Abstract— An SVPWM FSTPI has been applied to feed a three phase squirell-cage induction motor (0,5Hp, 220 V, 1430rpm, 50Hz) using sensorless vector control method. The results of simulation, showed the SVPWM FSTPI has a good performance of dynamic cases. Two dynamic conditions have been considered; sudden loss of load and sudden load increase.
Index Terms—SVPWM FSTPI, sensorless vector control, dynamic model, squirell-cage induction motor
Abstrak–-Sebuah model SVPWM FSTPI digunakan untuk mencatu motor induksi tiga fasa rotor sangkar 0,5Hp, 220 V, 1430rpm, 50Hz. Skema pengaturan motor induksi berbasis pada metode sensorless vector control yang dikembangkan secara lebih sederhana. Berdasarkan hasil simulasi dengan perangkat lunak, SVPWM FSTPI mampu bekerja dengan optimal pada kasus dinamis, baik ketika torsi beban mendadak dihilangkan atau mendadak dinaikan ke nilai nominalnya.
Kata Kunci—SVPWM FSTPI, sensorless vector control, model dinamik, motor induksi
I. LATAR BELAKANG
VPWM inverter banyak digunakan sebagai catu daya untuk menggerakkan motor induksi pada aplikasi variable speed drive (VSD). Salah satu topologi inverter ini adalah four switch three phase inverter (FSTPI). Apabila tegangan keluaran FSTPI dibentuk dengan teknik space vector pulse width modulation (SVPWM), maka topologinya dikenal sebagai SVPWM FSTPI [1-4].
SVPWM FSTPI lebih ekonomis ketimbang topologi inverter tiga fasa yang konvensional. Jumlah komponen semikondukstornya lebih sedikit, serta rangkaian drivernya lebih sederhana. Akan tetapi, tegangan output SVPWM FSTPI cenderung tidak seimbang akibat salah satu fasanya diambil dari titik sambung kapasitor dc link, sedangkan dua fasa yang lain dibentuk dengan teknik SVPWM. Teknik SVPWM pada FSTPI dapat menghemat prosesor yang digunakan, cukup dengan mikrokontroler 8-bit [5, 10-14].
SVPWM FSTPI dapat diintegrasikan dengan metode vector control untuk mengatur kecepatan maupun torsi motor induksi untuk kasus-kasus perubahan beban yang terjadi secara tiba-tiba. Salah satu metode vector control yang paling ekonomis adalah sensorless vector control, dimana tidak diperlukan adanya sensor kecepatan, maupun sensor posisi. Akan tetapi, metode ini memerlukan estimator kecepatan putar atau posisi rotornya [2-4,13,17].
Selanjutnya, pada penelitian ini dibuat sebuah model SVPWM FSTPI dengan bantuan perangkat lunak. FSTPI mencatu motor induksi tiga fasa rotor sangkar 0,5Hp, 220 V, 1430rpm, 50Hz. Skema pengaturan motor induksi berbasis pada metode sensorless vector control yang dikembangkan secara lebih sederhana.
II. TEORI DASAR A. SVPWM Inverter
Tegangan keluaran salah satu fasa SVPWM FSTPI diambilkan dari simpul yang terletak di tengah- tengah kapasitor dc-link. Dua fasa yang lain diambilkan dari simpul pada bagian tengah komponen- komponen semikonduktornya. Catu daya dari SVPWM FSTPI berupa tegangan dc, yang besarnya dijaga konstan[3-8].
Gambar 1. Sistem VSD dengan SVPWM FSTPI [9]
Pada Gambar 1 di atas terlihat sebuah rangkaian SVPWM FSTPI yang digunakan sebagai penggerak motor induksi tiga fasa rotor sangkar. Pada sistem VSD,
SVPWM FSTPI sebagai Penggerak Motor
Induksi Tiga Fasa Rotor Sangkar Berbasis
Metode Sensorless Vector Control
Aripriharta1), Rini Nur Hasanah2), Teguh Utomo3)1) Mahasiswa S2-STL Jurusan Teknik Elektro, Fakultas Teknik, Universitas Brawijaya; 2) &3) Dosen Jurusan Teknik Elektro, Fakultas Teknik, Universitas Brawijaya 1)[email protected], 2)[email protected])[email protected]
motor induksi dapat dioperasikan dalam hubungan Y maupun . Konfigurasi hubungan belitan stator motor induksi berpengaruh pada bentuk sektor SVPWM pada FSTPI [1, 7, 9-11].
Gambar 2. Sektor SVPWM inverter tiga fasa konvensional [7]
Gambar 3. Sektor SVPWM pada topologi FSTPI[7]
Tegangan keluaran SVPWM inverter tiga fasa merupakan hasil konversi dari tegangan masukan dc menggunakan teknik SVPWM. SVPWM adalah teknik modulasi vektor ruang yang diterapkan dengan menggunakan sistem koordinat kartesian . Pada teknik SVPWM konvensional, bidang dibagi menjadi enam buah sektor (Gambar 2). Sedangkan pada FSPTI hanya terdapat empat buah sektor seperti dalam Gambar 3.
Tabel 1. Proses switching FSTPI [7]
0 0
1 0
1 1
0 1
Tegangan referensi SVPWM FSTPI (Vref) digambarkan dalam bentuk vektor. Hubungan kesetaraan volt sekon pada setiap sektornya digunakan sebagai acuan dalam memperhitungkan besarnya duty cycle sinyal SVPWM. Kemudian besarnya duty cycle ini digunakan untuk mengitung lamanya waktu on pasangan komponen semikonduktor saat Vref melintasi
sektor-sektor pada bidang . Proses switching inilah yang menghasilkan tegangan keluaran (v) dari SVPWM FSTPI seperti dalam Tabel 1.
Apabila ditinjau bahwa stator motor induksi tiga fasa rotor sangkar dihubung Y, maka tegangan stator fasa ke netral diperoleh berdasarkan persamaan-persamaan berikut ini[1, 10],
(1)
(2)
(3)
dengan
v10, v20,v30 adalah tegangan fasa R, S, dan T ke titik n,
v1, v2,v3 adalah tegangan fasa R, S, dan T ke titik netral
vN0 adalah tegangan titik netral (N) ke titik n, dalam volt
Belitan stator motor induksi tiga fasa rotor sangkar dianggap simetris, maka diperoleh komponen tegangan [1],
(4)
(5)
dengan
adalah komponen v dalam sumbu (real) adalah komponen v dalam sumbu (imajiner) Pada SVPWM harus didefinisikan terlebih dahulu sebuah vektor referensi, misalkan v dalam bidang . Pendekatan yang digunakan oleh vektor referensi v berdasar kepada pemilihan urutan switching q1, q2, q3, dan q4. Berikut ini adalah persamaan v[1];
(6)
dengan
m adalah indeks modulasi
tegangan masukan FSTPI, dalam volt pergeseran sudut v terhadap sumbu
Berdasarkan pers. 6, v berputar pada bidang dengan kecepatan d/dt. Akibat perputaran v, maka terbentuk lintasan bundar yang radiusnya tergantung pada amplitudo v. Berdasarkan [1] diperoleh algorithma pembentukan pulsa SVPWM untuk FSTPI seperti ditunjukkan pada Gambar 4.
B. Sensorless vector control
Perkembangan teknologi elektronika daya dan prosesormikro memberi andil besar dalam pengambangan metode pengaturan kecepatan maupun torsi motor induksi tiga fasa rotor sangkar. Secara fisik, motor ini hanya mendapat eksitasi dari sisi satornya saja. Sedangkan rotornya diinduksi berdasarkan prinsip Lenz-Faraday. Metode vector control bertujuan untuk membuat agar motor induksi dapat diperlakukan sama seperti motor dc penguatan terpisah. Dengan adanya metode vector control, kecepatan dan torsi motor dapat diatur secara terpisah, dengan memisahkan komponen arus statornya maupun rotornya[13].
Salah satu alternatif metode vector control yang lebih ekomonis adalah sensorless vector control. Pada metode ini penggunaan sensor diminimalisir. Sebagai gantinya diperlukan model estimator untuk memperkirakan besarnya parameter yang biasanya diperoleh melalui sensor-sensor tersebut. Sensorless berarti bahwa sistem tersebut tidak menggunakan sensor kecepatan, maupun sensor posisi [8-9,11, 13-14].
Biasanya sistem sensorless ini berbasis pada metode indirect, yakni fluksi rotor tidak disensor secara langsung dengan sensor magnet, misalnya Hall efect, melainkan diperoleh berdasarkan perhitungan dari variabel variabel statornya. Ini sesuai dengan Gambar 4 di bawah ini [8].
Gambar 4. Metode Sensorless Vector Control (diadaptasi dari [8])
C. Model Motor Induksi
Pada kasus vector control, motor induksi tiga fasa rotor sangkar biasanya dimodelkan dengan menggunakan model dinamisnya. Parameter motor induksi seperti induktansinya, dapat berubah-ubah setiap ada perubahan sudut rotornya. Kendala-kendala yang dihadapi dapat diatasi dengan menggunakan model dinamis motor induksi yang dikenal sebagai model space vector.
Model space vector diformulasikan dengan beberapa asumsi, yakni: parameter-parameter pada setiap fasa motor ini dalam kondisi setimbang, celah udara seragam,
rugi-rugi dan saturasi diabaikan. Model space vector ini diformulasikan dengan menggunakan kerangka acuan sembarang. Kerangka acuan ini merupakan sistem koordinat dua dimensi, K yang berputar dengan kecepatan sembarang, ωK.
Bila bidang acuan sembarang berputar dengan kecepatan 0, ωK= 0, maka model motor induksi tiga fasa rotor sangkar akan berorientasi pada statornya. Substitusi ωK= 0 ke dalam persamaan-persamaan acuan sembarangnya menghasilkan model space vector dalam bidang [13-14]. . Model fluksi[17]: (7) (8) (9) (10) Model Arus[17]: (11) (12) (13) (14) Model mekanik[17]: (15) III. METODOLOGI PENELITIAN
Penelitian ini dikembangkan dengan metode desain eksperimental. Tahapan awal merupakan desain atau pengembangan model SVPWM FSTPI dan model sensorless vector control. Pada tahap ini diperlukan data-data sekunder dari datasheet motor induksi tiga fasa.
Kemudian, berdasarkan data-data tersebut dipilih komponen semikonduktor yang diperlukan berserta kapasitansi kapasitor, rating tegangan kapasitor serta tegangan dc masukannya. Setelah menentukan nilai-nilai parameter rangkaian. Selanjutnya dengan menggunakan perangkat lunak, model sistem disimulasikan dan dianalisis.
IV. HASILDAN ANALISIS
Model SVPWM FSTPI dirancang untuk menggerakkan motor induksi tiga fasa rotor sangkar berbasis metdoe vector control. Motor induksi yang digunakan memiliki data teknis sebagai berikut,
Oleh karena tegangan kerja motor induksi yang digunakan adalah 220V, maka tegangan masukan FSTPI dipilih sebesar 200V. maka ditetapkan Kapasitansi kapasitor DC link C1, dan C2 sebesar,
Frekwensi switching dari SVPWM ditetapkan sebesar 10kHz.
Model SVPWM FSTPI yang digunakan dalam simulasi dengan perangkat lunak. Pada proses simulasi ini digunakan model kendali sensorless vector control diperlihatkan pada Gambar 6.
Gambar 6 Model sensorless vector control
Parameter kontroler PI untuk arus Id
Parameter PI untuk arus n
Parameter PI untuk arus Iq
Eksperimen difokuskan pada perilaku dinamis sistem dengan menerapkan perubahan yang mendadak pada torsi beban. Pada ekperimen ini, model SVPWM FSTPI di setting dengan tegangan dc 200V, frekwensi
switching 10 kHz. Motor induksi 3-fasa tipe sangkar 0,5Hp, 1,29Nm, 220V, 50Hz, 1400rpm, hubungan Y.
Dari simulasi dengan rentang waktu 1s diperoleh kurva arus stator perfasanya (isa,isb, isc), torsi elektromagnetik motor induksi (Tem_IM).
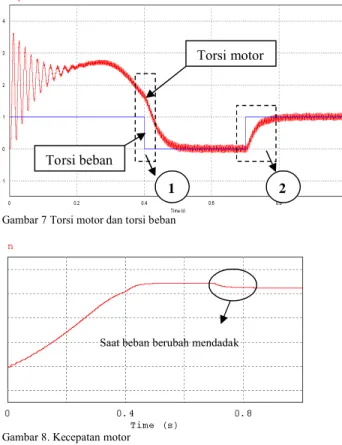
Gambar 7 Torsi motor dan torsi beban
Gambar 8. Kecepatan motor
Selama proses simulasi, rotor di setting agar berputar pada kecepatan 1200rpm, Id,refdisetting pada nilai 1 A. Kemudian sistem disimulasi selama 3s. Hasil simulasi menunjukkan bahwa sistem yang dirancang mampu merespon perubahan torsi beban dengan baik. Ketika torsi beban melonjak dari 0 Nm sampai 1Nm, sistem dapat menjaga rotor berputar dengan kecepatan 1200rpm. Ketika secara mendadak beban dihilangkan, motor berputar lebih cepat dari nilai referensinya selama 3ms, kemudian kembali berputar pada kecepatan 1200rpm.
V. KESIMPULAN
Berdasarkan hasil simulasi dapat disimpulkan bahwa:
Metode sensorless vector control yang digunakan pada aplikasi VSD SVPWM FSTPI mampu bekerja dengan baik pada kasus dinamis, baik ketika torsi beban mendadak dihilangkan atau mendadak dinaikan ke nilai nominalnya.
Ketika torsi beban melonjak dari 0 Nm sampai 1Nm, sistem dapat menjaga rotor berputar dengan kecepatan 1200rpm.
Apabila secara mendadak beban dihilangkan, motor berputar lebih cepat dari nilai referensinya selama
Torsi motor
Torsi beban
1 2
3ms, kemudian kembali berputar pada kecepatan 1200rpm.
UCAPAN TERIMA KASIH
Terima kasih untuk program beasiswa BPPS tahun anggaran 2010-2012 sebagai penyandang dana penelitian ini.
DAFTAR PUSTAKA
[1] Dzung, P. Q., Phuong, L. M.. 2007. “ A Modified Space Vector Pwm Algorithm For Low-Cost Inverter Control.” International Symposium on Electrical & Electronics Engineering, Track 3. [2] Ma, T., T. 2011. New Control Strategies for a Two-Leg
Four-Switch STATCOM. Hongkong: Procedings of the
International Multi Conference of Engineers and Computer Scientist 2011, Vol. II.
[3] Mohanty, n. K., Muthu, R. 2010. Microcontroller Based PWM
Controlled Four Switch Three Phase Inverter Fed Induction Motor Drive. Serbian Journal Of Electrical Engineering Vol. 7,
No. 2, November, pp. 195-204
[4] Mohanty, N.K., Muthu, N. 2011. A Novel Implementation of
Xilinx FPGA Based Four Switch Three Phase IGBT Inverter Fed Induction Motor Drive Using PWM. European Journal of
Scientific Research ISSN 1450-216X Vol.48 No.3 pp.424-433. EuroJournals Publishing, Inc.
[5] Monfared, M., Rastegar, H., Kojabadi, H., M. 2008. Overview of
Modulation Techniques for the Four-Switch Converter Topology.
2nd IEEE International Conference on Power and Energy (PECon 08), December 1-3, 2008, Johor Baharu, Malaysia
[6] Monfared, M., Rastegar, H., Kojabadi, H. M. 2010. A Simple
and Efficient Control Strategy for Four-Switch Three-Phase Power Converters. Advances in Electrical and Computer
Engineering Vol. 10, No. 1.
[7] Muralidhara, B. , Ramachandran, A., Srinivasan, A., Channa Reddy, M. 2010. Space Vector PWM Signal Generation for a
Three Phase Inverter and Hardware Implementation Using μ-Controller. International Journal of Engineering Science and
Technology Vol. 2(10), pp. 5074-5979
[8] Neacsu, O.D. 2006. “Power Switching Converter-Medium &
high Power”. Inggris, London: Taylor & Francis
[9] Niasar, A.H., Vahedi, A., Moghbelli, H. 2009. “Low-cost
sensorless control of four-switch, brushless DC motor drive with direct back-EMF detection”. Journal of Zhejiang
University SCIENCE, Vol. 10, Ed. 2, hal. 201-208.
[10] Corrêa, M. B. R. Jacobina, C., B. Silva, E. R. C., Lima, A. M. N. 2006. A General PWM Strategy for Four-Switch Three-Phase
Inverters. IEEE Transactions On Power Electronics, Vol. 21,
No. 6, November
[11] Quang, N. P., Dittrich, J. A. 2008. Vector Control Of
Three-Phase AC Machines. Springer. Berlin
[12] Badsi, B.E., Guermazi, A., Masmoudi,A. On the comparison
between different space vector PWM strategies implemented in FSTPI-fed induction motor drives. COMPEL: The International Journal for Computation and Mathematics in Electrical and Electronic Engineering Vol. 26 No. 1, hal. 127-147, 2007
[13] Wilamowski, B. M., Irwin, J. D. 2011. Power electronics and
motor drIves, The Industrial Electronics Handbook, 2nd edition. Boca Raton: CRC Press Taylor & Francis Group, LLC
[14] Senturk, O., S., Nielsen, S.M., Teodorescu, R. Helle, L., dan Rodriguez, P. 2009. A Single Leg Switched PWM Method for
Three-phase H-Bridge Voltage Source Converters. Energy
Conversion Congress and Exposition (ECCE)-2008, IEEE, hal. 3137-3142
[15] Bose, B. K. 2006. Power Electronics And Motor Drives:
Advances And Trends. Prentice Hall. New Jersey.
[16] Buso, S., Mattavelli, P. 2006. Digital Control In Power
Electronics. Morgan & Claypool. Nebrasca
[17] Boldea, I., Nasar, S.A. 2010. The Induction Machines Design
Handbook, Second Edition. Taylor And Francis Group, Llc.
London
BIBLIOGRAPHY
Aripriharta mahasiswa S2 Teknik Elektro FT-UB. Sejak
2005-sekarang bergabung sebagai dosen di TE FT-UM. Minat risetnya terfokus pada bidang elektronika daya modern, energy
saving dan smart system.
Rini Nur Hasanah, ST., MSc. PhD. adalah
dosen di Jurusan Teknik Elektro, Fakultas Teknik, Universitas Brawijaya, Malang, Indonesia. Ia mendapat gelar PhD di bidang electromechanics dan MSc dalam bidang energi, dari Institut Teknologi Federal Swiss di Lausanne, Swiss. Kepentingan penelitiannya meliputi cabang-cabang electromechanics energi dan juga. Ia telah menerbitkan artikel dan disajikan dalam beberapa jurnal ilmiah dan seminar.
Teguh Utomo, Ir., MT. dosen Teknik Elektro
FT-UB. Minat riset dibidang energi baru dan terbarukan. Telah banyak berkecimpung dalam berbagi kegiatan workshop, training, penelitian dan pengabdian masyrakat di bidang energi, utama mikrohidro. Ia telah menerbitkan artikel dan disajikan dalam beberapa jurnal ilmiah dan seminar.
![Gambar 1. Sistem VSD dengan SVPWM FSTPI [9]](https://thumb-ap.123doks.com/thumbv2/123dok/4368235.3188951/1.918.488.799.817.1000/gambar-sistem-vsd-dengan-svpwm-fstpi.webp)
![Gambar 3. Sektor SVPWM pada topologi FSTPI[7]](https://thumb-ap.123doks.com/thumbv2/123dok/4368235.3188951/2.918.479.793.676.1041/gambar-sektor-svpwm-pada-topologi-fstpi.webp)
![Gambar 4. Metode Sensorless Vector Control (diadaptasi dari [8])](https://thumb-ap.123doks.com/thumbv2/123dok/4368235.3188951/3.918.486.797.269.729/gambar-metode-sensorless-vector-control-diadaptasi-dari.webp)