BAB 2
LANDASAN TEORI
2.1 Ergonomi
Istilah ergonomi berasal dari bahasa Latin yaitu ERGON yang berarti KERJA dan NOM OS yang berarti HUKUM ALAM dan dapat didefinisikan sebagai studi tentang aspek-aspek manusia dalam lingkungan kerjanya yang ditinjau secara anatomi, fisiologi, psikologi, engineering, manajemen dan desain atau perancangan. Ergonomi berkenaan pula dengan optimasi, efisiensi, kesehatan dan kenyamanan manusia di tempat kerja, di rumah, dan tempat rekreasi. Di dalam ergonomi dibutuhkan studi tentang sistem dimana manusia, fasilitas kerja dan lingkungannya saling berinteraksi dengan tujuan utama yaitu menyesuaikan suasana kerja dengan manusianya. Oleh karena itu Ergonomi juga disebut juga sebagai “Human Faktor”.
Penerapan Ergonomi pada umumnya merupakan aktivitas rancang bangun atau desain ataupun rancang ulang atau re-desain. Hal ini dapat meliputi perangkat keras seperti misalnya perkakas kerja (tools), bangku kerja (benches), platform, kursi, pegangan alat kerja (workholder), sistem pengendali (controls), alat peraga (display), jalanatau lorong (access ways), pintu (doors) jendela (windows), dan lain-lain.
Ergonomi dapat berperan pula sebagai desain pekerjaan pada suatu organisasi, misalnya : penentuan jumlah jam istirahat, pemilihan jadwal pergantian waktu kerja (shift kerja), meningkatkan variasi pekerjaan, dan lain-lain. Ergonomi dapat pula berfungsi sebagai dasar perangkat lunak karena dengan semakin banyaknya pekerjaan yang berkaitan erat dengan komputer. Penyampaian informasi dalam suatu sistem computer harus pula diusahakan sekompatibel mungkin sesuai dengan kemampuan pemrosesan informasi oleh manusia. Disamping itu juga Ergonomi memberikan peranan penting dalam meningkatkan faktor keselamatan dan kesehatan kerja, misalnya : desain suatu sistem kerja untuk mengurangi rasa nyeri dan ngilu pada sistem kerangka dan otot manusia, desain stasiun kerja untuk alat peraga visual (visual display unit stasion). Hal itu adalah untuk mengurangi ketidak nyamanan visual dan postur kerja, desain suatu perkakas kerja (handtools) untuk mengurangi kelelahan kerja, desain suatu peletakan instrument dan sistem pengendalian agar didapat optimasi dalam proses transfer informasi dengan dihasilkannya suatu respon yang cepat dengan meminimumkan resiko kesalahan, serta supaya didapatkan optimasi, efisiensi kerja dan hilangnya resiko kesehatan akibat metoda kerja yang kurang tepat. Pekerja yang memiliki postur kerja yang ergonomis maka akan dapat bekerja dengan ENASE (Efektif, Nyaman ,Aman, Sehat, Efisien)
Penerapan faktor Ergonomi lainnya yang tidak kalah penting adalah untuk desain dan evaluasi produk. Produk-produk ini haruslah dapat dengan mudah diterapkan (dimengerti dan digunakan) pada sejumlah populasi masyarakat tertentu tanpa mengakibatkan bahaya atau resiko dengan penggunaannya.
2.2 Dasar Keilmuan dari Ergonomi
Banyak penerapan ergonomi yang hanya berdasarkan sekedar “common sense” (dianggap suatu hal yang sudah biasa terjadi), dan hal itu benar, jika sekiranya suatu keuntungan yang besar bisa didapat hanya sekedar dengan penerapan suatu prinsip yang sederhana. Hal ini biasanya merupakan kasus dimana ergonomi belum dapat diterima sepenuhnya sebagai alat untuk proses desain, akan tetapi masih banyak aspek ergonomi yang jauh dari kesadaran manusia. Karakteristik fungsional dari manusia seperti kemampuan penginderaan, waktu respon/tanggapan, daya ingat, posisi optimum tangan dan kaku untuk efisiensi kerja otot, dan lain-lain adalah merupakan suatu hal yang belum sepenuhnya dipahami oleh masyarakat awam.
Ilmu-ilmu terapan yang banyak berhubungan dengan fungsi tubuh manusia adalah anatomi dan fisiologi. Untuk menjadi ergonom diperlukan pengetahuan dasar tentang fungsi dari sistem kerangka otot. Yang berhubungan dengan hal tersebut adalah Kinesiologi Biomekanika ( aplikasi ilmu mekanika teknik untuk analisis sistem kerangka-otot manusia).
Ilmu-ilmu ini akan memberikan modal dasar untuk mengatasi masalah postur dan pergerakan manusia di tempat dan ruang kerjanya.
Disamping itu, suatu hal yang vital pada penerapan ilmiah untuk ergonomi adalah Anthopometri (kalibrasi tubuh manusia). Menurut Stevenson pada
tahun 1989 dan Nurmianto pada tahun 1991, Anthropometri adalah satu kumpulan data numeric yang berhubungan dengan karakteristik fisik tubuh manusia ukuran, bentuk dan kekuatan serta penerapan dari data tersebut untuk penanganan masalah desain. Dalam hal ini terjadi
penggabungan dan pemakaian data anthopometri dengan ilmu-ilmu statistik yang menjadi prasyarat utamanya.
Aspek-aspek ergonomi dalam suatu proses rancang bangun fasilitas kerja adalah merupakan suatu faktor penting dalam menunjang peningkatan pelayanan jasa produksi. Perlunya memperhatikan faktor ergonomi dalam proses rancang bangun fasilitas dalam dekade sekarang ini adalah merupakan suatu yang tidak dapat ditunda kembali. Hal tersebut tidak akan terlepas dari pembahasan mengenai ukuran anthropometri tubuh operator maupun penerapan data-data anthopometrinya.
Hal yang perlu diamati adalah seperti misalnya: berat dan pusat massa (centre of gravity) dari suatu segmen atau bagian tubuh, bentuk tubuh, jarak untuk pergerakan melingkar (angular motion) dari tangan dan kaki, dan lain-lain.
2.2.1 Biomekanika
M ekanika adalah salah satu cabang ilmu dari bidang ilmu fisika yang mempelajari gerakan dan perubahan bentuk suatu materi yang diakibatkan oleh gangguan mekanik yang disebut gaya. M ekanika adalah cabang ilmu yang tertua dari semua cabang ilmu dalam fisika. Tersebutlah nama-nama seperti Archimides (287-212 SM ), Galileo Galilei (1564-1642), dan Issac Newton (1642-1727) yang merupakan peletak dasar bidang ilmu ini. Galileo adalah peletak dasar analisa dan eksperimen dalam ilmu dinamika. Sedangkan Newton merangkum gejala-gejala dalam dinamika dalam hukum-hukum gerak dan gravitasi.
M ekanika teknik atau disebut juga dengan mekanika terapan adalah ilmu yang mempelajari peneraapan dari prinsip-prinpsip mekanika. M ekanika terapan mempelajari analisis dan disain dari sistem mekanik.
Biomekanika didefinisikan sebagai bidang ilmu aplikasi mekanika pada system biologi. Biomekanika merupakan kombinasi antara disiplin ilmu mekanika terapan dan ilmu-ilmu biologi dan fisiologi. Biomekanika menyangkut tubuh manusia dan hampir semua tubuh mahluk hidup. Dalam biomekanika prinsip-prinsip mekanika dipakai dalam penyusunan konsep, analisis, disain dan pengembangan peralatan dan sistem dalam biologi dan kedoteran.
Pada dasarnya biomekanika adalah cabang ilmu yang relatif baru dan sedang berkembang secara dinamis. Akan tetapi sebenarnya bidang ilmu sudah eksis sejak abad ke lima belas masehi ketika Leonardo Da Vinci (1452-1519) membuat catatan akan siginikansi mekanika dalam penelitian-penelitian biologi yang dia lakukan. Kontribusi dari para peneliti dalam bidang ilmu biologi, kedokteran, ilmu-ilmu dasar, dan teknik mewarnai perkembangan biomekanika akhir-akhir ini.
Filosof Yunani Aristotle (384-322 SM ) adalah orang yang pertama kali melakukan studi secara sistematik terhadap gerakan tubuh manusia. Banyak prinsip yang mendeskripsikan aksi dan karakteristik gemometri dari otot. Walaupun penemuan Aristotle untuk menerangkan gerakan banyak mengandung kontradiksi, usaha awal yang telah ia ristis menjado pondasi bagi studi berikutnya seperti Galen (131-201), Galileo (1564-1643), Borelli (1608-1679), Newton (1642-1727), dan Marey (1830-1904). Studi dari para filosof dan ilmuwan tersebut telah mengakibatkan kita bisa membuktikan bahwa gerakan tubuh manusia merupakan konsekuensi dari interkasi anatara otot dan gaya yang diakibatkan oleh lingkungan sekitar tubuh manusia. Seperi yang ditulis oleh Aristotle bahwa binatang yang berjalan membuat posisisnya berubah dengan menekan apa yang ada dibawahnya.
Pernyataan ini menekankan bahwa dalam studi gerakan harus menekankan pada (Higgins, 1985):
• Pengkarateran interaksi fisik anatara hewan (manusia) dan lingkungan sekitar.
• M enetukan cara hewan (manusia) mengorganisasikan interkasi fisik tersebut.
Dengan kerangka seperti ini maka gerakan tubuh system biologis dapat diakui sebagai hasil interaksi system biologis dengan lingkungan sekelilingnya. Beberapa faktor berikut turut menentukan interaksi tersebut:
• Stuktur dari lingkunngan (bentuk dan stabilitas).
• M edan dari gaya (arah relatif terhadap gravitasi, kecepatan gerakan).
• Stuktur dari sistem (susunan tulang, aktifitas otot, sususan segment dari tubuh, ukuran, integrasi motorik yang dibutuhkan untuk mendukung postur).
• Peranan dari keadaan psikologis (level keatifan, motivasi).
• Bentuk gerakan yang akan dikerjakan (kerangka dari organisasi dari gerakan).
Higgins menyatakan bahwa gerakan adalah bagian yang tak terpisahkan dengan struktur yang mendukungnya dan lingkungannya.
2.2.1.1 Angular Kinematic
Angular Kinematic atau yang disebut juga dengan kinematic sudut digunakan untuk menghitung sudut-sudut tubuh operator dalam melakukan gerakan.
Terdapat berbagai satuan yang digunakan dalam Angular Kinematic yaitu:
Posisi radian (θ) Kecepatan rad/s (ω) Percepatan rad/s2 (α )
Satuan tersebut digunakan untuk menghitung sudut yang akan dipakai untuk analisa dari gambar
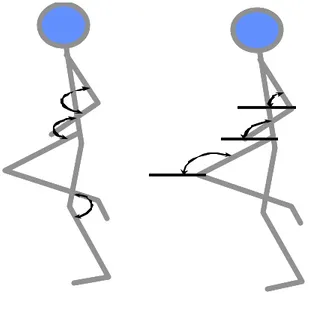
Pengambilan sudut dalam Angular Kinematic dibagi menjadi 2 jenis yaitu dengan perhitungan Relative Angle dan Absolute Angle. Kedua pengambilan sudut ini dibedakan dengan panjang jarak sisi tubuh yang digunakan untuk perhitungan sudut. Untuk Relative Angle sudut yang dihitung antara sumbu longitudinal dari dua segmen tubuh. Contohnya dari segmen
lengan atas dan lengan bawah. Sedangkan untuk Absolute Angle pengambilan sudut dihitung dari salah satu segmen tubuh dan garis lurus sejajar sumbu x yang diambil dari akhir segmen yang dihitung.
Relative Angle Absolute Angle
Gambar 2.1 Relative Angles (Joint Angles) dan Absolute Angles (Segment Angles)
Pengambilan sudut ini digunakan untuk mengetahui besarnya sudut dari tiap-tiap sendi tubuh. Untuk dapat menghitung sudut tersebut dibutuhkan koordinat dari tiap sendi tubuh yang didapat dari pemetaan stig figure untuk dimasukkan kedalam sumbu x dan y.
(x2,y2) (x3,y3) (x4,y4) (x5,y5) (0,0) Y X (x1,y1) (x2,y2) (x3,y3) (x4,y4) (x5,y5) (0,0) Y X (x1,y1)
Gambar 2.2 Koordinat Pada Sendi Tubuh
Dari sumbu yang didapat pada stig figure maka dapat dihitung besarnya sudut pada sendi-sendi dengan perhitungan sebagai berikut:
Untuk mendapatkan Absolute Angles:
⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ = adj opp arctan
θ dimana opp = y2-y1 dan adj = x2-x1
θ
opp
adj
(x
1,y
1)
(x
2,y
2)
θ
opp
adj
θ
opp
adj
(x
1,y
1)
(x
2,y
2)
Untuk mendapatkan Relative Angles dapat menggunakan 2 cara yaitu:
1. Hukum dari Cosinus (ini sangat berguna jika panjang dari segmen tubuh diketahui)
)
(cos
2
2 2 2θ
ab
b
a
c
=
+
−
(
) (
)
2 2 3 2 2 3 x y y x a= − + −(
) (
)
2 1 2 2 1 2 x y y x b= − + −(
) (
)
2 1 3 2 1 3x
y
y
x
c
=
−
+
−
(
) (
)
2 2 3 2 2 3 x y y x a= − + −(
) (
)
2 1 2 2 1 2 x y y x b= − + −(
) (
)
2 1 3 2 1 3x
y
y
x
c
=
−
+
−
θ
(x
1,y
1)
(x
2,y
2)
a
b
c
(x
3,y
3)
θ
(x
1,y
1)
(x
2,y
2)
a
b
c
(x
3,y
3)
2. Perhitungan dari 2 Absolute Angles
)
2
180
(
1
3
θ
θ
θ
=
+
−
θ
1
θ
2
θ
3
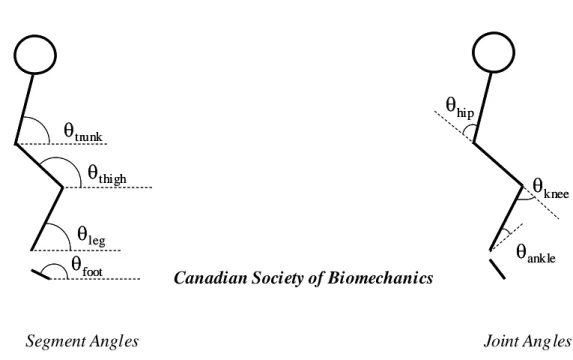
Dalam perhitungan sudut terdapat standar CSB (Canadian Society of Biomechanics) yang digunakan untuk mengatur cara pengambilan gambar serta sudut yang digunakan.
θ
trunkθ
thighθ
legθ
footθ
trunkθ
thighθ
legθ
footCanadian Society of Biomechanics
θ
hipθ
kneeθ
ankleθ
hipθ
kneeθ
ankleSegment Angles Joint Angles
Gambar 2.3 Posisi Anatomi untuk Segment Angles dan Relative Angles dengan Right Sagital View
θ
trunkθ
thighθ
legθ
footθ
trunkθ
thighθ
legθ
footCanadian Society of Biomechanics
θhip θknee θankle θhip θknee θankle
Segment Angles Joint Angles
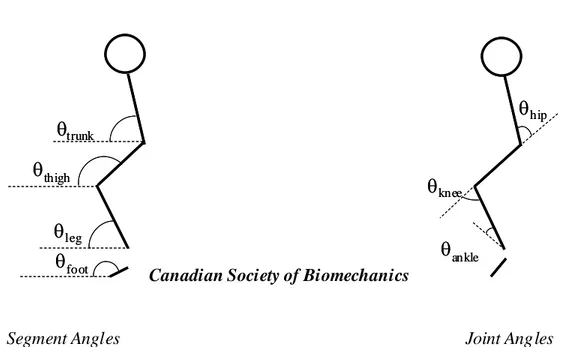
Gambar 2.4 Posisi Anatomi untuk Segment Angles dan Relative Angles dengan Left Sagital View
Untuk dapat menghitung sudut menggunakan CSB juga dapat menggunakan:
θ
hip= θ
thigh- θ
trunkθ
knee= θ
thigh-
θ
legθ
ankle= θ
foot-
θ
leg- 90
o2.2.1.2 Linear Kinematic
Linear Kinematic atau yang disebut kinematic garis digunakan untuk mengetahui pergerakan dari benda tanpa keterkaitan antara masa dan gaya yang mempengaruhi gerakan tersebut. Linear Kinematic mempelajari bagaimana perubahan benda dengan waktu. Satuan di dalam linear kinematic adalah kecepatan dan percepatan. Velocity adalah perpindahan rata-rata dari posisi dan Akselerasi adalah rata-rata perubahan dari kecepatan. Velocity dan Akselerasi adalah dua prinsip utama dalam menjelaskan perubahan posisi.
2.2.2 S truktur Tubuh
Tubuh terdiri dari beberapa struktur yang mendukung diantaranya tulang, otot, kulit, organ tubuh, darah, dan lainnya. Tubuh sendiri memiliki pusat beban masa yang berada di perut bagian bawah.
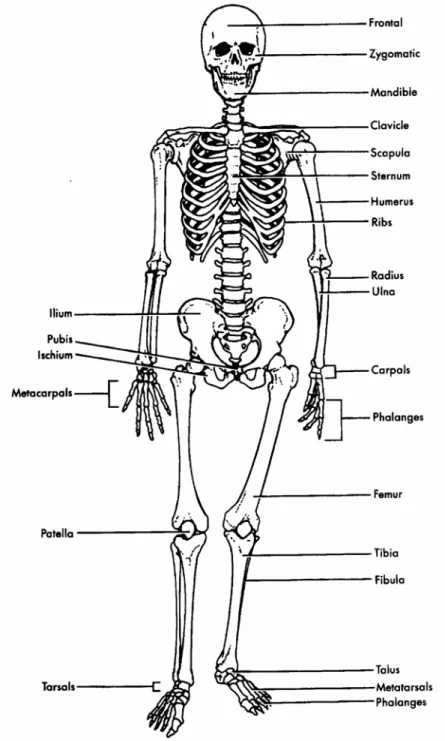
2.2.2.1 Tulang
Tulang adalah salah satu stuktur tubuh paling kuat yang memiliki beberapa fungsi utama, diantaranya sebagai pembuat tubuh menjadi tegak, melindungi organ-organ vital yang ada di dalam tubuh, penghasil sel darah merah, dan tempat penyimpanan lemak dan mineral. Tulang terdiri dari 2 garis besar yaitu axial dan apendicular dan memiliki 3 jenis sel yaitu Ostoeblasts, osteocytes, osteoclasts. Secara garis besar tulang terdiri dari 5 jenis: tulang panjang, tulang pendek, tulang rata, tulang yang bentuknya tidak rata, dan tulang penutup. Terdapat 2 jenis pertumbuhan tulang yaitu secara longitudinal (keatas) dan Circumferential (membesar).
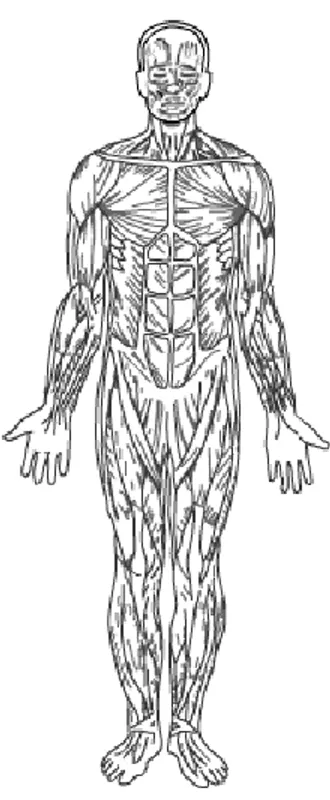
2.2.2.2 Otot
Otot adalah sebuah jaringan konektif dalam tubuh yang memiliki tugas utamanya kontraksi.
Gambar 2.7 Otot Tubuh Manusia
Kontraksi yang dapat dilakukan oleh otot hanya sebatas menarik saja. Otot juga merupakan satu-satunya penggerak yang ada di dalam tubuh yang bertugas mengatur seluruh gerakan dari tubuh. Namun otot harus berada di antara sendi untuk dapat menciptakan gerakan. Selain sebagai alat gerak, otot juga berfungsi sebagai pengatur postur dan posisis tubuh serta sebagai penyeimbang dari sendi. Gerakan-gerakan yang dapat dilakukan oleh otot
diantaranya gerakan isometric, gerakan concentric, dan gerakan eccentric. Jika dalam bekerja, tulang sebagai rangka tubuh terjadi kesalahan posisi dan dilakukan terus-menerus dalam jangka waktu lama maka akan berdampak terjadinya cidera pada otot.
2.2.2.3 Sendi
Sendi adalah hubungan atau sambungan antar tulang sehingga tulang dapat digerakkan. Hubungan antara 2 buah tulang disebut juga persendian (artikulasi). Terdapat 2 macam persendian yaitu:
Sinartrtosis adalah persendian yang tidak memperbolehkan pergerakan. Dapat dibedakan menjadi dua:
• Sinartrosis sinfibrosis: sinartrosis yang tulangnya dihubungkan jaringan ikat fibrosa. Contoh: persendian tulang tengkorak
• Sinartrosis sinkondrosis: sinartrosis yang dihubungkan oleh tulang rawan. Contoh: hubungan antarsegmen pada tulang belakang.
Diartrosis adalah persendian yang memungkinkan terjadinya gerakan. Dapat dikelempokkan menjadi:
• Sendi peluru: persendian yang memungkinkan pergerakan ke segala arah. Contoh: hubungan tulang lengan atas dengan tulang belikat.
• Sendi pelana: persendian yang memungkinkan beberapa gerakan rotasi, namun tidak ke segala arah. Contoh: hubungan tulang telapak tangan dan jari tangan.
• Sendi putar: persendian yang memungkinkan gerakan berputar (rotasi). Contoh: hubungan tulang tengkorak dengan tulang belakang I (atlas).
• Sendi luncur: persendian yang memungkinkan gerak rotasi pada satu bidang datar. Contoh: hubungan tulang pergerlangan kaki.
• Sendi engsel: persendian yang memungkinkan gerakan satu arah. Contoh: sendi siku antara tulang lengan atas dan tulang hasta.
2.2.2.4 Siku
Siku merupakan salah satu bagian dari lutut. Gangguan fungsi siku ini, bisa diakibatkan oleh aktifitas/pekerjaan yang pasif, yang bertumpu pada otot-otot lengan. Misalnya, pekerjaan yang monoton seperti melukis, menulis, dan mengetik. Gangguan ini lebih bersumber pada lengan bawah, yakni sisi luar di bawah sendi siku. Penyakit ini banyak menggangu pekerja wanita yang berusia antara 25-40 tahun. Tetapi, kaum priapun dapat terganggu oleh penyakit ini, khususnya untuk mereka yang pekerjaannya berkaitan dengan angkat berat, penggemar olahraga tenis
dan golf, misalnya. Penyakit ini ditandai dengan adanya rasa nyeri dan sakit pada siku lengan.
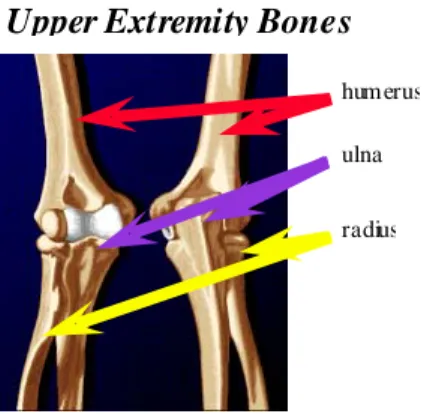
Gambar 2.8 Susunan Siku Manusia
Siku manusia terdiri dari humerus, ulna, dan radius. Dalam siku manusi juga terdapat radioulnar joint yang fungsinya dapat memutar siku.
2.2.2.5 Tulang Punggung
Tulang punggung atau vertebra adalah tulang tak beraturan yang membentuk punggung yang mudah digerakkan. terdapat 33 tulang punggung pada manusia, 5 di antaranya bergabung membentuk bagian sacral, dan 4 tulang membentuk tulang ekor. Tiga bagian di atasnya terdiri dari 24 tulang yang dibagi menjadi 7 tulang cervical (leher), 12 tulang thorax (thoraks atau dada) dan, 5 tulang lumbar.
hum erus ulna
radius
Gambar 2.9 Tulang Belakang Manusia
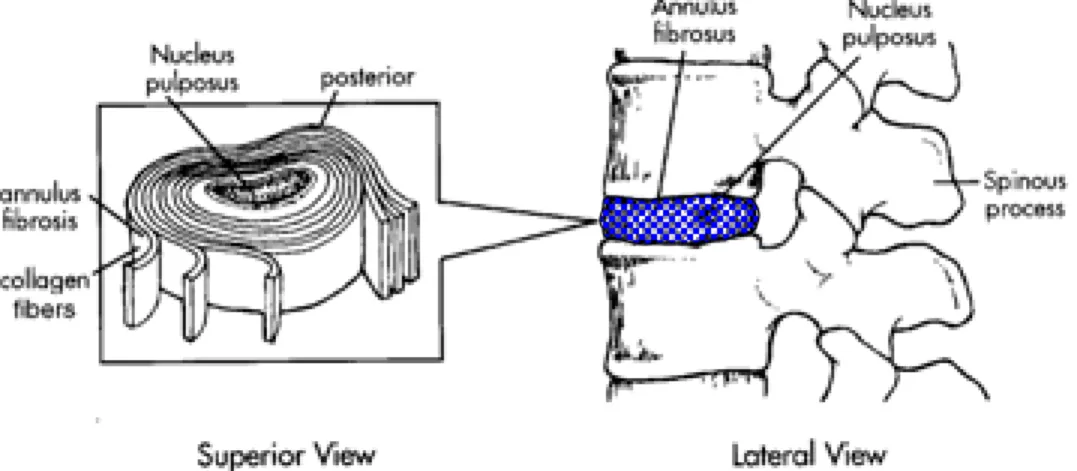
Tulang ini memiliki badan silinder yang berfungsi sebagai tempat otot punggung melekat. Melalui pusat pada setiap vertebra terdapat ruang yang berisi dan melindungi saraf yang berawal dari otak sampai pada kolom vertebra terakhir. Tulang vertebral dipisahkan oleh jaringan yang lebih
halus, yang disebut intervertebral Disks. Intervertebral Disks berfungsi sebagai penghubung, memungkinkan jangkauan besar dari gerakan tulang belakang, walaupun umumnya gerakan menekuk/ membungkuk muncul pada 2 sendi paling bawah, antara lumbar paling bawah dengan sacrum ( Disks L5/S1) dan diatasnya ( Disks L4/L5). Disk ini berfungsi sebagai bantalan antara tulang-tulang vertebral yang membantu melindungi kepala dan otak dari akibat nyeri pada saat berjalan, berlari, atau melompat.
2.2.2.6 Tangan dan Pergelangan Tangan
Dalam anatomi tubuh manusa, pergelangan tangan adalah sambungan antara lengan bagian atas dan telapak tangan. Pergelangan tangan tersusun atas dua tulang pendek, yang disebut carpals.
Carpals Metacarpals Phalanges P M D I II III IV V Radiocarpal Joint Distal Radioulnar Joint
Gambar 2.11 Susunan Pergelangan Tangan Manusia
Dalam pergelangan tangan manusia terdapat dua sendi yang menghubungkan lengan lengan bagian atas dan telapak tangan yaitu radiocarpal joint dan distal radioulnar joint.