon yang paling baik dibandingkan kontroler yang lain, untuk overshoot mencapai -0.0001523 pu dan settling time mencapai >15 detik. Untuk lebih jelas, overshoot dan settling time daya antar area (Ptie) dapat dilihat pada Tabel 4. Dari hasil simulasi diketahui bahwa sistem yang menggunakan kontroler PID dan TCPS memiliki respon overshoot yang lebih baik tetapi memiliki settling time yang sama. Hal ini menunjukan bahwa dengan menambahkan TCPS dapat mengurangi overshoot pada deviasi frekuensi kedua area dan respon daya antar area. TCPS yang dioptimisasi dengan ICA memilki respon overshoot yang paling baik. Hal ini menunjukkan bahwa, dengan menggunakan ICA didapatkan koordinasi parameter PID dan TCPS yang optimal sehingga mampu meredam osilasi sistem yang lebih baik dibandingkan kontroler yang lain.
IV. KESIMPULAN
Dari hasil simulasi didapatkan beberapa kesimpulan sebagai berikut,
1. Koordinasi parameter PID dan TCPS yang optimal dapat menggunakan metode ICA
2. Penerapan ICA terhadap PID dan TCPS pada sistem tenaga listrik dua area dapat memperkecil Tabel2.
Data respon perubahan frekuensi area 1 (Δf1) dengan perubahan beban 0.1 pu
Metode Control PID PID TCPS PID TCPS ICA
Overshoot (pu) Time Seetling (det)
-0.0002666 >20 -0.0002631 14 -0.000222 13 Tabel3.
Data respon perubahan frekuensi area 2 (Δf2) dengan perubahan beban 0.01 pu
Metode Kontrol PID PID TCPS PID TCPS ICA Overshoot (pu) -3x105 -1x105 -1x104
Settling Time (det)
>30 >30 >20
Tabel4.
Data respon daya antar area (Ptie) dengan perubahan beban 0.01 pu
Metode Kontrol PID PID TCPS PID TCPS ICA Overshoot (pu) Time Settling (det) -0.0005592 >30 -0.000234 >30 -0.001523 >15
overshoot dan mempercepat settling time respon sistem [1] [2] [3] [4] 006. DAFTARPUSTAKA
[1] Imam Robandi,”Modern Power System Control”, Penerbit ANDI, Yogyakarta,2009.
[2] R.J. Abraham, D. Das, A. Patra, “Effect of TCPS on oscillation in tie-power and frequencies in an interconected hydrothermal power system”, EIT Gener. Transm., Vol. 1, No. 4, Jully 2007.
[3] Hadi Saadat,"Power System Analysis",Mc Graw Hill, Singapore, 2004.
[4] Gyugyi, L., “Dynamic compensation of ac transmission line by solid-state synchronous voltage sources”, IEEE Trans. PD., Vol. 9, No.2 pp. 1994, 904-911
[5] M. A. Abido, " Thyristor Controlle Phase Shiter Based Stabilizer Design Using Simulated Annealing Algorithm", IEEE, 2009. [6] G. Jeyakumar and C. Shunmuga Velayutham, “A Comparative
Performance Analysis of Differential Evolution and Dynamic Differential Evolution Variants”, IEEE ,2009.
[7] R. L. Haupt and S. E. Haupt, Practical Genetic Algorithms, Second Edition, New Jersey: John Wiley & Sons, 2004