7
LANDASAN TEORI
2.1. Sistem Kendali
Sistem Kendali atau control system terdiri dari dua kata yaitu system dan control. System berasal dari Bahasa Latin (systēma) dan bahasa Yunani (sustēma) adalah suatu kesatuan yang terdiri dari komponen atau elemen yang dihubungkan bersama untuk mencapai suatu tujuan tertentu. Control itu memiliki arti mengatur, mengarah dan mengendalikan. Jadi system control adalah hubungan antara komponen-komponen fisik yang membentuk suatu konfigurasi sistem sehingga memberikan hasil yang diharapkan. Hubungan antara input dan output pada sistem menunjukkan adanya hubungan sebab akibat dari sebuah proses, yang berawal dari input sampai bisa menghasilkan output. Maksud dari sistem kendali adalah menetapkan atau mendefinisikan input dan output. Jika input dan output telah ditentukan, maka memungkinkan untuk menetapkan atau mendefinisikan sifat dari komponen – komponen sistem tersebut.
2.1.1 Jenis-Jenis Sistem Kendali
Jenis-jenis sistem kendali terdiri dari 2 macam yaitu sistem untaian terbuka (open loop) dan sistem untaian tertutup (closed loop).
2.1.1.1 Sistem Untaian Terbuka (open loop)
Sistem kendali untaian terbuka adalah sebuah sistem yang tidak memiliki umpan balik (feedback), sehingga bila terdapat gangguan dari dalam maupun dari luar maka sistem tidak dapat melaksanakan tugas seperti yang diharapkan. Suatu sinyal masukan diberikan ke dalam sistem kendali dimana keluarannya bertindak sebagai sinyal penggerak dimana sinyal penggerak ini yang kemudian menghasilkan proses yang akan dikendalikan sehingga menghasilkan output yang diinginkan. Proses untaian terbuka dapat dilihat pada gambar 2.1.
Gambar 2.1 Sistem Pengendalian Untaian Terbuka
2.1.1.2 Sistem Untaian Tertutup (closed loop)
Sistem kendali untaian tertutup (closed loop) adalah sistem kontrol yang memiliki umpan balik, berbeda dengan sistem untaian terbuka. Pada bagian output dari sistem kontrol ini akan dikirim kembali untuk dibandingkan dengan input yang diberikan.
Bila masih terdapat selisih antara output dan input, maka sistem
masih memiliki error. Error merupakan selisih antara input dan output atau sistem belum mencapai hasil yang diinginkan. Proses kerja dari sistem untaian tertutup dapat dilihat pada gambar 2.2.
Gambar 2.2 Sistem Pengendalian Untaian Tertutup
2.2 Komunikasi Serial
Komunikasi serial merupakan salah satu jenis komunikasi antar device yang sering digunakan dalam pengiriman dan penerimaan data. Alat untuk mengirim data atau sinyal disebut Transmitter. Alat untuk menerima data atau sinyal dari transmitter disebut Receiver.
Komunikasi serial dibagi menjadi dua jenis mode pengiriman, yaitu sinkron dan asinkron. Mode sinkron merupakan mode pengiriman data dengan menggunakan clock sebagai sinkronisasinya, sehingga ketika mengirimkan data, transmitter akan men-sinkronisasikan pengiriman datanya dengan clock. Mode asinkron merupakan mode pengiriman data tanpa menggunakan sinkronisasi clock. Pada mode ini, pengiriman data harus menyepakati suatu standar yang telah disepakati agar transmitter dan receiver dapat terhubung. Standar yang
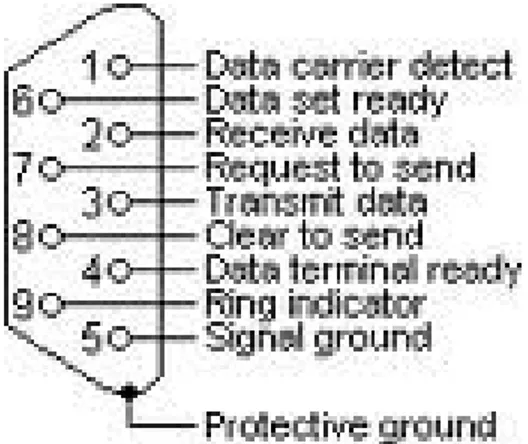
telah disepakati tersebut ialah Universal Asynchronous Receive Transmit (UART). Standar UART terdapat pada IC yang akan mengkonversi 8 bit data ke dalam jalur serial untuk dikirimkan pada receiver, begitu juga sebaliknya pada saat receiver menerima data dari serial, IC UART akan mengkonversi data serial kembali menjadi 8 bit data yang sebenarnya untuk diproses. Port yang terdapat pada serial dapat dilihat pada gambar 2.3
Gambar 2.3 Serial Port
Berikut merupakan fungsi port yang biasa digunakan pada pengiriman data secara serial:
1. RxD(Receive data)
Berfungsi untuk proses menerima data
2. TxD(Transmit Data)
Berfungsi untuk proses pengiriman data.
2.3 Frame
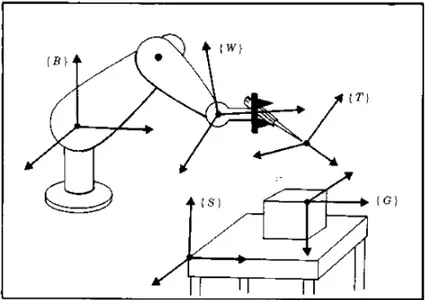
Berdasarkan (Craig, 1989, p99-101), terdapat beberapa istilah frame yang dipakai dalam bidang robotika seperti pada gambar 2.4 yaitu:
- Station Frame {S}
Frame yang merupakan tempat aktivitas dilakukan oleh robot, juga disebut Universal Frame. Pada frame ini pergerakan robot dibuat mengacu pada sistem koordinat-nya. Pada robot RV-M1 disebut platform.
- Base Frame {B}
Base Frame berada pada bagian dasar dari robot sering disebut frame{0}.
Bagian ini adalah poros dari robot.
- Wrist Frame {W}
Wrist Frame berada pada link terakhir manipulator, selalu mengikuti pergerakkan dan perpindahan dari link tersebut.
- Tool Frame {T}
Bagian yang terletak pada ujung dari robot disebut juga sebagai end effector.
End effector adalah alat yang melekat pada wrist, dibagi menjadi 2 kategori yaitu gripper dan tools. Pada RV-M1 digunakan jenis gripper yang digunakan untuk menjepit atau mengambil objek. Sedangkan tool digunakan untuk aplikasi pekerjaan seperti mengelas atau membor.
- Goal Frame {G}
Goal Frame adalah tujuan tempat dimana yang akan dituju oleh robot. Goal Frame ditetapkan mengacu pada Station Frame {S}.
Gambar 2.4 Frame (Craig, 1989)
2.4 Computer Vision
Computer Vision adalah teknologi yang berkaitan dengan pemahaman komputasi dan penggunaan informasi yang ada pada gambar visual. Tujuan dari computer vision terutama adalah untuk memungkinkan sistem rekayasa untuk memodelkan dan memanipulasi lingkungan dengan menggunakan pengindraan visual (McGraw-Hill, 2002)
2.4.1 Binary Image
Binary image adalah citra yang hanya terdiri dari dua nilai saja yaitu 1 dan 0 dimana 1 adalah warna putih dan 0 adalah warna hitam.
Terkadang ada yang menyebutnya 0 dan 255 (sebagai pengganti 1).
Sistem binary image masih sering digunakan dalam pemrosesan citra walaupun dengan berkembangnya teknologi banyak citra berwarna dan prosesor komputer yang berkembang pesat untuk pengolahan citra hal ini disebabkan binary image lebih cepat, mudah dan murah dalam pemrosesan citra dibandingkan dengan citra berwarna. Untuk binary image hanya diperlukan 1 bit saja sedangkan untuk grayscale image diperlukan 8 bit sehingga memori yang dibutuhkan untuk binary image lebih kecil seperdelapannya citra grayscale dalam pemrosesan citra.
2.4.2 Grayscale
Suatu citra grayscale adalah suatu citra yang hanya memiliki warna tingkat keabuan. Penggunaan citra grayscale dikarenakan membutuhkan sedikit informasi yang diberikan pada tiap pixel dibandingkan dengan citra berwarna. Warna abu-abu pada citra grayscale adalah warna R (Red), G (Green), B (Blue) yang memiliki intensitas yang sama. Sehingga dalam grayscale image hanya membutuhkan nilai intensitas tunggal dibandingkan dengan citra berwarna membutuhkan tiga intensitas untuk tiap pixelnya.
Intensitas dari citra grayscale disimpan dalam 8 bit integer yang memberikan 256 kemungkinan yang mana dimulai dari level 0 sampai dengan 255 (0 untuk hitam dan 255 untuk putih dan nilai diantaranya adalah derajat keabuan). Tingkat Keabuan atau Grayscale level dapat dilihat pada gambar 2.5.
Gambar 2.5 Grayscale level
2.4.3 Histogram
Histogram merupakan gambaran grafik dari sebaran data yang ada yang memperlihatkan perbedaan diantara data-data yang ada. Histogram dalam pengolahan citra dapat didefinisikan sebagai pemetaan yang menggambarkan distribusi intensitas pixel dari sebuah citra (graylevel, binary image, color image) dan didefinisikan seperti persamaan 2-1 dan 2-2:
histK =∑pixel dengan intensitas k (2-1) dimana nilai k adalah 0<=k<2b (2-2)
Dimana pada citra grayscale mempunyai level pixel dari 0 sampai 255 maka penyajian histogram akan menggambarkan distribusi frekuensi pixel dari rentang level 0 sampai 255 pada rentang grayscale. Karakteristik dari citra yang didapat bisa dilihat pada pmf (probability mass function) dengan melihat grayscale level- nya.
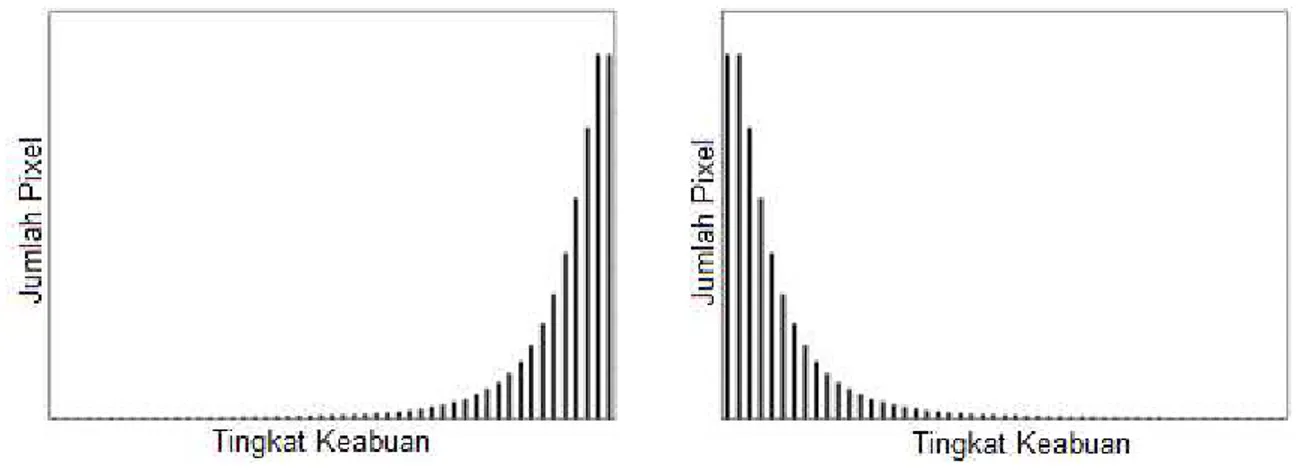
Gambar 2.6 yang mana pada 2.6(a) akan memperlihatkan histogram citra yang terang, sedangkan pada 2.6(b) akan memperlihatkan histogram citra yang gelap.
(a) (b)
Gambar 2.6 Histogram tingkat keabuan dari (a)citra terang dan (b)citra gelap.
2.4.4 Thresholding
Thresholding adalah salah satu metode pada pengolahan citra yang digunakan untuk menentukan batas atau ambang nilai intensitas
yang ingin, dalam hal ini perbedaan kontras antara background dan objek jelas yaitu hitam dan putih. Salah satu kegunaan dari thresholding ini adalah membantu di dalam proses segmentasi.
Setelah citra diubah ke dalam grayscale barulah citra bisa diberi nilai threshold agar dapat dipisahkan antara objek dan background-nya, lalu dibuat ketentuan antara objek dan background sesuai dengan ambang yang telah ditentukan.
Secara umum, thresholding dapat memberikan hasil maksimal bila puncak histogram tinggi/ sempit dan dipisahkan oleh lembah yang dalam seperti pada gambar 2.7.
Gambar 2.7 Historam tinggi / sempit
2.4.5 Sobel Filtering
Algoritma sobel adalah salah satu algoritma edge detection pada citra digital dengan basis nilai gradient. Algortima ini digunakan untuk
citra biner. Citra biner merupakan citra bernilai antara 0 dan 1 yang sering disebut binary image.
Algoritma Sobel memiliki operator konvolusi yang disebut juga sebagai operator sobel atau kernel sobel. Kernel ini berukuran 3x3 yang terdiri atas 2 buah kernel, untuk horisontal dan vertikal. Kernel tersebut dioperasikan secara konvolusi dengan pixel pada citra arah x dan arah y.
Algoritma sobel sering digunakan sebagai edge detecting algorithm tapi memiliki kekurangan. Kekurangannya adalah citra digital tidak dapat dilepaskan dari kehadiran derau. Masalahnya ada ketika citra ini dikonvolusikan dengan kernel sobel, yang terjadi adalah derau tersebut juga ikut di proses, sehingga derau menjadi bagian dari hasil algoritma sobel. Hal ini tentu tidak diharapkan, sehingga perlu adanya filter terhadap derau yang harus diberikan terlebih dahulu.
Filter yang sering digunakan adalah filter statistik, yaitu filter median.
Operator sobel bisa saja berukuran lebih dari 3, tetapi ada rumusan untuk itu karena dengan ukuran lebih besar maka diharapkan derau juga bisa dihilangkan. Sebaiknya juga gunakan ukuran ganjil, agar hasil konvolusinya didasarkan pada titik tengah dan operator memiliki titik tengah.
2.4.6 Centroid
Centroid dari suatu wilayah adalah titik pusat massa dari suatu wilayah atau benda. Centroid biasa digunakan untuk mencari titik pusat massa sebuah objek sehingga objek tersebut dapat diketahui pusat keseimbangannya sehingga saat objek akan dipindahkan atau diangkat dengan mengangkat pada titik pusat massanya maka keadaan objek akan seimbang.
Centroid dari sebuah wilayah untuk objek simetris seperti kotak atau lingkaran terletak pada tengah-tengah dari objek tersebut, tetapi tidak untuk objek yang lebih kompleks. Untuk objek yang lebih kompleks atau tidak beraturan bentuknya, letak centroid dikalkulasi dengan memecah objek tersebut menjadi objek yang lebih kecil.
Pada persamaan 2-3, xi dan yi merepresentasikan lokasi dari titik pusat massa untuk objek yang lebih kecil. Ai merupakan wilayah dari objek yang lebih kecil tersebut dan AT merupakan total wilayah dari keseluruhan objek.
(2-3)
Berikut merupakan contoh pencarian titik pusat massa untuk objek simetris dengan resolusi gambar 640x480 pixel dimana titik koordinat 0,0 berada di kiri atas dari ukuran gambar, untuk
mendapatkan titik pusat massa dari objek yang dideteksi maka dilakukan:
1. Proses edge detection searah horisontal untuk mendapatkan koordinat paling kiri objek dan koordinat paling kanan objek seperti pada persamaan 2-4 dan 2-5.
(2-4)
(2-5)
2. Proses edge detection dilakukan lagi searah vertikal untuk mendapatkan koordinat paling atas objek dan koordinat paling bawah objek seperti pada persamaan 2-6 dan 2-7.
(2-6)
(2-7)
3. Setelah kordinat-koordinat tersebut didapatkan, kemudian proses selanjutnya adalah mencari titik tengah antara titik paling kiri dengan titik paling kanan untuk mendapatkan koordinat titik pusat objek searah horisontal / sumbu x. Cara mendapatkan koordinat titik tengahnya adalah dengan menghitung selisih sisi paling kanan dengan paling kiri objek dibagi dua lalu dijumlahkan dengan koordinat sisi kiri dari objek dan hasilnya adalah seperti pada persamaan 2-8 dan 2-9.
(2-8)
Atau dapat disederhanakan menjadi
(2-9)
4. Kemudian untuk mencari titik pusat objek searah vertikal / sumbu y menggunakan cara perhitungan yang sama dengan perhitungan untuk mendapatkan titik koordinat sumbu seperti pada persamaan 2-10 dan 2-11.
(2-10)
Dapat disederhanakan menjadi
(2-11)
5. Maka didapatkan titik pusat dari objek adalah seperti pada persamaan 2-12
(2-12)
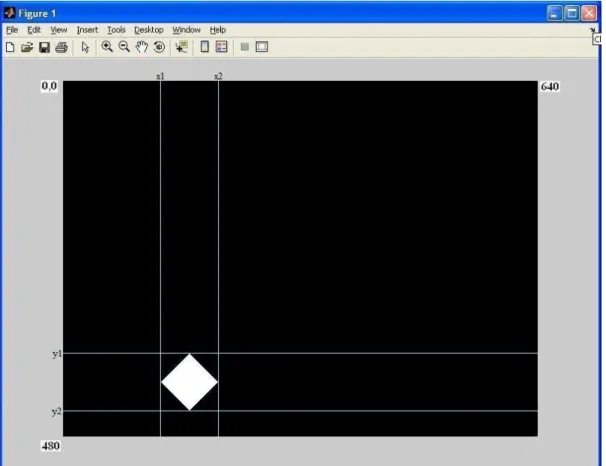
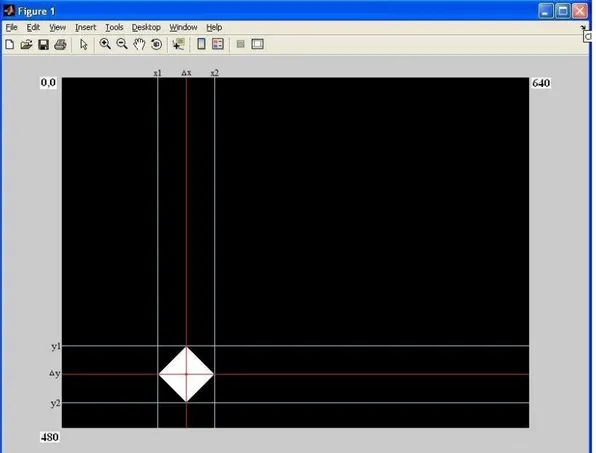
Gambar 2.8 Bounding box dari objek yang dideteksi
Gambar 2.8 merupakan ilustrasi dari proses pencarian titik pusat massa dari objek dengan menggunakan bounding box. Bounding box ini digunakan untuk mendapatkan titik pusat objek dengan membuat batas pada bagian objek yang bersinggungan dengan garis yang dibuat sejajar dengan sumbu x dan sumbu y.
Setelah nilai x1, x2, y1 dan y2 diketahui, maka dicari nilai untuk mengetahui titik koordinat dari pusat massa objek seperti pada gambar 2.9.
Gambar 2.9 Titik pusat yang didapat pada objek homogen
2.5 RV-M1
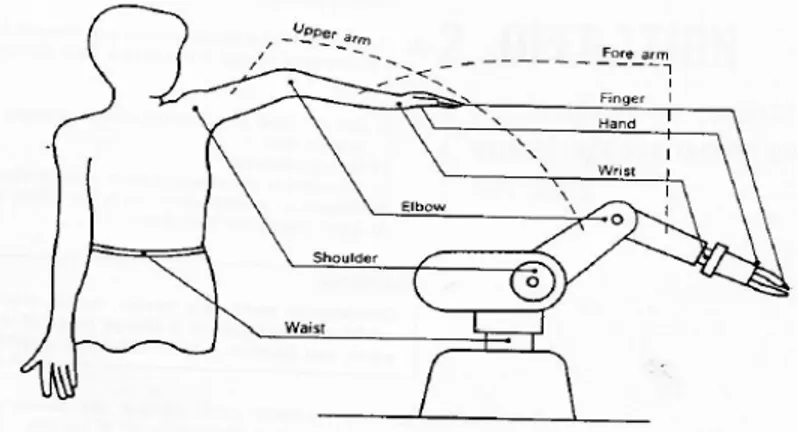
Lengan robot RV-M1 memiliki analogi yang sama dengan bagian lengan manusia yang sesungguhnya (gambar 2.10). Lengan robot terdiri atas beberapa joint dan link. Pada tubuh manusia, joint dapat dianalogikan sebagai persendian, sedangkan link sebagai tulang.
Gambar 2.10 Analogi Robot RV-M1 dengan lengan manusia (RV-M1 Manual, 1994)
Mitsubishi RV-M1 adalah sebuah fixed robot, mempunyai lima derajat kebebasan (degree of freedom) tidak termasuk gripper. Pergerakan dari robot hanyalah Spin dan Tilt, atau Wrist Roll and Wrist Angle.
Spin atau wrist roll adalah pergerakan rotasi dari end of gripper terhadap sumbu Z sedangkan Tilt atau wrist angle adalah sudut yang terbuat dari gripper dengan sumbu Z ketika berotasi dengan sumbu baru Y dari gripper.
Pergerakan lengan robot digerakan oleh sebuah electrical servo drive dengan menggunakan motor servo dc. Ditambah beberapa limit switch dan
sebuah sistem sinyal perubah yang menyediakan perintah untuk memeriksa pergerakan lengan robot.
Robot dapat diprogram dari sebuah serial atau pararel port dengan menggunakan bahasa robot yang sudah diset dan disimpan kedalam EPROM.
(http://people.vanderbilt.edu/~sameer.singh/docs/robottext.pdf)
Spesifikasi
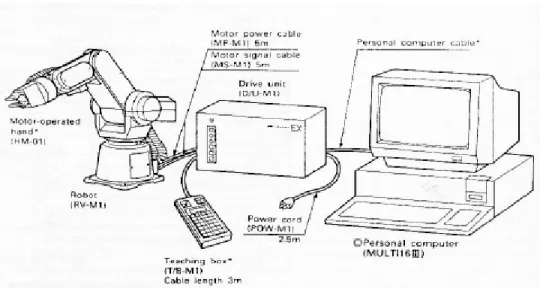
Konstruksi dari sistem robot terdiri dari lengan robot, komputer sebagai interface, sebuah teaching box serta sebuah drive unit yang berfungsi untuk menjalankan motor servo dc dan untuk memprogram EPROM secara baik (gambar 2.11).
Gambar 2.11 Spesifikasi Standar Sistem Penggerak RV-M1 (RV-M1 Manual Book, 1994)
Gambar 2.12 Fungsi Komponen Robot RV-M1 (RV-M1 Manual Book, 1994)
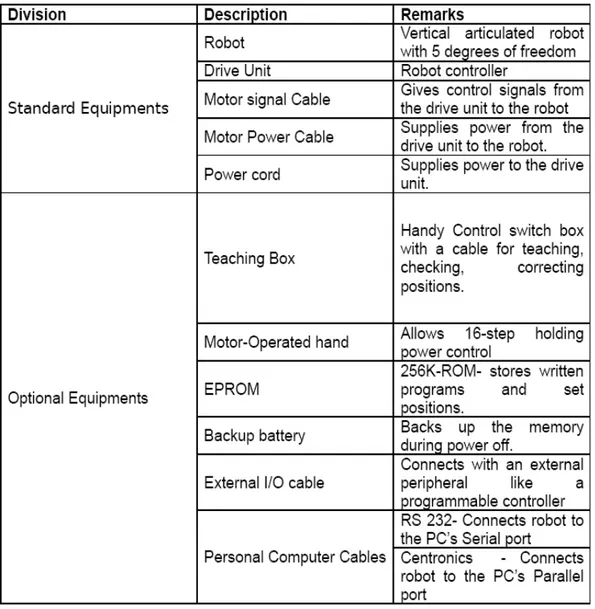
Gambar 2.12 merupakan fungsi dari komponen-komponen RV-M1 yang mendukung pergerakkan dari robot RV-M1. Komponen utama yang diperlukan adalah robot, drive unit yang merupakan kontroler dari robot, motor signal cable untuk mengirimkan data berupa sinyal dari kontroler ke robot, motor power cable untuk memberi suplai dari drive unit pada robot, dan Power cord untuk memberikan suplai listrik pada kontroler/drive unit.
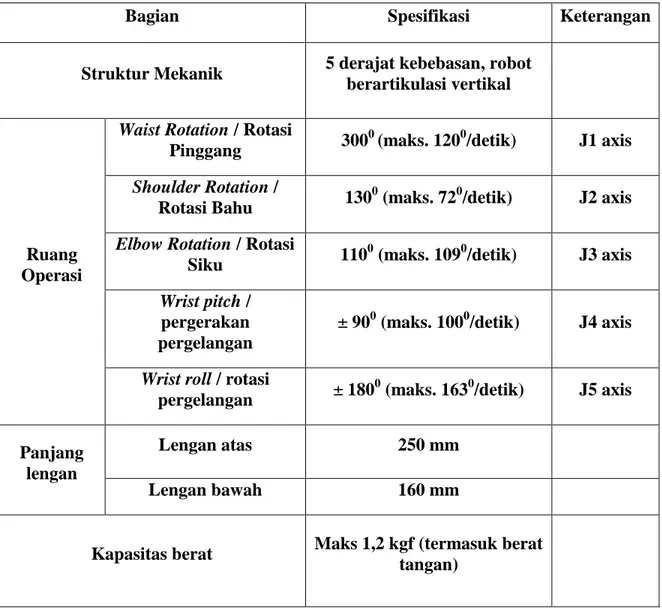
Tabel 2.1 Batasan dan spesifikasi robot RV-M1
Bagian Spesifikasi Keterangan
Struktur Mekanik 5 derajat kebebasan, robot berartikulasi vertikal
Ruang Operasi
Waist Rotation / Rotasi
Pinggang 3000 (maks. 1200/detik) J1 axis Shoulder Rotation /
Rotasi Bahu 1300 (maks. 720/detik) J2 axis Elbow Rotation / Rotasi
Siku 1100 (maks. 1090/detik) J3 axis Wrist pitch /
pergerakan pergelangan
± 900 (maks. 1000/detik) J4 axis
Wrist roll / rotasi
pergelangan ± 1800 (maks. 1630/detik) J5 axis
Panjang lengan
Lengan atas 250 mm
Lengan bawah 160 mm
Kapasitas berat Maks 1,2 kgf (termasuk berat tangan)
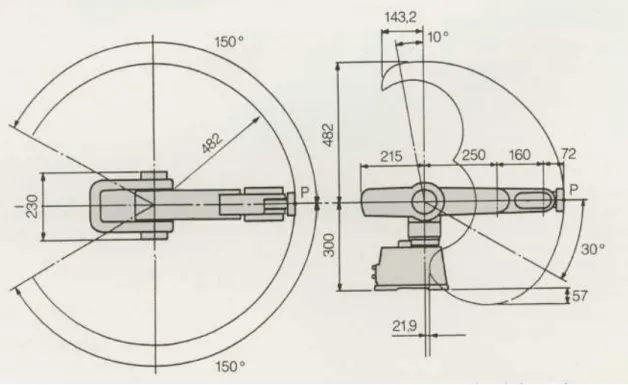
Tabel 2.1 adalah tabel yang memuat spesifikasi dan batasan dari robot RV-M1 seperti batasan gerak tiap joint dan batasan bobot berat yang dapat ditanggung oleh robot. Ruang gerak yang dimilki robot RV-M1 cukup luas dapat dilihat pada gambar 2.13 dan dimensi dari robot RV-M1 pada gambar 2.14.
Gambar 2.13 Wilayah Gerak Robot RV-M1 (RV-M1 Manual, 1994)
(a)
(b)
(c)
Gambar 2.14 Dimensi robot RV-M1, tampak atas (a), base plate / pondasi robot (b), tampak samping (c) (RV-M1 Manual, 1994)