1
Modifikasi Perimetri dengan 2 Kontrol
(Personal Komputer)
Izza Fahma K, Priyambada Cahya Nugraha, Tri Bowo Indrato,
Jurusan Teknik Elektromedik
POLITEKNIK KESEHATAN KEMENTRIAN KESEHATAN SURABAYA
Perimetri adalah alat yang digunakan untuk memeriksa luas lapangan pandang manusia dengan mata terfiksasi sentral dengan cara memberikan stimulus berupa cahaya. Penilaian lapangan pandang merupakan hal yang penting dilakukan pada keadaan penyakit yang mempunyai potensi terjadinya kebutaan. Berdasarkan hal tersebut peneliti membuat modul alat Perimetri untuk mengetahui prosentase seberapa luas lapangan pandang manusia dengan mata terfiksasi sentral.Jenis metode yang digunakan dalam pembuatan modul ini menggunakan metode after only design. Peneliti hanya melihat hasil tanpa mengukur keadaan sebelumnya. Tetapi disini sudah ada kelompok kontrol, walaupun tidak dilakukan randomisasi. Hasil uji luas lapangan pandang yang dilakukan di Rumah sakit sebagai perbandingan dari hasil modul peneliti.
Kata Kunci : Perimetri, stimulus
PENDAHULUAN
Latar Belakang Masalah
Perimetri adalah alat yang digunakan untuk memeriksa luas bidang penglihatan dengan mata terfiksasi sentral. Pada pemeriksaan perimetri klinis, alat perimeter menggunakan tipe stimulus berupa titik-titik cahaya dengan beragam diasreter dan intensitas yang telah ditetapkan sebelumnya. Titik–titik cahaya yang ada, akan menstimulus mata pasien untuk bekerja dan terfokus pada cahaya tersebut (Philadelphia', 2005). Cara kerja alat ini pada saat kondis pasien yang tidak mampu lagi melihat titik-titik cahaya, pasien akan menekan tombol yang telah disediakan operator, tombol tersebut akan memberikan informasi kepada operator dan oleh operator akan mencatat hasil dari pemeriksaan perimetri tersebut.
Pemeriksaan perimetri ini berguna dalam pengobatan dan pencegahan kebutaan khususnya pada penderita penyakit glaukoma (Dahlina, 2009). Glaukoma merupakan sekelompok penyakit saraf optic (neoropatioptik) yang disebabkan oleh efek peningkatan tekanan ocular pada papil saraf
optik. Penyakit ini menyebabkan efek lapang pandang dan hilangnya tajam penglihatan jika lapang pandang sentral terkena (Bruce James. et al, 2006).
Pemeriksaan luas bidang mata manusia merupakan hal yang penting dilakukan, penyakit ini mempunyai potensi terjadinya kebutaan pada manusia karena luas bidang penglihatan manusia mengalami penyempitan, tekanan di dalam bola mata meningkat, sehingga terjadi kerusakan pada saraf optikus dan menyebabkan penurunan fungsi penglihatan. Sebelumya alat perimetri ini telah dibuat oleh Eko Yuli Fitriadi (2004 ) dengan judul “Perimetri berbasis Mikrokontroller “kemudian dikembangkan lagi oleh Andri Hermansyah (2006) dengan judul “Perimetri Berbasis PC “, namun alat tersebut system pengoperasiannya masih dalam satu control yaitu pada PC ( personal Computer). Disamping itu kondisi alat tersebut saat ini tidak berfungsi karena motor mekaniknya rusak.
Berdasarkan latar belakang masalah diatas, penulis ingin memperbaiki dan mengembangkan system pada alat perimetri
2
tersebut dengan menggunakan 2 kontrol danberbasis Mikrokontroller (Mekanik dan Tampilan LCD)”.
Batasan Masalah
1. Mikrokontroller menggunakan
ATmega16
2. Tampilan hasil berupa PC
3. Menggunakan tombol push botton
sebagai tanda adanya interupsi
4. Jarak letak pasien dengan alat ±30 cm. 5. Menampilkan grafik hasil pemeriksaan 6. Menggunakan serial komunikasi. Rumusan Masalah
Dapatkah dibuat alat perimetri berbasis mikrokontroller dengan tampilan PC (Personal Computer) dan kontrol pada PC (personal Computer)?
TUJUAN PENELITIAN 1) Tujuan Umum
Dibuat alat perimetri berbasis mikrokontroller dengan tampilan PC (Personal Computer) dan kontrol pada PC (personal Computer)
2) Tujuan Khusus
a. Memfungsikan Mikrokontroler sebagai pengolah data dan serial communication dengan PL2303.
b. Membuat software pada pemograman AVR Code Vision sebagai pengolah data ADC.
c. Membuat software pada pemrograman Delphi untuk control pada perimetri dan menampilkan hasil pembacaan luas pandang mata.
MANFAAT PENELITIAN 1) Manfaat Teoritis
a. Meningkatkan wawasan ilmu pengetahuan di bidang peralatan diagnostik, khususnya pada alat perimetri untuk melihat seberapa besar luas pandang manusia.
b. Sebagai refrensi selanjutnya bagi peneliti.
2) Manfaat Praktis
Dengan adanya alat ini diharapkan dapat membantu dokter dalam mendiagnosa seberapa luas jarak pandang penglihatan manusia dengan hanya melihat diagram grafik yang telah ditampilkan.
METODOLOGI
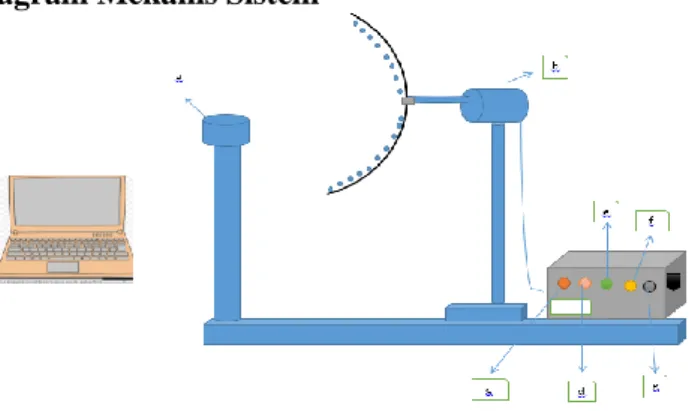
Diagram Mekanis Sistem
Gambar 3.1 Diagram Mekanis
Keterangan gambar
;
a : Penyangga Dagu Pasien
b. : Motor Stepper
c : UP
d : Down
e : Reset
f : Enter
g : Tombol Intrupsi
3
Diagram Blok Sistem
Gambar 3.2 Blok Diagram Sistem
Cara Kerja Blok Diagram
Keterangan Blok yang bertanda garis penuh akan dikerjakan oleh Novilia Harfiana dan yang bertanda garis putus-putus akan dikerjakan oleh izza Fahma Kusumawati.
Saklar ON ditekan sehingga tegangan dari PLN masuk rangkaian power supply untuk mengaktifkan semua rangkaian. Mikro ATmega16 berfungsi untuk mengaktifkan IC decoder 4514 dan 4515 dan matrik LED akan menyala, disamping itu Mikro ATmega16 juga aka mengakifkan driver motor sehingga motor dapat bergerak sesuai sudut yang ditentukan. Mode pemeriksaan mata kanan atau mata kiri digunakan untuk pemilihan mata yang akan diperiksa. Push button berfungsi sebagai tombol interupsi ketika pasien dapat melihat dengan jelas cahaya LED saat pemeriksaan. Hasil pemeriksaan ditampilkan melalui LCD, yang digunakan untuk diagnosa suatu penyakit mata manusia. Data hasil pemeriksaan akan ditampilkan pula pada personal komputer berupa grafik melalui serial komunikasi PL2303.
Diagram Alir Proses/Program
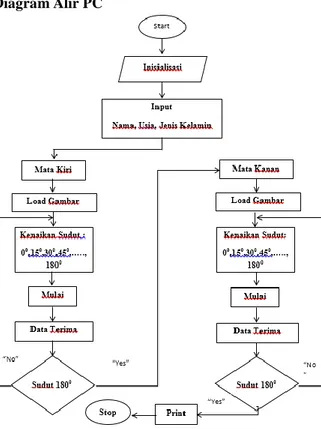
Diagram Alir PC
Gambar 3.3 Diagram Alir PC
Cara kerja diagram alir
Saat pertama kali program dijalankan, terjadi proses inisialisasi pada PC yang menghubungkan antara Software dengan hardware yang dihubungkan oleh USB TTL type PL2303. Pada proses ini motor servo berputar sejauh 1800 dan kembali keposisi awal. Selain itu, led juga akan menyala secara bergantian untuk memastikan bahwa pesawat siap untuk digunakan.
Proses pemeriksaan boleh dilakukan pada mata kiri atau mata kana terlebih dahulu, tergantung dari pasien atau operator. Sebelum melakukan proses pemeriksaan penulis menganjurkan melakukan pengisisan data pasien setelah selesai. Lakukan pemilihan pada mata yang akan diperiksa ialah mata kanan atau mata kiri, setelah pemilihan dilakukan, Misalkan pemeriksaan pada mata kiri terlebih dahulu. dengan
4
memilih sudut pandang yang diinginkan,maka hardware akan bergerak membentuk sudut tersebut mulai dari 00 sampai dengan 1650. Jika sudut yang dibentuk hardware telah maksimal, maka proses dilanjutkan lagi untuk pemeriksaan mata kanan. Proses pemeriksaan pada mata kanan hampir sama dengan pemeriksaan pada mata kiri, hanya saja setelah proses pemeriksaan selesai, maka hasil pemeriksaan keseluruhan akan tampil pada layar monitor.
Urutan Kegiatan
Dalam penelitian dan pembuatan modul ini penulis terlebih dahulu membuat urutan kegiatan yang meliputi dibawah ini :
1. Menpelajari teori tentang alat perimetri.
2. Berkonsiltasi kepada dosen – dosen yang bersangkutan mengenai permasalahan yang akan dibuat untuk Tugas Akhir.
3. Mengumpulkan referensi mengenai segala factor tentang penyakit glukoma yang di deteksi dengan alat perimetri
4. Membuat dan menyusun proposal. 5. Mempelajari masalah-masalah
tentang bentuk fisik modul, merancang teknis pembuatan modul.
6. Mem,buat mengumpulkan dan mempelajari rangkaian-rangakaian yang dibutuhkan untuk pembuatan modul
7. Membuat layout rangkaian perblock dalam PCB.
8. Mencetak layoutan dalam PCB serta memasang komponen-komponen yang sudah diasiapkan dan melakukan trouble shoot.
9. Melakukan pengukuran pada setiap test point.
10. Mempelajari dan membuat program.
11. Uji coba rangkaian keseluruhan.
12. Penggabungan seluruh rangkaian dan program yang dibuat.
13. Merancang box penempatan rangkaian sesuai kapasitas.
14. Penyusunan rangkaian pada box modul.
15. Melakukan pengukuran dan uji coba alat.
16. Pengambilan data pada setiap pasien.
PENGUJIAN DAN PEMBAHASAN Teknik Pengujian dan Pengukuran
1. Perancangan Penelitian
Rancangan penelitian model alat ini menggunakan metode pre-eksperimental dengan jenis penelitian After Only Design. Pada rancangan ini, peneliti hanya melihat hasil tanpa mengukur keadaan sebelumnya. Tetapi disini sudah ada kelompok control, walaupun tidak dilakukan rendomisasi. Kelemahan dari rancangan ini adalah tidak tahu keadaan awalnya, sehingga hasil yang didapat sulit disimpulkan. Desain dapat digambarkan sabagai berikut:
X O
Non Random
( - ) O X = Reatmen/perlakuan yg diberikan (variabel Independen)
0 = Observasi (variabel dependen) ( - ) = Kelompok control
Hasil Pengukuran
Rangkaian Driver Motor Stepper digunakan untuk menjalankan motor stepper dengan cara memberikan logika pada input driver motor stepper.
5
Tabl e .1 hasil outp ut pada peng uat trans istor D31 3 perta ma D ari data diat as dapat diketahui bahwa basis pada transistor tipe C3013 mengalami saturasi ketika mendapatkan tegangan diatas 0.7, sedangkan pada collector transistor tipe D313 yang merupakan outputan dari transistor menunjukkan tegangan sekitar rata-rata 4.89667 VdcTable.2 Hasil output pada penguat transistor D313 kedua
No. putaran V in V out
1. 0 7.62 4.83 2. 15 7.62 5.16 3. 30 7.62 4.78 4. 45 7.62 5.05 5. 60 7.62 5.17 6. 75 7.62 4.91 7. 90 7.62 4.83 8. 105 7.62 4.6 9. 120 7.62 4.7 10. 135 7.62 4.8 11. 150 7.62 5.1 12. 165 7.62 4.87 Rata-rata 7.62 4.9
Dari data diatas dapat diketahui bahwa basis pada transistor tipe C3013 mengalami saturasi ketika mendapatkan tegangan diatas 0.7, sedangkan pada collector transistor tipe D313 yang merupakan outputan dari transistor menunjukkan tegangan sekitar rata-rata 4.9 Vdc
Table.3 hasil output pada penguat transistor D313 ketiga
No. Putaran V in V out
1. 0 7.63 4.8 2. 15 7.63 4.3 3. 30 7.63 4.74 4. 45 7.63 4.9 5. 60 7.63 4.49 6. 75 7.64 4.8 7. 90 7.63 4.73 8. 105 7.63 4.8 9. 120 7.63 5.08 10. 135 7.63 5.48 11. 150 7.64 5.01 12. 165 7.63 4.83 RATA-RATA 7.631667 4.83
Dari data diatas dapat diketahui bahwa basis pada transistor tipe C3013 mengalami saturasi ketika mendapatkan tegangan diatas 0.7, sedangkan pada collector transistor tipe D313 yang merupakan outputan dari transistor menunjukkan tegangan sekitar rata-rata 4.83 Vdc
Table.4 hasil output pada penguat transistor ke empat
No. Putaran V in V out
1. 0 7.63 4.46 2. 15 7.64 4.83 3. 30 7.64 4.68 4. 45 7.63 4.30 5. 60 7.64 4.47 6. 75 7.64 4.9 7. 90 7.63 4.31 8. 105 7.64 4.48 9. 120 7.63 4.83 10. 135 7.63 4.68
No. Putaran V in V out
1. 0 7.63 5.08 2. 15 7.63 5.11 3. 30 7.63 4.5 4. 45 7.63 4.7 5. 60 7.63 5.11 6. 75 7.64 4.8 7. 90 7.63 4.8 8. 105 7.63 4.83 9. 120 7.63 4.8 10. 135 7.62 4.8 11. 150 7.62 5.11 12. 165 7.62 5.12 RATA-RATA 7.62833 4.89667
6
11. 150 7.63 4.27
12. 165 7.63 4.78
RATA-RATA 7.634167 4.5825
Dari data diatas dapat diketahui bahwa basis pada transistor tipe C3013 mengalami saturasi ketika mendapatkan tegangan diatas 0.7, sedangkan pada collector transistor tipe D313 yang merupakan outputan dari transistor menunjukkan tegangan sekitar rata-rata 4.5825 Vdc.
Rangkaian decoder terdiri dari IC decoder 4514 dan 4515, kedua IC ini memiliki cara kerja yang berbeda, untuk IC decoder tipe 4514 akan aktif jika mendapat logika high sedangkan untuk ic tipe 4515 akan aktif jika mendapat logika low.
- Hasil pegukuran dari kondisi nyala LED yang berbeda dengan kelipatan 10.
Table.5 hasil output pada penguat IC decoder 4514 dan 4515
Hasil perhitungan pada setiap responden
Hasil dari keseluruhan
LED KE- PORT C.0 – C.7 C7 C6 C 5 C4 C3 C2 C1 C0 10 0 0 0 0 1 0 0 1 20 0 0 0 1 0 0 1 1 30 0 0 0 1 1 1 0 1 40 0 0 1 0 0 1 1 1 50 0 0 1 1 0 0 0 1 60 0 0 1 1 1 0 1 1 70 0 1 0 0 0 1 0 1 80 0 1 0 0 1 1 1 1 90 0 1 0 1 1 0 0 1 100 0 1 1 0 0 0 1 1 110 0 1 1 0 1 1 0 1 120 0 1 1 1 0 1 1 1 130 0 0 0 0 0 0 0 1 140 1 0 0 0 1 0 1 1 150 1 0 0 1 0 1 0 1 160 1 0 0 1 1 1 1 1 170 1 0 1 0 1 0 0 1 180 1 0 1 1 0 0 1 1
7
Mata KananTable 6 Hasil pemeriksaan mata kanan
Nama 1 2 3 Rata-Rata PC PC PC PC Responden1 71.6% 75.4% 75.6% 74.2 Responden 2 59% 54.9% 59% 57.63 Responden 3 71.3% 59% 63.1% 64.8 Responden 4 54.9% 42.6% 42.6% 46.7 Responden 5 54.9% 54.9% 63.1% 57.63 Mata Kiri
Table 7 Hasil pemeriksaan mata kanan
Nama 1 2 3 Rata-Rata PC PC PC PC Responden1 54.9 59% 59% 57.63 Responden 2 71.2% 59% 63.1% 64,43 Responden 3 83.6% 71.3% 46.7% 67.2 Responden 4 50.8% 50.8% 54.9% 52.16 Responden 5 50.8% 50.8% 63.1% 54.9
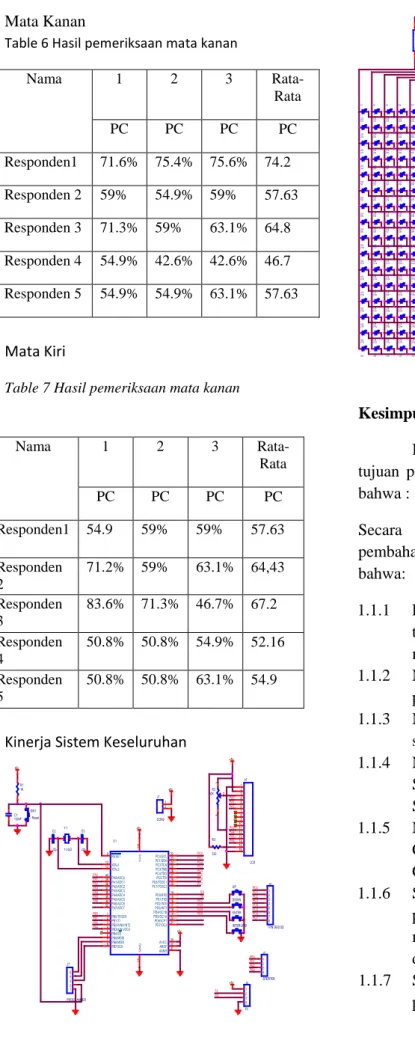
Kinerja Sistem Keseluruhan
Kesimpulan
Berdasarkan hasil pembahasan dan tujuan pembuatan modul dapat disimpulkan bahwa :
Secara menyeluruh penelitian ini Dari pembahasan diatas, dapat disimpulkan bahwa:
1.1.1 Pada rangkaian minimum system, tegangan kerja yang dibutuhkan maksimum 5 VDC
1.1.2 Menggunakan Atmega 16 sebagai pengolahan data.
1.1.3 Menggunakan Mikrokontroler sebagai pengolahan data
1.1.4 Menggunakan PL2302 sebagai Serial Komunikasi antara Minimum System sengan PC
1.1.5 Menggunakan Delphi7 sebagai Control dan Data yang diterima pada Chart.
1.1.6 Setelah dilakukan pengolahan program untuk motor stepper, mampu menggerakka motor stepper dengan kenaikan sudut 15°
1.1.7 Setelah dilakukan pengolahan program untuk driver LED, mampu PA4 PA0 PA0 DOWN PB1 PA5 PD4 PA3 PC7 PD3 PA4 R2 50K 1 3 2 INTERUPSI +5v PC5 +5v PC2 RX PB1 PB3 PB2 PA5 PC6 PC0 PD5 +5v PC4 PA2 PA6 PA1 PC6 C3 22p PC3 +5v PB3 U1 16 4 28 36 19 9 27 38 29 6 22 33 1 20 40 34 8 17 3 14 32 5 13 26 18 37 24 2 39 23 35 25 21 7 15 12 30 31 10 11 PD2/INT0 PB3/AIN1/OC0 PC6/TOSC1 PA4/ADC4 PD5/OC1A RESET PC5/TDI PA2/ADC2 PC7/TOSC2 PB5/MOSI PC0/SCL PA7/ADC7 PB0/T0/SCK PD6/ICP1 PA0/ADC0 PA6/ADC6 PB7/SCK PD3/INT1 PB2/AIN0/INT2 PD0/RXD AREF PB4/SS XTAL1 PC4/TDO PD4/OC1B PA3/ADC3 PC2/TCK PB1/T1 PA1/ADC1 PC1/SDA PA5/ADC5 PC3/TMS PD7/OC2 PB6/MISO PD1/TXD XTAL2 AVCC AGND VC C GN D R3 220 +5v PB0 PB2 J8 PL 1 2 3 4 J7 PROGRAMMER 1 2 3 4 5 RX PB0 TX PD2 J5 STEPPER 1 2 3 4 PA3 PC7 UP PC0 PC2 J4 LCD 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 C1 100nF PA6 SW1 Reset PC4 PA1 ENTER J6 PIN DECOD 1 2 3 4 5 6 7 8 R1 1K PC1 Y1 11.052 C2 22p PA2 TX +5v PC1 PC3 PC5 J1 CON2 1 2 D143 LED D148 LED D38 LED D7 LED D42 LED D179 LED D156 LED 1K D60 LED D136 LED D71 LED D133 LED D6 LED D121 LED D123 LED 3 D87 LED D88 LED D70 LED D1 LED Q3 TIP120 D37 LED D99 LED D114 LED 7 D166 LED D45 LED D151 LED D182 LED R1 1K D173 LED D8 LED D2 DIODE D25 LED D164 LED +5 D142 LED D102 LED D82 LED R3 1K D127 LED D178 LED VCC D131 LED J4 CON2 1 2 D111 LED D69 LED D162 LED D18 LED D78 LED D76 LED D1 DIODE D118 LED D119 LED D9 LED R6 1K D90 LED D54 LED R9 1K R20 1K D29 LED D154 LED 7 D101 LED D167 LED D4 LED D80 LED D138 LED 2 D28 LED D35 LED 6 R17 1K D56 LED R13 1K D146 LED R11 1K D4 DIODE D181 LED D158 LED D172 LED 3 D110 LED D17 LED U3 DECODER 4514 232122123 11910876541817201914131615 D1D2D3D4STINH S0S1S2S3S4S5S6S7S8S9S10S11S12S13S14S15 D100 LED D160 LED R12 1K R2 1K D117 LED D24 LED D55 LED VCC D3 LED D30 LED D94 LED D171 LED D65 LED D16 LED D141 LED D169 LED D91 LED D46 LED D180 LED D40 LED D52 LED D128 LED D86 LED D108 LED R8 1K D84 LED TIP120 5 D26 LED D77 LED D64 LED D74 LED D13 LED D89 LED D137 LED D97 LED D59 LED D5 LED D150 LED 2 R7 1K TIP120 0 6 J2 DRIVER MOTOR 1 2 3 4 D174 LED D135 LED 1 J3 MOTOR 1 2 3 4 5 D51 LED R4 1K D12 LED D113 LED D34 LED D3 DIODE D44 LED D147 LED D130 LED D132 LED D67 LED D104 LED D93 LED TIP120 D10 LED D41 LED D98 LED D126 LED D124 LED R18 1K D106 LED R15 1K D112 LED D19 LED D122 LED TIP120 D75 LED D145 LED D85 LED D72 LED D73 LED D53 LED D2 LED D36 LED D161 LED D20 LED D57 LED D105 LED D170 LED TIP120 5 D140 LED D33 LED Q2 TIP120 R5 1K D163 LED VCC D144 LED D47 LED D153 LED D149 LED D68 LED D107 LED D157 LED 1 D155 LED D22 LED TIP120 D177 LED D81 LED R19 1K D39 LED D49 LED D159 LED D165 LED D139 LED U4 DECODER 4515 2 3 21 22 1 23 11 9 10 8 7 6 5 4 18 17 20 19 14 13 16 15 D1 D2 D3 D4 ST INH S0 S1 S2 S3 S4 S5 S6 S7 S8 S9 S10 S11 S12 S13 S14 S15 J3 CON2 1 2 D168 LED D50 LED D15 LED D120 LED D58 LED TIP120 D63 LED 4 R14 1K D23 LED D125 LED D109 LED D48 LED TIP120 +5 D11 LED 4 D152 LED D31 LED 8 D92 LED D61 LED D176 LED D66 LED D14 LED D116 LED D134 LED Q1 TIP120 D62 LED J1 DECODER 1 2 3 4 5 6 7 8 D32 LED D103 LED D175 LED D43 LED Q4 TIP120 D96 LED 8 D129 LED D95 LED D27 LED D115 LED D79 LED D21 LED R16 1K D83 LED
8
menyalakan LED secara bergantiandengan jumlah led sebanyak 182.
Secara umum dapat disimpulkan bahwa modul Modifikasi Perimetri dengan 2 Control (Personal Computer). Modul dapat di control menggunakan Delphi 7 dan hasil akan ditampilkan pada PC.
6.2 Saran
Pengembangan penelitian ini dapat dilakukan pada :
1. Adanya database dan penyimpanan data untuk memudahkan operator.
2. Diagnose penyakit sesuai dengangrafik
DAFTAR PUSTAKA
Hermansyah,Budi 2007. Perimetri berbasis PC Jurusan Teknik Elektromedik-Poltekkes Kemenkes, Surabaya
Fitriadi, Eko Yuli 2004. Perimetri berbasis mikrokontroller Jurusan Teknik Elektromedik-Poltekkes Kemenkes, Surabaya
Harmen, Dahlina 2009. Automated Perimetry . Fakultas Kedokteran Universitas Andalas
Warsito 1987. informasi praktis elektronika. Elek Media Komputindo.Jakarta.
Seri panduan pemograman, pemogramamn Borland Delphi 7 ( Jilid 1).
Rudi Tjahjadi MD2009.http://rudy-infokesehatan.blogspot.co.id/2009/07/glauko ma.html ( diakses pada tanggal 28 september 2015)