PEMBANGUNAN
MOBILE ROBOT
DENGAN
SMARTPHONE
SEBAGAI SISTEM PENGENDALI GERAK
Laurensius D.S
Teknik Informatika - Universitas Widyatama, Bandung, Indonesia 40124
laurensius@3gen-itdev.com
ABSTRAK
Mobile robot yang dibangun adalah mobile robot beroda yang dapat dikendalikan menggunakan perangkat smartphone berbasis Android. Pengiriman instruksi dari smartphone ke mobile robot menggunakan dua kali transmisi yaitu menggunakan Bluetooth dan XBee . Mobile robot yang dibangun dilengkapi dengan kamera dan alat penjepit objek, serta memiliki roda yang mampu menjelajah berbagai medan. Microcontroller yang digunakan dalam pembangunan mobile robot ini digunakan ATMega2560 dan ATMega328P-PU yang telah dipaket menjadi development board DFRobot Mega 2560 ADK dan Arduino Duemilanove. Bahasa pemrograman yang digunakan adalah Java Android untuk pemrograman perangkat smartphone dan Wiring untuk pemrograman
controllernya. Tools yang digunakan untuk proses coding menggunakan Arduino SDK dan Eclipse IDE.
Mobile robot yang dibangun diharapkan dapat membantu manusia dalam menyelesaikan masalah yang sulit untuk dikerjakan oleh manusia seperti mengambil benda yang sulit untuk dijangkau oleh manusia dan memantau kondisi terdekat dengan mobile robot.
Kata Kunci : Mobile robot,Mobile Application, Wireless Communication, Interfacing System
1.
PENDAHULUAN
Robot adalah alat mekanik yang dapat melaksanakan tugas fisik dengan cara dikendalikan oleh manusia maupun dikendalikan oleh program atau kecerdasan buatan (Artificial Intelligence) yang ditanam pada sistem robot itu sendiri. Pada umumnya, robot digunakan pada dunia industri untuk mengerjakan pekerjaan berat, berbahaya dan pekerjaan yang berulang-ulang [1].Salah satu jenis robot yang cukup diminati pada saat ini adalah jenis robot yang dapat berpindah dari suatu tempat ke tempat lain (mobile robot) dan dapat dikendalikan dari jarak jauh. Kebutuhan akan robot yang dapat dikendalikan dari jarak jauh cukup diminati karena dianggap dapat membantu manusia dalam mengerjakan suatu aktivitas yang cenderung sulit dilakukan oleh manusia. Misalnya, penggunaan mobile robot yang dikendalikan dari jarak jauh untuk mengambil suatu objek dari suatu lokasi atau ruang yang cenderung sulit dijangkau oleh manusia [2]. Ketersediaan media penghantar perintah atau instruksi merupakan hal penting dalam penggunaan mobile robot yang dikendalikan dari jarak jauh. Penggunaan teknologi yang tepat diperlukan agar perintah dari pengendali dapat diterima dengan baik oleh robot, sehingga robot dapat melaksanakan instruksi yang dikirimkan oleh pengendalinya. Dalam melaksanakan tugasnya, tidak semua medan yang dilalui oleh mobile robot adalah jalur yang mudah untuk dilalui. Adakalanya jalur atau medan yang harus ditempuh oleh mobile robot adalah jalur yang tidak wajar, seperti bergelombang dan terdapat benda yang mengganggu mobilitas dari mobile robot. Di samping itu, untuk mengoptimalkan kinerja mobile robot yang dapat dikendalikan dari jarak jauh diperlukan media yang berfungsi untuk melihat kondisi atau situasi terdekat dengan robot. Hal ini diperlukan guna memberikan gambaran atau informasi secara visual di sekitar robot.
Sementara di lain sisi, perkembangan teknologi tidak pernah berhenti. Dalam beberapa tahun terakhir, perkembangan perangkat elektronika berkembang dengan pesat. Smartphone merupakan salah satu perangkat genggam yang mengalami perkembangan dengan pesat. Perkembangan teknologi smartphone tersebut tentunya tidak terlepas dari perkembangan operating system dari smartphone itu sendiri. Android merupakan salah satu
operating system yang mengalami perkembangan dengan cepat. Namun, ditinjau dari segi penggunaannya, penggunaan smartphone berbasis Android saat ini belum begitu optimal. Sebenarnya beberapa jenis smartphone
berbasis Android, memiliki keunggulan untuk dilakukan pengembangan lebih lanjut [3]. Berdasarkan kondisi tersebut, akan dilaksanakan perancangan dan pembangunan mobile robot yang dapat berjalan dalam berbagai macam medan dan memberikan informasi secara visual dari lokasi terdekat dengan robot dengan cara dikendalikan dari jarak jauh menggunakan perangkat berbasis Android secara nirkabel.
2.
LANDASAN TEORI
Mobile robot merupakan robot yang dirancang untuk dapat berpindah dari suatu tempat ke tempat lain, sehingga memiliki ruang kerja yang luas. Untuk dapat berpindah dari satu tempat ke tempat lain biasanya mobile robot menggunakan roda, jalur atau track, ataupun kaki. Untuk penjelasan lebih detail mengenai mobile robot
dapat dilihat di referensi nomor [2].
Pembangunan mobile robot pada kegiatan tugas akhir ini digunakan microcontroller ATMega 2560 yang telah dipaket menjadi sebuah development board DFRobot Mega ADK 2560. Sedangkan untuk router sebagai penghubung koneksi dari user ke mobile robot digunakan microcontroller ATMega 328P-PU yang telah dipaket menjadi development board Arduino Duemilanove. Microcontroller ATMega 2560 dan Microcontroller ATMega 328P-PU merupakan microcontroller yang diproduksi oleh Atmel, Inc. Perbedaan yang terlihat jelas dari kedua
microcontroller ini terletak pada bentuk dan jumlah pinnya. Pin yang dimiliki oleh ATMega 328P-PU berjumlah 28 buah, sedangkan ATMega 2560 memiliki pin sebanyak 100 buah. Seluruh penjelasan mengenai susunan dan fungsi dari setiap pin dari kedua microcontroller tersebut dapat dilihat di referensi nomor [5].
Development board Arduino merupakan rangkaian elektronika yang terdiri dari microcontroller dan komponen elektronika lainnya yang berfungsi untuk memudahkan proses pengembangan perangkat keras, dimana pada board ini telah disediakan Port-port untuk memudahkan para pengembang, dengan penggunaan development board Arduino, penggunanya tidak perlu melakukan proses soldering terhadap komponen IC dan komponen lainnya, dengan perangkat ini pengguna tinggal melakukan konfigurasi atau pemilihan pin mana saja yang akan pakai dan memprogramnya dengan SDK yang telah disediakan, yaitu Arduino SDK. Arduino dikembangkan oleh David Cuartielles dan Massimo Banzi beserta rekannya. Arduino Duemilanove merupakan salah satu varian dari produk Arduino. Development board DFRobot Mega ADK 2560 merupakan salah satu produk development board
selain Arduino. DFRobot Mega ADK 2560 dikembangkan oleh tim DFRobot. Produk development board ini memiliki fungsi seperti produk Arduino. Informasi lebih lanjut mengenai penjelasan Arduino dan berbagai varian
Arduino dapat diperoleh di referensi [6], sedangkan untuk penjelasan lebih lanjut mengenai DFRobot Mega ADK
dapat dilihat di referensi [7].
Dalam pembangunan robot ini digunakan Bluetooth sebagai perangkat pengirim instruksi secara nirkabel dari user ke mobile robot. Bluetooth yang digunakan merupakan Bluetooth yang dikembangkan oleh tim DFRobot
dengan nama DFRobotBluetooth v.3. Selain penggunaan Bluetooth untuk mengirim instruksi dari user ke mobile robot dipergunakan juga XBee Series 2 (S2). XBee merupakan protokol komunikasi nirkabel yang berkerja pada standarisasi 802.15.4. Untuk penjelasan lebih lanjut mengenai DFRBluetooth v.3 dapat dilihat di referensi nomor [8], sedangkan penjelasan untuk XBee S2 dapat dilihat di referensi nomor [9] .
3.
PROTOTYPE
Proses kegiatan tugas akhir ini dikembangkan dengan menggunakan metode prototyping. Kegiatan yang terjadi pada saat berlangsungnya kegiatan tugas akhir tersebut dijabarkan dalam poin 3.1 sampai dengan 3.3.
3.1
Prototype
Pertama
Media penghantar diperlukan agar mobile robot dapat menerima instruksi atau perintah yang dikirimkan oleh user atau pengendalinya. Maka dari itu untuk memenuhi kebutuhan tersebut diperlukan analisis terhadap proses pengiriman instruksi dari user ke controller pada mobile robot untuk selanjutnya instruksi tersebut diolah dan dikerjakan oleh mobile robot.
Pada prototype pertama dirancang sebuah perangkat lunak sederhana untuk controller pada mobile robot
agar dapat menerima instruksi dari user. Pada prototype pertama, instruksi yang dikirimkan oleh user masih sederhana, yakni melalui sebuah kabel USB FTDI. Kabel USB FTDI ini akan mengirimkan instruksi dari user
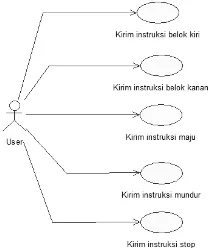
yang dikirimkan dari PC menggunakan serial terminal. Perancangan use case dapat dilihat pada Gambar 1 Use Case Prototype Pertama.
Mobile robot yang dikembangkan pada prototype pertama hanya terdiri dari alat gerak berupa roda
caterpillar (Tank) yang digerakkan oleh 2 buah motor DC yang terhubung dengan motor driver untuk mengatur pulsa elektroniknya (PWM, Pulse Width Modulation).
Dari hasil pengujian yang dilakukan, perangkat lunak yang ditanam pada mobile robot dapat menerima data yang dikirim dari PC melalui kabel USB. Pada prototype pertama, mobile robot hanya dapat bergerak maju, mundur dan berbelok. Kendala terjadi ketika user mengirimkan instruksi untuk berbelok ke kiri dan ke kanan.
mobile robot mengalami kesulitan karena pengaturan PWM yang tidak tepat. Dari hasil pengujian tersebut untuk sementara bahwa mobile robot diperlukan analisis dan perancangan lebih lanjut untuk menyelesaikan permasalahan yang diperoleh dari proses pengujian.
3.2
Prorotype
Kedua
Berdasarkan pengujian prototype pertama diperoleh hasil bahwa instruksi dapat diterima dengan baik oleh mobile robot, namun untuk alat gerak mengalami kendala manakala mobile robot hendak berbelok karena pengaturan PWM yang tidak tepat. Untuk mewujudkan tujuan yang diharapkan dalam pembangunan mobile robot
ini, maka pada prototype kedua dilakukan perubahan untuk pengiriman instruksi, pengiriman instruksi dilakukan oleh user dari perangkat smartphoneAndroid melalui koneksi Bluetooth.
Struktur pada mobile robot pun dirancang kembali dan ditambahkan alat gerak lain, yakni berupa gripper
atau alat gerak yang berfungsi untuk penjepit objek. Gripper digerakkan dengan menggunakan servo, gripper ini dapat bergerak 180 derajat serta pada pagan penjepitnya dapat membuka dan menutup yang memungkinkan untuk menjepit sebuah benda dengan lebar 3cm. Sedangkan untuk menerima instruksi dari user ditambahkan modul
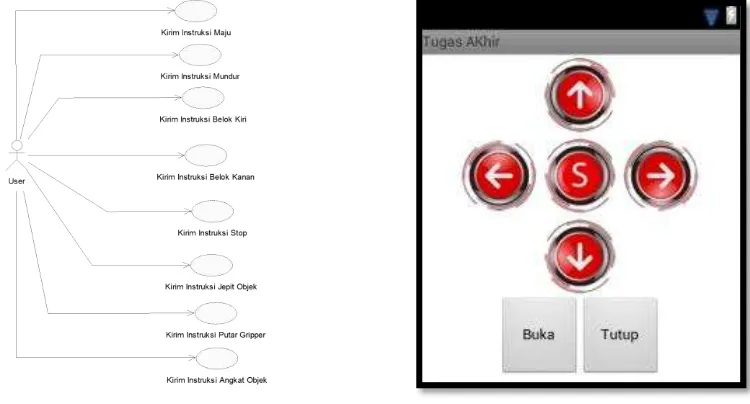
DFRBluetooth v.3. Pada perangkat smartphone sebagai tools yang digunakan oleh user untuk mengirim instruksi pada mobile robot, maka diperlukan perancangan aplikasi mobile bebasis Android untuk mengirimkan instruksi ke mobile robot. Pemodelan pada prototype kedua dapat dilihat pada Gambar 2 Use CaseDiagramPrototype
Kedua (sebelah kiri). Sedangkan untuk prototype antarmuka aplikasi pengendali mobile robot dapat dilihat pada Gambar 3 Prototype Antarmuka Aplikasi Mobile
Gambar 2 Use Case Diagram Prototype Kedua Gambar 3. Prototype Antarmuka Aplikasi Mobile
Pengujian dilakukan setelah prototype kedua selesai dikerjakan. Setelah dilakukan pengujian terhadap
prototype kedua diperoleh hasil bahwa penambahan alat berupa penjepit (gripper) pada mobile robot dapat berfungsi sesuai dengan yang diharapkan. Pengujian Bluetooth sebagai sarana untuk mengirimkan perintah dari
user ke mobile robot berhasil dilakukan. Namun, di sisi lain penggunaan Bluetooth sebagai media pengirim instruksi mengalami kendala. Jarak maksimum yang dapat tercipta dari koneksi Bluetooth adalah 10-12 meter, sementara hasil yang diharapkan setidaknya mencapai jarak lebih dari 15 meter. Penambahan alat gerak berupa
gripper pada bodymobile robot, mengakibatkan bertambahnya beban mobile robot tersebut. Dengan adanya
gripper tersebut konsumsi listrik cenderung lebih boros. Dengan demikian, dari hasil pengujian yang telah dilakukan protoytpe kedua disimpulkan bahwa pada prototype kedua ini hasil akhir belum sesuai dengan yang diharapkan dan perlu dilakukan analisis dan perancangan lebih lanjut.
3.3
Prototype
Ketiga
Prototype ketiga dikembangkan guna memenuhi kekurangan yang terdapat pada pengembangan
sebelumnya belum ada pada mobile robot yang dikembangkan pada prototype sebelumnya. Pada pengujian
prototype kedua diperoleh hasil bahwa jarak tempuh dari koneksi Bluetooth dari user ke mobile robot adalah sekitar 10-12 meter. Sementara tujuan yang diharapkan adalah mobile robot dapat menempuh jarak lebih dari 15 ketika dikendalikan secara nirkabel. Berdasarkan kondisi tersebut pada prototype ketiga dirancang dan dibangun sebuah perangkat pembantu yang berfungsi sebagai router untuk membantu menyambung koneksi dari user ke
mobile robot. Sehingga koneksi yang dibentuk akhirnya terbagi dua kali proses pengiriman data. Pertama, koneksi dari smartphone user ke router dengan menggunakan Bluetooth. Kedua, koneksi dari router ke mobile robot
menggunakan XBee S2. Dengan digunakannya perangkat tambahan berupa router yang terdiri dari XBee S2,
Arduino dan Bluetooth, maka pada gambar di bawah ini merupakan gambaran secara utuh mengenai proyek tugas akhir yang dikembangkan.
Gambar 4 Gambaran Umum Proyek Tugas Akhir
Prototype ketiga ini dilakukan perancangan dan penataan ulang posisi komponen pada mobile robot. Hal ini disebabkan karena semakin banyaknya komponen yang terpasang pada mobile robot. Prototype ketiga dirancang sebuah mekanika tambahan yakni berupa dudukan yang berfungsi untuk menyimpan sebuah perangkat yang berfungsi menyimpan IP Cam, smartphone yang memiliki aplikasi IP Cam atau perangkat sejenisnya agar
user dapat melihat kondisi terdekat dengan robot melalui media tersebut.
Dengan semakin banyaknya komponen yang membutuhkan sumber daya listrik, pada perancangan
prototype ketiga dilakukan perancangan power supply dari baterai sebesar 9,6 V. Pada paragraf sebelumnya disebutkan bahwa pada mobile robot ditambahkan komponen yang berfungsi sebagai IP Cam. Pada perancangan
prototype ketiga digunakan smartphoneSamsung Galaxy Y yang diinstall aplikasi IP Cam, sehingga smartphone
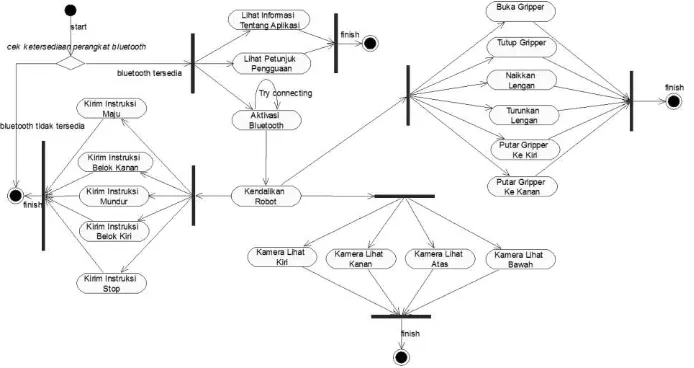
ini difungsikan layaknya IP Cam. Untuk mengakses hasil capture dari perangkat ini dapat diakses melalui wifi tethering. Aplikasi pengendali pada perangkat smartphone dilakukan perancangan ulang. Pada aplikasi ditambahkan fitur yang berfungsi untuk menampilkan hasil capture video dari Mobile robot. Selain itu, pada aplikasi pengendali ini ditambahkan juga fitur untuk menggerakkan dudukan perangkat capture pada mobile robot. Sehingga perangkat capture yang ada pada mobile robot dapat bergerak ke beberapa arah yang memungkinkan user dapat melihat ke wilayah sekitar robot. Pada gambar di bawah ini merupakan activity diagram pada pengembangan prototype ketiga.
Setelah dilakukan perancangan terhadap prototype ketiga, selanjutnya prototype tersebut dilakukan pengujian. Pengujian dilakukan terhadap mobile robot, router dan aplikasi pengendali mobile robot pada perangkat smartphone. Tabel 1 merupakan hasil pengujian aplikasi smartphone pengendali mobile robot
Tabel 1 Hasil Pengujian Aplikasi Pengendali
No Nama Antarmuka Tampilan Antarmuka Proses Pengujian Hasil Yang Diharapkan Status 1 Kendali Arah
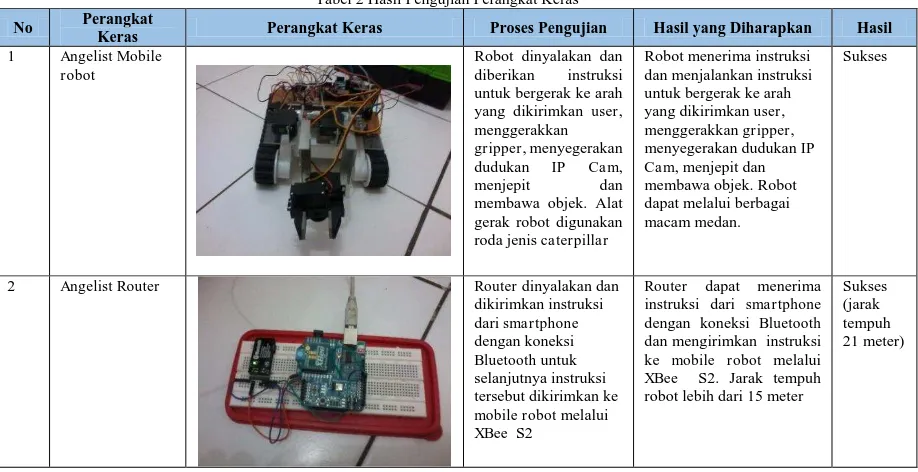
Sedangkan untuk hasil pengujian yang dilakukan terhadap mobile robot dan perangkat router yang terdiri dari Bluetooth dan XBee S2 sebagai penghubung koneksi dari user ke mobile robot dapat dilihat pada tabel 2 di bawah ini.
Tabel 2 Hasil Pengujian Perangkat Keras
No Perangkat
Keras Perangkat Keras Proses Pengujian Hasil yang Diharapkan Hasil 1 Angelist Mobile
2 Angelist Router Router dinyalakan dan dikirimkan instruksi
Berdasarkan aktivitas yang telah dilakukan mulai dari pembangunan prototype pertama sampai dengan
prototype ketiga, tujuan yang hendak dicapai dari pelaksanaan tugas akhir ini dianggap telah terpenuhi. Hal ini didasarkan atas terpenuhinya tujuan-tujuan yang hendak dicapai dari pembangunan mobile robot yang akan dikendalikan dari jarak jauh secara nirkabel, dimana mobile robot memiliki alat gerak yang dapat bergerak dalam berbagai macam medan serta dapat memindahkan objek (benda) serta dapat memberikan gambaran situasi sekitar
5.
PENUTUP
Kesimpulan yang diambil dari hasil pembangunan mobile robot dengan smartphone sebagai sistem pengendali gerak adalah sebagai berikut:
1. Penggunaan roda jenis tank thread atau caterpillar mendukung mobile robot untuk bergerak dalam berbagai macam medan.
2. Mobile robot yang dibangun sudah dilengkapi dengan device berupa smartphone yang telah terinstall
aplikasi IP Camera yang mendukung untuk memberikan suatu informasi berupa gambaran situasi terkini dari sekitar robot yang disajikan secara visual
3. Penggunaan perangkat Bluetooth dan XBee dapat digunakan sebagai media untuk mengirimkan instruksi dari user ke mobile robot sehingga mobile robot dapat dikendalikan dari jarak jauh secara nirkabel.
Adapun di bawah ini adalah saran pengembangan diperlukan agar pengembangan mobile robot pada tahap selanjutnya :
1. Pada pengembangan selanjutnya, diharapkan pada aplikasi pengendali mobile robot terdapat fitur untuk pengaturan kecepatan dari modul roda pada mobile robot. Sehingga mobile robot dapat dikendalikan kecepatannya melalui aplikasi pengendali.
2. Pada mobile robot ditambahkan sensor-sensor lain (seperti suhu, kadar oksigen, dan lain sebagainya) sehingga informasi yang diperoleh dari sekitar robot menjadi lebih bervariasi.
3. Untuk pengembangan selanjutnya aplikasi pengendali mobile robot diharapkan memiliki tombol-tombol yang lebih interaktif seperti penggunaan tombol seperti joypad / joystick game.
REFERENSI
[1] Robot, http://id.wikipedia.org/wiki/Robot, Tanggal akses : Juni 2013.
[2] Siswaja, Hendy Djaja. 2008. “Prinsip Kerja dan Klasifikasi Robot”. Bandung: Media Informatika.
[3] Safaat H, Nazaruddin. 2011. “Android – Pemrograman Aplikasi Mobile Smartphone dan Tablet PC Berbasis
Android”. Bandung: Informatika.
[4] Pressman, Roger S. 2012. “Rekayasa Perangkat Lunak”. Edisi 7 Buku 1. Yogyakarta : Andi.
[5] Microcontroller, http://www.atmel.com/products/microcontrollers/default.aspx, Tanggal akses : Maret 2013
[6] Getting Started with Arduino, http://arduino.cc/en/Guide/HomePage, Tanggal akses : Maret 2013.
[7] DFR Mega, http://www.dfrobot.com/index.php?route=product/product&product_id=501#.UwQWpfl_v3Y,
Tanggal akses : Maret 2013.
[8] DFR Bluetooth v3, http://www.dfrobot.com/index.php?route=product/product&product_id=360#.UwQV- fl_v3Y,
Tanggal akses : Maret 2013.
[9] Point-to-Point XBee Setup, http://xbee.wikispaces.com/Point+to+Point+XBee+Set+up, Tanggal akses :