PETUNJUK PRAKTIKUM
P
RAKTIKUM
S
ISTEM
K
ENDALI
Sekolah Teknik Elektro dan Informatika
Institut Teknologi Bandung
2021
Laboratorium Dasar
Teknik Elektro
MODUL PRAKTIKUM
SISTEM KENDALI
Disusun Oleh:
Arief Syaichu Rohman
Adi Novitarini
LABORATORIUM SISTEM KENDALI DAN KOMPUTER
SEKOLAH TEKNIK ELEKTRO DAN INFORMATIKA
INSTITUT TEKNOLOGI BANDUNG
2021
Modul 2 SISTEM KENDALI KECEPATAN 2.1 Tujuan
Tujuan dari percobaan ini adalah memahami konsep pengendalian kecepatan motor DC. Agar pemahaman dari konsep pengendalian motor bisa tercapai, maka dalam percobaan ini diharapkan mampu untuk:
1. menghitung, mengimplementasikan, dan menganalisis pengaruh parameter kendali agar sistem yang akan dikendalikan mampu memenuhi spesifikasi yang diinginkan
2. mengidentifikasi pengaruh integral pada sistem yang diberikan gangguan berupa sinyal step 3. mengevaluasi parameter kendali yang paling efisien jika diterapkan untuk kendali kecepatan motor
DC, jika ditinjau dari sinyal kendali yang dihasilkan
2.2 Dasar Teori
2.2.1 Pengendalian kecepatan
Dari percobaan modul sebelumnya telah didapat model motor DC yang memberikan hubungan antara tegangan input motor 𝑉𝑚 dengan kecepatan putaran 𝜔𝑚 dalam domain Laplace sebagaimana dinyatakan dalam persamaan berikut:
𝜔𝑚 𝑉𝑚
= 𝐾
𝜏𝑠 + 1
(2.1)
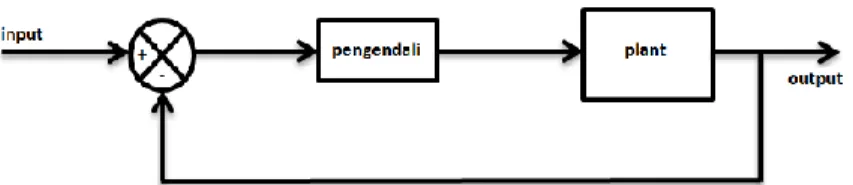
Pada dasarnya terdapat dua jenis sistem pengendalian, yaitu pengendalian lingkar terbuka dan pengendalian lingkar tertutup. Pada pengendalian lingkar terbuka, keluaran sistem tidak diumpan balikkan untuk dibandingkan dengan sinyal referensi. Berikut ini adalah gambar diagram blok sistem pengendalian lingkar terbuka:
Gambar 2. 1 Diagram blok sistem pengendalian lingkar terbuka
Sedangkan pada pengendalian lingkar tertutup, keluaran sistem diumpan balikkan untuk dibandingkan dengan sinyal referensi. Hal ini berguna agar keluaran sistem bisa sesuai dengan sinyal referensi. Gambar diagram blok sistem pengendalian lingkar tertutup bisa dilihat pada Gambar 2.2.
Sebelum melakukan perancangan suatu sistem pengendalian, baik lingkar terbuka atau lingkar tertutup, kestabilan sistem harus menjadi bahasan yang dikaji terlebih dahulu. Kita harus mengetahui pada rentang mana pengendali yang kita desain bisa menyebabkan sistem menjadi tidak stabil. Hal ini penting mengingat pengendali yang kita rancang harus bisa menjamin agar sistem pengendalian tetap stabil sehingga plant yang dikendalikan tidak rusak. Salah satu metode dasar dalam menganalisis kestabilan dari suatu sistem adalah menggunakan Kriteria Stabilitas Routh (Routh Stability Test). Metode Routh Stability Test dapat dipelajari pada referensi nomor (6) dan (8).
Gambar 2. 2 Diagram blok sistem pengendalian lingkar tertutup
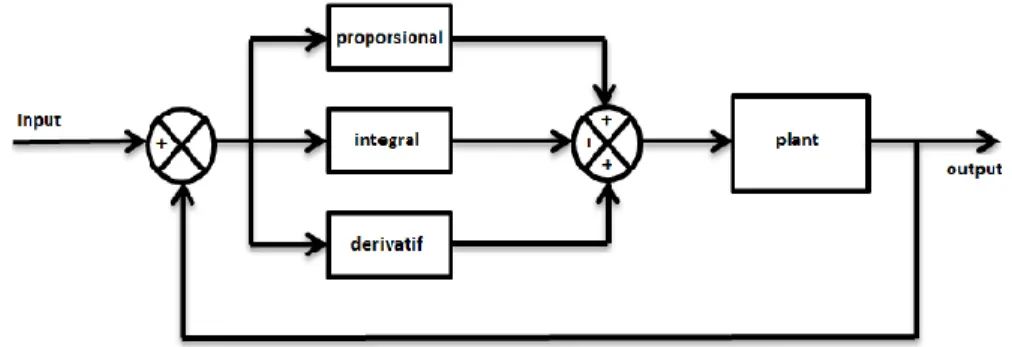
2.2.2 Pengendali PID
Sistem pengendali PID (Proporsional Integral Derivatif) merupakan suatu sistem pengendali yang digunakan secara luas di berbagai bidang industri. Pengendali PID terdiri dari 3 komponen pengendali, yaitu proporsional, integral, dan derivatif.
● Proporsional
Dalam domain waktu kontinyu, hubungan antara sinyal error 𝑒 dengan sinyal kontrol 𝑢 dinyatakan dalam persamaan berikut:
𝑢(𝑠) 𝑒(𝑠) = 𝐾𝑝 (1 + 1 𝜏𝑖𝑠+ 𝜏𝑑 𝑠) (2.2) 𝑢(𝑡) = 𝐾𝑝 . 𝑒(𝑡)
Dari persamaan (2.1) terlihat bahwa pengendali proporsional menghasilkan sinyal kontrol berupa sinyal error yang dikalikan (proporsional) dengan konstanta proporsional 𝐾𝑝. Pengendali proporsional digunakan untuk memperbesar penguatan dan mempercepat respon transien.
● Integral
Dalam pengendali integral, nilai error 𝑒 diumpankan sebagai laju perubahan sinyal kontrol 𝑢 sebagaimana dinyatakan dalam persamaan berikut ini:
𝑢(𝑡) = 𝐾𝑝 ( 1 𝜏𝑖𝑠 ) ∫ 𝑡 0 𝑒(𝑡)𝑑𝑡 (2.3)
Pengendali integral berfungsi untuk menghilangkan galat atau steady state error meskipun juga dapat menyebabkan terjadinya overshoot dan osilasi yang mengakibatkan keadaan tunak lama dicapai.
● Derivatif
Pengendali derivatif akan memberikan suatu sinyal kontrol 𝑢 yang bersesuaian dengan laju perubahan sinyal error 𝑒 sebagaimana dinyatakan dalam persamaan berikut ini:
𝑢(𝑡) = 𝐾𝑝(𝜏𝑑 ) 𝑑 𝑒(𝑡)
𝑑𝑡
(2.4) Sistem pengendali PID bisa berupa kombinasi antara proporsional, integral, dan derivatif, bergantung pada respon sistem yang diinginkan. Apabila ketiga jenis pengendali tersebut digunakan, maka persamaan yang menyatakan antara sinyal eror 𝑒 dengan sinyal kontrol 𝑢 dalam domain waktu kontinyu adalah: (𝑡) = 𝐾𝑝 (𝑒(𝑡) + (1 𝜏𝑖) ∫ 𝑡 0 𝑒(𝑡) 𝑑𝑡 + (𝜏𝑑)𝑑 𝑒(𝑡) 𝑑𝑡 ) (2.5)
Dalam domain Laplace dinyatakan sebagai: 𝑈(𝑠)
𝐸(𝑠)= 𝐾𝑝 (1 + 1
𝜏𝑖𝑠+ 𝜏𝑑 𝑠)
(2.6) Berikut ini adalah diagram blok sistem secara umum yang menggunakan pengendali PID:
Gambar 2. 3 Diagram blok sistem lingkar tertutup dengan pengendali PID
2.2.3 Saturasi
Implementasi pengendali PID memerlukan rangkaian saturasi, hal ini dimaksudkan agar sinyal kendali yang masuk ke motor DC tidak melebihi batas tegangan yang dibutuhkan motor DC. Tegangan yang melebihi kapasitas motor, dapat menyebabkan kerusakan pada motor tersebut. Dimana rangkaian yang digunakan seperti berikut dan batas saturasi yang diberikan adalah +5V dan -5V
2.3 Alat dan komponen yang digunakan
1. Personal computer yang telah terinstall software MATLAB 2. Buku catatan laboratorium.
2.4 Tugas pendahuluan
1. Jelaskan perbedaan antara sistem pengendalian lingkar terbuka dengan pengendalian lingkar tertutup!
2. Apa kekurangan dan kelebihan bila mengendalikan sistem dengan menggunakan pengendalian P (Proporsional)? Apa kekurangan dan kelebihan bila mengendalikan sistem dengan menggunakan pengendalian PI (Proporsional-Integral)?
3. Apa yang disebut dengan metode Tuning PID?
4. Motor DC terdiri dari beberapa parameter seperti resistansi, induktansi, arus jangkar, dan lain sebagianya. Jika digambakan ke dalam blok diagram menjadi seperti ini.
Gambarkan ke bentuk signal flow graph (diagram Mason) kemudian definisikan : a. Jumlah forward path.
b. Gain pada setiap feedforward path.
c. Berikan penjelasan mengenai non-touching loop, apakah pada sistem ini terdapat non-touching loop?
d. Fungsi alih yang didapatkan dari penyederhanaan SFG.
𝜔𝑚 𝑣𝑚 = 𝑘𝑡 𝑅𝑚𝐷𝑚 𝐽𝑚 𝐷𝑚𝑠 + 1
Dan pengendali PID yang merupakan bentuk khusus dari persamaan (2.5), gambarlah diagram blok skema sistem kendali kecepatan motor DC dengan pengendali PID.
6. Turunkan juga fungsi transfer sistem lingkar tertutupnya di soal nomor 5. Dengan nilai 𝑅𝑚, 𝐷𝑚, 𝐽𝑚, dan 𝐾𝑡 yang diperoleh dari percobaan sebelumnya, turunkan fungsi transfer sistem tertutupnya secara lengkap serta gambarkan Signal Flow Graph dan diagram blocknya (akan lebih baik jika penyelesaian sampai reduksi diagram blocknya).
7. Apakah mungkin sebuah sistem yang telah dikendalikan menggunakan metode root locus memiliki pole yang terletak di luar locus? Jelaskan pendapat Anda!
2.5 Percobaan 2.5.1 Persiapan
Buka file simulink yang telah digunakan pada modul 1.
2.5.2 Pengendali loop terbuka
2. Cek apakah data tersebut masih valid, seperti minggu lalu (tidak terjadi error saat di run).
2.5.2.1 Tanpa gangguan
1. Tambahkan pengendali proporsional sebelum masuk ke plant, dan jangan dibuat feedback pada sistem pengendali tersebut.
2. Beri nilai Kp=1 pada command window. Dengan mengambil plot respon output dengan input terhadap waktu, catat nilai steady state, nilai error steady state, waktu ketika steady
state, dan nilai rise time. Nilai rise time merupakan waktu yang dibutuhkan sistem dari 10%
sampai 90% dari nilai steady state dimana sistem dianggap sistem overdamped (Ogata, Katsuhito).
3. Ulangi percobaan diatas dengan dua nilai Kp yang berbeda namun berada di rentang 0<Kp<2.
2.5.2.2 Dengan gangguan sinyal step
1. Tambahkan gangguan berupa fungsi step pada sistem setelah plant, seperti gambar dibawah.
2. Atur sinyal gangguan muncul pada waktu t = 5s dengan besar 2V. Gunakan nilai Kp=1. Dengan mengambil plot respon output dengan input terhadap waktu, catat nilai steady state,
nilai error steady state, waktu ketika steady state, dan nilai rise time. Nilai rise time merupakan waktu yang dibutuhkan sistem dari 10% sampai 90% dari nilai steady state dimana sistem dianggap sistem overdamped (Ogata, Katsuhito).
3. Ulangi percobaan diatas dengan dua nilai Kp yang berbeda namun berada di rentang 0<Kp<2.
2.5.3 Pengendali loop tertutup
Tambahkan feedback pada sistem pengendali. 2.5.3.1 Tanpa gangguan
1. Susun block diagram pada simulink seperti pada gambar dibawah ini.
2. Simpan data dari Scope ke dalam bentuk Array ke dalam Workspace melalui cara berikut ini : klik dua kali pada scope kemudian pilih toolbar pilih Configuration Properties lalu pilih box Logging, checklist pilihan Log data into workspace, beri nama variabel misalnya
outputResponse (pada scope output) dan controlSig (pada scope Control Signal), kemudian
ubah format data menjadi Array lalu OK. Lalu RUN simulink lagi hingga muncul di workspace sebagai berikut :
3. Plot controlSig dan outputResponse >> subplot(211) >> plot(outputResponse(:,1),outputResponse(:,2),'LineWidth',2); >> hold on >> plot(outputResponse(:,1),outputResponse(:,3),'r','LineWidth',2); >> legend('setpoint','output response') >> xlabel('time');
>> ylabel('output') >> ylim([0 1.2]) >> grid on >> subplot(212) >> plot(controlSig(:,1),controlSig(:,2),'-.k','Linewidth',2) >> xlabel('time'); >> ylabel('control signal') >> grid on
4. Gunakan nilai Kp=1. Dengan mengambil plot respon output dengan input terhadap waktu, catat nilai steady state, nilai error steady state, waktu ketika steady state, dan nilai rise time. Nilai rise time merupakan waktu yang dibutuhkan sistem dari 10% sampai 90% dari nilai steady state dimana sistem dianggap sistem overdamped (Ogata, Katsuhito).
5. Ulangi percobaan diatas dengan dua nilai Kp yang berbeda namun berada di rentang 1<Kp<10
2.5.3.2 Dengan gangguan sinyal step
2. Simpan data dari Scope ke dalam bentuk Array ke dalam Workspace melalui cara berikut ini : klik dua kali pada scope kemudian pilih toolbar pilih Configuration Properties lalu pilih box Logging, checklist pilihan Log data into workspace, beri nama variabel misalnya
outputResponse (pada scope output) dan controlSig (pada scope Control Signal), kemudian
ubah format data menjadi Array lalu OK. Lalu RUN simulink lagi hingga muncul di workspace sebagai berikut :
3. Plot controlSig dan outputResponse >> subplot(211) >> plot(outputResponse(:,1),outputResponse(:,2),'LineWidth',2); >> hold on >> plot(outputResponse(:,1),outputResponse(:,3),'r','LineWidth',2); >>hold on >> plot(outputResponse(:,1),outputResponse(:,4),'*m','LineWidth',2); >> legend('setpoint','output response',’disturbance’) >> xlabel('time'); >> ylabel('output') >> grid on >> subplot(212) >> plot(controlSig(:,1),controlSig(:,2),'-.k','Linewidth',2)
>> xlabel('time');
>> ylabel('control signal') >> grid on
4. Atur sinyal gangguan muncul pada waktu t = 5s dengan besar 2V. Gunakan nilai Kp=1. Dengan mengambil plot respon output dengan input terhadap waktu, catat nilai steady state, nilai error steady state, waktu ketika steady state, dan nilai rise time. Nilai rise time merupakan waktu yang dibutuhkan sistem dari 10% sampai 90% dari nilai steady state dimana sistem dianggap sistem overdamped (Ogata, Katsuhito).
5. Ulangi percobaan diatas dengan dua nilai Kp yang berbeda namun berada di rentang 1<Kp<10.
2.5.4 Kendali Proporsional dan Integral 2.5.4.1 Tanpa gangguan
2. Simpan data dari Scope ke dalam bentuk Array ke dalam Workspace melalui cara berikut ini : klik dua kali pada scope kemudian pilih toolbar pilih Configuration Properties lalu pilih box Logging, checklist pilihan Log data into workspace, beri nama variabel misalnya
outputResponse (pada scope output) dan controlSig (pada scope Control Signal), kemudian
ubah format data menjadi Array lalu OK. Lalu RUN simulink lagi hingga muncul di workspace sebagai berikut :
3. Plot controlSig dan outputResponse >> subplot(211) >> plot(outputResponse(:,1),outputResponse(:,2),'LineWidth',2); >> hold on >> plot(outputResponse(:,1),outputResponse(:,3),'r','LineWidth',2); >> legend('setpoint','output response') >> xlabel('time'); >> ylabel('output') >> grid on >> subplot(212) >> plot(controlSig(:,1),controlSig(:,2),'-.k','Linewidth',2) >> xlabel('time'); >> ylabel('control signal')
>> grid on
4. Gunakan nilai Kp=1 dan Ti = 0.2. Dengan mengambil plot respon output dengan input terhadap waktu, catat nilai steady state, nilai error steady state, waktu ketika steady state, dan nilai rise time. Nilai rise time merupakan waktu yang dibutuhkan sistem dari 10% sampai 90% dari nilai steady state dimana sistem dianggap sistem overdamped (Ogata, Katsuhito).
5. Ulangi percobaan diatas dengan dua nilai Ti yang berbeda namun berada di rentang 0.2<Ti<0.6.
2.5.4.1 Dengan gangguan sinyal step
1. Susun block diagram pada simulink seperti pada gambar dibawah ini.
2. Simpan data dari Scope ke dalam bentuk Array ke dalam Workspace melalui cara berikut ini : klik dua kali pada scope kemudian pilih toolbar pilih Configuration Properties lalu pilih box Logging, checklist pilihan Log data into workspace, beri nama variabel misalnya
outputResponse (pada scope output) dan controlSig (pada scope Control Signal), kemudian
ubah format data menjadi Array lalu OK. Lalu RUN simulink lagi hingga muncul di workspace sebagai berikut :
3. Atur sinyal gangguan muncul pada waktu t = 5s dengan besar 2V. Gunakan nilai Kp=1 dan Ti = 0.2. Dengan mengambil plot respon output dengan input terhadap waktu, catat nilai steady state, nilai error steady state, waktu ketika steady state, dan nilai rise time. Nilai rise time merupakan waktu yang dibutuhkan sistem dari 10% sampai 90% dari nilai steady state dimana sistem dianggap sistem overdamped (Ogata, Katsuhito).
4. Plot controlSig dan outputResponse >> subplot(211) >> plot(outputResponse(:,1),outputResponse(:,2),'LineWidth',2); >> hold on >> plot(outputResponse(:,1),outputResponse(:,3),'r','LineWidth',2); >>hold on >> plot(outputResponse(:,1),outputResponse(:,4),'*m','LineWidth',2); >> legend('setpoint','output response',’disturbance’) >> xlabel('time'); >> ylabel('output') >> grid on >> subplot(212) >> plot(controlSig(:,1),controlSig(:,2),'-.k','Linewidth',2) >> xlabel('time'); >> ylabel('control signal') >> grid on
5. Ulangi percobaan diatas dengan dua nilai Ti yang berbeda namun berada di rentang 0.2<Ti<0.6.
2.5.5 Kendali Proporsional dan Derivatif 2.5.5.1 Tanpa gangguan
1. Susun block diagram pada simulink seperti pada gambar dibawah ini.
2. Simpan data dari Scope ke dalam bentuk Array ke dalam Workspace melalui cara berikut ini : klik dua kali pada scope kemudian pilih toolbar pilih Configuration Properties lalu pilih box Logging, checklist pilihan Log data into workspace, beri nama variabel misalnya
outputResponse (pada scope output) dan controlSig (pada scope Control Signal), kemudian
ubah format data menjadi Array lalu OK. Lalu RUN simulink lagi hingga muncul di workspace sebagai berikut :
3. Plot controlSig dan outputResponse >> subplot(211) >> plot(outputResponse(:,1),outputResponse(:,2),'LineWidth',2); >> hold on >> plot(outputResponse(:,1),outputResponse(:,3),'r','LineWidth',2); >> legend('setpoint','output response') >> xlabel('time'); >> ylabel('output') >> grid on >> subplot(212) >> plot(controlSig(:,1),controlSig(:,2),'-.k','Linewidth',2) >> xlabel('time'); >> ylabel('control signal') >> grid on
4. Gunakan nilai Kp=1 dan Td = 2. Dengan mengambil plot respon output dengan input terhadap waktu, catat nilai steady state, nilai error steady state, waktu ketika steady state, dan nilai rise time. Nilai rise time merupakan waktu yang dibutuhkan sistem dari 10% sampai 90% dari nilai steady state dimana sistem dianggap sistem overdamped (Ogata, Katsuhito).
5. Ulangi percobaan diatas dengan dua nilai Td yang berbeda namun berada di rentang 2<Td<22.
2.5.5.2 Dengan gangguan sinyal step
1. Susun block diagram pada simulink seperti pada gambar dibawah ini. Dimana block saturation diberi batasan nilai +5 dan -5.
2. Simpan data dari Scope ke dalam bentuk Array ke dalam Workspace melalui cara berikut ini : klik dua kali pada scope kemudian pilih toolbar pilih Configuration Properties lalu pilih
box Logging, checklist pilihan Log data into workspace, beri nama variabel misalnya
outputResponse (pada scope output) dan controlSig (pada scope Control Signal), kemudian
ubah format data menjadi Array lalu OK. Lalu RUN simulink lagi hingga muncul di workspace sebagai berikut :
3. Plot controlSig dan outputResponse >> subplot(211) >> plot(outputResponse(:,1),outputResponse(:,2),'LineWidth',2); >> hold on >> plot(outputResponse(:,1),outputResponse(:,3),'r','LineWidth',2); >>hold on >> plot(outputResponse(:,1),outputResponse(:,4),'*m','LineWidth',2); >> legend('setpoint','output response',’disturbance’) >> xlabel('time'); >> ylabel('output') >> grid on >> subplot(212) >> plot(controlSig(:,1),controlSig(:,2),'-.k','Linewidth',2) >> xlabel('time'); >> ylabel('control signal') >> grid on
4. Atur sinyal gangguan muncul pada waktu t = 5s dengan besar 2V. Gunakan nilai Kp = 1 dan Td = 2. Dengan mengambil plot respon output dengan input terhadap waktu, catat nilai steady state, nilai error steady state, waktu ketika steady state, dan nilai rise time. Nilai rise time merupakan waktu yang dibutuhkan sistem dari 10% sampai 90% dari nilai steady state dimana sistem dianggap sistem overdamped (Ogata, Katsuhito).
5. Ulangi percobaan diatas dengan dua nilai Td yang berbeda namun berada di rentang 2<Td<22.
2.5.6 Merancangan PID
1. Rancanglah sistem dengan %Overshoot sebesar 20% dan settling time sebesar 1,5 detik dengan 5% criterion.
2. Hitung nilai rasio redaman dan frekuensi natural yang diperoleh dari persyaratan tersebut menggunakan persamaan berikut.
%𝑂𝑆 = 𝑒 −𝜋𝜁 √1−𝜁2 (1) 𝑇𝑠(5% 𝑐𝑟𝑖𝑡𝑒𝑟𝑖𝑜𝑛) = 3 𝜁𝜔𝑛 (2) 3. Masukkan nilai K dan konstanta waktu yang telah diperoleh dari modul 1. Dengan plot root locus
4. Dengan memasukkan parameter fungsi transfer, didapatkan persamaan plant motor DC sebagai berikut. Misalkan nilai K = 0.9949 dan 𝜏 = 1.9893.
𝐺𝑐(𝑠) = 𝐾 𝜏𝑠 + 1=
0.9949 1.9893𝑠 + 1
(4) 5. Untuk mengetahui pengaruh Kp terhadap plant, dibuat root locus pada MatLab dengan mengetik
code berikut.
6. Cek apakah melalui plot Root Locus diperoleh nilai redaman dan ωn yang diinginkan. Jika tidak tercapai, maka gunakan kontroler PID seperti pada gambar dibawah.
𝐺𝑜𝑝𝑒𝑛(𝑠) = 𝐾𝑝 (1 + 1 𝑠 𝑇𝑖+ 𝑇𝑑 𝑠) ( 0.9949 1.9893𝑠 + 1) = 𝐾𝑝 0.0398𝑠2+ 0.199𝑠 + 0.9949 0.39786𝑠2+ 0.2 𝑠
7. Dengan fungsi transfer open loop pada persamaan (4), digambarkan kembali root locusnya:
8. Untuk mengamati pole-pole yang ada pada root locus, digunakan: >> [r,k] = rlocus(sys)
9. Dari data tersebut, carilah letak pole yang memenuhi redaman dan ωn yang diinginkan sesuai persamaan (1) dan (2), dengan rumus berikut.
𝑠1,2= −𝜁𝜔𝑛± 𝑗𝜔𝑛√1 − 𝜁2 𝑠1,2 = −1.999 ± 𝑗3.913
10. Terlihat bahwa nilai yang mendekati terletak di kolom ke 13. Sehingga untuk mendapatkan nilai Kp yang diperlukan, gunakan perintah sebagai berikut.
12. Isi nilai Ti=0.2 dan Ti = Td. Gunakan nilai Kp yang telah diperoleh sebelumnya dan masukan nilainya.
13. apabila diberi gangguan berupa sinyal step = 2 pada, susun block diagram sebagai berikut
14. Apakah nilai overshoot dan time settling yang diperoleh sudah sesuai dengan perancangan? 15. Lakukan percobaan point 13, jika diberi gangguan sinyal step =2 dan t=5 detik.
16. Dari hasil respon pada point 12,13 dan 16, berikan komentar anda!
17. Hitung nilai %Overshoot dan time settling. Pada contoh grafik nilai diatas, diperoleh : %𝑂𝑆 =6.468 − 5
5 × 100% = 29.36%
(5)
18. Apakah nilai %Overshoot dan Time settling sudah sesuai dengan perancangan? Analisislah mengapa jika sama/berbeda!
19. Tentukan juga nilai %Overshoot dan time settling setelah diberi gangguan. Analisislah apa yang dapat diamati setelah diberi gangguan tersebut.