7
BAB II
KAJIAN PUSTAKA
2.1 Daya Ledak
2.1.1 Definisi Daya Ledak
Dalam melakukan gerakan-gerakan yang membutuhkan kontraksi otot yang kuat dan cepat seperti melompat (jumping), dan berlari sangat bergantung pada daya ledak otot tungkai. Daya ledak berhubungan erat dengan kekuatan kontraksi otot maksimum dalam suatu durasi waktu yang pendek (Asril,1999). Besarnya otot berkontraksi dan berkembangnya gaya pada seluruh lingkup gerak sendi serta hubungannya dengan kecepatan dan gaya merupakan faktor-faktor yang mempengaruhi daya ledak (Sudaryanto dan Erna, 2009). Dengan demikian, jelas daya ledak merupakan satu komponen kondisi fisik yang dapat menentukan hasil prestasi seseorang dalam ketrampilan gerak. Sedangkan besar kecilnya daya ledak otot tungkai dipengaruhi oleh otot melekat dan membungkus tungkai tersebut. Tungkai adalah bagian bawah tubuh manusia yang berfungsi untuk menggerakkan tubuh, seperti berjalan, berlari, dan melompat. Terjadinya gerakan pada tungkai tersebut disebabkan adanya otot- otot dan tulang, otot sebagai alat gerak aktif dan tulang alat gerak pasif.
2.1.2 Faktor-Faktor Yang Mempengaruhi daya ledak
Menurut Berger (2002), ada dua faktor yang mempengaruhi daya ledak, faktor internal dan faktor eksternal. Faktor internal adalah faktor yang berasal dari dalam tubuh manusia dan cenderung menetap, contohnya: genetik, umur, indeks massa tubuh dan jenis kelamin. Sedangkan faktor eksternalnya meliputi: ketinggian tempat, pelatihan, suhu, dan kelembaban relatif udara. Berikut uraian dari faktor-faktor tersebut di atas.
Faktor internal :
1. Genetik
Genetik merupakan unit yang kecil yang tersusun atas sekuen Deoxyribonucleic Acid (DNA) adalah bahan paling mendasar dalam menentukan hereditas. Keunggulan genetik yang bersifat pembawaan atau genetik tertentu diperlukan untuk berhasil dalam cabang olahraga tertentu. Beberapa komponen dasar seperti proporsi tubuh, karakter, psikologis, otot merah, otot putih, dan suku sering menjadi pertimbangan untuk pemilihan atlet (Widhiyanti, 2013). Tubuh seseorang secara genetik rata-rata tersusun oleh 50% serabut otot tipe lambat dan 50% serabut otot tipe cepat pada otot yang digunakan untuk bergerak (Quinn, 2013). Bagi orang yang memiliki kemampuan daya ledak di atas rata-rata biasanya secara genetis memiliki persentase otot tipe cepat yang lebih tinggi (Shergold, 2013).
2. Usia
Daya ledak otot tungkai apabila tidak sering berlatih, maka pada usia 25 tahun kekuatan dan kecepatan akan mengalami penurunan. Kekuatan statis dan dinamis terlihat meningkat secara bermakna pada usia 19-29 tahun, sisa-sisa peningkatan kekuatan dan kecepatan dilanjutkan hampir konstan sampai pada usia 40-49 tahun, kemudian pada usia 50 tahun, selanjutnya kekuatan dan kecepatan menurun secara bermakna searah bertambahnnya usia (Arsil,1999).
3. Indeks Massa Tubuh
Indeks massa tubuh adalah nilai yang diambil dari perhitungan antara berat badan dan tinggi badan seseorang. Rumus menghitung IMT adalah, IMT = Berat Badan (kg) / [Tinggi Badan (m)]2 (Arga, 2008). Hasil penelitian menunjukkan bahwa derajat kegemukan memiliki pengaruh yang besar terhadap performa empat komponen fitness dan tes-tes kemampuan atletik. Kegemukan tubuh berhubungan dengan keburukan performa atlet pada tes-tes speed (kecepatan), endurance (daya tahan), balance (kesimbangan) agility (kelincahan) serta power (daya ledak) (Arga, 2008).
4. Jenis Kelamin
Kekuatan otot laki-laki sedikit lebih kuat daripada kekuatan otot perempuan pada usia 10-12 tahun. Perbedaan kekuatan yang signifikan terjadi seiring pertambahan umur, di mana kekuatan otot laki-laki jauh lebih kuat daripada wanita
(Bompa, 2005). Pengaruh hormon testosteron memacu pertumbuhan tulang dan otot pada laki-laki, ditambah perbedaan pertumbuhan fisik dan aktivitas fisik wanita yang kurang juga menyebabkan kekuatan otot wanita tidak sebaik laki-laki. Bahkan pada umur 18 tahun ke atas, kekuatan otot bagian atas tubuh pada laki-laki dua kali lipat daripada perempuan, sedangkan kekuatan otot tubuh bagian bawah berbeda 1/3 (Nala, 2011).
Faktor eksternal :
1. Suhu dan Kelembaban
Suhu sangat berpengaruh terhadap performa otot. Suhu yang terlalu panas menyebabkan seseorang akan mengalami dehidrasi saat latihan. Dan suhu yang terlalu dingin menyebabkan seorang atlet susah mempertahankan suhu tubuhnya, bahkan menyebabkan kram otot (Widhiyanti, 2013). Pada umumnya upaya penyesuaian fisiologis atau adaptasi orang Indonesia terhadap suhu tropis sekitar 290 -300C dan kelembaban relatif antara 85%-95%.
2. Ketinggian tempat
Tempat yang percepatan gravitasinya rendah akan lebih mudah mengangkat tubuh karena beratnya berkurang sebanding dengan penurunan percepatan gravitasi. Keuntungan ini dibayar dengan kerugian yang lebih besar yaitu setiap ketinggian 100 meter diatas permukaan laut akan terjadi penurunan tekanan udara sebesar 6-10 mmHg. Penurunan tekanan udara ini akan menurunkan kadar O2 (oksigen), sehingga
bila atlet biasa berlatih di dekat permukaan laut kemudian bertanding di tempat tinggi dengan kadar O2 (oksigen) rendah, maka frekuensi pernafasannya akan lebih tinggi karena konsumsi O2 sama dengan saat berlatih sedangkan banyaknya O2 (oksigen) yang dihirup sekali nafas berkurang (Gabriel, 2001).
3. Pelatihan
Pelatihan merupakan salah satu faktor yang berpengaruh dalam peningkatan daya ledak . Pelatihan dapat diartikan sebagai suatu usaha untuk memperbaiki sistem organ alat-alat tubuh dan fungsinya dengan tujuan untuk mengoptimalkan penampilan atau kinerja atlet. Tujuan latihan fisik meningkatkan fungsi potensial yang dimiliki atlet dan mengembangkan kemampuan biomotoriknya sehingga mencapai standar tertentu (Nala, 2002).
2.1.3 Cara Meningkatkan Daya Ledak
Unsur dasar daya ledak adalah perpaduan antara kekuatan dan kecepatan. Daya ledak otot tungkai dapat ditingkatkan dengan memberikan latihan kekuatan otot tungkai dan kecepatan gerak dari otot tungkai. Menurut Suharno HP (1993) ciri-ciri latihan daya ledak adalah : 1) melawan beban relatif ringan, berat beban sendiri, dapat pula tambahan beban luar yang ringan, 2) gerakan relatif aktif, dinamis, dan cepat, 3) gerakan-gerakan merupakan satu gerak yang singkat, serasi dan utuh, 4) bentuk gerak bisa cyclic atau acyclic, dan 5) intensitas kerja submaksimal atau maksimal. Daya ledak akan dapat dikembangkan dengan suatu dorongan atau tolakan yang kuat dan
singkat sehingga memacu kecepatan rangsang saraf, seperti dalam gerakan melompat, meloncat, melempar, menolak, dan sebagainya.
2.1.4 Sistem Energi Daya Ledak
Daya ledak didapat dari otot yang berkontraksi sehingga menyebabkan suatu gerakan. Otot untuk kontraksi sehingga menimbulkan gerakan-gerakan sebagai aktivitas fisik memerlukan energi (ATP). Menurut Fox dan Bowers (1988) ATP paling banyak ditimbun dalam sel otot dibandingkan dengan jaringan tubuh lainya, akan tetapi ATP yang tertimbun di dalam sel otot jumlahnya sangat terbatas, yaitu sekitar 4 - 6 m M/kg otot. ATP yang tersedia ini hanya cukup untuk aktivitas cepat dan berat selama 3 - 8 detik.
Proses pembentukan ATP dalam otot secara sederhana dapat diperoleh melalui tiga cara, yaitu sebagai berikut:
a. Sistem ATP - PC (Phosphagen System); - ATP ADP + Pi + Energi ATP yang tersedia dapat digunakan untuk aktivitas fisik selama 1-2 detik. - CP + ADP C + ATP. ATP yang terbentuk dapat digunakan untuk aktivitas fisik selama 6-8 detik.
b. Sistem Glikolisis Anaerobik (Lactic Acid System); Glikogen/glukosa + ADP + Pi ATP + Asam laktat ATP terbentuk dapat digunakan untuk aktivitas fisik selama 45 - 120 detik.
c. Sistem Erobic (Aerobic System) dimana sistem ini meliputi oksidasin karbohidrat dan lemak. Glikogen + ADP + Pi + O2 CO2 + H2O + ATP ATP yang terbentuk dapat digunakan untuk aktivitas fisik dalam waktu relatif lama.
Aktivitas olahraga pada umumnya tidak hanya secara murni menggunakan salah satu sistem aerobik atau anaerobik saja. Sebenarnya yang terjadi adalah menggunakan gabungan sistem aerobik dan anaerobik, akan tetapi porsi kedua sistem tersebut berbeda pada setiap cabang olahraga (Fox, 1988). Untuk cabang olahraga yang menuntut aktivitas fisik dengan intensitas tinggi dengan waktu relatif singkat, sistem energi predominannya adalah anaerobik, sedangkan pada cabang olahraga yang menuntut aktivitas fisik dengan intensitas rendah dan berlangsung relatif lama, sistem energi predominannya adalah aerobik. Sebagai gambaran Mc Ardle (1986) bahwa dalam menentukan sistem energi predominan adalah sebagai berikut: a. Sistem ATP, waktu kegiatannya 0 - 4 detik, bentuk kegiatannya berupa kekuatan dan daya ledak. Jenis kegiatan pada cabang olahraganya berupa lompat tinggi, servis tenis, dan sebagainya; b. Sistem ATP-PC, waktu kegiatannya 0-10 detik, bentuk kegiatannya berupa daya ledak . Jenis kegiatan pada cabang olahraganya berupa lari sprint dan sebagainya; c. Sistem ATP-PC dan Asam laktat, waktu kegiatannya 0 - 1,5 menit, bentuk kegiatannya berupa anaerobik power. Jenis kegiatan dalam olahraganya berupa lari cepat, lari 200 meter, dan sebagainya; dan d. Sistem Erobik, waktu kegiatannya lebih dari 8 menit, bentuk kegiatannya berupa aerobik daya tahan. Jenis kegiatan olahraganya berupa lari marathon dan sebagainya.
2.1.5 Pengukuran Daya Ledak
Instrumen/alat ukur yang digunakan untuk mengukur daya ledak otot tungkai dapat menggunakan alat Digital Vertical Jump. Instrument test ini diadaptasi dari buku tes dan pengukuran keolahragaan Nurhasan (dikutip dari Sunandar,2014) yang memiliki nilai validitasnya 0,989 dan reabilitas 0,977. Tujuan dari Digital Vertical Jump ini yaitu untuk mengukur daya ledak tungkai dengan satuan (Cm).
Perlengkapan :
o Alat Digital Vertical Jump
Pelaksanaan :
o sampel berdiri lurus di depan alat digital vertical jump.
o Setelah itu sampel mengambil posisi jongkok sebagai awalan sebelum melakukan lompatan.
o Setelah Terdengar suara aba-aba dari alat digital vertikal jump, sampel melakukan lompatan setinggi-tingginya sampai memunculkan angka pada alat digital vertical jump.
o Angka tersebut menyatakan besarnya daya ledak otot tungkai sampel dalam satuan (cm).
Penilaian :
o Skor terbaik dari dua kali percobaan dicatat sebagai skor dalam satuan cm, dengan tingkat ketelitian 0,5 cm.
Untuk lebih jelas, alat dan skema pelaksanaan Digital Vertical Jump dapat dilihat pada gambar berikut :
Gambar 2.1 Pengukuran daya ledak otot tungkai dengan digital vertical jump test Sumber : (Sunandar,2014)
Tabel 2.1 Normal Loncat Tegak
Hasil Lompatan Nilai
Lebih dari 89 Nilai10
85-88 Nilai 9
76-80 Nilai 7 71-75 Nilai 6 66-70 Nilai 5 60-65 Nilai 4 50-59 Nilai 3 40-49 Nilai 2
Kurang dari 40 Nilai 1
Sumber : Ismaryanti (2008) 2.1.6 Metode Latihan Daya Ledak
Daya ledak ini ada yang membagi sesuai spesifikasinya atas : 1) daya ledak explosive (explosive power), 2) daya ledak cepat (speed power), 3) daya ledak kuat (strength power ), dan 4) daya ledak tahan lama (endurance power) (Nala,2011).
Bila pelatihan ditekankan pada komponen kekuatan, maka menjadi daya ledak kekuatan (strength power), kalau penekan pelatihan pada kecepatanya maka hasilnya berupa daya ledak kecepatan (speed power) (Nala,2011). Dalam kepentingan olahraga, daya ledak yang digunakan daya ledak ekplosif yang terdiri atas dua komponen biomotorik yaitu kekuatan dan kecepatan.
Elemen yang ditingkatkan dalam pelatihan daya ledak adalah intensitas, volume (jumlah repetisi, berat beban/RM, waktu interval isturahat selama 2-3 menit bila beban dibawah 85% dari kemampuan maksimal), frekuensi (sebanyak 3-4 kali
seminggu) (Nala, 2011). Menurut Hare (dikutip dari Nala, 2011) takaran untuk meningkatkan kekuatan otot dalam rangka meningkatkan komponen daya ledak ini dalam pelatihan yaitu
1. Repetisi rendah :
Intensitasnya 85-100% dari kekuatan maksimal dengan 1-5 kali repetisi, kecepatan sedang, 3-5 set bagi pemula atau 5-8 set bagi atlet terlatih, istirahat antar set 2-5 menit dan frekuensinya 3 kali seminggu.
2. Repetisi sedang:
Intensitasnya 70-85% dari kekuatan maksimal dengan 5-10 kali repetisi, kecepatan sedang atau rendah, 3-5 set bagi pemula atau 5-8 set bagi atlet terlatih, istirahat antar set 2-4 menit, dan frekuensi 3 kali seminggu.
Salah satu metode yang digunakan untuk dapat meningkatkan daya ledak yaitu pliometrik. Pelatihan pliometrik ditujukan kepada tiga kelompok otot besar dalam tubuh yakni 1 keompok otot tungkai dan pinggul, 2 kelompok otot bagian tengah tubuh (otot perut dan punggung), dan 3 kelompok otot dada, bahu dan lengan (Nala 2011). Tetapi tekanan pelatihannya terutama ditujukan terhadap kelompok otot tungkai dan pinggul (Radcliffe,1985). Dengan takaran: Intensitas : rendah (setiap dua minggu ditingkatkan intensitasnya), volume : repetisi :6-10 kali (pada intensitas tinggi, repetisi : 10-12 kali), set : 3 kali, istirahat antar set : 2 menit, dan frekuensi : 3-4 kali seminggu.
2.2 Anatomi dan Biomekanik
2.2.1 Anatomi Otot Tungkai
Daerah tungkai memiliki beberapa grup otot besar yang dapat memberikan kontribusi terhadap daya ledak. Beberapa grup otot besar yang terlibat adalah
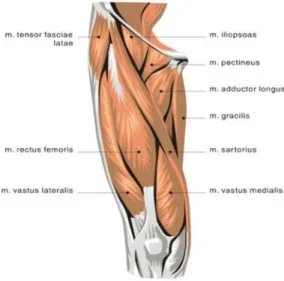
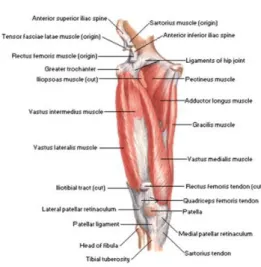
2.2.1.1 Grup Otot ektensor knee dan fleksor hip (m. quadriceps)
Otot quadriceps femoris adalah salah satu otot rangka yang terdapat pada bagian depan paha manusia. Otot ini mempunyai fungsi dominan ekstensi pada knee (Watson, 2002). Otot quadriceps terdiri atas empat otot, yaitu:
a. Otot Rectus Femoris
Tipe otot ini adalah otot tipe 1 yang terletak paling superfisial pada facies ventalis berada diantara otot quadriceps yang lain yaitu otot vastus lateralis dan medialis. Berorigo pada Spina Illiaca Anterior Inferior (caput rectum) dan pada os ilium di cranialis acetabulum (caput obliquum) dan mengadakan insersio pada tuberositas tibia dengan perantaran ligamentum patellae serta diinervasi oleh n. femoralis (L2) (Watson, 2002).
b. Otot Vastus Lateralis
Tipe otot ini adalah otot tipe II yang berada pada sisi lateral yang mengadakan perlekatan pada facies ventro lateral trochanter major dan labium lateral linea aspera femoris, berinsersio di tepi lateral patella dan melewati ligamentum patella sampai ke ankle tuberositas tibia (Watson, 2002).
c. Otot Vastus Medial
Melekat pada labium medial linea aspera (dua pertiga bagian bawah) dan termasuk otot tipe II serta diinervasi oleh n. femoralis (L2-L4) (Watson, 2002).
d. Otot Vastus Intermedius
merupakan otot tipe II serta dinervasi oleh n. femoralis (L2-L4) (Watson, 2002).
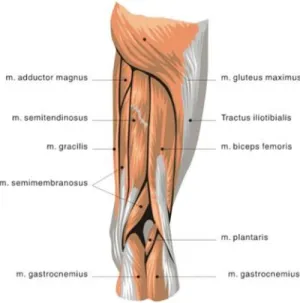
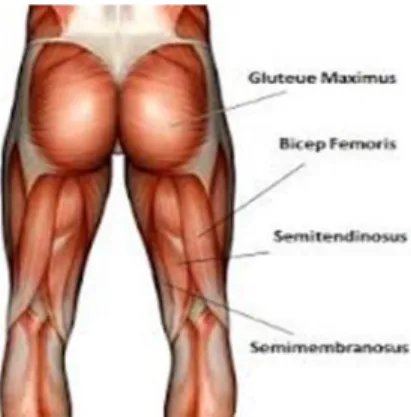
2.2.1.2 Grup Otot Fleksi Knee dan Ektensi Hip (Hamstring)
Hamstring merupakan otot paha yang terletak di posterior, secara umum hamstring bertipe otot serabut otot tipe II (Watson, 2002). Hamstring terbagi atas tiga otot yaitu:
Gambar 2.3 Grup otot hamstring (Watson, 2002)
a. Otot Biceps Femoris
Mempunyai dua buah caput. Caput longum dan breve, caput longum berorigo pada pars medialis tuber Ichiadicum dan M. semitendinosus sedangkan caput breve berorigo pada labium lateral linea aspera femoris,
insersio otot ini pada capitulum fibula serta diinervasi oleh n. ischiadicus (L5,S1,S2) (Watson, 2002).
b. Otot Semitendinosus
Otot ini berorigo pada pars medialis tuber ichiadicum dan berinsersio pada facies medialis ujung proximal tibia serta diinervasi oleh cabang tibialis n. ischiadikus (Watson, 2002).
c. Otot Semimembranosus
Melekat di sebelah pars lateralis tuber ichiadicum turun ke arah sisi medial regio posterior femoris dan berinsersio pada facies posterior condylus medialis tibia serta diinervasi olehcabang tibial n. ischiadikus (L5,S1,S2) (Watson, 2002).
2.2.1.3. Grup Otot Adduksi Hip
Grup otot adduksi hip terletak di bagian medial dari paha yang memiliki fungsi untuk membawa hip joint mendekati bidang tengah tubuh, grup otot adductor terbagi atas empat otot yaitu:
Gambar 2.4 Grup otot adduksi hip (Watson, 2002)
a. Otot Pectineus
Otot ini berorigo di Pecten os pubis dan berjalan sampai melekat pada linea pectenia selain berfungsi sebagai adduksi hip, otot ini juga membantu fleksi dan eksorotasi hip (Watson, 2002).
b. Otot Adductor longus
Otot ini berorigo di Ramus superior dan inferior os pubis dan melekat di 1/3 tengah labium medial linea aspera berfungsi sebagai penggerak adduksi hip, membantu ekstensi dan eksorotasi (Watson, 2002).
c. Otot Adductor Magnus
Otot ini berorigo di ramus ossis ischii dan sisi caudal tuber ischiadicum berjalan sampai melekat di 2/3 bagian proksimal linea aspera,
epicondylus medial femur berfungsi untuk adduksi hip dan membantu endorotasi (Watson, 2002).
d. Otot Gracilis
Otot ini berorigo di ramus inferior os pubis, sepanjang sympisis os pubis sampai melekat di sisi medial tuberositas tibia berfungsi untuk adduksi hip dan membantu fleksi dan endorotasi knee (Watson, 2002).
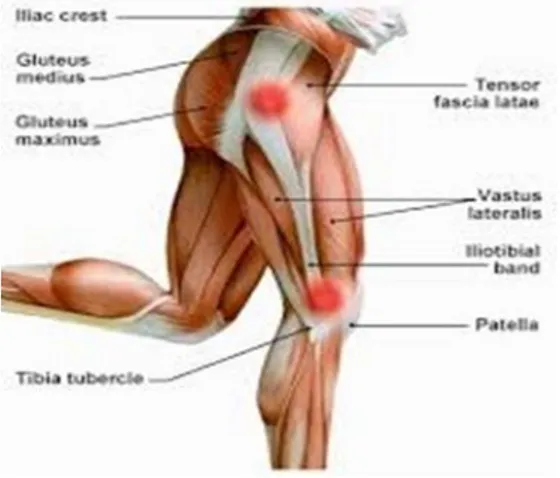
2.2.1.4 Grup Otot Abduksi Hip
Yang termasuk otot abduksi hip yaitu :
a. Otot Gluteus Medius
Otot ini penggerak abduksi hip yang utama berorigo di ala ossis gluteal dan facies gluteal sampai melekat pada trochanter mayor, selain sebagai abductor hip otot ini juga membantu endorotasi dan eksorotasi hip (Watson, 2002).
b. Otot Tensor Fascia Latae
Otot ini berorigo di spina iliaca anterior superior melintang sampai melekat pada tractus iliotibialis, memiliki fungsi sebagai penggerak abduksi hip dan membantu fleksi hip (Watson, 2002).
c. Otot Gluteus Maksimus
Otot ini selain berfungsi sebagai ektensi hip, adduksi, eksorotasi hip juga sebagai membantu abduksi hip. Berorigo dibagian dorsal os sacrum dan facies dorsal os ilium sampai melekat pada tuberositas gluteal serta melekat di tractus iliotibialis (Watson, 2002).
d. Otot Gluteus Minimus
Otot ini berorigo di ala ossis gluteal dan facies gluteal sampai melekat di trochanter mayor, berfungsi sebagai penggerak abduksi hip dan membantu endorotasi serta eksorotasi (Watson, 2002).
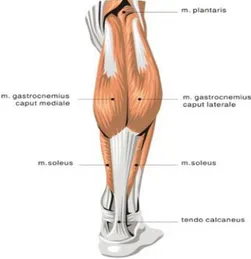
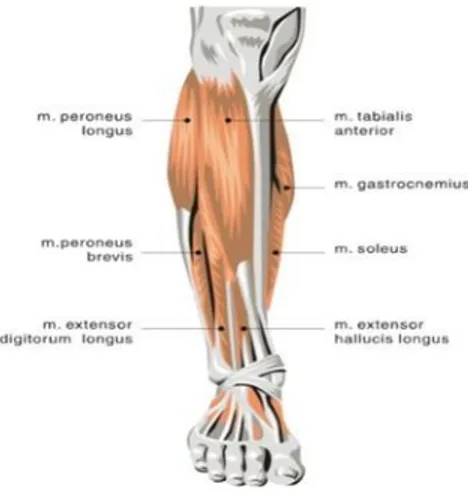
2.2.1.5 Grup Otot Plantar Fleksor Ankle
a. Otot Gastrocnemius
Otot ini merupakan serabut otot fast-twitch yang sangat kuat untuk plantar fleksi kaki pada ankle joint. Otot gastrocnemius merupakan otot yang paling superfisial pada dorsal tungkai dan terdiri dari dua caput pada bagian atas calf. Dua caput tersebut bersamaan dengan soleus membentuk triceps surae. Bagian lateral dan medial otot masih terpisah satu sama lain sejauh memanjang ke bawah pada middle dorsal tungkai. Kemudian menyatu di bawah membentuk tendon yang besar yaitu tendon Achilles (Hamilton, 2012).
b. Otot Soleus
Seperti otot gastrocnemius, otot soleus berfungsi pada gerakan plantar fleksi kaki pada ankle joint. Otot ini terletak di dalam gastrocnemius, kecuali di sepanjang aspek lateral dari ½ bawah calf, di mana bagian lateral soleus terletak pada bagian atas dari tendon calcaneus. Serabut otot soleus masuk ke dalam tendon calcaneal dalam pola bipenniform. Otot ini dominan memiliki serabut slow-twitch (Hamilton, 2012).
2.2.1.6 Grup Dorsofleksi Ankle
Gambar 2.6 Grup otot dorsi fleksor ankle (Watson, 2002)
a. Otot Tibialis Anterior
Otot ini terletak di sepanjang permukaan anterior tibia dari condylus lateral kebawah pada aspek medial regio tarsometatarsal. Sekitar ½ sampai 2/3 ke bawah tungkai otot ini menjadi tendinous. Tendon berjalan di depan malleolus medial sampai pada cuneiform pertama. Otot ini berperan dalam gerakan dorsofleksi ankle dan kaki, serta supinasi (inversi dan adduksi) tarsal joint ketika kaki dorsi fleksi. Dalam penelitian EMG, otot ini ditemukan aktif pada ½ orang yang berdiri bebas dan ketika dalam posisi forward lean (Hamilton, 2012).
b. Otot Extensor Digitorum Longus
Otot ini memanjang pada empat jari-jari kaki. Otot ini juga berperan pada gerakan dorsi fleksi ankle joint dan tarsal joint serta membantu eversi dan abduksi kaki. Otot ini berbentuk penniform, terletak di lateral dari tibialis anterior pada bagian atas tungkai dan lateral dari extensor hallucis longus pada bagian bawahnya. Tepat di depan ankle joint tendon ini membagi empat tendon pada masing-masing jari-jari kaki (Hamilton, 2012).
c. Otot Extensor Hallucis Longus
Otot ini berperan dalam gerakan ekstensi dan hiperekstensi ibu jari kaki. Otot extensor hallucis longus juga berperan pada gerakan dorsofleksi ankle dan tarsal joint. Seperti otot diatas, otot ini juga berbentuk penniform. Pada bagian atas otot ini terletak di dalam tibialis anterior dan extensor digitorum longus, tetapi sekitar ½ bawah tungkai tendon ini menyebar diantara dua otot tersebut di atas sehingga otot ini menjadi superfisial. Setelah mencapai ankle tendonnya ke arah medial melewati permukaan dorsal kaki sampai pada ujung ibu jari kaki (Hamilton, 2012).
2.2.1.7 Grup Otot Gluteus
a. Otot Gluteus maximus
Otot ini merupakan otot yang terbesar yang terdapat di sebelah luar ilium membentuk perineum. Fungsinya, antagonis dari iliopsoas yaitu rotasi fleksi dan endorotasi femur. Fungsi utama dari gluteus maximus adalah untuk menjaga bagian belakang tubuh tetap tegap, atau untuk mendorong kedudukan pinggul ke posisi yang tepat (Watson, 2002).
Gambar 2.7 Otot Gluteus Maximus (Watson, 2002)
b. Otot Gluteus medius dan Minimus
Otot ini terdapat di bagian belakang dari sendi ilium di bawah gluteus maksimus. Fungsinya, abduksi dan endorotasi dari femur dan bagian medius eksorotasi femur (Watson, 2002).
Gambar 2.8 Otot gluteus medius dan minimus (Watson, 2002)
2.2.2 Biomekanik Hip Joint
2.2.2.1 Atrhokinematika Hip Joint
Caput femoris berbentuk konveks seperti bola yang melekat pada collum femoris, dengan arahnya adalah menghadap anterior, medial, dan superior. Sedangkan asetabulum berbentuk konkaf dengan arahnya menghadap anterior, lateral, dan inferior. Pada setiap gerakan hip joint, caput femoris selalu bergerak (slide) berlawanan arah dengan gerakan angular (Anshar dan Sudaryanto, 2011).
Saat gerakan fleksi dan ektensi terjadi gerakan spin pada sendi, abduksi terjadi gerakan roll ke atas dan terjadi slide ke bawah pada sendi, adduksi terjadi roll ke bawah dan slide ke atas pada sendi, internal rotasi/endorotasi terjadi roll ke anterior dan slide ke posterior dan ekternal rotasi/eksorotasi terjadi gerakan roll ke posterior dan slide ke anterior (Anshar dan Sudaryanto, 2011).
Tabel 2.2 Hubungan gerak angular dengan artrhokinematika caput femur
Sumber: (Anshar dan Sudaryanto, 2011)
2.2.2.2 Osteokinematika Hip joint
Hip joint merupakan sendi yang memiliki 3 derajat kebebasan gerak (DKG) yang disebut juga triaxial joint yang terdiri dari fleksi-ekstensi, abduksi-adduksi, dan endorotasi-eksorotasi. Gerakan yang paling luas adalah fleksi hip dan yang paling terbatas adalah ekstensi/hipereskstensi hip (Anshar and Sudaryanto, 2011). Fleksi-ekstensi terjadi pada bidang sagital di sekitar aksis medio-lateral dengan gerak rotasi spin tidak murni. Abduksi-adduksi terjadi dalam bidang frontal di sekitar axis antero-posterior dengan gerak rotasi spin. Endorotasi-eksorotasi terjadi pada bidang transversal di sekitar aksis vertikal dengan gerak rotasi spin pada posisi tungkai
Gerakan angular femur Arthrokinematika caput femur terhadap acetabulum Fleksi Posterior/spin Ektensi Anterior/spin Abduksi Inferior Adduksi Superior Endorotasi Posterior Eksorotasi Anterior
dianggap sebagai permukaan kerucut yang tidak beraturan dan apex-nya terletak pada caput femoris (Anshar dan Sudaryanto, 2011).
Fleksi hip adalah gerakan femur ke depan dalam bidang sagittal dan axis medio-lateral. Jika knee lurus maka luas gerakan fleksi hip dibatasi oleh ketegangan otot hamstring. Gerakan fleksi hip dilakukan dengan knee dalam posisi fleksi dimana pelvic akan backward tilt untuk melengkapi/menyempurnakan gerakan fleksi pada hip joint sehingga luas gerak sendinya lebih besar. ROM fleksi hip dengan posisi ekstensi knee adalah sebesar 00 - 900, sedangkan ROM fleksi hip dengan posisi fleksi knee adalah sebesar 00 – 1200 (gerak aktif) dan 00 – 1400 (gerak pasif). Fleksi hip dihasilkan oleh kontraksi otot iliopsoas yang dibantu oleh otot rectus femoris (Anshar dan Sudaryanto, 2011).
Ekstensi adalah gerakan kembali dari fleksi sedangkan hiperekstensi adalah gerakan femur ke belakang dalam bidang sagital. Faktor penghambat hiperekstensi hip adalah ketegangan ligamen iliofemoral pada bagian depan sendi. ROM ekstensi/hiperekstensi hip adalah 00 – 200 (gerak aktif) dan sebesar 00 – 300 (gerak pasif). Otot yang bekerja pada gerakan ini adalah otot gluteus maximus yang dibantu oleh grup otot hamstring (Anshar dan Sudaryanto, 2011).
Abduksi hip adalah gerakan femur ke samping dalam bidang frontal axis antero posterior sehingga paha bergerak jauh dari midline tubuh. ROM abduksi akan terjadi lebih besar jika femur berotasi keluar. Abduksi dibatasi oleh kerja otot-otot
adductor dan ligamen pubofemoral. ROM abduksi hip sebesar 00 – 450 (gerak pasif) dan 00 – 300 (gerak aktif). Otot yang bekerja pada gerakan abduksi adalah otot gluteus medius et minus dan tensor fascia latae beserta traktus iliotibialis, yang dibantu oleh otot Sartorius (Anshar dan Sudaryanto, 2011).
Adduksi hip adalah gerakan kembali dari abduksi/mendekati dari midline tubuh. Hiperadduksi hanya dapat terjadi jika tungkai sisi kontralateral digerakkan keluar. Pada hiperadduksi yang luas, ligamen capitis (teres) femoris menjadi tegang. ROM adduksi hip sebesar 00 – 300 (gerak pasif) dan sebesar 00 – 200 (gerak aktif). Otot yang bekerja pada gerakan ini adalah grup otot adductor, pectineus, dan gracilis. (Anshar dan Sudaryanto, 2011)
Eksorotasi adalah suatu rotasi femur sekitar aksis longitudinal sehingga knee berputar keluar. Eksorotasi juga merupakan suatu rotasi femur sekitar aksis sagital sehingga knee berputar ke dalam. ROM eksorotasi biasanya lebih besar daripada endorotasi. ROM eksorotasi hip adalah 00 – 400/600, sedangkan otot yang bekerja dalam posisi tungkai lurus adalah enam otot yang pendek yaitu obturator internus externus, gemellus superior dan inferior, quadratus femoris dan piriformis, serta dibantu oleh otot gluteus medius et minimus. Berbeda dengan posisi tungkai fleksi knee dimana otot yang bekerja adalah grup otot adductor, pectineus, gracilis, dan Sartorius (Anshar dan Sudaryanto, 2011).
Endorotasi hip adalah gerak rotasi femur sekitar aksis longitudinal sehingga knee terputar ke dalam. Endorotasi juga merupakan gerak rotasi femur disekitar aksis sagital sehingga knee terputar keluar. ROM endorotasi dan eksorotasi dipengaruhi oleh derajat torsi femoral. ROM endorotasi hip adalah 00 – 300/400, sedangkan otot yang bekerja dalam posisi tungkai lurus adalah grup otot adductor dan pectineus, dan dalam posisi tungkai fleksi knee adalah keenam otot rotator yang pendek yang dibantu oleh tensor fascia latae (Anshar dan Sudaryanto, 2011).
2.2.3 Biomekanik Knee Joint
Knee joint merupakan sendi yang paling besar dan paling kompleks pada tubuh manusia. Knee joint didisain untuk mobilitas dan stabilitas. Secara fungsional, knee dapat memanjangkan dan memendekan lower ektremitas untuk mengangkat dan menurunkan tubuh atau untuk menggerakan kaki dalam space. Knee joint kompleks terdiri dari tibiofemoral joint dan patellofemoral joint (Anshar dan Sudaryanto, 2011).
2.2.3.1 Atrhokinematika Knee
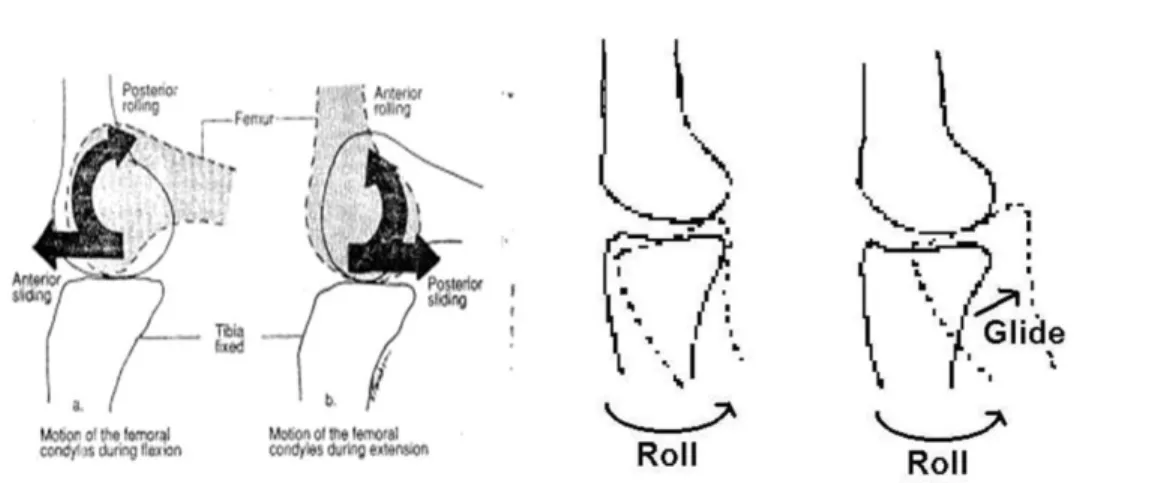
1. Tibiofemoral Joint
Tulang femur berbentuk konveks dengan dua condylus yang tidak simetris pada ujung distal femur, dimana condylus medial lebih panjang daripada lateralis sehingga dapat menghasilkan mekanisme penguncian lutut. Tulang tibia berbentuk konkaf dengan dua dataran tibia pada ujung proximal
tibia beserta meniscus fibrokartilago. Pada open kinematic chain (kinematik terbuka), dataran tibia bergerak dengan slide dalam arah yang sama dengan gerak angularnya. Pada closed kinematic chain (kinematik tertutup), condylus femur bergerak slide dalam arah yang berlawanan dengan gerak angularnya (Anshar dan Sudaryanto, 2011).
Tabel 2.3 Hubungan gerak angular dengan artrhokinematika knee open kinematic chain
Gerakan angular femur Artrhokinematika dataran tibia terhadap condylus femur
Fleksi Posterior
Ekstensi Anterior
Tabel 2.4 Hubungan gerak angular dengan artrhokinematika knee closed kinematic chain
Gerakan angular femur Artrhokinematika condylus femur terhadap dataran tibia
Ektensi Posterior
Sumber: (Anshar and Sudaryanto, 2011)
Gambar 2.9 artrhokinematika condyles femur terhadap dataran tibia (Anshar dan Sudaryanto, 2011).
2. Patellofemoral Joint
Telah dijelaskan sebelumnya bahwa patellofemoral joint hanya menghasilkan gerakan slide saat terjadi fleksi-ektensi knee. Selain itu, dapat dilakukan gerakan slide secara pasif pada patella yaitu medial slide dan lateral slide untuk melihat keutuhan cartilage sendi dan mobilitas patella (Anshar dan Sudaryanto, 2011).
2.2.3.2 Osteokinematika Knee
Tibiofemoral joint termasuk kedalam sendi biaxial bicondyloid dengan sepasang gerakan (2DKG) yaitu fleksi-ektensi dan exorotasi-endorotasi, sedangkan gerakan pasif yang terjadi valgus–varus knee. ROM fleksi knee adalah 00-1200(aktif) dan 00-1400(pasif). Sedangkan ROM extensi/hiperextensi knee adalah 00-50/100. ROM exorotasi knee adalah 00-400, sedangkan ROM endorotasi adalah 00-300. Exorotasi dan endorotasi knee hanya terjadi pada posisi knee fleksi karena pada posisi fleksi knee ligament cruciatum dan collateral menjadi kendur sedangkan pada posisi extensi knee ligament cruciatum dan collateral menjadi tegang dan terjadi penguncian knee (Anshar dan Sudaryanto, 2011).
2. Patellofemoral Joint
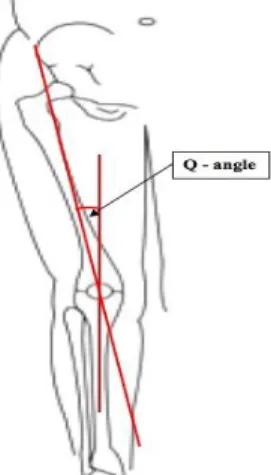
Patellofemoral joint merupakan sendi plane nonaxial yang hanya menghasilkan gerak slide. Patella hanya terjadi slide disepanjang sulcus intercondylaris selama gerakan fleksi-extensi knee. Pada saat fleksi patella akan slide kearah caudal, dan pada saat extensi maka patella akan slide ke cranial atau kembali keposisi awal. Alignment patella memiliki sudut yang dikenal dengan Q angle (sudut Q). Q angle adalah sudut yang dibentuk oleh 2 garis yang saling memotong; garis pertama dari SIAS ke mid-patella, dan garis kedua dari tuberculum tibia ke mid-patella (normalnya 150). Q angle menggambarkan jalur lateral atau efek haluan busur (bowstring) terhadap otot quadriceps dan tendon patellaris (Anshar dan Sudaryanto, 2011).
Gambar 2.10 Q angel (http://www.coreconcepts.com.sg/article/q-angle-and-knee-pain)
2.2.4 Biomekanik Ankle
Region ankle memiliki beberapa sendi dan sangat penting dalam aktivitas berjalan dan berlari.
2.2.4.1 Atrhokinematika Ankle
1. Tibiofibular Joint
Tibiofibular joint hanya menghasilkan gerakan slide saat gerakan plantar fleksi, dorsofleksi, supinasi dan pronasi. Plantar fleksi ankle, malleolus lateral akan berotasi kemedial dan tertarik kearah inferior dan kedua malleolus saling mendekat. Sedangkan pada sendi superior, caput fibula akan slide kearah inferior. Pada saat dorsofleksi ankle, malleolus lateral akan berotasi ke lateral dan tertarik kearah superior serta kedua malleolus
saling membuka, sedangkan pada sendi superior caput fibula slide kearah superior. Pada saat supinasi kaki, caput fibula akan slide ke distal dan posterior (external rotasi). Sedangkan saat pronasi kaki caput fibula akan slide ke proksimal dan anterior (internal rotasi) (Anshar dan Sudaryanto, 2011).
2. Ankle Joint
Permukaan sendi yang konkaf dibentuk oleh ujung distal tibia (malleolus medialis) dan ujung distal fibula (malleolus lateralis), dimana malleolus lateralis sedikit lebih panjang daripada malleolus medialis. Permukaan sendi yang konveks adalah corpus talus yang berbentuk sudut melebar pada sisi anterior dan juga berbentuk konus yang ujungnya menghadap kemedial. Untuk menghasilkan gerakan fisiologis ankle, maka corpus talus akan slide dalam arah yang berlawanan dengan gerakan angularnya (Anshar dan Sudaryanto, 2011).
Tabel 2.5 Hubungan gerak angular dengan artrhokinematika ankle
Gerakan angular Artrhokinematika talus terhadap malleolus
Plantar fleksi Anterior
Sumber: (Anshar and Sudaryanto, 2011)
2.2.4.2 Osteokinematika Ankle
1. Tibiofibular Joint
Tibiofibular joint hanya menghasilkan gerakan slide saat gerakan plantar fleksi, dorsofleksi, supinasi dan pronasi (Anshar dan Sudaryanto, 2011).
2. Ankle Joint
Ankle joint merupakan bentuk sendi hinge uniaxial dengan 1 DKG yaitu plantar fleksi dan dorsofleksi. ROM plantar fleksi adalah 00-500, otot yang bekerja m.gastrocnemius dan soleus yang dibantu oleh otot tibialis posterior, fleksor halucis longus, fleksor digitorum longus, serta otot peroneus
longus dan brevis. ROM dorsofleksi adalah 00-200, otot yang bekerja m.
tibialis anterior, ekstensor halluces longus, ekstensor halluces longus, dan peroneus tertius (Anshar dan Sudaryanto, 2011).
2.2.5 Otot Skeletal
Otot skeletal terdiri dari banyak serabut otot yang berbentuk seperti benang/serabut. Membran yang membungkus serabut otot dinamakan dengan sarkolema. Sarkolema berbentuk seperti neuron yang mengandung potensial
membran. Neuron tersebut akan mengeluarkan impuls yang berjalan ke sarkolema yang mengakibatkan sel otot berkontraksi. Transverse tubulus merupakan lubang yang ada pada sarkolema yang berfungsi menghantarkan impuls dari sarkolema ke dalam sel terutama pada struktur lain di dalam sel yang menyelubungi miofilamen yang disebut sarcoplasmic reticulum. Tranverse tubules mempunyai lubang yang berhubungan dengan retikulum sarkoplasmik dalam menghantarkan impuls serta tempat penyimpanan ion kalsium. Antara retikulum sarkoplasmik dengan sitoplasma sel otot disebut sarkoplasma. Pada sarkoplasma tersebut terjadi pemompaan ion kalsium. Ketika impuls saraf ada pada membran sarcoplasmic reticulum maka terjadi pembukaan membran yang memungkinkan ion kalsium menuju pada sarkoplasma yang akan mempengaruhi miofibril untuk berkontraksi (Fatmawati, 2012).
Sarkoplasma pada setiap serabut otot mengandung sejumlah nukleus dan mitokondria, serta sejumlah benang/serabut miofibril yang berjalan paralel sejajar satu sama lain. Miofibril mengandung 2 tipe filamen protein yang susunannya menghasilkan karakteristik pola striated sehingga dinamakan otot striated atau otot skeletal (Anshar and Sudaryanto, 2011). Miofibril terbuat dari molekul protein yang panjang disebut miofilamen. Miofilamen terdiri dari 2 jenis yaitu thick miofilamen yang berwarna lebih gelap dan thin miofilamen yang berwarna lebih terang. Kedua jenis miofilamen tersebut membentuk sub unit yang saling berhubungan dalam miofibril. Sub unit tersebut dinamakan sebagai sarkomer yang merupakan unit struktural dasar dari serabut otot. Di dalam sarkomer, thick miofilamen berada di
tengah dan diapit oleh thin miofilamen. Jika dilihat dalam mikroskopis daerah tengah sarkomer akan terlihat lebih gelap yang disebut dengan I-band sedangkan daerah pinggir terlihat lebih terang yang disebut dengan A-band. Bagian yang memisahkan antara kedua daerah tersebut adalah Z-line (Sherwood, 2006).
Kepala miosin mempunyai dua tempat tautan yaitu ATP binding site dan aktin binding site. Pergeseran miosin yang terjadi disebabkan karena kepala dari miosin bertemu dengan molekul aktin di dalam miofilamen. Thin miofilamen terdiri dari tiga komponen protein yaitu aktin, troponin dan tropomiosin. Pada otot yang rileks, molekul miosin menempel pada benang molekul tropomiosin, ketika ion kalsium mengisi troponin maka akan mengubah bentuk dan posisi troponin. Perubahan tersebut membuat molekul tropomiosin terdorong dan menjadikan kepala myosin bersentuhan dengan molekul aktin. Persentuhan tersebut membuat kepala miosin bergeser. Pada akhir gerakan ATP masuk dalam crossbridge dan memecah ikatan antara aktin dan miosin. Kepala miosin kembali bergerak ke belakang dan ATP dipecah sebagai ADP + P. Kepala miosin kembali berikatan dengan molekul aktin yang lain. Ikatan ini membuat terjadinya lagi gerakan aktin terdorong oleh kepala miosin (Fatmawati, 2012).
Gambar 2.11 Struktur Otot dan Mekanisme Kontraksi dan Relaksasi Otot (Sumber: Sherwood, 2006)
Seperti gambar diatas, mekanisme terjadinya kontraksi otot dimulai dengan adanya suatu beda potensial pada motor end plate akibat suatu stimulus (neurotransmitter) sehingga tercetusnya suatu potensial aksi pada serabut otot. Menurut Azizah dan Hardjono (2006), ada 2 tipe serabut yang utama yaitu serabut slow-twitch dan serabut fast-twitch. Kedua tipe serabut tersebut terdapat di dalam suatu otot tunggal.
1. Tipe I atau slow twitch (tonik muscle fibers): disebut juga red muscle karena berwarna lebih gelap dari otot yang lainnya. Otot ini memiliki karakteristik tertentu, yaitu menghasilkan kontraksi yang lambat (kecepatan kontraktil yang lambat), banyak mengandung hemoglobin dan mitokondria, kekuatan motor unit
yang rendah, tahan terhadap kelelahan, memiliki kapasitas aerobik yang tinggi dan berfungsi untuk mempertahankan sikap.
2. Tipe II atau fast twitch (phasic muscle fibers): disebut juga white muscle karena berwarna lebih pucat. Otot ini memiliki karakteristik menghasilkan kontraksi yang cepat (kecepatan kontraktil yang cepat), tidak tahan terhadap kelelahan (cepat lelah), memiliki kapasitas aerobik yang rendah, banyak mengandung miofibril, durasi kontraksi lebih pendek dan berfungsi untuk melakukan gerakan yang cepat dan kuat.
Kontraksi otot skeletal ada dua yaitu kontraksi isotonik dan isometrik. Kontraksi otot isotonik dibagi menjadi konsentrik dan eksentrik. Kontraksi konsentrik merupakan kontraksi otot yang membuat otot memendek dan terjadi gerakan pada sendi sedangkan kontraksi eksentrik merupakan kontraksi otot pada saat memanjang untuk menahan beban. Kontraksi isometrik merupakan kontraksi otot yang tidak disertai dengan perubahan panjang otot (Lippert, 2011).
2.2.6 Anatomi Saraf
2.2.6.1 Definisi Saraf
Sistem saraf adalah serangkaian organ yang kompleks dan berkesinambungan yang terdiri dari jaringan saraf. Dalam mekanisme sistem saraf, lingkungan internal dan stimulus eksternal dipantau dan diatur. Jaringan saraf memiliki kemampuan khusus seperti iritabilitas atau sensitivitas terhadap stimulus dan konduktivitas atau
kemampuan untuk menghantarkan suatu respons dari stimulus yang diterima, diatur oleh sistem saraf dalam tiga cara utama yaitu : input sensorik merupakan sistem saraf yang menerima stimulus melalui reseptor yang terletak di tubuh baik eksternal (reseptor somatic) maupun internal (reseptor visceral). Aktivitas integrative merupakan aktivitas reseptor didalam mengubah stimulus menjadi sistem listrik yang menjalar di sepanjang saraf sampai ke otak dan medulla spinalis yang kemudian akan diinterpretasi dan integrasi sehingga respon terhadap informasi bisa terjadi. Output motoric merupakan respon yang sesuai dari otot dan kelenjar tubuh (efektor) hasil dari input dari otak dan medulla spinalis. Menurut Tjaliek (1991): hal yang terpenting didalam hubungan antara otot dan saraf adalah reseptor, pusat, dan efektor. Telaksananya kegiatan motorik pada manusia karena adanya sistem otot yang melekat pada tulang dan saraf-saraf yang menginervasi.
2.2.6.2 Struktur Saraf
Sistem saraf tersusun atas miliaran sel yang sangat khusus yang disebut sel saraf (neuron). neuron merupakan unit anatomis dan fungsionalis dari sistem saraf tersusun atas badan sel, dendrit, dan akson (neurit). Badan sel merupakan bagian sel saraf yang mengandung nukleus (inti sel) dan tersusun pula sitoplasma yang bergranuler dengan warna kelabu. Di dalamnya juga terdapat membran sel, nukleolus (anak inti sel), dan retikulum endoplasma. Retikulum endoplasma tersebut memiliki struktur berkelompok yang disebut badan Nissl. Pada badan sel terdapat bagian yang berupa serabut dengan penjuluran pendek. Bagian ini disebut dendrit. Dendrit
memiliki struktur yang bercabang-cabang (seperti pohon) dengan berbagai bentuk dan ukuran. Fungsi dendrit adalah menerima impuls (rangsang) yang datang dari reseptor. Kemudian impuls tersebut dibawa menuju ke badan sel saraf. Selain itu, pada badan sel juga terdapat penjuluran panjang dan kebanyakan tidak bercabang. Namanya adalah akson atau neurit. Akson berperan dalam menghantarkan impuls dari badan sel menuju efektor, seperti otot dan kelenjar. Walaupun diameter akson hanya beberapa mikrometer, namun panjangnya bisa mencapai 1 hingga 2 meter. Di dalam neurit terdapat benang-benang halus yang disebut neurofibril. Neurofibril dibungkus oleh beberapa lapis selaput mielin yang banyak mengandung zat lemak dan berfungsi untuk mempercepat jalannya rangsangan. Selaput mielin tersebut dibungkus oleh sel-sel sachwann yang akan membentuk suatu jaringan yang dapat menyediakan makanan untuk neurit dan membantu pembentukan neurit. Lapisan mielin sebelah luar disebut neurilemma yang melindungi akson dari kerusakan. Bagian neurit ada yang tidak dibungkus oleh lapisan mielin. Bagian ini disebut dengan nodus ranvier dan berfungsi mempercepat jalannya rangsangan. Kemampuan untuk menerima, menyampaikan dan meneruskan pesan-pesan neural disebabkan oleh karena sifat khusus membrane sel neuron yang mudah dirangsang dan dapat menghantarkan pesan elektrokimia (Price dkk 1995).
Gambar 2.12 sel saraf (Campbell and Reece, 2002)
Berdasarkan struktur dan fungsinya, neuron dikelompokkan dalam empat bagian, yaitu neuron sensorik, neuron motorik, asosiasi dan adjustor (Sloane, 1994)
1. Saraf sensorik, berfungsi menghantar impuls (pesan) dari reseptor ke sistem saraf pusat, yaitu otak (ensefalon) dan sumsum belakang (medulla spinalis). Ujung akson dari saraf sensorik berhubungan dengan saraf asosiasi/penghubung (intermediet).
2. Saraf motorik, mengirim impuls dari sistem saraf pusat ke otot atau kelenjar yang hasilnya berupa tanggapan tubuh terhadap rangsangan. Badan sel saraf motorik berada pada sistem saraf pusat. Dendritnya sangat pendek berhubungan dengan akson saraf asosiasi, sedangkan aksonnya dapat sangat panjang terdapat di sistem saraf pusat dan berfungsi menghubungkan sel saraf motorik dengan sel saraf sensorik atau berhubungan dengan sel saraf lainnya yang ada di dalam sistem saraf pusat. Kelompok-kelompok serabut saraf, akson dan dendrit bergabung dalam satu
selubung dan membentuk urat saraf. Sedangkan badan sel saraf, berkumpul membentuk ganglion atau simpul saraf.
3. Saraf asosiasi (penghubung), terdapat pada sistem saraf pusat yang berfungsi menghubungkan sel saraf motorik dengan sel saraf sensorik atau berhunungan dengan sel saraf lainnya yang ada di dalam sistem saraf pusat. Sel saraf asosiasi menerima impuls dari reseptor sensorik atau sel saraf asosiasi lainnya.
4. Saraf adjustor, berfungsi sebagai penghubung saraf sensorik dan motorik di sumsum tulang belakang dan otak.
5. Sinapsis merupakan hubungan penyampaian impuls dari satu neuron ke neuron yang lain. Peristiwa ini terjadi dari ujung percabangan akson dengan ujung dendrit neuron yang lain. Celah antara satu neuron dengan neuron yang lain disebut dengan celah sinapsis. Loncatan-loncatan listrik yang bermuatan ion terjadi di dalam celah sinapsis, baik ion positif dan ion negatif. Pergantian antara impuls yang satu dengan yang lain juga terjadi di dalam celah sinapsis ini, sehingga diperlukan enzim kolinetarase untuk menetralkan asetilkolin pembawa impuls yang ada. Penyampaian impuls dengan bantuan zat kimia berupa asetilkolin yang berperan sebagai pengirim (transmitter) terdapat dalam celah sinapsis juga.
2.2.6.3 Jenis Saraf
Bagian-bagian sistem saraf dapat dikelompokkan berdasarkan struktur atau fungsinya.
Pembagian sistem saraf secara anatomis atau secara struktural adalah sebagai berikut
a. Sistem saraf pusat
Sistem saraf pusat terdiri atas otak yang berfungsi menerima pesan dan mengirim pesan dan medulla spinalis yang berfungsi membawa pesan dari otak ke saraf tubuh dan mengirim pesan dari saraf tubuh ke otak. Saraf pusat terdiri dari : 1.otak(encephalon) : a.prosencephalon; -telencephalon (hemispherium cerebri, telencephalon medium /telencephalon impar), -diencephalon (thalamus/thalamus
dorsalis, metathalamus /corpora geniculate, hypothalamus, Subthalamus,
epithalamus), b.mesencephalon; tectum mesenchepali, tegmentum mesenchepali, -pedunculus cerebri (crus cerebri), c.rhombenchepalon, -metenchepalon terdiri atas pons dan cerebellum, -myelencephalon juga disebut medulla oblongata. 2.medulla spinalis: pars cervicalis (segmen C1-C8), pars thoracalis(segmen Th1-Th12), pars lumbalis (segmen L1-L5), pars sacralis (segmen S1-S5), dan pars coccygeus (segmen Co1). (Sukardi,2013)
b. Sistem saraf tepi
Berdasarkan lokasi saraf, sistem saraf perifer terdiri dari saraf berikut:
31 pasang saraf spinal yang menghubungkan sumsum tulang belakang dengan seluruh tubuh. 12 pasang saraf kranial yang menghubungkan otak dengan organ-organ vital tubuh.
Atas dasar fungsi saraf, sistem saraf perifer terdiri dari saraf berikut:
Saraf Somatik yang membawa informasi sensori dari kulit dan otot, dan perintah motorik ke otot rangka. Saraf otonom yang membawa sinyal antara SSP dan otot-otot halus, kelenjar, otot jantung dan organ internal. (Sukardi,2013)
2.2.6.4 Mekanisme Penghantaran Impuls
Komponen listrik dari transmisi saraf menangani transmisi impuls dari sepanjang neuron. Permeabilitas sel neuron terhadap ion kalium dan natrium bervariasi dan dipengaruhi oleh perubahan kimia serta listrik dalam neuron tersebut ( terutama nurotransmiter dan stimulus organ reseptor). Dalam keadaan istirahat, permeabilitas membrane sel menciptakan kadar kalium intrasel yang tinggi dan kadar natrium intra sel yang rendah, bahkan kadar natrium ektrasel tinggi. Impuls listrik timbul oleh pemisahan muata akibat perbedaan kadar muatan ion intrasel dan ekstrasel yang dibatasi membrane sel (Guyton,Arthur C, 1987). Skema sistematis perjalanan impuls saraf, keadaan listrik pada membran istirahat (polarized). Ektrasel lebih bnyak natrium, sebaliknya intrasel lebih banyak ion kalium. Membrane dalam keadaan relative impermeable terhadap kedua ion.
a. Depolarisasi
Potensial membrane istirahat berubah dengan adanya stimulus. Ion natrium masuk ke intrasel dengan cepat. Pembentukan potensial aksi pada tempat perangsangan. Jika
stimulus cukup kuat, potensial aksi akan dialirkan secara cepat ke sepanjang membrane sel.(Guyton, Arthur C, 1987)
b. Repolarisasi
Potensial istirahat kembali terjadi. Ion kalium keluar dari intrasel dan permeabilitas berubah kembali. Terjadi pemulihan keadaan negative didalam sel dan positif diluar sel. Potensial aksi yang terjadi atau impuls pada saat terjadi depolarisasi dialirkan ke ujung saraf dan mencapai ujung akson (akson terminal). Saat potensial aksi mencapai akson terminal dikeluarkan neurotransmitter, yang melintasi sinaps dan dapat saja merangsang saraf berikutnya (Marieb, 1998). Timbunya kontraksi pada otot rangka mulai dari potensial aksi dalam serabut-serabut otot. Potensial aksi ini menimbulkan arus listrik yang menyebar ke dalam serabut, dimana menyebabkan terlepasnya ion-ion kalsium dari reticulum sarkoplasma. Selanjutnya ion-ion-ion-ion kalsium menyebabkan munculnya peristiwa-peristiwa kimia proses kontraksi (Guyton, Arthur C, 1987)
2.3 Latihan Knee Tuck Jump
2.3.1 Definisi Latihan Knee Tuck Jump
Knee tuck jump merupakan salah satu latihan pliometrik dalam pelaksanaanya memiliki aturan sendiri, menurut J. C Radcliffe dan R.C Farentinos (2002) knee tuck jump adalah latihan yang dilakukan pada permukaan yang rata dan bergegas seperti rumput, matras, atau keset. Latihan ini dilakukan dalam suatu lompatan eskplosif yang cepat. Knee tuck jump merupakan latihan gerakan meloncat dan mendarat dengan mengeper. Latihan knee tuck jump akan berpengaruh terhadap otot gluteus, gastrocnemius, quadrisep, hamstring, dan hip flexors serta tungkai (Radcliffe dan Farentinos, 2002) dan merupakan bentuk latihan untuk meningkatkan daya ledak, karena latihan ini akan membentuk kemampuan unsur kekuatan dan unsur kecepatan otot yang menjadi dasar terbentuknya kekuatan otot.
2.5.2 Mekanisme Latihan Knee Tuck Jump dapat Mempengaruhi Daya Ledak Otot Tungkai
Menurut Radcliffe dan Farentinos (1985) ada dua jenis reseptor yang berfungsi pada reflek regang sebagai dasar kontraksi otot, yaitu muscle spindle dan organ tendon golgi. Gerakan pliometrik diyakini berdasarkan pada kontraksi reflek dari serat otot yang diakibatkan dari beban yang cepat dan juga penguluran pada serat otot yang sama. Reseptor utama yang bertangung jawab, untuk mendeteksi pemanjangan serat otot secara cepat adalah muscle spindle, yang mampu merespon
baik tingkat perubahan maupun besarnya dalam panjang serat otot. Sedang organ tendon golgi, terletak pada tendon-tendon dan merespon tekanan yang berlebihan sebagai akibat dari kontraksi dan atau penguluran otot yang sangat kuat. Kedua reseptor ini berfungsi secara refleks, dari kedua jenis reseptor otot tersebut muscle spindle mungkin lebih penting pada pliometrik (Radcliffe dan Farentinos, 1985).
Muscle spindle mampu mengemisikan dua jenis respon statis dan dinamis (Radcliffe dan Farentinos, 1985). Suatu respon “statis” dapat terjadi ketika serat intrafusal meregang secara perlahan, disebabkan dari peregangan secara perlahan pada serat otot rangka atau mungkin dari stimulasi langsung intrafusal oleh sistem gamma-afferent. Dalam respon “dinamis” dari muscle spindle, reseptor primer diaktifkan oleh perubahan secara cepat dalam panjang serat intrafusal yang terlilit disekitar muscle spindle tersebut. Ketika hal ini terjadi, reseptor primer mengirimkan banyak impuls pada syaraf tulang belakang. Variabel penting dalam respon yang dinamis tampaknya adalah kecepatan terjadinya peregangan otot. Respon dinamis dari muscle spindle ini menjadi elemen fungsional penting dari gerakan pliometrik.
Fungsi utama muscle spindle yaitu untuk mendapatkan apa yang disebut reflek meregang atau refleks myotatic yang dipertimbangkan dalam proses neuromuscular yang melambangkan dasar gerak pliometrik. Ketika serat otot secara cepat dibebani dengan kekuatan dari luar, maka menyebabkan peregangan secara tiba-tiba, pemanjangan serat terdeteksi oleh muscle spindle, yang mendatangkan respon dinamis ini. Suatu ledakan impuls yang besar dikirim ke saraf tulang belakang
melalui saraf afferent bersinapsis langsung dengan saraf motorik alpha, mengirimkan kembali secara kuat impuls menuju serat otot rangka dan menyebabkan otot ini berkontraksi, sehingga menguasai kekuatan eksternal. Latihan pliometrik memerlukan suatu pemberian beban yang cepat (fase eccentric atau yielding) pada otot. Latihan pliometrik memerlukan fase dimana sekelompok otot atau lainya dipertahankan dalam posisi isometrik sebelum fase eksplosif (concentric atau penguasaan). Resistensi refleks secara instan ini mencoba untuk mencegah tungkai bergerak cepat dari asumsi posisi isometrik yang merupakan akibat dari refleks peregangan dinamik atau refleks beban. Latihan pliometrik bekerja dalam konteks mekanisme saraf yang rumit dan kompleks. Kiranya, sebagai akibat dari latihan pliometrik perubahan terjadi pada tingkat otot dan saraf yang memfasilitasi dan meningkatkan performa atau penampilan yang lebih cepat dan gerakan keterampilan (skill) yang sangat kuat (Radcliffe dan Farentinos, 1985).
Terlibat pula pengendalian kontraksi otot yaitu organ tendon golgi. Mechanoreceptor ini terletak pada tendon itu sendiri dan distimulasi oleh kekuatan yang dapat meregangkan yang dihasilkan oleh kontraksi serat otot yang melekat pada tendon tersebut merespon secara maksimal dengan tiba-tiba meningkatkan tekanan dan mentransmisikan suatu tingkat impuls yang lebih rendah dan terus-menerus ketika tekanan tersebut menurun (Radcliffe dan Farentinos, 1985).
Reflek tendon golgi terjadi ketika tekanan otot meningkat; signal mentrasmisikan pada syaraf tulang belakang yang menyebabkan suatu respon
inhibitory (feed back negatif) pada otot yang berkontraksi, sehingga menjegah sejumlah besar tekanan yang berkembang dalam otot tersebut. Organ tendon golgi dianggap sebagai alat pelindung, yang mencegah penyobekan otot dan atau tendon dalam kondisi ekstrim, tapi dapat pula bekerja bersama-sama dengan refleks muscle spindle dalam mencapai pengendalian keseluruhan atas kontraksi otot dan gerakan tubuh (Radcliffe dan Farentinos, 1985).
Elemen kontraktil yang merupakan serat otot. Bagian tertentu otot merupakan non kontraktil: ujung lapisan serat otot tempat melekatnya dengan tendon, membran silang serat otot dan tendon bersama dengan bagian otot non kontraktil membentuk apa yang dikenal sebagai serangkaian komponen elastis. Bukti terakhir dalam (Radcliffe dan Farentinos, 1985) menganjurkan bahwa perlengkapan serat otot dapat menyumbangkan serangkaian komponen elastik. Peregangan serangkaian komponen elastik ini selama kontraksi otot menghasilkan suatu energi potensial elastis yang serupa dengan pegas yang dibebani. Ketika energi ini dilepaskan, ini menambah tingkat energi tertentu pada kontraksi yang dihasilkan oleh serat otot.
2.3.2 Teknik Aplikasi Latihan Knee Tuck Jump
Petunjuk latihan daya ledak otot tungkai menggunakan Knee Tuck Jump adalah sebagai berikut : (Radcliffe dan Farentinos, 1985)
Ambil sikap berdiri tegak lurus. Tempatkan kedua telapak tangan di depan dada dan menghadap ke bawah.
2) Pelaksanaan
Pelaksanaan latihan knee tuck jump dimulai dengan posisi Quarter-Squad, kemudian loncat ke atas dengan cepat dan berulang-ulang, usahakan lutut mengenai telapak tangan.
Gambar 2.14 Latihan Knee Tuck Jump (Furqon,2002)
2.3.3 Takaran Latihan Knee Tuck Jump
Pelatihan sebaiknya dilakukan 3 kali seminggu dan diselingi dengan satu hari istirahat untuk memberikan kesempatan kepada otot untuk berkembang dan beradaptasi pada hari istirahat tersebut (Harsono, 2000). Pelatihan paling sedikit 3 kali perminggu, hal ini disebabkan karena ketahanan seseorang akan menurun dan harus sudah berlatih lagi (fox, 1992). Penelitian dilaksanakan selama 4 minggu dengan frekuensi 3 kali seminggu (Parthayasa, 2012). Gerakan ini dilakukan dengan 2-5 set dengan repetisi 10-25 kali dan waktu istirahat setiap set 1-2 menit.
2.3.4 Kelemahan latihan knee tuck jump
Latihan knee tuck jump dilakukan dalam suatu lompatan eskplosif yang cepat. Knee tuck jump merupakan latihan gerakan meloncat dan mendarat dengan mengeper. Dilihat dari gerakannya (biomekanika) latihan knee tuck jump menekankan pada loncatan yang maksimal, sedangkan kecepatan pelaksanaan merupakan faktor kedua, dan jarak horizontal tidak diperhatikan pada saat meloncat (Agung,2013). Sehingga dalam mendapatkan daya ledak ekplosif harus menggunakan intensitas tinggi untuk dapat memperoleh komponen kekuatan dan kecepatan secara bersamaan. Akan tetapi hal tersebut akan mempengaruhi kerja otot yang berlebihan dan kontraksi eksentrik dapat memicu terjadinya DOMS (delayed onset muscle syndrome). DOMS dapat dikaitkan dengan adanya stimulasi nyeri yang disebabkan dengan adanya
pembentukan asam laktat, kekakuan otot, kerusakan jaringan ikat, kerusakan otot, peradangan, dll. Gejala yang bisa muncul dalam 24 – 42 jam setelah latihan dan bisa menghilang setelah 5 –7 hari (Cheung, dkk.2003).
2.4 Contract Relax Stretching
2.4.1 Definisi Contract Relax Stretching
Contract relax Stretching adalah salah satu teknik peregangan yang digunakan untuk menggambarkan suatu manuver terapeutik yang bertujuan untuk memanjangkan struktur jaringan lunak yang memendek secara patologis maupun non patologis sehingga dapat meningkatkan Lingkup Gerak Sendi (LGS). Contract relax
stretching merupakan kombinasi dari tipe stretching isotonik dengan stretching pasif. Dikatakan demikian karena teknik contract relax stretching yang dilakukan memberikan kontraksi isometrik pada otot yang memendek dan kemudian dilanjutkan dengan rileksasi dan stretching pasif pada otot tersebut. Contract relax stretching ini memberikan efek pada pemanjangan struktur jaringan lunak (soft tissue) seperti otot, fasia tendon dan ligament yang memendek secara patalogis sehingga dapat meningkatkan lingkup gerak sendi, mengurangi spasme dan pemendekan otot (Wismanto, 2011). Dalam meningkatkan panjang otot berbanding lurus dengan peningkatan fleksibilitas serta peningkatan ROM sendi yang digerakkan otot tersebut.
2.4.2 Mekanisme Contract Relax Stretching terhadap Daya Ledak
Respon mekanik otot terhadap peregangan bergantung pada myofibril dan sarkomer otot. Ketika otot secara pasif diregang, maka pemanjangan awal terjadi pada rangkaian komponen elastis (sarkomer) dan tension meningkat secara drastis. Kemudian, ketika gaya regangan dilepaskan maka setiap sarkomer akan kembali ke posisi resting length. Kecenderungan otot untuk kembali ke posisi resting length setelah peregangan disebut dengan elastisitas. Respon neurofisiologi otot terhadap peregangan bergantung pada struktur muscle spindle dan golgi tendon organ. Ketika otot diregang dengan sangat cepat, maka serabut afferent primer merangsang α (alpha) motorneuron pada medulla spinalis dan memfasilitasi kontraksi serabut ekstrafusal yaitu meningkatkan ketegangan (tension) pada otot. Hal ini dinamakan dengan monosynaptik stretch reflex, suatu ledakan impuls yang besar dikirim ke
syaraf tulang belakang melalui syaraf afferent bersinapsis langsung dengan syaraf motorik alpha, mengirimkan kembali secara kuat impuls menuju serat otot rangka dan menyebabkan otot ini berkontraksi, sehingga menguasai kekuatan eksterna. Tetapi jika peregangan dilakukan secara lambat pada otot, maka golgi tendon organ terstimulasi dan menginhibisi ketegangan pada otot sehinggga memberikan pemanjangan pada komponen elastik otot yang paralel (Wismanto, 2011). Reflek tendon golgi dapat pula bekerja bersama-sama dengan refleks muscle spindle dalam mencapai pengendalian keseluruhan atas kontraksi otot dan gerakan tubuh. Ketika otot di stretch secara aktif dengan perlahan dan lembut, maka golgi tendon akan terstimulasi optimal, sehingga penguluran akan terjadi pada serabut otot serta fascia dimana jumlah sarkomer bertambah dan fascia terulur. Dengan serangkaian komponen elastik ini otot menghasilkan suatu energi potensial elastis yang serupa dengan pegas yang dibebani. Ketika energi ini dilepaskan, ini menambah tingkat energi tertentu pada kontraksi yang dihasilkan oleh serat otot. Salah satu alasan untuk mempertahankan suatu penguluran dalam jangka waktu yang lama adalah pada saat otot dipertahankan pada posisi terulur maka spindel otot akan terbiasa dengan panjang otot yang baru. Secara bertahap reseptor stretch akan terlatih untuk memberikan panjang yang lebih besar lagi terhadap otot. Alasan yang mendasari stretch refleks mempunyai dua komponen adalah karena terdapat dua serabut otot intrafusal yaitu serabut rantai nuklear (nuclear chain fibers) yang bertanggung jawab untuk komponen statis dan serabut tas nuklear (nuclear bag fibers) yang bertanggung jawab untuk komponen dinamis. Serabut rantai nuklear (nuclear chain fibers)
panjang dan tipis dan segera memanjang pada saat diulur. Pada saat serabut ini diulur saraf stretch refleks akan meningkatkan tingkat sinyalnya yang diikuti dengan segera peningkatan panjang otot. Hal ini merupakan komponen statis stretch refleks. Serabut tas nuklear (nuclear bag fibers) berkumpul ditengah otot sehingga mereka lebih elastis. Nerve ending stretching pada serabut ini terbungkus di daerah tengah yang memanjang dengan cepat saat serabut otot terulur. (Sudarsono,2011)
2.3.3 Teknik Aplikasi Contrax Relax Stretching
Contract relax stretching adalah salah satu dari Fascilitation Proprioceptive Neuromuscular (PNF) yang melibatkan kontraksi isotonic yang optimal dari kelompok otot antagonis yang memendek dan dilanjutkan relaksasi otot tersebut dengan menggunakan (prinsip reciproke inhibition) (sudarsono,2011).
Persiapan :
a. Pasien dalam posisi tidur terlentang, pastikan subjek merasa nyaman dengan posisi tersebut.
Aplikasi :
a. Gerakkan anggota tubuh hingga akhir ROM secara aktif atau pasif.
b. Tanpa melepaskan posisi tersebut, minta subjek berkontraksi secara isotonik sementara terapis memberikan block dengan tahanan.
d. Selama subjek rileks, terapis menggerakkan ke dalam ROM aktif atau pasif yang baru selama 20 detik.
e. Ulangi rangkaian gerakan tersebut sampai tidak tercapai lagi ROM yang lebih jauh lagi.
A B
C D
Gambar 2.15 Contrax Relax Stretching (A. Otot hamstrings, B. otot quadriceps, C. otot abductor hip, D. otot adductor hip) (McAtee dan Charland, 1999)
2.5 Slump Stretch
2.5.1 Definisi Slump Stretch
Slump stretch merupakan salah satu teknik mobilisasi Saraf (Neuro Mobilization atau Neurodynamic) yang tujuannya menggerakan dan mengulur jaringan saraf terhadap jaringan interface di sekitarnya (Ashok, 2011).
Untuk menyelidiki mengapa slump stretching dapat menjadi terapi pada penaganan strain otot hamstring tingkat 1 (Grade 1 hamstring strains), sebuah penelitian menguji efek slump stretch pada aliran keluar simpatis/ sympathetic outflow pada anggota gerak bawah 10 orang normal dan atlet atletik (bersama dengan beberapa hal lain, saraf simpatis menyebabkan penyempitan pembuluh darah pada kulit dan pelebaran pembuluh darah pada otot, yang mungkin terlibat pada proses penyembuhan jaringan otot). Gambaran Telethermographic diambil pada empat lokasi sebelum dan setelah peregangan pada kedua sisi tungkai yang diregang maupun yang tidak. Gambaran ini menunjukkan perubahan pada temperatur kulit sebagai respon terhadap refleks. Peningkatan temperatur kulit pada tungkai yang diulur mengindikasikan bahwa efek vasodilator secara signifikan terjadi pada tungkai ini, sementara pada tungkai yang tidak diulur menunjukkan sedikit penurunan temperatur sehingga peneliti berkesimpulan bahwa slump stretching dapat mempunyai efek penghambatan simpatik yang dapat menjadi mekanisme fisiologis