Abstrak—Salahsatu proses yang penting untuk diperhatikan demi terjaganya kualitas proses yang lain hingga keluaran produk di industri gula adalah proses produksi uap dari stasiun ketel atau boiler. Variabel proses yang sangat mempengaruhi tingkat kualitas keluaran steam adalah level air di steam drum.
Namun demikian kinerja sistem pengendalian level yang ada belum bisa bekerja secara optimal bila terjadi disturbance dan load yang tinggi, disturbance diakibatkan oleh tekanan pompa feedwater yang besar menyebabkan level air disteam drum selalu berfluktuasi. Maka dari itu dirancanglah suatu sistem pengendalian level baru yang menggunakan 3 element kontrol mode PID pada penelitian ini. Pada penelitian ini, dilakukan perancangan sistem pengendalian level dan sistem interlock.
Untuk penentuan parameter kontrol PID yang dilakukan adalah dengan metode Ziegler-Nichols diperoleh nilai Kp=33,4; Ti=0,16 dan Td=0,04 pada primary loop dan Kp=1,37 ; Ti=0,535 dan Td=0,134 pada secondary loop. Kemudian dilakukan pengujian dan analisa sistem pengendalian level dan interlock dan didapatkan bahwa respon sistem pengendalian level dan interlock stabil dengan maximum overshoot (Mp) =12%, settling time (Ts)
= 982 detik, peak time (Tp) =345 detik, rise time (Tr) = 202 detik dan error steady state (Ess) = 0,2 %. Sedangkan respon yang dihasilkan oleh sistem interlock mengindikasikan trip bila level air melebihi batas atas maksimal sistem yang sudah ditentukan yaitu 0,9 meter dan kembali ke kondisi normal membutuhkan waktu 400 detik
Kata Kunci—Steam drum, Level, Interlock, PID
I. PENDAHULUAN
ALAM rangka proses revitalisasi yang dilakukan oleh PTPN X (Persero) terhadap pabrik gula di propinsi jawa timur yang bertujuan untuk meningkatkan kuantitas dan kualitas gula lokal di pasaran dalam negeri. Salahsatu proses yang penting untuk diperhatikan demi terjaganya kualitas proses yang lain hingga keluaran produk di industri gula adalah proses produksi uap dari stasiun ketel atau boiler.
Steam/uap di industri pembuatan gula digunakan dibanyak proses seperti sebagai penggerak mesin grinding di stasiun gilingan, menggerakkan turbin uap di stasiun pembangkit listrik, menggerakkan pompa-pompa mesin uap dan sebagai supply pemanas pada heater, proses evaporasi di stasiun penguapan dan proses pemasakan di stasiun masakan. Level air di steam drum senantiasa harus dijaga agar selalu sesuai set point yang ditentukan. Bila level air tidak terjaga dengan baik, maka drum bisa overheated yang bisa menimbulkan kebocoran pada pipa-pipa boiler bila level air terlalu rendah dan apabila
level air terlalu tinggi bisa berpengaruh pada steam yang dihasilkan masih mengandung uap air yang bisa menyebabkan korosif pada sudu-sudu turbin. Namun demikian kinerja sistem pengendalian level yang ada belum bisa bekerja secara optimal bila terjadi disturbance dan load yang tinggi, disturbance diakibatkan oleh tekanan pompa feedwater yang besar menyebabkan level air disteam drum selalu berfluktuasi. Load yang tinggi menyebabkan loss pressure didalam steam drum yang semuanya berpengaruh pada hasil produk proses yaitu kualitas steam. Selain itu belum optimalnya sistem safety yang digunakan karena masih menggunakan manual alarm dan manual shutdown. Maka dari itu konfigurasi tiga element kontrol berbasis PID yang dilengkapi sistem interlock level dan pressure dipilih untuk menggantikan satu element kontrol yang masih berbasis PI sebelumnya telah digunakan karena kinerjanya masih belum optimal untuk mengatasi masalah diatas.
II. URAIANPENELITIAN A. Alur Penelitian
Langkah-langkah yang dilakukan pada tugas akhir ini dapat dijelaskan melalui flowchart berikut.
Gambar 1 metodologi penelitian
PERANCANGAN SISTEM PENGENDALIAN LEVEL DAN INTERLOCK PADA STEAM DRUM DENGAN TIGA ELEMENT
KONTROL DI PG. GEMPOLKREP - MOJOKERTO
Muhammad Niqris Prihantya, Hendra Cordova, Ronny Dwi Noriyati
Jurusan Teknik Fisika, Fakultas Teknologi Industri, Institut Teknologi Sepuluh Nopember (ITS) Jl. Arief Rahman Hakim, Surabaya 60111 Indonesia
e-mail: [email protected], [email protected], [email protected]
D
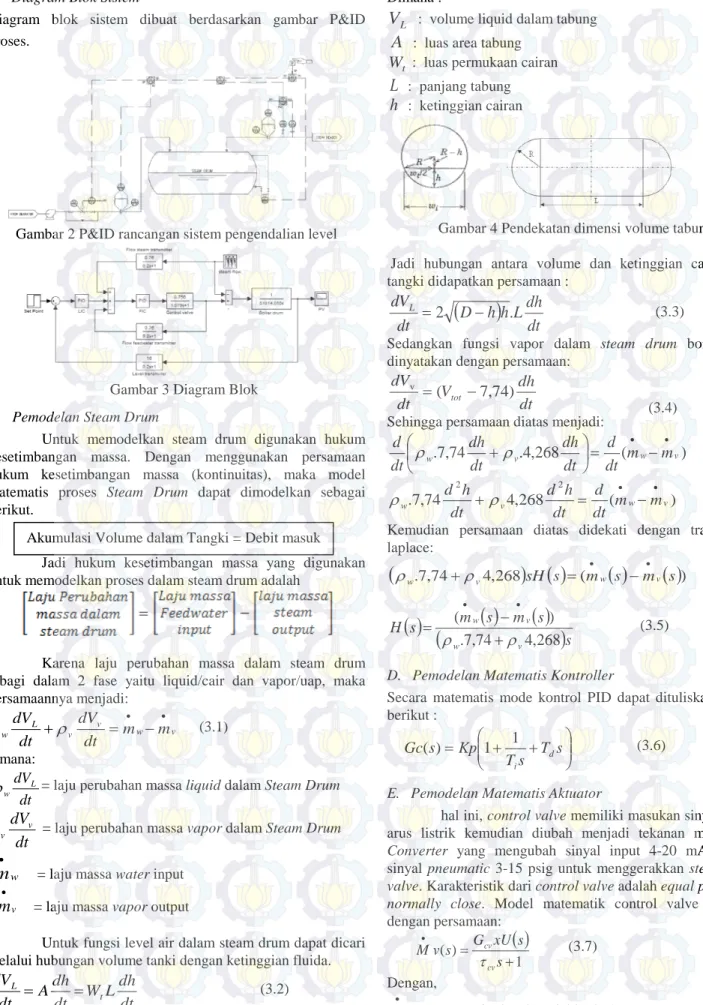
B. Diagram Blok Sistem
Diagram blok sistem dibuat berdasarkan gambar P&ID proses.
Gambar 2 P&ID rancangan sistem pengendalian level
Gambar 3 Diagram Blok C. Pemodelan Steam Drum
Untuk memodelkan steam drum digunakan hukum kesetimbangan massa. Dengan menggunakan persamaan hukum kesetimbangan massa (kontinuitas), maka model matematis proses Steam Drum dapat dimodelkan sebagai berikut.
Jadi hukum kesetimbangan massa yang digunakan untuk memodelkan proses dalam steam drum adalah
Karena laju perubahan massa dalam steam drum dibagi dalam 2 fase yaitu liquid/cair dan vapor/uap, maka persamaannya menjadi:
v w v v L
w m m
dt dV dt
dV • •
−
= + ρ
ρ
(3.1)dimana:
dt dVL
ρ
w = laju perubahan massa liquid dalam Steam Drumdt dVv
ρ
v = laju perubahan massa vapor dalam Steam Drumm
w•
= laju massa water input
m
v•
= laju massa vapor output
Untuk fungsi level air dalam steam drum dapat dicari melalui hubungan volume tanki dengan ketinggian fluida.
dt Ldh dt W
Adh dt dV
t
L
= =
(3.2)Dimana :
V
L : volume liquid dalam tabungA
: luas area tabung Wt : luas permukaan cairanL
: panjang tabungh
: ketinggian cairanGambar 4 Pendekatan dimensi volume tabung
Jadi hubungan antara volume dan ketinggian cairan pada tangki didapatkan persamaan :
( )
dt Ldh h h dt D
dVL
.
2 −
=
(3.3)Sedangkan fungsi vapor dalam steam drum boiler dapat dinyatakan dengan persamaan:
dt V dh
dt dV
tot
7 , 74 )
v
= ( −
(3.4) Sehingga persamaan diatas menjadi:
) (
268 , 4 . 74
, 7
.
v w vw m m
dt d dt dh dt
dh dt
d
=
•−
•
ρ + ρ
) (
268 , 4 74
, 7 .
2 2
v v w
w m m
dt d dt
h d dt
h
d • •
−
= +
ρ
ρ
Kemudian persamaan diatas didekati dengan transformasi laplace:
(
w.7,74 v4,268) ( )
sH s (mw( )
s mv( )
s)•
• −
= +
ρ
ρ
( ) ( ) ( )
( )
ss m s s m
H
v w
v w
268 , 4 74 , 7 .
) (
ρ
ρ +
= −
•
•
(3.5)
D. Pemodelan Matematis Kontroller
Secara matematis mode kontrol PID dapat dituliskan sebagai berikut :
+ +
= T s
s Kp T s
Gc d
i
1 1 )
( (3.6)
E. Pemodelan Matematis Aktuator
hal ini, control valve memiliki masukan sinyal berupa arus listrik kemudian diubah menjadi tekanan melalui I/P Converter yang mengubah sinyal input 4-20 mA menjadi sinyal pneumatic 3-15 psig untuk menggerakkan stem control valve. Karakteristik dari control valve adalah equal percentage normally close. Model matematik control valve diperoleh dengan persamaan:
( )
) 1
( = +
•
s s xU s G
v M
cv cv
τ (3.7) Dengan,
) (s v M
•
= Manipulated Variable (kg/s) Akumulasi Volume dalam Tangki = Debit masuk
= Sinyal masukan ke control valve (mA)
G
cv = Gain total Control Valve = Time konstan control valve (s)Time Constant efektif control valve diperoleh berdasarkan hubungan waktu stroke, perfreksional terhadap posisi valve dan perbandingan konstanta waktu inferent terhadap waktu stroke yang dinyatakan:
(
V)
V
CV
T V R
T = . ∆ +
(3.8) denganTCV = time constant control valve (dt)
TV = waktu stroke penuh (1,3 dt)
RV = perbandingan konstanta waktu inverent Sehingga pemodelannya menjadi:
( ) ( ) 1,079s + 1 0,756 s =
G s Ms
τ
F. Pemodelan Matematis Sensor dan Transmitter
• Flow Transmitter
Di dalam system pengendalian level steam drum, menggunakan dua buah sensor flow transmitter. Yaitu Feedwater keluaran dari Deaerator yang dialirkan menuju steam drum (FT-101A), dan yang kedua digunakan untuk mendeteksi laju aliran steam keluaran steam drum (FT- 102A). Sehingga pemodelannya menjadi:
• Level Transmitter
Level yang diukur oleh Level Transmitter adalah level atau ketinggian dari liquid yang terdapat pada steam drum. Level Transmitter yang digunakan merupakan jenis D/P transmitter, yang mentransmisikan signal sebesar 4-20 mA DC. Measurement length LT 0201 adalah ± 500 mm dan time konstan sebesar 0,2 detik, sehingga pemodelannya menjadi:
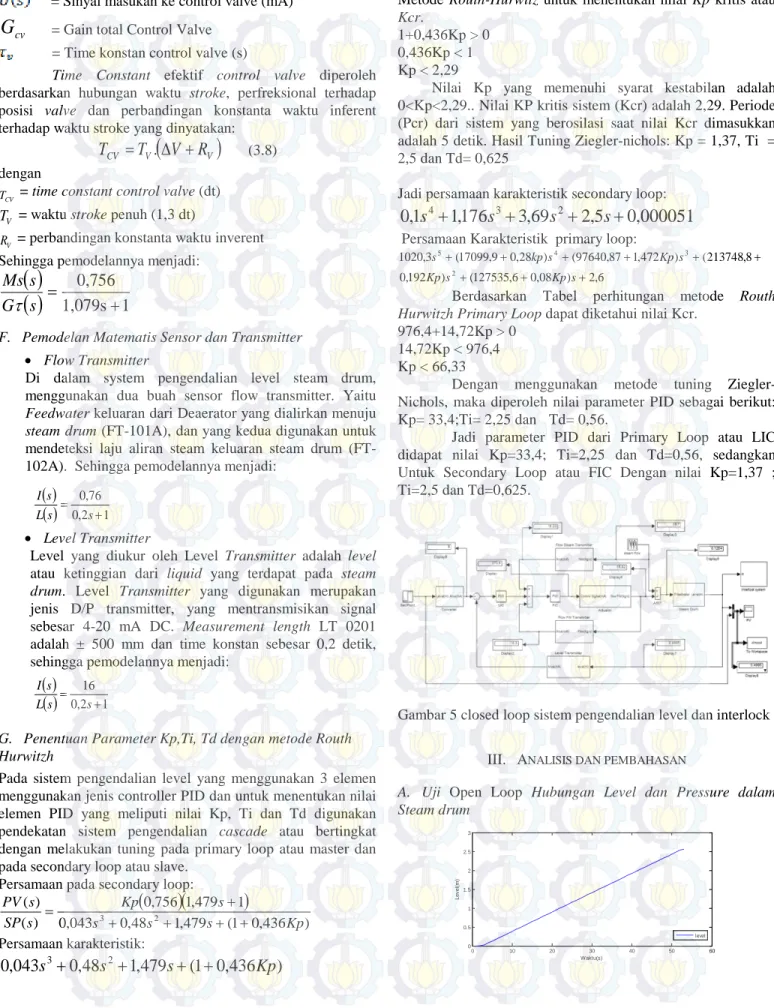
G. Penentuan Parameter Kp,Ti, Td dengan metode Routh Hurwitzh
Pada sistem pengendalian level yang menggunakan 3 elemen menggunakan jenis controller PID dan untuk menentukan nilai elemen PID yang meliputi nilai Kp, Ti dan Td digunakan pendekatan sistem pengendalian cascade atau bertingkat dengan melakukan tuning pada primary loop atau master dan pada secondary loop atau slave.
Persamaan pada secondary loop:
( )( )
) 436 , 0 1 ( 479 , 1 48 , 0 043 , 0
1 479 , 1 756 , 0 )
( ) (
2
3 s s Kp
s
s Kp
s SP
s PV
+ + +
+
= +
Persamaan karakteristik:
) 436 , 0 1 ( 479 , 1 48 , 0 043 ,
0 s
3+ s
2+ s + + Kp
Metode Routh-Hurwitz untuk menentukan nilai Kp kritis atau Kcr.
1+0,436Kp > 0 0,436Kp < 1 Kp < 2,29
Nilai Kp yang memenuhi syarat kestabilan adalah 0<Kp<2,29.. Nilai KP kritis sistem (Kcr) adalah 2,29. Periode (Pcr) dari sistem yang berosilasi saat nilai Kcr dimasukkan adalah 5 detik. Hasil Tuning Ziegler-nichols: Kp = 1,37, Ti = 2,5 dan Td= 0,625
Jadi persamaan karakteristik secondary loop:
000051 ,
0 5 , 2 69 , 3 176 , 1 1 ,
0 s
4+ s
3+ s
2+ s +
Persamaan Karakteristik primary loop:
6 , 2 ) 08 , 0 6 , 127535 ( ) 192 , 0
8 , 213748 ( ) 472 , 1 87 , 97640 ( ) 28 , 0 9 , 17099 ( 3 , 1020
2
3 4
5
+ +
+
+ +
+ +
+ +
s Kp s
Kp
s Kp s
kp s
Berdasarkan Tabel perhitungan metode Routh Hurwitzh Primary Loop dapat diketahui nilai Kcr.
976,4+14,72Kp > 0 14,72Kp < 976,4 Kp < 66,33
Dengan menggunakan metode tuning Ziegler- Nichols, maka diperoleh nilai parameter PID sebagai berikut:
Kp= 33,4;Ti= 2,25 dan Td= 0,56.
Jadi parameter PID dari Primary Loop atau LIC didapat nilai Kp=33,4; Ti=2,25 dan Td=0,56, sedangkan Untuk Secondary Loop atau FIC Dengan nilai Kp=1,37 ; Ti=2,5 dan Td=0,625.
Gambar 5 closed loop sistem pengendalian level dan interlock
III. ANALISIS DAN PEMBAHASAN
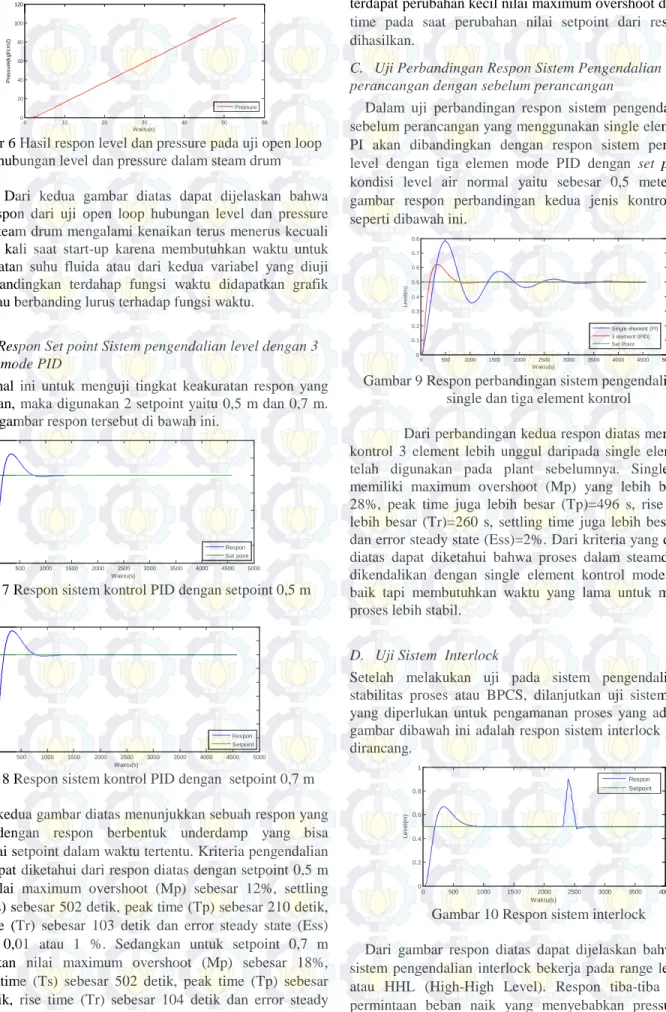
A. Uji Open Loop Hubungan Level dan Pressure dalam Steam drum
0 10 20 30 40 50 60
0 0.5 1 1.5 2 2.5 3
Waktu(s)
Level(m)
level
( ) ( )
0,2 1 16= + s s L
s I
( ) ( )
0,2 1 76 , 0= + s s L
s I
0 10 20 30 40 50 60 0
20 40 60 80 100 120
Waktu(s)
Pressure(kgf/cm2)
Pressure
Gambar 6 Hasil respon level dan pressure pada uji open loop hubungan level dan pressure dalam steam drum
Dari kedua gambar diatas dapat dijelaskan bahwa hasil respon dari uji open loop hubungan level dan pressure dalam steam drum mengalami kenaikan terus menerus kecuali pertama kali saat start-up karena membutuhkan waktu untuk peningkatan suhu fluida atau dari kedua variabel yang diuji dan dibandingkan terdahap fungsi waktu didapatkan grafik linier atau berbanding lurus terhadap fungsi waktu.
B. Uji Respon Set point Sistem pengendalian level dengan 3 element mode PID
Dalam hal ini untuk menguji tingkat keakuratan respon yang dihasilkan, maka digunakan 2 setpoint yaitu 0,5 m dan 0,7 m.
Berikut gambar respon tersebut di bawah ini.
0 500 1000 1500 2000 2500 3000 3500 4000 4500 5000
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7
Waktu(s)
Level(m)
Respon Set point
Gambar 7 Respon sistem kontrol PID dengan setpoint 0,5 m
0 500 1000 1500 2000 2500 3000 3500 4000 4500 5000
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
Waktu(s)
Level(m)
Respon Setpoint
Gambar 8 Respon sistem kontrol PID dengan setpoint 0,7 m Dari kedua gambar diatas menunjukkan sebuah respon yang stabil dengan respon berbentuk underdamp yang bisa mencapai setpoint dalam waktu tertentu. Kriteria pengendalian yang dapat diketahui dari respon diatas dengan setpoint 0,5 m yaitu nilai maximum overshoot (Mp) sebesar 12%, settling time (Ts) sebesar 502 detik, peak time (Tp) sebesar 210 detik, rise time (Tr) sebesar 103 detik dan error steady state (Ess) sebesar 0,01 atau 1 %. Sedangkan untuk setpoint 0,7 m didapatkan nilai maximum overshoot (Mp) sebesar 18%, settling time (Ts) sebesar 502 detik, peak time (Tp) sebesar 208 detik, rise time (Tr) sebesar 104 detik dan error steady state (Ess) sebesar 0,01 atau 1 %. Jadi bisa disimpulkan bahwa
terdapat perubahan kecil nilai maximum overshoot dan settling time pada saat perubahan nilai setpoint dari respon yang dihasilkan.
C. Uji Perbandingan Respon Sistem Pengendalian level hasil perancangan dengan sebelum perancangan
Dalam uji perbandingan respon sistem pengendalian level sebelum perancangan yang menggunakan single element mode PI akan dibandingkan dengan respon sistem pengendalian level dengan tiga elemen mode PID dengan set point pada kondisi level air normal yaitu sebesar 0,5 meter, berikut gambar respon perbandingan kedua jenis kontrol tersebut seperti dibawah ini.
0 500 1000 1500 2000 2500 3000 3500 4000 4500 5000
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8
Waktu(s)
Level(m)
Single element (PI) 3 element (PID) Set Point
Gambar 9 Respon perbandingan sistem pengendalian level single dan tiga element kontrol
Dari perbandingan kedua respon diatas memang jenis kontrol 3 element lebih unggul daripada single element yang telah digunakan pada plant sebelumnya. Single element memiliki maximum overshoot (Mp) yang lebih besar yaitu 28%, peak time juga lebih besar (Tp)=496 s, rise time juga lebih besar (Tr)=260 s, settling time juga lebih besar=3550 s dan error steady state (Ess)=2%. Dari kriteria yang disebutkan diatas dapat diketahui bahwa proses dalam steamdrum yang dikendalikan dengan single element kontrol mode PI sudah baik tapi membutuhkan waktu yang lama untuk menjadikan proses lebih stabil.
D. Uji Sistem Interlock
Setelah melakukan uji pada sistem pengendalian untuk stabilitas proses atau BPCS, dilanjutkan uji sistem interlock yang diperlukan untuk pengamanan proses yang ada. Berikut gambar dibawah ini adalah respon sistem interlock yang telah dirancang.
0 500 1000 1500 2000 2500 3000 3500 4000
0 0.2 0.4 0.6 0.8 1
Waktu(s)
Level(m)
Respon Setpoint
Gambar 10 Respon sistem interlock
Dari gambar respon diatas dapat dijelaskan bahwa respon sistem pengendalian interlock bekerja pada range level 0,9 m atau HHL (High-High Level). Respon tiba-tiba naik saat permintaan beban naik yang menyebabkan pressure dalam
steam drum tinggi juga sehingga menyebabkan fluida berfluktuasi melebihi batas atas aman level yaitu 0,9 m.
Respon berhenti diangka di titik level 0,9 menandakan bahwa plant tersebut trip/shutdown dibatas atas aman plant. Peristiwa seperti ini bisa disebabkan swell effect yang biasanya membuat fiksi level fluida dalam steamdrum sehingga sistem langsung trip/shutdown dengan otomatis. Kemudian Respon kembali ke kondisi awal atau normal yang mengindikasikan bahwa level kembali kondisi normal yang membutuhkan waktu 400 detik.
E. Pengujian Respon Perancangan Sistem
• Uji Tracking
0 500 1000 1500 2000 2500 3000 3500 4000 4500 5000
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7
Waktu(s)
Level(m)
Respon Setpoint
Gambar 11 Perbandingan respon uji tracking set point sistem Dari gambar diatas dapat dijelaskan dengan set point yang diubah-ubah yaitu 0,5 meter; 0,6 meter dan 0,4 meter dengan uji tracking set point, respon mengikuti kenaikan dan penurunan set point yang diberikan hanya terjadi perbedaan pada nilai maximum overshoot dan setling time. Pada saat set point dinaikkan respon memiliki setling time yang lebih lama dibandingkan dengan pada saat kondisi set point awal dan saat diturunkan, tetapi perbedaan setling time pada kenaikan dan penurunan begitu signifikan. Untuk keterangan respon uji tracking set point sistem pengendalian level ini dapat dilihat pada tabel 4.1 dibawah ini
Tabel 4.1 uji tracking set point (0,5 meter , 0,6 meter dan 0,4 meter)
Sp(m) Ts (s) Tr (s) Tp (s) Mp (%)
0,5 982 345 202 12
0,6 995 228 350 4
• Uji Beban
0 500 1000 1500 2000 2500 3000 3500
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7
Waktu(s)
Level(m)
sebelum setelah set point
Gambar 12 Respon sistem pengendalian level dengan uji penambahan beban dan disturbance
Dari gambar diatas respon yang dihasilkan dari uji penambahan beban pada proses tidak begitu banyak membuat perubahan pada proses, kecuali maximum overshoot lebih kecil yaitu sebesar 12%, settling time (Ts) lebih pendek yaitu sebesar 790 detik, peak time (Tp) sebesar 345 detik dan rise time sebesar 180 detik. Dari respon yang dihasilkan baik dari uji tracking maupun uji beban dan gangguan bisa disimpulkan bahwa jenis kontrol 3 element dengan mode PID sudah mampu mengatasi permasalahan yang biasanya terjadi di sistem pengendalian level dalam steam drum, dan memang merupakan keunggulan dari jenis kontrol ini adalah mampu mengatasi perubahan load dan disturbance secara kontinu.
IV. KESIMPULAN/RINGKASAN
Setelah melakukan perancangan sistem pengendalian level pada steam drum dengan 3 element kontrol di PG.
Gempolkrep Mojokerto dapat disimpulkan beberapa hal antara lain:
1. Respon yang dihasilkan oleh sistem pengendalian level dengan jenis 3 element mode PID yang telah dirancang mempunyai maximum overshoot (Mp) sebesar 12%, settling time (Ts) sebesar 982 detik, peak time (Tp) sebesar 345 detik, rise time (Tr) sebesar 202 detik dan error steady state (Ess) sebesar 0,002 atau 0,2 %
2. Respon yang dihasilkan oleh sistem interlock yang telah dirancang mengindikasikan trip bila level air melebihi batas atas maksimal sistem yang sudah ditentukan yaitu 0,9 meter dan kembali ke kondisi normal membutuhkan waktu 400 detik.
3. Dari semua pengujian yang dilakukan terhadap sistem pengendalian level jenis 3 element mode PID pada steam drum, semuanya menunjukkan tingkat kestabilan dengan nilai dan persentase tertentu. Jadi sistem pengendalian sudah cocok untuk diaplikasikan pada plant ini yang kondisi proses sangat dipengaruhi oleh disturbance dari pressure input dan permintaan beban yang tinggi.
DAFTARPUSTAKA
[1] Gunterus, Frans. 1994. Falsafah Dasar Sistem Pengendalian Proses, Elex Media Komputindo, Jakarta.
[2] Incropera, Frank P. 1996. Fundamentals of Heat and Mass Transfer: Fourth Edition, John Willy & Sons, Inc,USA.
[3] Abdurrahman, Wahid .2011. “Perancangan Sistem Pengendalian Level dan Interlock Steam drum Dengan Dua Elemen Kontrol Di PT. Indonesia Power UBP Sub Unit Perak”. Teknik Fisika, ITS
[4] Wahyudianto, Eko .2011. “Perancangan Sistem Pengendalian Bertingkat pada Steam Drum PT.
Indonesia Power UBP Sub Unit Perak-Grati”. Teknik Fisika, ITS
[5] Dery Dwi Hananto, "Perancangan Sistem Pengendalian Level pada HP Feedwater Heater dengan Metode Cascade dan Override di PT.IPMOMI, Paiton Jawa Timur”, Teknik Fisika, ITS
[6] Mihai Iacob and Gheorghe-Daniel Andrescu, “Drum- Boiler Control System Employing Shrink and Swell Effect Remission in Thermal Power Plants”, Dept. Of Automation and Apllied Informatics, Politecnica University of Timisoara –Romania
[1] Min Xu, Shaoyuan Li, Wenjian Cai, “Cascade Generalized Predictive Control Strategy for Boiler Drum Level”, Institute of Automation, Shanghai Jiao Tong university, Shanghai