KOORDINASI FUZZY PID - AVR OPTIMAL MENGGUNAKAN HARMONY
SEARCH ALGORITHM UNTUK MEREDAM OSILASI TEGANGAN PADA
SISTEM TENAGA LISTRIK
Khaerul Humam1, Dr. Ir. Ermanu A.H., MT2, Ir. Nurhadi, MT3
Fakultas Teknik, Jurusan Teknik Elektro, Universitas Muhammadiyah Malang [email protected], [email protected]2, [email protected]3
Abstrak
Pada makalah ini nantinya akan membahas tentang mengoptimalkan AVR yang dikoordinasikan dengan Fuzzy PID untuk meredam osilasi tegangan. Dalam sistem tenaga listrik, perubahan beban sangat mempengaruhi kondisi operasi sistem. Perubahan beban pada sistem tenaga listrik dapat disebut sebagai gangguan kecil yang dapat mempengaruhi kestabilan sistem. Perbaikan kestabilan ini dapat dilakukan pemasangan kontroller Fuzzy PID yang sesuai penalaannya. Model sistem yang digunakan pada tugas akhir ini yaitu Single Machine Infinte Bus (SMIB).Penentuan parameter yang baik untuk Fuzzy PID juga mempengaruhi kestabilan sistem SMIB, sehingga perolehan parameter yang sesuai untuk Fuzzy PID ini ditala menggunakan metode Harmony Search Algorithm (HSA). Dalam penalaan menggunakan HSA terdapat fungsi objektif yaitu Integral of Time Multiplied by Absolute Value of Error (ITAE) yang berfungsi sebagai pencari nada terbaik. Hasil simulasi dalam penggunaan Fuzzy PID yang ditala dengan HSA 50 iterasi menunjukkan bahwa respon kestabilan sistem menjadi lebih baik. Hal ini dapat dilihat dari respon sistem untuk nilai rise time lebih rendah sebesar 2.2473e-004 detik dibandingkan Fuzzy PID sebelum ditala menggunakan HSA yaitu sebesar 0.0018 detik. Ini menunjukkan bahwa respon kestabilan sistem menjadi lebih baik. Ketika gangguan step time di ubah menjadi 17 detik, nilai pada rise
time, settling time dan error menjadi lebih besar.
Kata kunci : AVR, Fuzzy Logic, Kontroler PID, SMIB, HSA dan ITAE
Abstract
This paper will discuss about AVR optimizing coordinated with Fuzzy PID to dampen the oscillation voltage. In power system, the load changes affect the operating system conditions. The load changes on the power system can be referred to as a small disturbance that can affect the stability of the system. The stability improvement can be the installation of an appropriate tuning Fuzzy PID controller. The system model used in this thesis is a Single Machine Infinite Bus (SMIB) .The determination of the good parameter for Fuzzy PID also affect the stability of SMIB system, so the acquisition of Fuzzy PID parameter are tuned using the Harmony Search Algorithm (HSA) method. When tuning with HSA the objective functions is Integral of Time Multiplied by Absolute Value of Error (ITAE) when that function as searching be more good tone. Simulation result in used Fuzzy PID tuning with HSA 50 iteration shows that stability system response be more good. The things can views from system response to rise time value more low is 2.2473e-004 second than Fuzzy PID before tuning used HSA is 0,0018 second. This shows that stability system response be more good. When the time step disturbance changed to 17 seconds, the value of the rise time, settling time and errors become larger.
PENDAHULUAN
Latar BelakangPada perencanaan dan operasi sistem tenaga listrik, kestabilan sistem adalah hal yang sangat penting. Pada sistem pengaturan modern, eksitasi memegang peranan penting dalam mengendalikan kestabilan suatu pembangkit karena apabila terjadi fluktuasi beban maka eksitasi sebagai pengendali akan berfungsi mengontrol keluaran generator seperti tegangan, dan factor daya dengan cara mengatur kembali besaran-besaran input guna mencapai titik keseimbangan baru. Bila arus eksitasi naik maka daya reaktif yang disalurkan generator ke sistem akan naik sebaliknya bila turun maka daya reaktif yang disalurkan akan berkurang. Jika arus eksitasi yang diberikan terlalu kecil, aliran daya reaktif akan berbalik dari sistem menuju ke generator sehingga generator menyerap daya reaktif dari sistem. Keadaan ini sangat berbahaya karena akan menyebabkan pemanasan berlebihan pada stator.
Suatu sistem tenaga listrik dikatakan dalam keadaan stabil apabila seluruh variabel keadaannya stabil, baik tegangan bus, sudut generator atau frekuensi sistem. Bila sistem menjadi tidak stabil, maka ketikstabilan tersebut bisa dimanifestasikan melalui cara-cara berbeda, tergantung pada sifat dari sistem, kondisi operasi serta pada sifat dan lokasi yang memulai gangguan. Ketidakstabilan sistem yang diwujudkan dalam bentuk tegangan di beberapa bus turun jauh dibawah kondisi normal dan memungkinkan terjadi gagal tegangan, maka peristiwa tersebut bisa dikatakan atau merupakan fenomena ketidakstabilan tegangan. Suatu sistem dikatakan dalam kondisi tegangan tidak stabil, bila terjadi perubahan pada sistem diluar perkiraan.
Oleh karena itu yang akan dibahas dalam tugas akhir ini nantinya tentang mengoptimalkan AVR (Automatic Voltage Regulator) dengan
koordinasi fuzzy PID untuk meredam osilasi tegangan pada sistem tenaga listrik. Didalam sistem tenaga listrik single machine, perubahan beban sangat mempengaruhi kondisi operasi sistem. Perubahan beban pada sistem tenaga listrik dapat disebut sebagai small disturbance (gangguan kecil) yang dapat mempengaruhi kestabilan sistem. Perbaikan kestabilan ini dapat dilakukan pemasangan kontroller Fuzzy PID yang sesuai penalaannya. Untuk penalaan fuzzy PID menggunakan metode HSA (Harmony Search Algorithm). Metode ini merupakan salah satu algoritma yang terinspirasi dari proses improvisasi musisi. Dalam HSA, setiap musisi (variabel keputusan), memainkan (menghasilkan), catatan (nilai) untuk menemukan semua harmoni terbaik secara bersama-sama.
Tujuan
1. Memodelkan Fuzzy PID-AVR yang optimal dan menerapkannya pada SMIB (Single Machine infinite Bus).
2. Menentukan parameter yang optimal untuk Fuzzy PID-AVR dengan menggunakan metode HSA( Harmony Search Algorithm)
3. Untuk mendapatkan performansi sistem setelah dipasangkan kontroler Fuzzy PID-AVR.
PERANCANGAN
Pemodelan Exciter
Gambar 1 Diagram blok sistem eksitasi Dengan mengabaikan efek saturasi, Gambar 2.1 dapat dijabarkan menjadi.
TA ∆VA = ∆U2 KA - ∆VA - ∆V KA (2-1) ∆VA = Perubahan tegangan amplifier mesin Model Linier Dinamika Mesin Sinkron
Suatu generator agar menghasilkan energi listrik, membutuhkan dua masukan, yang pertama torsi mekanik turbin (Tm). Torsi ini berfungsi untuk memutar rotor generator. Yang kedua fluks medan magnet (EFD) yang dihasilkan oleh rangkaian medan, melalui lilitas yang tedapat pada rotor. Dengan adanya torsi mekanik, rotor generator berputar
dengan dengan energy kinetic 1/2Jω2 joule. Momentum sudut M=Jω joule detik, dengan ω (radian per-detik) merupakan kecepatan sudut dan J adalah momen inersia (kg-m2).
Jika generator sinkron dibebani, akan mengalir arus dari generator ke beban. Selanjutnya arus ini menghasilkan fluks pada stator dan menimbulkan torsi elektrik (Te) melawan torsi mekanik. Persamaan torsi mekanik dan elektris dapat diturunkan sebagai berikut:
𝑇𝑚− 𝑇𝑒= 𝐽𝑑𝜔𝑑𝑡 + 𝑑𝜔 (2-2)
Sedangkan persamaan torsi dasarnya
𝑇𝑎 =𝜔𝑃𝑎𝑎; 𝜔𝑎= 𝜔𝑠 (2-3)
𝑇𝑚
𝑇𝑎−
𝑇𝑒
𝑇𝑎= 𝐽
𝜔𝑠
𝑇𝑎
𝑑𝜔 𝜔⁄ 𝑠
𝑑𝑡 + 𝜔𝑠
𝑇𝑎
𝜔
𝜔𝑠 (2-4)
𝑇𝑚− 𝑇𝑒= 𝑀𝑑𝜔𝑑𝑡 + 𝐷𝜔 (2-5)
Dimana:
D = koefisien redaman mesin Dengan
𝑀 = 𝐽𝑑𝑃2𝜔
𝑎 ; 𝐷 =
𝑑2𝜔 𝑠
𝑃𝑎 (2-6)
Setelah dilinierisasi,
∆𝑇𝑚− ∆𝑇𝑒 = 𝑀𝑑∆𝜔𝑑𝑡 + 𝐷∆𝜔 (2-7)
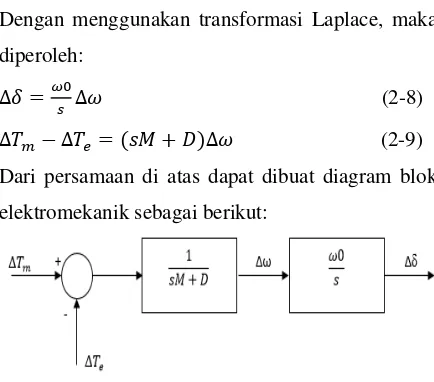
Dengan menggunakan transformasi Laplace, maka diperoleh:
∆𝛿 =𝜔0𝑠 ∆𝜔 (2-8) ∆𝑇𝑚− ∆𝑇𝑒 = (𝑠𝑀 + 𝐷)∆𝜔 (2-9)
Dari persamaan di atas dapat dibuat diagram blok elektromekanik sebagai berikut:
Gambar 2 Diagram blok elektromekanik
Pemodelan Konstanta K1 dan K2
Pada subbab ini konstanta K1 dan K2 berhubungan
dengan persamaan variabel torsi elektrik (∆Te).
Persamaan torsi elektrik dapat dituliskan sebagai berikut:
∆𝑇𝑒 = 𝐾1. ∆𝛿 + 𝐾2. 𝐸′𝑞 (2-10)
Dengan:
K1 = 𝐸𝑞𝑎0𝑉∞𝐾𝐼(𝑅𝑒sin(𝛿0− 𝛼) + (𝑋𝑒+
𝑋′
𝑑) cos (𝛿0− 𝛼)) + 𝐾𝐼𝑉∞𝐼𝑞0(𝑋𝑞− 𝑋′𝑑((𝑋𝑞+
𝑋𝑒) sin( 𝛿0− 𝛼) − 𝑅𝑒 cos (𝛿0− 𝛼)) (2-11)
Dengan: 𝐾𝐼 = 𝑅𝑒2+(𝑋 1
𝑞+𝑋𝑒)(𝑋′𝑑+𝑋𝑒) (2-12)
Sedangkan untuk K2 dapat didefinisikan sebagai berikut:
K2 = 𝐾𝐼𝐼𝑞𝑜[𝑅𝑒2(𝑋𝑞+ 𝑋𝑒)2] + 𝐾𝐼𝐸𝑞𝑎𝑜𝑅𝑒 (2-13)
Dari persamaan torsi elektrik dapat dimodelkan sesuai diagram blok pada gambar 2.3.
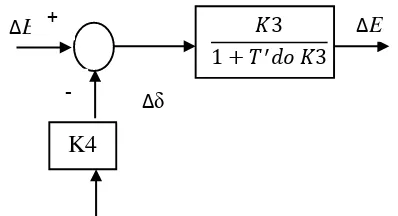
Pemodelan Konstanta K3 dan K4
Konstanta K3 dan K4 berhubungan dengan persamaan variabel tegangan ∆E’q. Dengan mengambil hubungan bahwa
∆𝐸𝐹𝐷 = (1 𝐾⁄ 3+ 𝜏′𝑑0𝑠)∆𝐸′𝑞+ 𝐾4∆𝛿 (2-14)
∆𝐸′𝑞=1+𝑠𝜏′𝐾3𝑑0𝐾3(∆𝐸𝐹𝐷− 𝐾4∆𝛿) (2-15)
dengan harga: 𝐾3 = 1+𝐾 1
𝐼(𝑋𝑞+𝑋𝑒)(𝑋𝑑−𝑋′𝑑) (2-16)
dan harga:
𝐾4 = 𝑉∞𝐾𝐼(𝑋𝑑− 𝑋′𝑑)⌊(𝑋𝑞+ 𝑋𝑒) sin( 𝛿0− 𝛼) −
𝑅𝑒 cos (𝛿0− 𝛼)⌋ (2-17)
Dari persamaan (2-14) sampai dengan (2-17) dapat dimodelkan sesuai diagram blok pada gambar 2.4.
Gambar 4 Diagram blok pembangkitan medan
Konstanta K5 dan K6
Untuk menghitung konstanta K5 dan K6 dibutuhkan
hubungan dengan variabel tegangan terminal ∆Vt yang dalam bentuk persamaan linier diberikan sebagai berikut:
∆Vt = K5∆ẟ+K6∆E’q (2-18) Dari persamaan (2-17), K5 adalah perubahan
tegangan terminal ∆Vt untuk perubahan kecil dari sudut rotor pada fluks sumbu d konstan, yang dapat ditulis sebagai berikut:
𝐾5 = 𝐾𝐼𝑉∞𝑋′𝑑𝑉𝑉𝑞0𝑡0[𝑅𝑒cos( 𝛿0− 𝛼) − (𝑋𝑞+
𝑋𝑒) sin (𝛿0− 𝛼)] − 𝐾𝐼𝑉∞𝑋𝑞𝑉𝑉𝑑0𝑡0[(𝑋′𝑑+
𝑋𝑒) cos( 𝛿0− 𝛼) + 𝑅𝑒 sin (𝛿0− 𝛼)] (2-19)
Sedangkan konstanta K6 adalah perubahan tegangan terminal Vt untuk perubahan kecil dari fluks sumbu
d pada sudut rotor konstan. Maka persamaannya dapat ditulis
𝐾6 =𝑉𝑞0
𝑉𝑡0[1 − 𝐾𝐼𝑋
′
𝑑(𝑋𝑞+ 𝑋𝑒)] −𝑉𝑉𝑑0𝑡0𝐾𝐼𝑋𝑞𝑅𝑒
……… (2-20) Sesuai dengan persamaan (2-17) maka tegangan terminal dapat dimodelkan kedalam diagram blok seperti pada gambar 3.5.
Gambar 5 Diagram blok tegangan terminal pada SMIB
Pemodelan Sistem SMIB
Pada pembahasan kali ini adalah gabungan dari yang telah dibahas dalam persamaan dari pemodelan eksiter sampai pemodelan konstanta K1-K6 dapat dibentuk dalam diagram blok secara keseluruhan, seperti pada gambar 2.9 berikut:
Gambar 6 Diagram blok model sistem SMIB
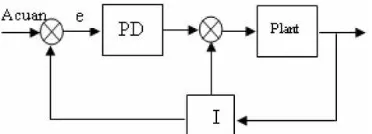
Model Kontroler fuzzy PI/PD minimum
Berikut akan diuraikan model matematika untuk perancangan kontroller fuzzy PID. Dalam perancangan ini digunakan akan digunakan konfigurasi standar kontroller PD+I karena mudah untuk diimplementasikan. Desain kontroller PID terdiri dari 2 bagian kontroller fuzzy PD dan kontroller fuzzy I.
𝐾3 1 + 𝑇′𝑑𝑜 𝐾3
K4
∆ẟ
∆E ∆E
Gambar 7 Diagram blok sistem Kontrol PD+I
Penentuan Kontroler Fuzzy PD
Prinsip matematika dari keluaran kontroler konvensional PD kontroler dalam kawasan frekuensi s dari sistem dengan diagram blok pada gambar 3.7 adalah
𝑢𝑃𝐷 = (𝐾𝑃𝑐+ 𝑠𝐾𝑑𝑐)𝐸(𝑠) (2-21)
dengan 𝐾𝑃𝑐 dan 𝐾𝑑𝑐 masing-masing adalah penguatan proporsional dan drivatif konvensional, dan E(s) adalah sinyal kesalahan penjejakan. Dengan melakukan transformasi diskrit dengan menerapkan transformasi bilinier
𝑠 =2𝑇[𝑧−1𝑧+1] (2-22)
dengan T adalah periode sampling, diperoleh
𝑢𝑃𝐷(𝑠) = (𝐾𝑃𝑐+ 𝐾𝑑𝑐 𝑇21−𝑧
−1
1+𝑧−1) 𝐸(𝑧) (2-23)
dengan membuat Kd = 𝐾𝑃𝑐 dan Kd = 2𝐾𝑑𝑐 / T dan kemudian melakukan melakukan transformasi z balik, kita dapatkan
𝑢𝑃𝐷(𝑛𝑇) + 𝑢𝑃𝐷(𝑛𝑇 − 𝑇) = 𝐾𝑝[𝑒(𝑛𝑇) + 𝑒(𝑛𝑇 −
𝑇)] + 𝐾𝑑[𝑒(𝑛𝑇) − 𝑒(𝑛𝑇 − 𝑇)] (2-24)
dengan membagi persamaan (2-24) dengan T, dan menggunakan n untuk maksud nT dan keadaan sekarang, kita peroleh
∆𝑢𝑃𝐷(𝑛) = 𝐾𝑃𝑑(𝑛) + 𝐾𝑑𝑟(𝑛) (2-25)
∆𝑢𝑃𝐷 =𝑢𝑃𝐷(𝑛)+𝑢𝑇𝑃𝐷(𝑛−1) (2-26)
𝑟(𝑛) =𝑒(𝑛)−𝑒(𝑛−1)𝑇 (2-27)
𝑑(𝑛) =𝑒(𝑛)+𝑒(𝑛−1)𝑇 (2-28)
persamaan (2-24) dapat ditulis kembali sebagai berikut:
𝑢𝑃𝐷(𝑛) = −𝑢𝑃𝐷(𝑛 − 1) + 𝑇∆𝑢𝑃𝐷(𝑛) (2-29)
dengan mengganti suku 𝑇∆𝑢𝑃𝐷(𝑛) dengan penguatan aksi kontrol fuzzy didapatkan
𝑢𝑃𝐷(𝑛) = −𝑢𝑃𝐷(𝑛 − 1) + 𝐾𝑈𝑃𝐷∆𝑢𝑃𝐷(𝑛) (2-30)
dengan 𝐾𝑈𝑃𝐷 penguatan kontrol.
Penentuan Kontroler Fuzzy I
Kontroler I dalam sistem control PD+I seperti ditunjukan pada gambar 3.7, memiliki e sebagai masukan dan 𝑢𝐼 sebagai keluaran. Dalam kawasan frekuensi s hubungan masukan keluaran diuraikan dalam bentuk persamaan berikut:
𝑢𝐼(𝑠) =𝐾𝑖
𝑒
𝑠 𝐸(𝑠) (2-31)
dengan 𝐾𝑖𝑒 adalah penguatan kontrol integral konvensional dan E(s) adalah sinyal kesalahan. Dengan menggunakan transformasi bilinier yang sama terhadap persamaan (2-31) diperoleh
𝑢𝐼(𝑧) =𝑇21−𝑧
−1
1−𝑧−1𝐾𝑖𝑒𝐸(𝑧) (2-32)
sehingga:
𝑢𝐼(𝑧) = 𝐾𝑖𝑒 𝑇2(1 + 2𝑧
−1
1−𝑧−1) 𝐸(𝑧) (2-33)
𝑢𝐼(𝑛) − 𝑢𝐼(𝑛 − 1) =𝐾𝑖
𝑒𝑇
2 [𝑒(𝑛) − 𝑒(𝑛 − 1)] +
𝐾𝑖𝑒𝑇𝑒(𝑛 − 1) (2-34)
dengan membagi persamaan (2-34) dengan T diperoleh
∆𝑢𝐼(𝑛) = 𝐾𝐼𝑒(𝑛 − 1) + 𝐾𝑟(𝑛) (2-35)
dengan Ki = 𝐾𝑖𝑒 dan K = (T / 2) 𝐾𝑖𝑒, dan
∆𝑢𝐼(𝑛) =𝑢𝐼(𝑛)−𝑢𝑇𝐼(𝑛−1) (2-36)
𝑟(𝑛) =𝑒(𝑛) − 𝑒(𝑛 − 1)𝑇
dengan membuat 𝐾𝑢𝐼 sebagai penguatan control
fuzzy, sebagaimana pada kontroler fuzzy PD seperti diuraikan diatas, maka didapatkan
𝑢𝐼(𝑛) = 𝑢𝐼(𝑛 − 1) + 𝐾𝑢𝐼∆𝑢𝐼(𝑛) (2-37) Kombinasi Kontroller Fuzzy PD+I
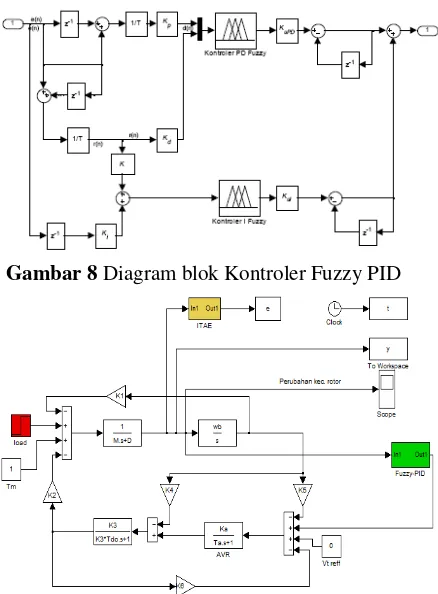
Kontroler fuzzy PD+I keseluruhan diperoleh menggunakan penjumlahan aljabar maka
𝑢𝑃𝐼𝐷(𝑛) = 𝑢𝑃𝐷(𝑛) + 𝑢𝐼(𝑛)
= −𝑢𝑃𝐷(𝑛 − 1) + 𝐾𝑈𝑃𝐷∆𝑢𝑃𝐷(𝑛) +
Gambar 8 Diagram blok Kontroler Fuzzy PID
Gambar 9 Diagram blok SMIB dengan kontroler Fuzzy PID
Penggunaan HSA (Harmony Search Algorithm)
Dalam Penalaan Fuzzy PID
Penerapan HSA disini digunakan untuk menala parameter PID. Hasil dari penalaan ini kemudian dianalisis untuk mendapatkan respon yang baik. Parameter HSA yang digunakan dalam metode ini secara lengkap ditunjukkan pada tabel 1.
Tabel 1 Parameter HSA
Parameter Nilai
Iterasi Maksimum 50
HMCR 0.9
HMS 150
PAR max 0.9
PAR min 0.3
BW max (bandwitch maksimum) 0.5 BW min (bandwitch minimum) 0.2
Kondisi sistem yang dibandingkan adalah sistem tanpa fuzzy PID dengan sistem menggunakan fuzzy PID. Respon yang diamati adalah respon
perubahan kecepatan rotor. Dari respon tersebut akan dianalisis tentang penerapan fuzzy PID dan penggunaan metode optimasi untuk memperbaiki nilai
overshoot dan settling time. Pengujian untuk mengetahui keefektifan dari metode yang diusulkan
yaitu dengan memberikan sinyal uji berupa perubahan
pada sistem sebesar 10% dari kapasistas generator.
Alur diagram mengenai prosedur komputasi dari
metode yang diusulkan untuk mencari nilai parameter
PID menggunakan HSA dapat dilihat pada flowchar
pada gambar 2.13
N
N
Gambar 10 Flowchart HSA
Improvisasi vector baru
HM
Apakah nilai fungsi vektor baru lebih
baik dari vektor terburuk di HM
Memasukan vektor baru dan membuang vektorterburukdari HM
Menghentikan kriteria
Selesai Inisialisasi Parameter
START
HASIL DAN PEMBAHASAN
Simulasi ini membandingkan hasil redaman antara SMIB tanpa kontroler dan SMIB dengan kontroler fuzzy PID yang parameternya ditala menggunakan HSA. Pengolahan data dan simulasi dikerjakan dengan menggunakan software MATLAB 7.10 (R2010a). Respon yang diamati dalam simulasi ini adalah respon perubahan kecepatan rotor.
Data SMIB
Dalam tugas akhir ini data saluran dan parameter mesin di ambil dari data sheet PLTMH UMM. Data saluran dan parameter mesin ditunjukkan pada tabel 2 dan tabel 3
Tabel 2 Parameter Generator PLTMH UMM (UCI274F)
No. Parameter Nilai
1 Rating Daya (kVA) 160 2 Power Faktor 0.8 3 Frekuensi (Hz) 50
4 Speed(RPM) 1500
5 H 4 s
6 Tdo’ 0.9 s
7 Xd (pu) 2.24 8 Xd’ (pu) 0.19
9 Xq (pu) 1.38
Tabel 3 Sistem Exitasi Type (SX460)
No Parameter Nilai
1 Ka 1
2 Ta 0.009
Tabel 4 Saluran Transmisi
No Parameter Nilai
1 X 0.156
2 R 0.176
Hasil Simulasi dan Analisis
Saat melakukan simulasi pada MATLAB, model simulink yang digunakan adalah gambar 9 Disana terdapat load sebagai perubahan gangguan
beban sebesar 0.1 pu, Fuzzy PID sebagai kontroller yang akan dioptimalkan nilai parameternya menggunakan HSA, dan scope berfungsi untuk menampilkan respon dari simulasi. Setiap simulasi diamati dalam waktu 10 detik. Respon yang diamati adalah respon perubahan kecepatan rotor.
Hasil Perhitungan
Hasil perhitungan parameter di atas digunakan sebagai inisialisasi dari model sistem tenaga listrik SMIB yang ditunjukkan pada tabel 2 sampai tabel 3.
Tabel 5 Kondisi Inisial Sistem PLTMH UMM
No. Parameter Nilai
1 Id -1.1820
2 Iq 0.4067
3 Vd -0.5613
4 Vq 0.8276
5 Vt 1
6 Eqao 2.4588
7 V 0.8050
8 Sin ( 0- ) 0.7596
9 Cos ( 0- ) 0.6504
Hasil perhitungan parameter interkoneksi dari K1 sampai K6 dengan program MATLAB dapat dilihat pada tabel 6
Tabel 6 Parameter K1-K6
No. Parameter Nilai
1 K1 1.8973
2 K2 2.3208
3 K3 0.1569
4 K4 2.2595
5 K5 0.1440
0 2 4 6 8 10 12 14 16 18 20
kontroller fuzzy PID non HSA
0 5 10 15 20 25 30
SMIB tanpa Kontroler fuzzy PID
Gambar 11 Respon perubahan kecepatan rotor sistem SMIB tanpa Kontroler
Pada gambar 11 merupakan hasil respon dari simulasi SMIB tanpa menggunakan kontroler fuzzy PID. Dengan diberikan gangguan sebesar 0.1 pu dan step time sebesar 1 detik. Dari hasil tersebut dapat diketahui, nilai rise time sebesar 0.0018 detik dan nilai sattling time sebesar 14.5511detik , dan nilai error sebesar 1.0440. Hasil respon dapat dilihat pada gambar 11 mengalami peredaman lebih lambat untuk menuju ke posisi normal.
SMIB dengan Kontroler Fuzzy PID Tanpa
HSA
Gambar 12 Respon perubahan kecepatan rotor sistem SMIB dengan menggunakan kontroler Fuzzy PID tanpa HSA
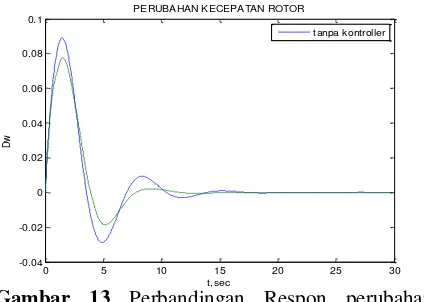
Gambar 13 Perbandingan Respon perubahan kecepatan rotor sistem SMIB tanpa kontroler terhadap SMIB dengan kontroler Fuzzy PID tanpa HSA
Pada gambar 12 respon perubahan kecepatan rotor pada SMIB yang menggunakan kontroler fuzzy PID tanpa HSA. Dengan diberikannya gangguan sebesar 0.1 pu dan step time sebesar 1 detik. Maka rise time yang didapatkan sebesar 4.6658e-003, settling time sebesar 11.6631 dan error sebesar 0.6444. Dari gambar 13 peredaman yang dialami lebih cepat dari gambar 11 yang menggunakan tanpa kontroller. Berikut gambar perbandingan antara sistem SMIB tanpa kontroler terhadap sistem SMIB menggunakan kontroler.
Gambar 14 Respon perubahan kecepatan rotor sistem SMIB dengan menggunakan kontroler Fuzzy PID tanpa HSA setelah mengubah gangguan step time sebesar 17 detik
0 5 10 15 20 25 30
Grafik Konvergensi Fuzzy PID dengan HSA
Iterasi
detik. Maka rise time sebesar 0.0018 detik, settling time sebesar 22.7262 detik dan error sebesar 0.9684. Dari gambar 14 terlihat respon perubahan kecepatan rotor mengalami peredaman setelah gangguannya diubah.
SMIB dengan Kontroler Fuzzy PID-HSA
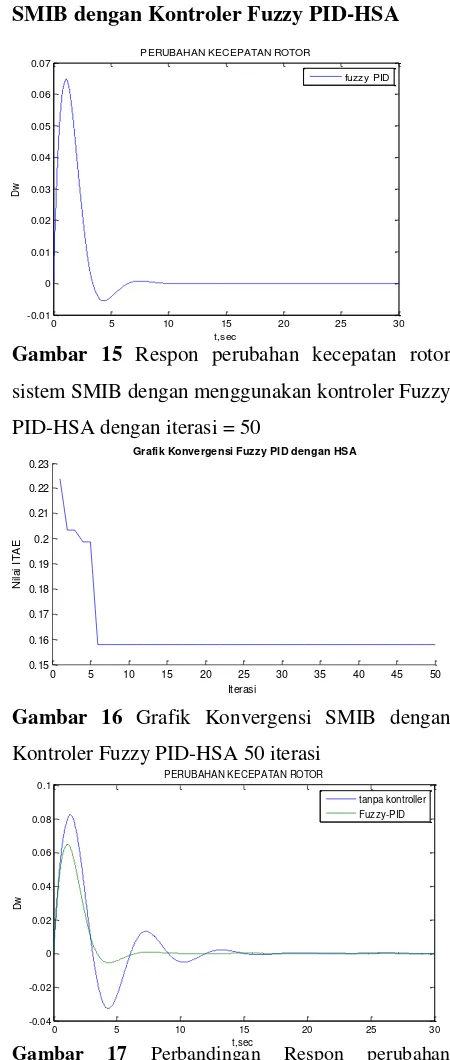
Gambar 15 Respon perubahan kecepatan rotor sistem SMIB dengan menggunakan kontroler Fuzzy PID-HSA dengan iterasi = 50
Gambar 16 Grafik Konvergensi SMIB dengan Kontroler Fuzzy PID-HSA 50 iterasi
Gambar 17 Perbandingan Respon perubahan
kecepatan rotor sistem SMIB tanpa kontroler terhadap
SMIB dengan kontroler Fuzzy PID-HSA dengan iterasi
= 50
Pada gambar 15 dapat dilihat hasil respon dari simulasi SMIB dengan menggunakan kontroler Fuzzy PID-HSA. Ketika diberikan gangguan sebesar 0.1 pu dan diberikan step time sebesar 1 detik. Hasil dari simulasi yang telah dilakukan dapat diketahui nilai settling time sebesar 5.9724 detik, nilair rise time sebesar 2.2473e-004 detik dan nilai error sebesar 0.1564. Hasil respon dapat dilihat pada gambar 15 mengalami peredaman lebih cepat untuk menuju ke posisi normal.
Pada gambar 16 merupakan grafik konvergensi dari optimasi Fuzzy PID dengan HSA. Dilihat dari grafik konvergensi dapat diketahui nilai ITAE yang menjadi fungsi objektif dalam pencarian nilai parameter Fuzzy PID yang paling optimal. Nilai ITAE sudah mengalami konvergensi pada iterasi ke 2 sampai iterasi ke 6 dan konstan sampai iterasi ke 50 sehingga mendapatkan nilai ITAE yang paling optimal sebesar 0.1564.
Gambar 18 Respon perubahan kecepatan rotor sistem SMIB dengan menggunakan kontroler Fuzzy PID-HSA dengan iterasi = 50 setelah mengubah gangguan step time sebesar 17 detik
0 5 10 15 20 25 30
Grafik Konvergensi Fuzzy PID dengan HSA
Iterasi
gangguannya diubah. Namun rise time, settling time dan error menjadi lebih besar.
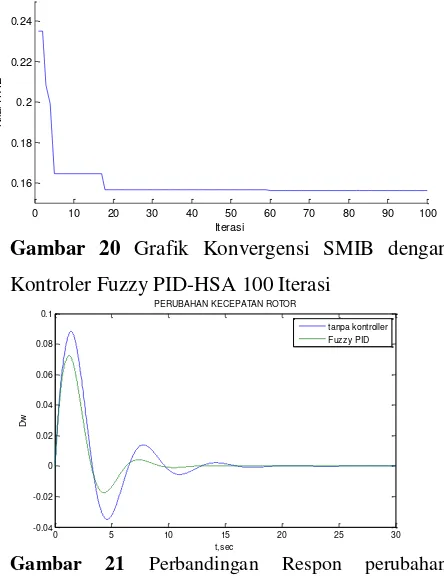
Gambar 19 Respon perubahan kecepatan rotor sistem SMIB dengan menggunakan kontroler Fuzzy PID-HSA dengan iterasi = 100
Gambar 20 Grafik Konvergensi SMIB dengan Kontroler Fuzzy PID-HSA 100 Iterasi
Gambar 21 Perbandingan Respon perubahan
kecepatan rotor sistem SMIB tanpa kontroler terhadap
SMIB dengan kontroller Fuzzy PID-HSA dengan
iterasi = 100
Pada gambar 19 dengan 100 iterasi dapat dilihat hasil respon dari simulasi SMIB menggunakan kontroler fuzzy PID-HSA. Dengan diberikan gangguan dan step time yang sama dengan simulasi SMIB yang menggunakan kontroller fuzzy PID-HSA dengan 50 iterasi. Dari hasil simulasi
dapat diketahui rise time sebesar 9.4411e-005, settling time sebesar 8.3894 dan error sebsar 0.1587.Hasil respon dari simulasi tersebut adalah peredamannya terlihat lebih lambat dari pada yang menggunakan 50 iterasi.
Pada gambar 20 merupakan grafik konvergensi dari optimasi Fuzzy PID dengan HSA. Dilihat dari grafik konvergensi dapat diketahui nilai ITAE yang menjadi fungsi objektif dalam pencarian nilai parameter Fuzzy PID yang paling optimal. Nilai ITAE sudah mengalami konvergensi pada iterasi ke 5 sampai iterasi ke 19 dan konstan sampai iterasi ke 100 sehingga mendapatkan nilai ITAE yang paling optimal sebesar 0.1587
Gambar 22 Respon perubahan kecepatan rotor sistem SMIB dengan menggunakan kontroler Fuzzy PID-HSA dengan iterasi = 100 setelah mengubah gangguan step time sebesar 17 detik
Hasil dari parameter yang di optimalkan dengan HSA ditampilkan pada tabel berikut: Tabel 7 Parameter Fuzzy PID Hasil Optimasi Menggunakan HSA dan tanpa HSA
No Parameter
Tabel 8 Data Respon Perubahan Kecepatan Rotor
Metode
14.5511 11.6631 5.9724 8.3894
Error
ITAE 1.0440 0.6444 0.1564 0.1587
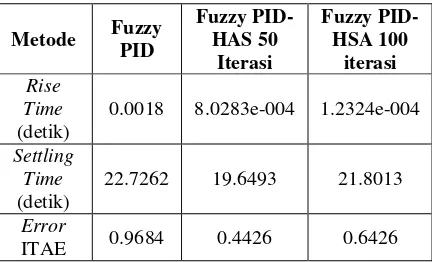
Tabel 9 Data Respon Perubahan Kecepatan Rotor dengan gangguan 17 detik
Metode Fuzzy
0.0018 8.0283e-004 1.2324e-004
Settling Time
(detik)
22.7262 19.6493 21.8013
Error
ITAE 0.9684 0.4426 0.6426
Jika dibandingkan antara hasil simulasi SMIB tanpa kontroler dengan hasil simulasi SMIB menggunakan kontroler fuzzy PID, fuzzy PID-HSA 50 iterasi dan fuzzy PID-HSA 100 iterasi. Hasil simulasi SMIB menggunakan kontroler Fuzzy PID-HSA dengan 50
iterasi terlihat lebih baik karena nilai settling time dan nilai error ITAE lebih kecil kecuali pada kontroler Fuzzy PID-HSA dengan 100 iterasi yang mana rise time lebih kecil dari sistem SMIB tanpa kontroler, SMIB dengan kontroler fuzzy PID dan kontroler fuzzy PID-HSA 50 iterasi. Terlihat dari gambar 17 respon perubahan kecepatan rotor terlihat lebih bagus dan peredaman lebih cepat. Ketika gangguan step time diubah menjadi 17 detik, nilai rise time, settling time dan error menjadi lebih besar disbanding sebelum gangguan diubah.
KESIMPULAN DAN SARAN
Kesimpulan
Berdasarkan hasil simulasi analisa dapat disimpulkan sebagai berikut:
1. Perancangan fuzzy PID-AVR optimal menunjukkan hasil peredaman yang efektif dan optimal. Pada gambar 17 terlihat respon perubahan kecepatan rotor lebih cepat peredamannya memakai kontroler fuzzy PID yang parameternya ditala menggunakan HSA (Harmony Search Algorithm) dengan 50 iterasi dibanding dengan tanpa kontroler dan menggunakan kontroler fuzzy PID non HSA dan kontroller fuzzy PID-HSA.
3. Ketika gangguan step time di ubah menjadi 17 detik, nilai pada rise time, settling time dan error menjadi lebih besar.
Saran
Untuk lebih meningkatkan ketelitian model dan simulasi sistem tenaga listrik SMIB, beban sebaiknya tidak dianggap statis tetapi beban dinamis. Pada penelitian selanjutnya disarankan untuk menambahkan teknik-teknik yang dapat memberikan kestabilan hasil dalam setiap iterasi dan memperkuat nilai initial solution HSA dengan mempertimbangkan tingkat kemampuan komputer. Penalaan parameter Fuzzy PID dapat dilakukan dengan metode optimasi yang lain dan pengujian dapat dikembangkan menggunakan model sistem multimesin dan dapat dipadukan dengan PSS.
DAFTAR PUSTAKA
[1] A. Hakim, Ermanu. Heri P., Mauridhi. Suprijanto, Adi. PSS Berbasis pada Fuzzy PID Optimal untuk Stabilitas Sistem Tenaga Listrik. ITS, Surabaya, 2006.
[2] Ching-Chang Wong, Shih-An Li and Hou-Yi Wang. 2009. "Optimal PID Controller Desain For AVR System". Tamkang Jurnal of Science and Engineering, Vol. 12, No. 3, pp. 259-270 [3] Geem, Z.W. Music-Inspired Harmony Search
Algorithm. Springer, Verlag, Berlin, Heidelberg. 2009.
[4] Geem, Z.W. Recent Advances in Harmony Search Algorithm. Springer, Verlag, Berlin, Heidelberg. 2010.
[5] Kundur, Prabha. Power System Stability and Control. New York: McGraw-Hill, Inc. 1993.
[6] Kusumadewi, Sri. Purnomo, Hari. Aplikasi Logika Fuzzy untuk Pendukung Keputusan. Penerbit Garaha Ilmu, Yogyakarta, 2010.
[7] Mahdevi, M., Fesanghary, M., dan Damangir, E. An Improved Harmony Search Algorithm for Solving Optimization Problems. Applied Mathematics and Computation, Vol. 188 (2007), pp. 1567-1579.
[8] Robandi, Imam."Desain Sistem Tenaga Modern Optimasi, Logika Fuzzy, dan Algoritma Genetika". Penerbit C.V ANDI OFFSET, Yogyakarta, 2006.
[9] Robandi, Imam. Modern Power System Control. Penerbit Andi Yogyakarta, 2009.
[10]Suprijanto, Andi. "Desain Kontroller Untuk Kestabilan Dinamik Sistem Tenaga Listrik". Penerbit ITS Press, Surabaya, 2012