Sinkronisasi Sinyal RADAR Sekunder Untuk Multi Stasiun
Penerima Pada Sistem Tracking 3 Dimensi Roket
Wahyu Widada dan Sri Kliwati Lembaga Penerbangan dan Antariksa Nasional
Jln. Raya LAPAN Rumpin Bogor [email protected], [email protected]
Abstrak
Untuk melakukan tracking roket dengan menggunakan RADAR sekunder secara 3 dimensi maka sedikitnya diperlukan 3 buah stasiun penerima. Pada stasiun pertama sinkronisasi sinyal dapat langsung menggunakan signal RADAR yang dikirim dengan transmitter, akan tetapi untuk stasiun penerima kedua dan ketiga yang letaknya berjauhan akan sulit dilakukan sinkronisasi sinyal jika menggunakan pulsa tersendiri, dikarenakan memerlukan stabilisasi pembangkit pulsa yang sangat presisi. Untuk mengatasi persoalan tersebut, maka digunakan sinyal yang sama dengan yang dikirim, dengan menggunakan radio transmitter dan receiver pada frekuensi yang lain untuk mengirimkan dari stasiun pertama dan ke dua ke stasiun pusat. Pemrosesan sinyal ini dapat dilakukan pada tempat yang sama di stasiun pusat, sehingga menjadi lebih mudah. Dengan metoda ini dapat diperoleh hasil perhitungan jarak yang akurat pada masing-masing stasiun penerima.
Kata kunci: Sinkronisasi sinyal RADAR sekunder, stasiun penerima, tracking 3 dimensi roket.
1. PENDAHULUAN
Tracking roket peluncur satelit dalam 3 dimensi sangat diperlukan untuk memantau navigasi roket tersebut dalam mengorbitkan satelit sampai pada posisi yang dituju secara akurat. RADAR sekunder sedang dikembangkan untuk dapat melakukan tracking dalam 3 dimensi. Sistem tersebut memerlukan stasiun penerima minimal tiga tempat. Algoritma multilateration dan TDOA (Time Different
Of Arrival) dapat digunakan untuk memroses signal-signal tersebut menjadi koordinat 3 dimensi (lihat
gambar 1). Teknik sinkronisasi sinyal sangat penting, karena sangat mempengaruhi akurasi pengukuran TDOA masing-masing stasiun. Sinkronisasi dengan menggunakan sinyal yang sama, akan menjadi lebih terjamin akurasi pengukurannya.
Gambar 1. Sistem tracking 3 dimensi menggunakan RADAR sekunder.
WLAN
Receiver Station RADAR Receiver 1 RADAR Receiver 2
RADAR Receiver 2 Transponder
Sinyal RADAR yang di transmitter ini digunakan sebagai trigger pada digital osiluskup dan sinyal yang diterima dari receiver sebagai input sinyal. Sinkronisasi signal sulit dilakukan dengan menggunakan pulsa yang berbeda, hal ini memerlukan kestabilan yang tinggi, sehingga memerlukan metoda yang lebih mudah dan sederhana. Tulisan ini membahas metoda dan hasil percobaan sinkronisasi atau triggering masing-masing stasiun penerima dengan sinyal yang sama. Sinyal ini dikirim melalui radio transmitter untuk stasiun yang jauh dan menggunakan kabel coaxial untuk stasiun yang terjangkau oleh kabel. Hasil percobaan yang diperoleh menunjukkan bahwa metoda yang digunakan dapat selalu sinkron.
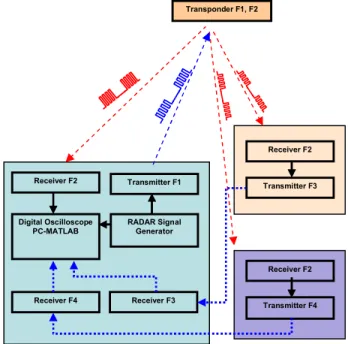
Gambar 2. Sinkronisasi signal pada masing-masing stasiun penerima menggunakan signal RADAR generator dari
stasiun transceiver (stasiun pusat).
2. DETEKSI SINYAL RADAR SEKUNDER
Bagan sistem sinkronisasi sinyal adalah seperti pada gambar 2 di atas. Stasiun pusat penerima signal RADAR mempunyai 3 buah radio penerima dengan frekuensi yang berbeda-beda, masing-masing menerima signal dari transponder, transmitter stasiun 2, dan transmitter stasiun 3.
Gambar 3. Prinsip pengukuran jarak berbasis delay pulsa RADAR sekunder.
Transponder F1, F2 Transmitter F1 Receiver F2 Receiver F2 Transmitter F3 Receiver F2 Transmitter F4 Digital Oscilloscope
PC-MATLAB RADAR SignalGenerator
Receiver F4 Receiver F3 Transceiver RADAR Pulse Payload rocket Transponder F1 MHz F2 MHz
Pada stasiun receiver utama delay signal hanya pada atmosphere saja, tetapi pada signal receiver 2 dan 3 ada delay tambahan dari signal stasiun tersebut ke stasiun utama. Untuk mendeteksi delay sinyal pada ketiga radio penerima tersebut, maka akan dijelaskan secara rinci sebagai berikut.
2.1 Sinkronisasi Stasiun Penerima-1
Signal pada masing-masing receiver, pada prinsipnya akan terjadi perubahan delay di atmosphere, sedangkan di bagian-bagian lain dianggap konstan. Oleh karena itu, pada setiap receiver tersebut perlu dijelaskan supaya mudah dimengerti.
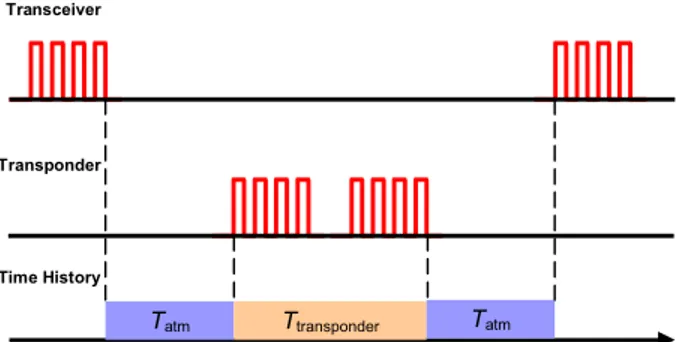
Gambar 4. Ilustrasi signal RADAR pada transceiver dan transponder serta perubahan delay waktu.
Ilustrasi perjalanan signal pada transceiver dan pada transponder sesuai dengan waktu adalah seperti pada gambar 4 di atas. Waktu yang diperlukan signal di hardware adalah konstan, sementara sesuai dengan jarak tempuh di atmosphere, maka waktu (Tatm) juga akan mengalami perubahan. Waktu total perjalanan
signal tersebut harus lebih panjang dari lamanya waktu pada window data akuisisi digital osiloskop, agar signal tetap terlihat satu buah saja. Hal itu untuk mempermudah perhitungan delay dan jaraknya.
Waktu yang diperlukan signal untuk pergi dan kembali lagi sampai tempat semula (round-trip) adalah sebagai berikut.
r transponde atm
tot T T
T 2 (1) Pada persamaan di atas Ttransponder adalah delay waktu yang dibutuhkan signal melalui transponder
(transmitter dan receiver). Jika pada saat jarak roket dianggap nol meter delay waktunya Ttot1dan setelah
berubah atau bertambah jauh delay waktunya Ttot2 , maka delay waktu di atmosphere dapat dihitung
dengan persamaan berikut.
) ( 1 2 1 tot tot atm T T T (2) Dari delay tersebut maka perubahan jarak dapat dihitung sebagai berikut.
2 1 1 C T D atm (3)
Disini C = 3×108 m/sec adalah kecepatan gelombang radio di atmosphere. Dengan menggunakan
persamaan di atas, maka secara kontinyu perubahan jarak adalah:
) ( ) ( 1 1 t D t S (4) Sedangkan perubahan kecepatan terhadap waktu t sebagai berikut:
Tatm Ttransponder Tatm
Transceiver
Transponder
dt t S t V () 1() 1 (5)
Dengan demikian, jarak dan kecepatan dapat dihitung dengan algoritma di atas, kedua parameter tersebut akan digunakan untuk menghitung koordinat posisi roket.
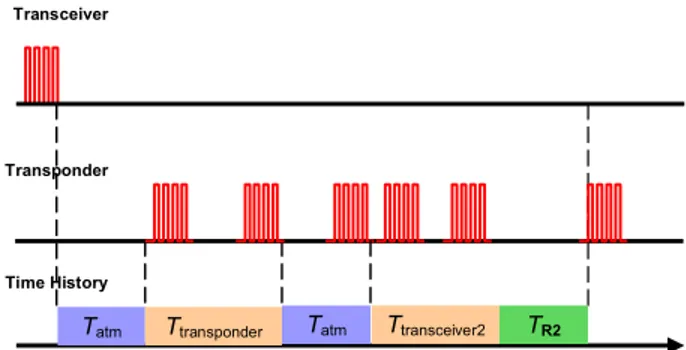
Gambar 5 Alur signal pada receiver kedua.
2.2 Sinkronisasi Stasiun Penerima-2
Untuk receiver ke 2, signal menjadi lebih panjang jalannya, transponder menjadi dua buah. Salah satu adalah transponder diam yang ada di stasiun penerima tersebut. Ilustrasi signal tersebut dapat kita gambarkan seperti pada gambar 5. Di sini TR2 adalah delay waktu yang terjadi karena jarak antara stasiun
ke dua dan stasiun pusat yang nilainya konstan. Total delay waktu yang diperlukan dapat ditulis sebagai berikut.
2 2
2 atm transponder transceiver
tot T T T
T (6) Seperti pada persamaan (2), maka jarak antara roket dengan stasiun ke 2 dapat dihitung sebagai berikut:
2 2 2 C T D atm (7)
Perubahan jarak terhadap waktu t ditulis menjadi persamaan berikut:
)
(
)
(
2 2t
D
t
S
(8) Sedangkan perubahan kecepatan seperti persamaan di bawah.dt t S t V () 2() 2 (9)
Sinyal yang mengalami perpindahan tempat, akan terjadi penurunan kualitasnya. Oleh karena itu perlu tambahan rangkaian analog untuk memperbaiki kualitasnya.
2.3 Sinkronisasi Stasiun Penerima-3
Mirip dengan stasiun penerima ke 2, signal pada stasiun ke 3 dapat diilustrasikan pada gambar di bawah. Jarak antara stasiun ke 3 dengan stasiun utama menyebabkan delay sebesar TR3. Total delay pada
stasiun utama dapat ditulis sebagai berikut:
3 3
2 atm transponder transceiver
tot T T T
T (10) Jarak antara roket dengan stasiun ke 3 adalah sebagai berikut:
Tatm Ttransponder Tatm
Transceiver
Transponder
Time History
2 3 3 C T D atm (11)
Kemudian perubahan jarak dan kecepatan terhadap waktu t dinyatakan dengan persamaan berikut:
) ( ) ( 3 3 t D t S (12) dt t S t V ( ) 3() 3 (13)
Dari persamaan (1) hingga (13) di atas, perjalanan signal dari signal generator dan kembali lagi ke tempat semula telah dijelaskan, sehingga jarak roket ke masing-masing stasiun penerima dapat diukur dengan akurat.
Gambar 6 Alur signal pada receiver ketiga.
3. HASIL PERCOBAAN
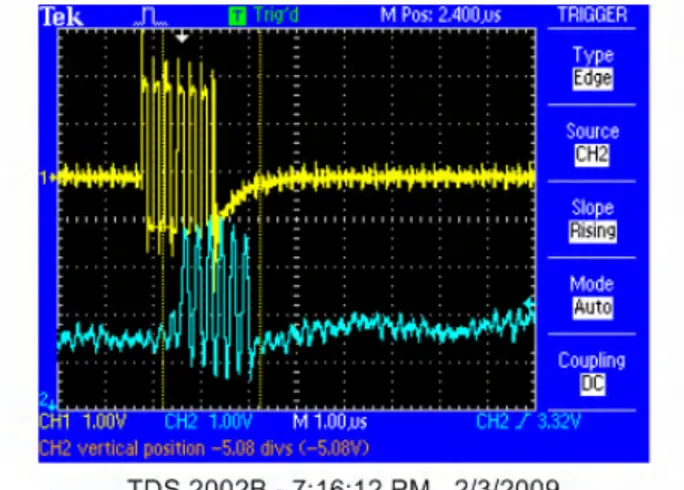
Percobaan dilakukan sesuai dengan bagan pada gambar 1 di atas. Radio yang digunakan adalah radio pada frekuensi 2.4 GHz dan sinyal yang dikirim mempunyai frekuensi 4 MHz dengan delay antar pulsa 50 µsec. Gambar 6 adalah sinyal yang dikirim dan sinyal yang diterima. Sinyal yng diterima terlihat pada bagian bawah.
Gambar 6. Signal yang dikirim (atas) dan yang diterima (bawah) dengan trigger signal atas.
Tatm Ttransponder Tatm
Transceiver
Transponder
Time History
Akusisi data menggunakan digital osiloskop tipe TDS2002B dari perusahaan Tektronix. Maksimum sampling data adalah 2500 data. Kecepatan akusisi secara total kira-kira 1 detik dengan komunikasi USB. Pada gambar tersebut sinyal yang diterima banyak mengandung noise dengan frekuensi yang lebih rendahdari 4 MHz. Oleh karena itu diaplikasikan analog signal processing untuk menambah stabil. Hal ini perlu dilakukan untuk meningkatkan akurasi deteksi jarak pada digital signal processing.
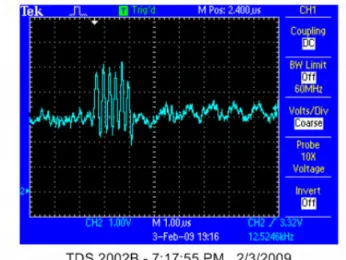
Gambar 7. Sinkronikasi dengan signal yang dikirim dari stasiun pertama.
Gambar 7 di atas adalah pengambilan data dari stasiun ke dua dengan sinkronisasi sinyal dari stasiun pertama. Sinyal tersebut tetap dapat terambil dengan stabil seperti pada gambar 2 (stasiun pertama). Dengan demikian, stasiun-stasiun yang lain yang letaknya berjauhan tetap dapat diproses dengan akurat. Dari metoda yang telah dijelaskan pada bab 2 serta dari percobaan ini dapat diperoleh hasil sinkronisasi sinyal, walaupun sumber sinyal generator kurang stabil. Sinyal generator ini hanya berbasis microcontroller yang stabil untuk perhitungan jarak.
4. KESIMPULAN
Telah dirancang dan dibahas mengenai metoda sinkronisasi signal RADAR sekunder untuk tiga lokasi stasiun penerima. Masing-masing delay signal pada setiap stasiun penerima hanya berubah karena jarak di atmosphere yang berubah. Metoda ini dapat digunakan untuk srinkronisasi signal seluruh stasiun penerima, sehingga dapat mengukur jarak dengan akurat. Perjalanan sinyal yang berpindah-pindah memerlukan rangkaian pengkondisian sinyal untuk meningkatkan akurasi sistem ini.
Daftar pustaka
[1]Wahyu Widada dan Sri Kliwati,”Develpment of Secondary Surveillance RADAR Rocket”, Seminar Nasional RADAR 2008.