BAB III
PEMODELAN DISPERSI
POLUTAN
Salah satu faktor utama yang mempengaruhi dispersi polutan adalah kecenderungan molekul-molekul polutan untuk berdifusi. Pada Bab II telah dijelaskan bahwa proses difusi pada arah tertentu merupakan suatu fenomena statistika. Hal ini ditandai dengan perilaku molekul-molekul material sepanjang arah yang dipilih memiliki distribusi Gaussian. Selain itu, kurva konsentrasi material terhadap lokasi dari sumber pemberian material yang berdifusi berbentuk lonceng yang serupa dengan kurva distribusi Gaussian. Konsentrasi maksimum terdapat pada sumber pemberian material dan konsentrasi akan semakin berkurang untuk lokasi yang semakin jauh dari sumber. Hasil tersebut akan digunakan sebagai bekal untuk memodelkan proses dispersi polutan dari cerobong asap pabrik dengan Gaussian Plume Model.
3.1 Distribusi Gaussian atau Distribusi Normal
Peubah acak X dikatakan berdistribusi Gaussian atau normal jika memiliki fungsi kepadatan peluang (fkp) yang memenuhi
( )
(
2)
2 1 exp 2 2 x f x μ σ πσ ⎛− − ⎞ = ⎜⎜ ⎟⎟ ⎝ ⎠ untuk −∞ < < ∞ x (3.1) dengan −∞ < < ∞ dan μ 2 . Parameter0
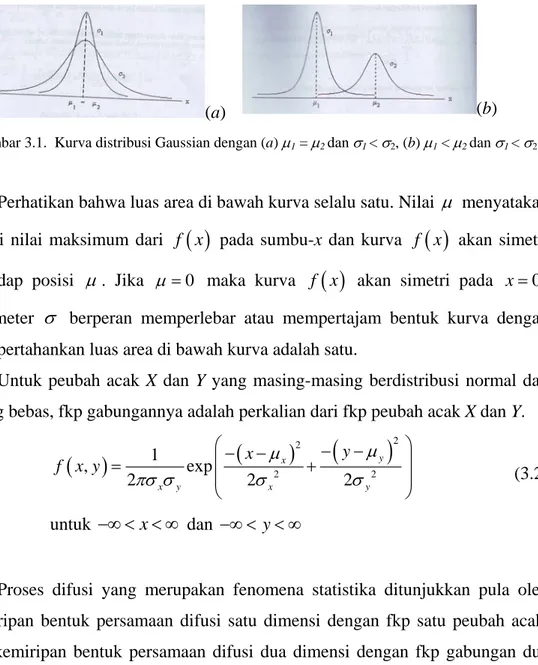
σ > μ disebut rataan dan σ disebut standar deviasi. Perilaku dua parameter tersebut dapat dilihat pada gambar berikut.
(a) (b) Gambar 3.1. Kurva distribusi Gaussian dengan (a) μ1 = μ2 dan σ1 < σ2, (b) μ1 < μ2 dan σ1 < σ2
Perhatikan bahwa luas area di bawah kurva selalu satu. Nilai μ menyatakan lokasi nilai maksimum dari f x pada sumbu-x dan kurva
( )
f x akan simetri( )
terhadap posisi μ . Jika μ =0 maka kurva f x akan simetri pada
( )
. Parameter0
x=
σ berperan memperlebar atau mempertajam bentuk kurva dengan mempertahankan luas area di bawah kurva adalah satu.
Untuk peubah acak X dan Y yang masing-masing berdistribusi normal dan saling bebas, fkp gabungannya adalah perkalian dari fkp peubah acak X dan Y.
(
)
(
)
(
)
2 2 2 2 1 , exp 2 2 2 y x x y x y y x f x y μ μ πσ σ σ σ ⎛− − − − ⎞ ⎜ ⎟ = + ⎜ ⎟ ⎝ ⎠ untuk −∞ < < ∞ dan x −∞ < < ∞ y (3.2)Proses difusi yang merupakan fenomena statistika ditunjukkan pula oleh kemiripan bentuk persamaan difusi satu dimensi dengan fkp satu peubah acak, dan kemiripan bentuk persamaan difusi dua dimensi dengan fkp gabungan dua peubah acak.
3.2 Gaussian Plume Model
Keterangan:
h : tinggi fisik cerobong asap H : tinggi efektif cerobong asap
h
Δ : plume rise (Δ =h H−h)
u : kecepatan angin
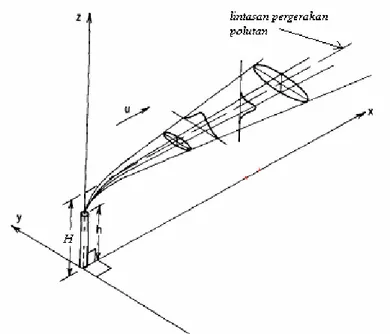
Gambar 3.2. Gaussian Plume Model pada dispersi polutan
Gambar 3.2 memberikan ilustrasi tentang pemodelan dispersi polutan dengan
Gaussian Plume Model. Polutan bergerak searah dengan arah angin yang pada
sumbu-x. Sumbu-y adalah arah yang tegak lurus horizontal dengan sumbu-x dan sumbu-z adalah arah vertikal dengan permukaan tanah pada z=0.
Pada proses dispersi polutan, terjadi difusi tiga dimensi karena molekul-molekul polutan berdifusi pada sumbu-x, sumbu-y, dan sumbu-z. Selain proses difusi, pada sumbu-x juga terjadi proses adveksi atau transportasi polutan yang diakibatkan oleh angin dengan kecepatan u.
Gambar 3.2 menunjukkan bahwa difusi pada sumbu-y dan sumbu-z mengikuti distribusi Gaussian sehingga terdapat parameter μ dan σ pada masing-masing sumbu. Konsentrasi maksimum molekul-molekul polutan pada sumbu-y dan sumbu-z terjadi pada y=0 dan z= . Sementara itu pada H Gaussian Plume Model, σy dan σz disebut juga dengan koefisien dispersi yang menunjukkan ukuran penyebaran polutan pada sumbu-y dan sumbu-z. Koefisien dispersi adalah fungsi dari jarak sepanjang sumbu-x dan kelas stabilitas atmosfer. Semakin jauh jarak yang dipilih, kurva distribusi Gaussian pada sumbu-y dan sumbu-z akan semakin pipih karena molekul-molekul polutan akan semakin menyebar, dengan kata lain nilai σy dan σz akan semakin besar. Selanjutnya
akan dijelaskan proses penurunan persamaan penentuan konsentrasi dengan
Gaussian Plume Model melalui pendekatan konsep fluks seperti pada Bab II.
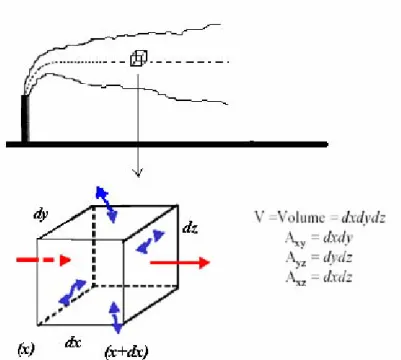
Gambar 3.3. Elemen sangat kecil di antara molekul-molekul polutan yang berukuran dxdydz
Pada Gambar 3.3 bagian atas, bayangkan terdapat elemen sangat kecil yang berada di antara molekul-molekul polutan. Gambar 3.3 bagian bawah menunjukkan bahwa molekul-molekul polutan bergerak melewati elemen tersebut. Selanjutnya akan dilihat laju perubahan jumlah molekul polutan terhadap waktu di dalam elemen yang berukuran , yang dinyatakan dengan dxdydz C dxdydz t ∂
∂ . Suku dx menunjukkan bahwa perubahan terjadi di dalam elemen berukuran dx .
dydz
dydz
Perubahan jumlah molekul polutan di dalam elemen disebabkan oleh proses difusi tiga dimensi yang dialami molekul-molekul polutan dan proses adveksi atau transportasi polutan karena angin berkecepatan u pada sumbu-x. Selanjutnya akan dilihat perubahan jumlah molekul polutan di dalam elemen akibat dua faktor tersebut secara terpisah.
• Perubahan jumlah molekul polutan akibat proses difusi tiga dimensi
Difusi pada sumbu-x menyebabkan adanya fluks di titik x dan titik x+dx seperti pada Gambar 3.3. Laju perubahan jumlah molekul di dalam elemen pada sumbu-x dinyatakan dengan
fluks yang masuk elemen di titik x– fluks yang keluar elemen di titik x+dx
x x dx
q q +
= − (3.3) Sesuai definisi fluks, maka fluks di titik x adalah
(
x)
x D C q dydz x ∂ = − ∂ x C D dydz x ∂ = − ∂ (3.4)Suku menyatakan bahwa molekul-molekul polutan yang memasuki elemen di titik x melewati bidang berukuran dydz. Sementara itu, fluks di titik x+dx diakibatkan oleh fluks di titik x dan perubahan fluks di titik x yang terjadi sepanjang dx atau
dydz
( )
qx dx x ∂ ∂( )
x dx x x q q q dx x + ∂ = + ∂ x x C C D dydz D dydz dx x x x ∂ ∂ ⎛ ∂ ⎞ = − + ⎜− ⎟ ∂ ∂ ⎝ ∂ ⎠ 2 2 x x C C D dydz D dxdydz x x ∂ ∂ = − − ∂ ∂ (3.5) Substitusikan (3.4) dan (3.5) ke (3.3) 2 2 x x dx x x x C C Cq q D dydz D dydz D dxdydz
x x x
+
∂ ∂ ∂
− = − + +
∂ ∂ ∂
Jadi, laju perubahan jumlah molekul di dalam elemen karena difusi pada sumbu-x adalah 2 2 x x dx x C q q D dxdydz x + ∂ − = ∂ (3.6)
Proses difusi molekul-molekul polutan pada sumbu-y dan sumbu-z sama dengan pada sumbu-x, hanya luas bidang yang dilewatinya berbeda. Pada sumbu-y, luas bidang yang dilewati molekul adalah dxdz dan molekul bergerak di dalam elemen sepanjang dy. Sementara pada sumbu-z, luas bidang yang dilewati molekul adalah dxdy dan molekul bergerak di dalam
elemen sepanjang dz. Analog dengan laju perubahan jumlah molekul di dalam elemen pada sumbu-x, diperoleh laju perubahan jumlah molekul di dalam elemen karena difusi pada sumbu-y adalah
2 2 y y dy y C q q D dxdydz y + ∂ − = ∂ (3.7)
dan pada sumbu-z adalah 2 2 z z dz z C q q D dxdydz z + ∂ − = ∂ (3.8)
• Perubahan jumlah molekul akibat proses adveksi pada sumbu-x
Pada titik x, terdapat sejumlah molekul polutan yang memasuki elemen akibat terbawa angin dengan kecepatan u dan keluar dari elemen melalui titik x+dx. Molekul-molekul tersebut melewati bidang dengan luas dydz. Karena terbawa oleh angin, laju aliran polutan tersebut sangat besar dan dikenal dengan bulk motion. Laju aliran molekul polutan akibat angin di titik x, dinotasikan dengan B adalah x
x
B =uCdydz (3.9)
Sementara laju aliran molekul polutan akibat angin di titik x+dx diakibatkan oleh aliran polutan di titik x dan perubahan aliran polutan di titik x yang terjadi sepanjang dx atau
( )
B dxxx ∂ ∂ adalah
( )
x dx x x B B B dx x + ∂ = + ∂(
)
uC dydz uC dydz dx x ∂ = + ∂ C uC dydz u dxdydz x ∂ = + ∂ (3.10)Jadi, laju perubahan jumlah molekul di dalam elemen pada sumbu-x karena transportasi polutan oleh angin berkecepatan u adalah
x x dx
C
B B uCdydz uCdydz u dxdydz
x C u dxdydz x + ∂ − = − − ∂ ∂ = − ∂ (3.11)
Dari dua uraian di atas, dapat disimpulkan bahwa laju perubahan jumlah molekul polutan di dalam elemen akibat proses difusi tiga dimensi dan proses adveksi pada sumbu-x dapat dinyatakan dengan
2 2 2 2 2 2 x y z C dxdydz t C C C C
D dxdydz D dxdydz D dxdydz u dxdydz
x y z x ∂ ∂ ∂ ∂ ∂ ∂ = + + − ∂ ∂ ∂ ∂ (3.12)
Kalikan kedua ruas dengan 1
dxdydz 2 2 2 2 2 2 x y z C C C C D D D u t x y z C x ∂ ∂ ∂ ∂ = + + − ∂ ∂ ∂ ∂ ∂ ∂ (3.13)
Sebelumnya telah diasumsikan bahwa dispersi polutan berlangsung dalam kondisi steady-state yang secara matematis dinyatakan dengan dC 0
dt = . Selain itu, transportasi polutan karena angin jauh lebih dominan daripada difusi molekul pada sumbu-x yaitu
2 2 x dC C u D dx x ∂ >> ∂ sehingga faktor 2 2 x C D x ∂ ∂ dapat diabaikan. Oleh karena itu, proses dispersi polutan dapat disederhanakan menjadi kasus difusi dua dimensi dan (3.13) direduksi menjadi
2 2 2 2 0 Dy C Dz C u y z ∂ ∂ = + − ∂ ∂ C x ∂ ∂ 2 2 2 2 y z C C u D D C x y z ∂ = ∂ + ∂ ∂ ∂ ∂ 2 2 2 2 y z D D C C C x u y u z ∂ = ∂ + ∂ ∂ ∂ ∂ (3.14.a) (3.14.b) (3.14.b) ekivalen dengan PDP difusi dua dimensi sehingga dapat disimpulkan bahwa (3.14) mempunyai solusi umum
2 2 exp 4 y 4 z K y u z u C x xD xD ⎡ ⎛ ⎞⎤ = ⎢−⎜⎜ + ⎟⎟⎥ ⎢ ⎝ ⎠⎥ ⎣ ⎦ (3.15)
K adalah konstanta sembarang yang nilainya ditentukan oleh kondisi batas pada
masalah dispersi polutan ini, yaitu:
• Konsentrasi pada sumber dispersi polutan besar atau C dengan .
→ ∞ 0
• Konsentrasi pada jarak yang jauh dari sumber dispersi mendekati nol atau dengan
0
C→ x→ ∞.
• Pada permukaan tanah tidak terjadi difusi atau Dz C 0 z
∂ →
∂ untuk z=0. • Laju aliran polutan dari sumber dispersi akibat angin yang melalui
bidang-yz adalah konstan karena dispersi polutan berlangsung dalam kondisi steady-state. Laju aliran ini sama dengan laju emisi polutan atau kekuatan
sumber dispersi polutan yang dinotasikan dengan Q dan memiliki dimensi . Kondisi batas ini dapat diambil karena sebelumnya telah diasumsikan bahwa pada sumbu-x tidak ada reaksi kimia atau penyerapan oleh media lain yang dapat mengurangi kuantitas polutan. Secara matematis, kondisi batas ini dinyatakan dengan
1
M T−
⎡⎣ ⎤⎦
z
Q=
∫∫
uC dyd , untuk x>0 (3.16) Batas pengintegralan untuk y adalah dari −∞ sampai ∞, sedangkan untukz tergantung pada lokasi sumber dispersi polutan.
3.2.1 Sumber Dispersi Polutan di Permukaan Tanah
Untuk sumber dispersi polutan yang berada di permukaan tanah atau pada , batas pengintegralan untuk z adalah dari 0 sampai ∞ karena molekul polutan hanya akan berdifusi ke sumbu-z positif . Dengan batas tersebut, akan ditentukan konstanta K dengan mensubstitusikan (3.15) ke (3.16) sehingga diperoleh 0 z= 2 2 0 exp 4 y 4 z K u y u z u Q d x xD xD ∞ ∞ −∞ ⎡ ⎛ ⎞⎤ = ⎢−⎜⎜ + ⎟⎟⎥ ⎢ ⎝ ⎠⎥ ⎣ ⎦
∫ ∫
ydz (3.17) Misalkan y y y D ≡ dan z z z D ≡ maka (3.14) menjadi 2 2 0 exp 4 4 y z y z K u y u z u Q D D dy x xD ∞ ∞ −∞ ⎛ ⎞ ⎛ ⎞ = ⎜⎜− ⎟⎟ ⎜− ⎟ ⎝ ⎠ ⎝ ⎠∫
∫
dz xD (3.18)Sementara dari integral standar [9] diperoleh bahwa
(
2 2)
0 exp 2 a x dx a π ∞ − =∫
Selanjutnya (3.18) menjadi 2 y z K u D D x Q x u π = (3.19) sehingga diperoleh 2 y z Q K D D π = (3.20)
3.2.2 Sumber Dispersi Polutan di Ketinggian H dari Permukaan Tanah
Dari Gambar 3.2 terlihat bahwa sumber dispersi polutan dipandang terletak pada koordinat
(
sehingga molekul polutan dapat berdifusi pada sumbu-z positif dan negatif. Akan tetapi salah satu kondisi batas menyatakan bahwa tidak ada difusi pada)
0, 0, H
0
z= . Di sisi lain, walaupun permukaan tanah dapat ditembus untuk difusi molekul polutan, sebagian besar molekul polutan akan berada di antara permukaan tanah dan ketinggian H. Hal ini juga ditunjukkan oleh kurva distribusi Gaussian. Oleh karena itu, batas pengintegralan untuk z adalah dari −∞ sampai ∞. Penambahan pengintegralan untuk z dari 0z= ke pada Q, memberikan galat yang kecil dan perhitungan matematis akan lebih mudah dikerjakan [9].
−∞
Dengan batas pengintegralan baru di atas, konstanta K akan ditentukan dengan mensubstitusikan (3.15) ke (3.16) sehingga diperoleh
2 2 exp 4 y 4 z K u y u z u Q d x xD xD ∞ ∞ −∞ −∞ ⎡ ⎛ ⎞⎤ = ⎢−⎜⎜ + ⎟⎟⎥ ⎢ ⎝ ⎠⎥ ⎣ ⎦
∫ ∫
ydz (3.21) Misalkan y y y D ≡ dan z z z D ≡ maka (3.19) menjadi 2 2 0 exp 4 4 y z y z K u y u z u Q D D dy x xD ∞ ∞ −∞ ⎛ ⎞ ⎛ ⎞ = ⎜⎜− ⎟⎟ ⎜− ⎟ ⎝ ⎠ ⎝ ⎠∫
∫
dz xD (3.22)Sementara dari integral standar diperoleh bahwa
(
2 2)
exp a x dx a π ∞ −∞ − =∫
Selanjutnya (3.20) menjadi 4 y z K u D D x Q x u π = (3.23) sehingga diperoleh 4 y z Q K D D π = (3.24)
Sumber dispersi yang berada pada koordinat
(
0, 0, H menyebabkan)
kurva distribusi Gaussian pada sumbu-z akan mencapai nilai maksimum pada titik z= sehingga (3.15) perlu dikoreksi menjadi H(
)
2 2 exp 4 y z z H K u y C x x D D ⎡ ⎛ − ⎞⎤ ⎢ ⎥ = − ⎜⎜ + ⎟⎟ ⎢ ⎝ ⎠⎥ ⎣ ⎦ (3.25) Substitusi (3.24) ke (3.25) diperoleh(
)
2 2 exp 4 4 y z y z z H Q u y C x D D x D D π ⎡ ⎛ − ⎞⎤ ⎢ ⎥ = − ⎜⎜ + ⎟⎟ ⎢ ⎝ ⎠⎥ ⎣ ⎦ (3.26)Sebelumnya telah disinggung bahwa difusi molekul-molekul polutan pada sumbu-y dan sumbu-z berdistribusi Gaussian sehingga terdapat parameter μ dan σ pada masing-masing sumbu. Konsentrasi maksimum molekul-molekul polutan pada sumbu-y dan sumbu-z terjadi pada dan
0 y= z=H sehingga μy = dan 0 μz =H. Jadi fkp gabungan untuk difusi molekul-molekul polutan pada sumbu-y dan sumbu-z yang berdistribusi Gaussian analog dengan (3.2) adalah
(
)
2 2 2 2 1 ( , ) exp 2 y z 2 y 2 z z H y f y z πσ σ σ σ ⎛ − − − ⎞ = ⎜⎜ + ⎝ ⎠⎟⎟ (3.27)Dengan membandingkan (3.26) dan (3.27), dapat didefnisikan
2 4 2 y Dy x u σ ≡ 2 2 y y u D x σ ≡ (3.28.a) 2 4 2 z z D x u σ ≡ 2 2 z z u D x σ ≡ (3.28.b)
Substitusikan (3.28) ke (3.26) sehingga diperoleh konsentrasi polutan di lokasi tertentu adalah
(
, ,)
exp 22(
2)
2 2 y z 2 y 2 z z H Q y C x y z u π σ σ σ σ ⎛ − − − ⎞ = ⎜⎜ + ⎟⎟ ⎝ ⎠ (3.29)3.2.3 Refleksi pada Gaussian Plume Model
Persamaan pada (3.26) mengasumsikan bahwa tidak ada penghalang bagi polutan untuk berdispersi ke arah vertikal baik ke atas atau ke bawah. Sementara pada kondisi yang sebenarnya, tanah menjadi penghalang bagi difusi molekul-molekul polutan ke bawah. Di sisi lain, telah diasumsikan bahwa polutan yang jatuh tidak diserap oleh tanah tetapi dipantulkan seluruhnya ke atmosfer. Yang menjadi permasalahan adalah bagaimana menentukan konsentrasi polutan yang direfleksikan kembali ke atmosfer.
Adanya refleksi polutan oleh tanah pada jarak x ekivalen dengan mengasumsikan adanya cerobong asap imajiner sebagai cermin dari cerobong asap sebenarnya. Oleh karena itu, sumber dispersi polutan dari cerobong asap imajiner ini berada di koordinat
(
0, 0, H−)
.Gambar 3.4. Dispersi polutan yang disertai refleksi oleh permukaan tanah dan cerobong asap imajiner untuk menjelaskan pengaruh refleksi tersebut
Area yang dinotasikan dengan R adalah daerah hasil refleksi polutan. Dengan adanya refleksi polutan kembali ke atmosfer, konsentrasi polutan di area R akan bertambah. Selanjutnya akan dijelaskan seberapa besar bertambahnya konsentrasi polutan akibat refleksi tersebut.
Permasalahan polutan yang dipantulkan kembali ke atmosfer dapat dijelaskan dengan analogi berikut. Ingat kembali kasus difusi satu dimensi pada pipa kecil, tetapi terdapat penghalang di salah satu ujungnya seperti pada gambar berikut.
Gambar 3.5. Difusi satu dimensi dengan penghalang di salah satu ujungnya
Pada Gambar 3.5, molekul-molekul material berdifusi sepanjang sumbu-x’. Untuk menentukan konsentrasi material di suatu titik di dalam pipa tersebut, tambahkan sumber difusi imajiner yang merupakan ’cermin’ dan identik dengan sumber difusi yang sebenarnya.
Gambar 3.6. Sumber difusi imajiner sebagai ’cermin’ dari sumber difusi yang sebenarnya.
Penghalang di salah satu ujung pipa pada sumbu-x’ terletak di , sedangkan sumber difusi yang sebenarnya terletak di
' 0
x =
'
x = dan sumber L
difusi imajiner di 'x = − . L
Setelah material tertentu disuntikkan di titik 'x = , molekul-molekul L
material yang berdifusi ke sumbu-x’ negatif akan membentur penghalang kemudian dipantulkan kembali ke sumbu-x’ positif. Begitu juga dengan penyuntikan material imajiner di titik 'x = − , molekul-molekul material L
yang berdifusi ke sumbu-x’ positif akan membentur penghalang kemudian dipantulkan kembali ke sumbu-x’ negatif. Hal ini menyebabkan konsentrasi di suatu titik baik pada sumbu-x’ positif atau sumbu-x’ negatif setelah pemantulan akan bertambah sebesar konsentrasi molekul yang dipantulkan oleh penghalang.
Untuk memudahkan penentuan konsentrasi material di suatu titik akibat pemantulan oleh penghalang, abaikan dahulu keberadaan penghalang dan asumsikan bahwa molekul mampu ’menembus’
penghalang tersebut. Ilustrasi pergerakan molekul-molekul tersebut diberikan pada Gambar 3.7.
Gambar 3.7. Pergerakan molekul dengan asumsi molekul mampu ’menembus’ penghalang
Tanda panah menunjukkan arah pergerakan molekul dan garis putus-putus menunjukkan pergerakan molekul dari sumber difusi imajiner. Selanjutnya perhatikan bagian sumbu-x’ positif yang merupakan permasalahan awal seperti pada Gambar 3.5.
Gambar 3.8. Refleksi molekul oleh penghalang yang ditandai dengan garis putus-putus
Dari Gambar 3.8 dapat disimpulkan bahwa konsentrasi molekul yang dipantulkan tersebut sama dengan konsentrasi molekul yang berasal dari sumber imajiner saat ’menembus’ penghalang.
Konsentrasi molekul di suatu titik pada waktu tertentu di dalam pipa kecil dengan penghalang di satu ujungnya ditentukan oleh konsentrasi molekul untuk sumber difusi di titik 'x = yaitu L
(
)
2 2 ' exp 2 4 z x L M Dt σ π ⎛− − ⎞ ⎜ ⎟ ⎜ ⎟ ⎝ ⎠ (3.30)dan konsentrasi molekul akibat pantulannya untuk sumber difusi imajiner di titik 'x = − yaitu L
(
)
2 2 ' exp 2 4 z x L M Dt σ π ⎛− + ⎞ ⎜ ⎟ ⎜ ⎟ ⎝ ⎠ (3.31)Jadi persamaan difusi satu dimensi untuk kasus ini adalah
( )
(
2)
2(
2)
2 ' ' ', exp exp 2 2 4 z 4 z x L x L M M C x t Dt σ Dt σ π π ⎛− − ⎞ ⎛− + = ⎜⎜ ⎟⎟+ ⎜⎜ ⎝ ⎠ ⎝ ⎞ ⎟ ⎟ ⎠ (3.32) Sesuai penjelasan tentang distribusi Gaussian, suku 'x = Lmenunjukkan bahwa konsentrasi molekul untuk sumber difusi yang sebenarnya mencapai nilai maksimum di titik 'x = . Begitu juga L
konsentrasi molekul akibat pantulannya untuk sumber difusi imajiner yang mencapai nilai maksimum di titik x'= −L .
Jika diterapkan pada masalah dispersi polutan dengan refleksi polutan oleh permukaan tanah, masalah difusi satu dimensi di atas terjadi pada sumbu-z dengan permukaan tanah sebagai penghalang atau di titik . Pada sumbu-z, sumber dispersi polutan terdapat di titik dan sumber dispersi imajiner terdapat di titik
0
z= z=H
z= − . Oleh karena itu, H
konsentrasi polutan untuk sumber dispersi polutan di titik z= seperti H
pada (3.29) adalah
(
)
2 2 2 2 exp 2 y z 2 y 2 z z H Q y C u π σ σ σ σ ⎛ − − − ⎞ = ⎜⎜ + ⎝ ⎠⎟⎟ (3.33)dan konsentrasi polutan untuk sumber dispersi imajiner di titik z= − H
adalah
(
)
2 2 2 2 exp 2 y z 2 y 2 z z H Q y C u π σ σ σ σ ⎛ − − + ⎞ = ⎜ + ⎜ ⎝ ⎠ ⎟ ⎟ (3.34)Jadi, konsentrasi polutan hasil dispersi cerobong asap di lokasi tertentu dengan refleksi polutan oleh permukaan tanah adalah
(
, ,)
exp 22(
2)
2 exp 22(
2)
2 2 y z 2 y 2 z 2 y z 2 y 2 z z H z H Q y Q y C x y z u u π σ σ σ σ π σ σ σ σ ⎛ − − − ⎞ ⎛ − − + = ⎜⎜ + ⎟⎟+ ⎜⎜ + ⎝ ⎠ ⎝ ⎞ ⎟ ⎟ ⎠(
, ,)
exp 22 exp(
2)
2 exp(
)
22 y z 2 y 2 z 2 z z H z H Q y C x y z u π σ σ σ σ σ 2 ⎡ ⎛ ⎞ ⎛ ⎤ ⎛ − ⎞⎢ − − − + ⎞⎥ = ⎜⎜ ⎟⎟ ⎜⎜ ⎟⎟+ ⎜⎜ ⎟⎟ ⎢ ⎥ ⎝ ⎠⎣ ⎝ ⎠ ⎝ ⎠⎦ (3.35)
Keterangan:
• C: konsentrasi polutan hasil dispersi cerobong asap ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ 3 m gr
• x : lokasi searah angin dan arah gerak polutan
( )
m • y: lokasi yang tegak lurus horizontal dengan arah angin( )
m• z: lokasi yang tegak lurus vertikal dengan arah angin
( )
m• Q: laju emisi polutan ⎟
⎠ ⎞ ⎜ ⎝ ⎛ ik gr det • σy: koefisien dispersi pada arah-y
( )
m• σ : koefisien dispersi pada arah-z z
( )
m• u : kecepatan angin
(
)
ik m
det • H : tinggi efektif cerobong asap
( )
mKasus yang lebih menarik perhatian, terutama untuk masalah lingkungan adalah konsentrasi polutan di permukaan tanah atau . Konsentrasi polutan di lokasi tertentu pada permukaan tanah dengan refleksi polutan oleh permukaan tanah adalah
0
z=
(
)
22(
2)
2(
)
20 0
, , 0 exp exp exp
2 y z 2 y 2 z 2 z H H Q y C x y u π σ σ σ σ σ 2 ⎡ ⎛ ⎞ ⎛ ⎤ ⎛ − ⎞⎢ − − − + ⎞⎥ = ⎜⎜ ⎟⎟ ⎜⎜ ⎟⎟+ ⎜⎜ ⎟⎟ ⎢ ⎥ ⎝ ⎠⎣ ⎝ ⎠ ⎝ ⎠⎦ 2 2 2 2 exp 2 exp 2 y z 2 y 2 z Q y H u π σ σ σ σ ⎛ − ⎞ ⎡ ⎛− ⎞⎤ = ⎜⎜ ⎟ ⎢⎟ ⎜ ⎟⎥ ⎝ ⎠ ⎣ ⎦ ⎝ ⎠ 2 2 2 exp 2 2 y z y z Q y u π σ σ σ σ ⎛ − − ⎞ = ⎜⎜ ⎝ 2⎠ H + ⎟⎟ (3.36) Sementara konsentrasi polutan di lokasi tertentu pada permukaan tanah sepanjang lintasan pergerakan polutan, dengan refleksi polutan oleh permukaan tanah adalah
(
, 0, 0)
exp 22 2 y z z Q H C x u π σ σ σ ⎛− ⎞ = ⎜ ⎟ ⎝ ⎠ (3.37)Bertambahnya konsentrasi polutan akibat refleksi oleh permukaan tanah juga dapat dijelaskan dengan ilustrasi berikut.
Gambar 3.9. Konsentrasi polutan bertambah akibat refleksi polutan
Gambar 3.9 memberikan kurva difusi satu dimensi untuk konsentrasi polutan terhadap sumbu-z dengan dua sumber difusi seperti di atas [9]. Pada posisi A belum terjadi refleksi polutan sehingga tidak ada penambahan konsentrasi. Akan tetapi dengan bertambahnya x, akan terjadi tumpang tindih antara kurva
( )
1 yaitu kurva konsentrasi polutan akibat sumber difusi di titik z= dan kurva H( )
2 yaitu kurva konsentrasi polutan akibat sumber difusi imajiner di titik z= − . Pada posisi B, Hdengan menambahkan bagian dari kurva
( )
2 yang berada di atas permukaan tanah ke kurva( )
1 , konsentrasi polutan akan bertambah sebesar luas area yang diarsir. Jadi, pengaruh adanya refleksi polutan oleh permukaan tanah adalah menambah konsentrasi polutan.Gambar berikut memberikan gambaran singkat mengenai kurva konsentrasi polutan.
Kurva konsentrasi polutan di permukaan tanah sepanjang lintasan pergerakan polutan atau C x
(
, 0, 0)
mencapai nilai maksimum untuk suatux, kemudian akan semakin menurun dengan bertambahnya x. Konsentrasi maksimum akan dicapai saat terjadi refleksi polutan oleh permukaan tanah. Sementara itu, kurva konsentrasi polutan pada sumbu-z adalah kurva Gaussian yang berpusat di z= . Begitu juga pada sumbu-y yang H
berpusat di y=0.
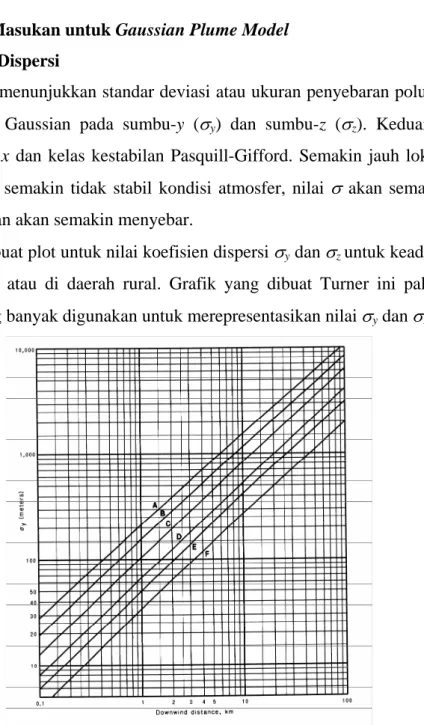
3.3 Parameter Masukan untuk Gaussian Plume Model 3.3.1 Koefisien Dispersi
Koefisien dispersi menunjukkan standar deviasi atau ukuran penyebaran polutan yang berdistribusi Gaussian pada sumbu-y (σy) dan sumbu-z (σz). Keduanya
adalah fungsi dari x dan kelas kestabilan Pasquill-Gifford. Semakin jauh lokasi pada sumbu-x dan semakin tidak stabil kondisi atmosfer, nilai σ akan semakin besar karena polutan akan semakin menyebar.
Turner membuat plot untuk nilai koefisien dispersi σydan σz untuk keadaan
di dataran terbuka atau di daerah rural. Grafik yang dibuat Turner ini paling diterima dan paling banyak digunakan untuk merepresentasikan nilai σy dan σz .
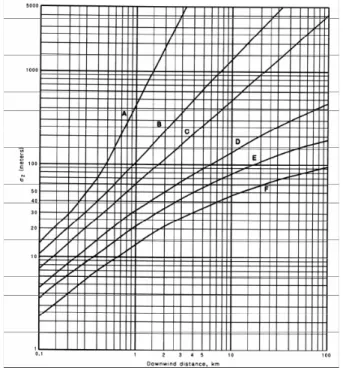
Gambar 3.12. Grafik koefisien dispersi pada sumbu-z di daerah rural
Karena nilai σ yang akurat dari grafik tersebut sulit diperoleh, persamaan-persamaan empiris untuk menentukan σy dan σz mulai dikembangkan. Salah
satunya adalah persamaan McMullen, yaitu
( ) ( )
(
2)
ln ln expI+J x +K x = σ (3.38)dengan σ : koefisien dispersi di daerah rural ( m )
x : jarak searah dengan arah angin (km) exp
( )
a =ea =2,71828aKonstanta I, J, dan K menurut McMullen tampak pada tabel berikut.
Untuk memperoleh nilai
σy
Untuk memperoleh nilai
σz Kelas Stabilitas Pasquill I J K I J K A 5,357 0,8828 -0,0076 6,035 2,1097 0,2770 B 5,058 0,9024 -0,0096 4,694 1,0629 0,0136 C 4,651 0,9181 -0,0076 4,110 0,9201 -0,0020 D 4,230 0,9222 -0,0087 3,414 0,7371 -0,0316 E 3,922 0,9222 -0,0064 3,057 0,6794 -0,0450
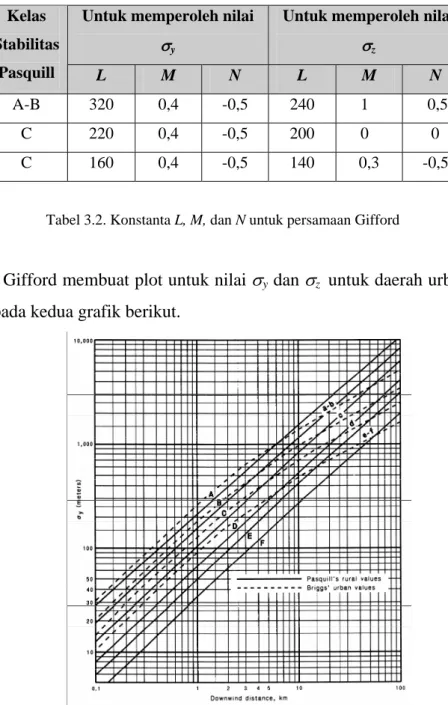
Pada daerah urban terdapat lebih banyak bangunan sehingga angin akan semakin bergolak karena menabrak bangunan-bangunan tersebut dan suhu udara sekitar akan semakin hangat. Hal ini mengakibatkan kondisi udara semakin tidak stabil dibandingkan di daerah rural sehingga nilai σakan semakin besar. Gifford memberikan persamaan untuk memperoleh nilai σy dan σz di wilayah urban, yaitu
( )(
)
NMx
Lx +
= 1
σ (3.39)
Konstanta L, M, dan N menurut Gifford tampak pada tabel berikut.
Untuk memperoleh nilai
σy
Untuk memperoleh nilai
σz Kelas Stabilitas Pasquill L M N L M N A-B 320 0,4 -0,5 240 1 0,5 C 220 0,4 -0,5 200 0 0 C 160 0,4 -0,5 140 0,3 -0,5
Tabel 3.2. Konstanta L, M, dan N untuk persamaan Gifford
Kemudian Gifford membuat plot untuk nilai σy dan σz untuk daerah urban
seperti tampak pada kedua grafik berikut.
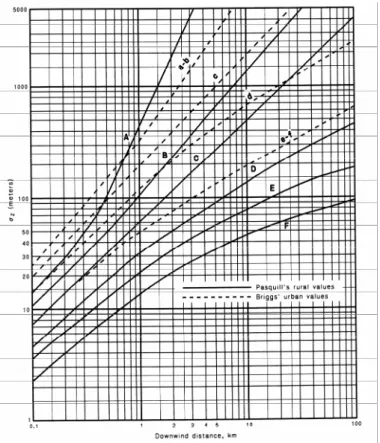
Gambar 3.14. Grafik koefisien dispersi pada sumbu-z di daerah urban
3.3.2 Plume Rise
Plume rise ( ) adalah kenaikan polutan setelah keluar dari cerobong asap, atau selisih antara tinggi efektif dengan tinggi fisik cerobong asap. Setelah keluar dari cerobong asap, polutan bergerak vertikal naik karena mempunyai momentum vertikal yang disebabkan oleh:
h
Λ
1. tingginya kecepatan awal yaitu kecepatan keluar polutan,
2. kemampuan bergerak naik atau buoyancy akibat tingginya suhu polutan. Momentum polutan saat keluar dari cerobong asap relatif terhadap momentum angin sekitar menentukan apakah polutan akan bergerak vertikal ke atas atau dibelokkan oleh angin. Walaupun dibelokkan angin, lintasan awalnya akan naik karena polutan mempunyai komponen kecepatan vertikal dari kecepatan awal dan momentum buoyancy.
Dengan mengabaikan gesekan di udara dan mengasumsikan tidak ada kalor yang hilang (kondisi adiabatik), kecepatan awal dan momentum buoyancy yang dimiliki polutan tetap terpelihara. Akan tetapi massa polutan bertambah karena
bercampur dengan udara sekitar, sehingga kecepatan polutan relatif terhadap terhadap kecepatan angin berkurang walaupun momentum polutan terpelihara.
Percampuran polutan dengan udara sekitar terjadi karena pergolakan polutan akibat kecepatan awal dan momentum buoyancy (self-induced
turbulence), dan akibat pergolakan udara di udara (atmospheric turbulence). Semakin jauh polutan bergerak maka polutan semakin bercampur dengan udara sekitar dan kecepatannya semakin berkurang. Komponen kecepatan vertikalnya secara bertahap akan mendekati nol sehingga lintasan pergerakan polutan semakin mendatar. Oleh karena itu, tinggi lintasan ini pada suatu titik adalah fungsi dari jarak antara sumber keluarnya polutan dengan titik tersebut. Jadi, variabel-variabel yang mempengaruhi plume rise adalah:
• kecepatan (awal) polutan saat keluar dari cerobong asap, • suhu polutan saat keluar dari cerobong asap,
• kecepatan angin sekitar,
• jarak dari sumber keluarnya polutan sepanjang sumbu-x, • pergolakan udara (atmospheric turbulence), dan
• karakteristik cerobong asap.
Berbagai persamaan dan model matematika telah diajukan untuk menentukan besarnya kenaikan polutan yang keluar dari cerobong asap. Dua di antara persamaan tersebut diajukan oleh Holland dan Briggs. Persamaan Holland adalah sebagai berikut:
3 1, 5 2, 68.10 p p u v d T T h P u T − − ⎛ ⎞ Λ = ⎜ + ⎟ ⎝ ⎠ u d (3.40) dengan - Λh : plume rise ( m )
- vpc : kecepatan polutan keluar dari cerobong asap ( det m ) - d : diameter cerobong asap (m) - u : kecepatan angin (
det m ) - P : tekanan udara (milibar)
- T u : suhu udara sekitar ( °K ) ) ( 1 meter x milibar
- 2,68.10-3 adalah konstanta dengan satuan
Bentuk umum dari kurva u terhadap Λh untuk persamaan Holland adalah
Gambar 3.15. Kurva u terhadap Λh untuk persamaan Holland
uar polutan adalah 6–30
Briggs kemudian mempublikasikan persamaan untuk menentukan plume
rise dengan memperhitungkan variabel-variabel di atas, untuk polutan yang dapat dibelokkan angin, panas, ringan dan dapat mengapung (buoyant). Diasumsikan kecepatan kel
det
m dan suhu polutan saat keluar adalah
20–260 °C.
l stage), dan tahap akhir (final stage). Perhatikan gambar di bawah ini.
1
3.3.2.1 Lintasan Pergerakan Plume
Briggs menyatakan bahwa lintasan untuk polutan dengan karakteristik di atas didominasi oleh pengaruh momentum buoyancy [1]. Lintasan tersebut dibagi dalam tiga tahap, yaitu tahap awal (initial stage), tahap transisi (transitiona
Gambar 3.16. Lintasan pergerakan polutan
Keterangan
1 : gerakan polutan didominasi oleh kecepatan awal 2 : gerakan polutan didominasi oleh momentumbuoyancy
Initial rise : Percampuran polutan dengan udara sekitar didominasi oleh pergolakan
polutan akibat kecepatan awal dan momentum
Final rise : Percampuran polutan dengan udara sekitar didominasi oleh pergolakan udara Transitional rise : Transisi pada percampuran polutan antara pengaruh pergolakan polutan
sendiri dan pengaruh pergolakan udara
x* : jarak di mana pengaruh pergolakan udara mulai mendominasi percampuran polutan
dengan udara sekitar
a x* : jarak disumsikan terjadinya plume rise yang maksimal (menurut Briggs adalah
sekitar 3,5 x*)
3.3.2.2 Parameter Stabilitas dan Parameter Fluks Buoyancy
Briggs mendefinisikan parameter stabilitas yang dinotasikan dengan s
( 2
sec
1 ) untuk mengklasifikasi pengaruh pergolakan udara di atmosfer pada plume rise [1]. Parameter tersebut didefinisikan dengan:
dz d T g s u θ ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ = (3.41) dz dθ
adalah gradien kekuatan suhu (potential temperature gradient), yaitu selisih antara gradien suhu udara sekitar (ambient temperature
gradient) dengan laju perubahan adiabatik (adiabatic lapse rate) yang ideal.
Gradien suhu udara sekitar dinotasikan dengan dz dT
adalah perubahan suhu udara sekitar dengan bertambahnya ketinggian, merupakan fungsi dari antara lain waktu, musim, banyaknya sinar matahari, kecepatan angin, dan laju transfer panas dari permukaan tanah ke udara.
Laju perubahan adiabatik (dinotasikan dengan Γ ) dalam kondisi ideal adalah laju perubahan suhu udara kering untuk setiap ketinggian tertentu tanpa adanya panas yang hilang. Laju perubahan ini didefinisikan sebagai penurunan suhu sebesar 5,5°F setiap ketinggian 1000 kaki.
Gradien kekuatan suhu yang positif mengurangi pergolakan udara dan menstabilkan atmosfer. Sebaliknya gradien kekuatan suhu negatif meningkatkan pergolakan udara dan mengurangi kestabilan atmosfer, sedangkan
dz dθ
= 0 akan menetralkan atmosfer. Untuk itu, dapat dikatakan bahwa s adalah ukuran pengaruh pergolakan udara di atmosfer pada
plume rise.
Tabel di bawah ini adalah nilai gradien kekuatan suhu untuk masing-masing kelas stabilitas Pasquill-Gifford.
Gradien suhu udara sekitar (rata-rata)
Laju perubahan adiabatik
Gradien kekuatan suhu
dz dT Γ = −Γ dz dT dz dθ Kelas Stabilitas Pasquill
(°F/1000 kaki) (°F/1000 kaki) (°F/1000 kaki) (°K/m)
A <-10,4 -5,5 <-4,9 <-0,009 B -9,9 -5,5 -4,4 -0,008 C -8,8 -5,5 -3,3 -0,006 D -5,5 -5,5 0 0 E 2,8 -5,5 8,3 0,015 F >8,2 -5,5 >13,7 >0,025
Tabel 3.3. Potential Temperature Gradient ( dz dθ
Sementara itu, Briggs menggunakan parameter fluks buoyancy yang dinotasikan dengan F, untuk mengklasifikasi laju aliran buoyancy pada polutan yang keluar dari cerobong asap [1], yaitu
⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ − = pc u pc pc T T T r gv F 2 (3.42)
Setelah mengalami serangkaian proses revisi, pada tahun 1972 Briggs memberikan satu perangkat persamaan untuk menentukan plume rise pada masing-masing kelas stabilitas Pasquill-Gifford.
Kelas stabilitas A, B, C, atau D
• Jika F ≥ 55 m4 /s3 u x F h 3 2 3 1 6 , 1 = Δ untuk x < xf u F u x F hmaks f 6 , 0 3 2 3 1 7 , 38 6 , 1 = = Δ untuk x ≥ xf • Jika F < 55 m4 /s3 u x F h 3 2 3 1 6 , 1 = Δ untuk x < xf u F u x F hmaks f 75 , 0 3 2 3 1 4 , 21 6 , 1 = = Δ untuk x ≥ xf
Kelas stabilitas E atau F
• Jika s u 84 , 1 ≥ xf u x F h 3 2 3 1 6 , 1 = Δ untuk x < xf u F u x F hmaks f 6 , 0 3 2 3 1 7 , 38 6 , 1 = = Δ untuk x ≥ xf dan F ≥ 55 m4/s3 u F u x F hmaks f 75 , 0 3 2 3 1 4 , 21 6 , 1 = = Δ untuk x ≥ xf dan F < 55 m4/s3
• Jika s u 84 , 1 < xf u x F h 3 2 3 1 6 , 1 = Δ untuk x < s u 84 , 1 3 1 4 , 2 ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ = Δ us F hmaks untuk x ≥ s u 84 , 1
xf adalah jarak searah angin dari cerobong asap sampai titik terjadinya plume
rise maksimal (m) yaitu:
xf = 119 F0,4 untuk F ≥ 55 m4/s3
= 49F0,625 untuk F < 55 m4
3.3.3 Kecepatan Angin
Salah satu faktor penting yang mempengaruhi sejauh mana polutan bergerak vertikal ke atas sebelum bergerak horizontal adalah kecepatan angin. Selain itu, kecepatan angin juga menjadi parameter penting dalam persamaan Gaussian
Plume Model.
Yang menjadi permasalahan adalah kecepatan angin berbeda-beda bergantung pada ketinggian. Pada saat polutan bergerak vertikal ke atas, ketinggiannya berbeda-beda sehingga akan sulit menentukan besarnya dengan tepat. Oleh karena itu, sebagai persyaratan minimum kecepatan angin yang digunakan pada persamaan Briggs dan persamaan Holland adalah kecepatan angin pada tinggi cerobong asap (h).
h Δ
Kecepatan angin yang digunakan pada Gaussian Plume Model seharusnya adalah kecepatan angin pada semua lokai penyebaran polutan. Tentu saja hal ini akan sulit ditentukan dan menimbulkan kontradiksi:
• pada penurunan Gaussian Plume Model, kecepatan angin disumsikan konstan,
• kecepatan angin tidak konstan karena bergantung pada ketinggian.
Oleh karena itu, sebagai persyaratan minimum kecepatan angin yang digunakan pada Gaussian Plume Model adalah kecepatan angin pada tinggi efektif cerobong asap (H).
Pada umumnya data meteorologis untuk kecepatan angin diperoleh dari pengukuran pada ketinggian 10 m. Oleh karena itu diperlukan suatu metode konversi kecepatan angin dari ketinggian 10 m untuk memperoleh kecepatan angin pada:
• tinggi cerobong asap (h) yang akan digunakan pada persamaan Holland dan persamaan Briggs, dan
• tinggi efektif cerobong asap (H) yang akan digunakan pada Gaussian
Plume Model.
Pengaruh ketinggian pada kecepatan angin secara matematis dinyatakan dengan
n z z g g u h u h ⎛ ⎞ = ⎜⎜ ⎟⎟ ⎝ ⎠ (3.43)
• uz : kecepatan angin pada ketinggian z
• ug : kecepatan angin pada ketinggian 10 m
• hz : ketinggian z
• hg : ketinggian 10 m
Menurut EPA (Enviromental Protection Agency) USA [1], nilai n adalah fungsi dari kelas stabilitas Pasquill-Gifford dan kondisi topografis. Untuk daerah urban dan rural digunakan nilai n berikut
Kelas Stabilitas Pasquill-Gifford n
A 0,15 B 0,15 C 0,20 D 0,25 E 0,40 F 0,60
Tabel 3.4. Nilai konversi kecepatan angin untuk daerah urban
Kelas Stabilitas Pasquill-Gifford n
A 0,11 B 0,11 C 0,12 D 0,17 E 0,29 F 0,45
3.4 Konsentrasi Maksimum pada Permukaan Tanah Sepanjang Sumbu-x Dari Gambar 3.10 terlihat bahwa konsentrasi polutan sepanjang sumbu-x akan mencapai nilai maksimum pada x tertentu, sebelum berkurang menuju nol pada x yang semakin jauh. Secara bertahap, proses difusi sepanjang sumbu-y dan sumbu-z akan menipiskan konsentrasi polutan di permukaan tanah (z = 0) sepanjang arah gerakan polutan (y = 0) atau C(x, 0, 0).
Yang menjadi pertanyaan adalah bagaimana menentukan lokasi terjadinya konsentrasi maksimum (xmax) dan konsentrasi maksimum polutan (Cmax)
tersebut? Salah satu metodenya adalah berdasarkan y
z
σ
σ yang dapat diasumsikan
konstan karena pada Gaussian Plume Model, dispersi polutan berlangsung dalam kondisi steady-state. Misalkan y
z
k
σ
σ = maka σy =kσz dan (3.27) menjadi
(
, 0, 0)
2 exp 22 2 z z Q H C x uk π σ σ ⎡− ⎤ = ⎢ ⎥ ⎣ ⎦ (3.44)Jadi C(x, 0, 0) adalah fungsi dari σz dan secara implisit adalah fungsi dari x untuk kelas stabilitas atmosfer tertentu. xmax danCmax dapat diperoleh dengan
turunan pertama dari (3.44), yaitu
2 2 2 3 2 3 2 ' 0 2 exp exp 2 2 z z z z z C Q H H Q H uk uk π σ σ σ π σ σ 2 = ⎡− ⎤= ⎡− ⎤ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ ⎣ ⎦ 0, 707 2 z H H σ = = (3.45) Perhatikan bahwa 1 2 16 '' Qe 0 C ukH π − −
= < sehingga C mempunyai nilai maksimum dengan titik kritis di σz =0, 707H.
Lokasi terjadinya konsentrasi maksimum hanya dapat ditentukan secara implisit dengan metode ini. Perhatikan bahwa metode ini hanya dapat digunakan untuk plume rise yang dihitung dengan persamaan Holland karena persamaan Briggs membutuhkan masukan x, sementara x dalam kasus ini justru akan ditentukan.
Nilai σz dapat diperoleh dari perkiraan tinggi efektif H berdasarkan persamaan Holland. Dari grafik Turner untuk nilai σz atau dari persamaan McMullen dan persamaan Gifford, perkiraan xmax dapat diperoleh untuk kelas
stabilitas atmosfer tertentu.
Dari (3.45) dapat diperoleh H2 =2σz2, jika disubstitusikan ke (3.44) maka konsentrasi maksimum polutan sepanjang sumbu-x adalah
max 0,1171 y z Q C uσ σ = (3.46)


![Gambar 3.9 memberikan kurva difusi satu dimensi untuk konsentrasi polutan terhadap sumbu-z dengan dua sumber difusi seperti di atas [9]](https://thumb-ap.123doks.com/thumbv2/123dok/4550377.3306346/16.892.276.657.108.318/gambar-memberikan-difusi-dimensi-konsentrasi-polutan-sumber-difusi.webp)