BAB 2 Landasan Teori
2. 1. Arduino Uno R3
Arduino Uno R3 adalah papan pengembangan (development board) mikrokontroler yang berbasis chip ATmega328P. Disebut sebagai papan pengembangan karena board ini memang berfungsi sebagai arena prototyping sirkuit mikrokontroller. Dengan menggunakan papan pengembangan, anda akan lebih mudah merangkai rangkaian elektronika mikrokontroller dibanding jika anda memulai merakit ATMega328 dari awal di breadboard.
Arduino Uno memiliki 14 digital pin input / output (atau biasa ditulis I/O, dimana 6 pin diantaranya dapat digunakan sebagai output PWM), 6 pin input analog, menggunakan crystal 16 MHz, koneksi USB, jack listrik, header ICSP dan tombol reset. Hal tersebut adalah semua yang diperlukan untuk mendukung sebuah rangkaian mikrokontroler. Cukup dengan menghubungkannya ke komputer dengan kabel USB atau diberi power dengan adaptor AC-DC atau baterai, anda sudah dapat bermain-main dengan Arduino UNO anda tanpa khawatir akan melakukan sesuatu yang salah. Kemungkinan paling buruk hanyalah kerusakan pada chip ATMega328, yang bisa anda ganti sendiri dengan mudah dan dengan harga yang relatif murah.
Kata " Uno " berasal dari bahasa Italia yang berarti "satu", dan dipilih untuk menandai peluncuran Software Arduino (IDE) versi 1.0. Arduino. Sejak awal peluncuran hingga sekarang, Uno telah berkembang menjadi versi Revisi 3 atau biasa ditulis REV 3 atau R3. Software Arduino IDE, yang bisa diinstall di Windows maupun Mac dan Linux, berfungsi sebagai software yang membantu anda memasukkan (upload) program ke chip ATMega328 dengan mudah.
Spesifikasi
Chip mikrokontroller ATmega328P
Tegangan operasi 5V
Tegangan input (yang direkomendasikan,
via jack DC) 7V - 12V
Tegangan input (limit, via jack DC) 6V - 20V
Digital I/O pin 14 buah, 6 diantaranya menyediakan PWM
Analog Input pin 6 buah
Arus DC per pin I/O 20 mA
Arus DC pin 3.3V 50 mA
Memori Flash 32 KB, 0.5 KB telah digunakan untuk
bootloader SRAM 2 KB EEPROM 1 KB Clock speed 16 Mhz Dimensi 68.6 mm x 53.4 mm Berat 25 g
Open Source Hardware
Arduino Uno adalah hardware open source (OSH - Open Source Hardware). Dengan demikian anda dan siapapun diberi kebebasan untuk dapat membuat sendiri Arduino kita sendiri.
Pemrograman
Pemrograman board Arduino dilakukan dengan menggunakan Arduino Software (IDE) yang bisa anda dapatkan gratis disini. Chip ATmega328 yang
bootloader. Bootloader tersebut yang bertugas untuk memudahkan anda melakukan pemrograman lebih sederhana menggunakan Arduino Software, tanpa harus menggunakan tambahan hardware lain. Cukup hubungkan Arduino dengan kabel USB ke PC atau Mac/Linux anda, jalankan software Arduino Software (IDE), dan anda sudah bisa mulai memrogram chip ATmega328. Lebih mudah lagi, di dalam Arduino Software sudah diberikan banyak contoh program yang memanjakan anda dalam belajar mikrokontroller
Untuk pengguna mikrokontroller yang sudah lebih mahir, anda dapat tidak menggunakan bootloader dan melakukan pemrograman langsung via header ICSP (In Circuit Serial Programming) dengan menggunakan Arduino ISP
Arduino Uno R3 telah dilengkapi dengan chip ATmega16U2 yang telah diprogram sebagai konverter USB to Serial. Firmware ATmega16U2 di load oleh DFU bootloader, dan untuk merubahnya anda dapat menggunakan software Atmel Flip (Windows) atau DFU programmer (Mac OSX dan Linux), atau menggunakan header ISP dengan menggunakan hardware external programmer.
Proteksi
Development board Arduino Uno R3 telah dilengkapi dengan polyfuse yang dapat direset untuk melindungi port USB komputer/laptop anda dari korsleting atau arus berlebih. Meskipun kebanyakan komputer telah memiliki perlindungan port tersebut didalamnya namun sikring pelindung pada Arduino Uno memberikan lapisan perlindungan tambahan yang membuat anda bisa dengan tenang menghubungkan Arduino ke komputer anda. Jika lebih dari 500mA ditarik pada port USB tersebut, sirkuit proteksi akan secara otomatis memutuskan hubungan, dan akan menyambung kembali ketika batasan aman telah kembali.
Power Supply
Board Arduino Uno dapat ditenagai dengan power yang diperoleh dari koneksi kabel USB, atau via power supply eksternal. Pilihan power yang digunakan akan dilakukan secara otomatis
External power supply dapat diperoleh dari adaptor AC-DC atau bahkan baterai, melalui jack DC yang tersedia, atau menghubungkan langsung GND dan pin Vin yang ada di board. Board dapat beroperasi dengan power dari external power supply yang memiliki tegangan antara 6V hingga 20V. Namun ada beberapa hal yang harus anda perhatikan dalam rentang tegangan ini. Jika diberi tegangan kurang dari 7V, pin 5V tidak akan memberikan nilai murni 5V, yang mungkin akan membuat rangkaian bekerja dengan tidak sempurna. Jika diberi tegangan lebih dari 12V, regulator tegangan bisa over heat yang pada akhirnya bisa merusak pcb. Dengan demikian, tegangan yang di rekomendasikan adalah 7V hingga 12V
Beberapa pin power pada Arduino Uno :
GND. Ini adalah ground atau negatif.
Vin. Ini adalah pin yang digunakan jika anda ingin memberikan power langsung ke board Arduino dengan rentang tegangan yang disarankan 7V - 12V
Pin 5V. Ini adalah pin output dimana pada pin tersebut mengalir tegangan 5V yang telah melalui regulator
3V3. Ini adalah pin output dimana pada pin tersebut disediakan tegangan 3.3V yang telah melalui regulator
IOREF. Ini adalah pin yang menyediakan referensi tegangan mikrokontroller. Biasanya digunakan pada board shield untuk memperoleh tegangan yang sesuai, apakah 5V atau 3.3V
Memori
Chip ATmega328 pada Arduino Uno R3 memiliki memori 32 KB, dengan 0.5 KB dari memori tersebut telah digunakan untuk bootloader. Jumlah SRAM 2 KB, dan EEPROM 1 KB, yang dapat di baca-tulis dengan menggunakan EEPROM library saat melakukan pemrograman.
Input dan Output (I/O)
Seperti yang telah disebutkan sebelumnya, Arduino Uno memiliki 14 buah digital pin yang dapat digunakan sebagai input atau output, sengan menggunakan fungsi pinMode(), digitalWrite(), dan digital(Read). Pin-pin tersebut bekerja pada tegangan 5V, dan setiap pin dapat menyediakan atau menerima arus 20mA, dan memiliki tahanan pull-up sekitar 20-50k ohm (secara default dalam posisi disconnect). Nilai maximum adalah 40mA, yang sebisa mungkin dihindari untuk menghindari kerusakan chip mikrokontroller
Beberapa pin memiliki fungsi khusus :
Serial, terdiri dari 2 pin : pin 0 (RX) dan pin 1 (TX) yang digunakan untuk menerima (RX) dan mengirim (TX) data serial.
External Interrups, yaitu pin 2 dan pin 3. Kedua pin tersebut dapat digunakan untuk mengaktifkan interrups. Gunakan fungsi attachInterrupt()
PWM: Pin 3, 5, 6, 9, 10, dan 11 menyediakan output PWM 8-bit dengan menggunakan fungsi analogWrite()
SPI : Pin 10 (SS), 11 (MOSI), 12 (MISO), dan 13 (SCK) mendukung komunikasi SPI dengan menggunakan SPI Library
LED : Pin 13. Pada pin 13 terhubung built-in led yang dikendalikan oleh digital pin no 13.
TWI : Pin A4 (SDA) dan pin A5 (SCL) yang mendukung komunikasi TWI dengan menggunakan Wire Library
Arduino Uno memiliki 6 buah input analog, yang diberi tanda dengan A0, A1, A2, A3, A4, A5. Masing-masing pin analog tersebut memiliki resolusi 10 bits (jadi bisa memiliki 1024 nilai). Secara default, pin-pin tersebut diukur dari ground ke 5V, namun bisa juga menggunakan pin AREF dengan menggunakan fungsi analogReference(). Beberapa in lainnya pada board ini adalah :
AREF. Sebagai referensi tegangan untuk input analog.
Reset. Hubungkan ke LOW untuk melakukan reset terhadap mikrokontroller. Sama dengan penggunaan tombol reset yang tersedia.
Komunikasi
Arduino Uno R3 memiliki beberapa fasilitas untuk berkomunikasi dengan komputer, berkomunikasi dengan Arduino lainnya, atau dengan mikrokontroller lain nya. Chip Atmega328 menyediakan komunikasi serial UART TTL (5V) yang tersedia di pin 0 (RX) dan pin 1 (TX). Chip ATmega16U2 yang terdapat pada board berfungsi menterjemahkan bentuk komunikasi ini melalui USB dan akan tampil sebagai Virtual Port di komputer. Firmware 16U2 menggunakan driver USB standar sehingga tidak membutuhkan driver tambahan.
Pada Arduino Software (IDE) terdapat monitor serial yang memudahkan data textual untuk dikirim menuju Arduino atau keluar dari Arduino. Led TX dan RX akan menyala berkedip-kedip ketika ada data yang ditransmisikan melalui chip USB to Serial via kabel USB ke komputer. Untuk menggunakan komunikasi serial dari digital pin, gunakan SoftwareSerial library
Chip ATmega328 juga mendukung komunikasi I2C (TWI) dan SPI. Di dalam Arduino Software (IDE) sudah termasuk Wire Library untuk memudahkan anda menggunakan bus I2C. Untuk menggunakan komunikasi SPI, gunakan SPI library.
Reset Otomatis (software)
Biasanya, ketika anda melakukan pemrograman mikrokontroller, anda harus menekan tombol reset sesaat sebelum melakukan upload program. Pada Arduino Uno, hal ini tidak lagi merepotkan anda. Arduino Uno telah dilengkapi dengan auto reset yang dikendalikan oleh software pada komputer yang terkoneksi. Salah satu jalur flow control (DTR) dari ATmega16U pada Arduino Uno R3 terhubung dengan jalur reset pada ATmega328 melalui sebuah kapasitor 100nF. Ketika jalur tersebut diberi nilai LOW, mikrokontroller akan di reset. Dengan demikian proses upload akan jauh lebih mudah dan anda tidak harus menekan tombol reset pada saat yang tepat seperti biasanya.
2.2. Sensor Ultrasonik
Sensor ultrasonik adalah sebuah sensor yang berfungsi untuk mengubah besaran fisis (bunyi) menjadi besaran listrik dan sebaliknya. Cara kerja sensor ini didasarkan pada prinsip dari pantulan suatu gelombang suara sehingga dapat dipakai untuk menafsirkan eksistensi (jarak) suatu benda dengan frekuensi tertentu. Disebut sebagai sensor ultrasonik karena sensor ini menggunakan gelombang ultrasonik (bunyi ultrasonik).
Gelombang ultrasonik adalah gelombang bunyi yang mempunyai frekuensi sangat tinggi yaitu 20.000 Hz. Bunyi ultrasonik tidak dapat di dengar oleh telinga manusia. Bunyi ultrasonik dapat didengar oleh anjing, kucing, kelelawar, dan lumba-lumba.
Bunyi ultrasonik nisa merambat melalui zat padat, cair dan gas. Reflektivitas bunyi ultrasonik di permukaan zat padat hampir sama dengan reflektivitas bunyi ultrasonik di permukaan zat cair. Akan tetapi, gelombang bunyi ultrasonik akan diserap oleh tekstil dan busa.
2.2.1. Cara Kerja Sensor Ultrasonik
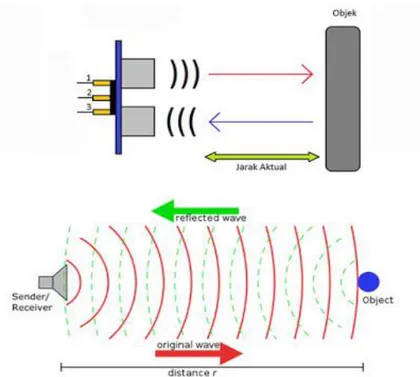
Pada sensor ultrasonik, gelombang ultrasonik dibangkitkan melalui sebuah alat yang disebut dengan piezoelektrik dengan frekuensi tertentu. Piezoelektrik ini akan menghasilkan gelombang ultrasonik (umumnya berfrekuensi 40kHz) ketika sebuah osilator diterapkan pada benda tersebut. Secara umum, alat ini akan menembakkan gelombang ultrasonik menuju suatu area atau suatu target.
Setelah gelombang menyentuh permukaan target, maka target akan memantulkan kembali gelombang tersebut.
Gelombang pantulan dari target akan ditangkap oleh sensor, kemudian sensor menghitung selisih antara waktu pengiriman gelombang dan waktu gelombang pantul diterima.
Gambar 2.1. cara kerja sensor ultrasonik dengan transmitter dan receiver (atas), sensor ultrasonik dengan single sensor yang berfungsi sebagai transmitter dan
receiver sekaligus
Secara detail, cara kerja sensor ultrasonik adalah sebagai berikut:
Sinyal dipancarkan oleh pemancar ultrasonik dengan frekuensi tertentu dan dengan durasi waktu tertentu. Sinyal tersebut berfrekuensi diatas 20kHz. Untuk mengukur jarak benda (sensor jarak), frekuensi yang umum digunakan adalah 40kHz.
Sinyal yang dipancarkan akan merambat sebagai gelombang bunyi dengan kecepatan sekitar 340 m/s. Ketika menumbuk suatu benda, maka sinyal tersebut akan dipantulkan oleh benda tersebut.
Setelah gelombang pantulan sampai di alat penerima, maka sinyal tersebut akan diproses untuk menghitung jarak benda tersebut. Jarak benda dihitung berdasarkan rumus :
S = 340.t/2
dimana S merupakan jarak antara sensor ultrasonik dengan benda (bidang pantul), dan t adalah selisih antara waktu pemancaran gelombang oleh transmitter dan waktu ketika gelombang pantul diterima receiver.
2.2.2. Aplikasi Sensor Ultrasonik
Dalam bidang kesehatan, gelombang ultrasonik bisa digunakan untuk melihat organ-organ dalam tubuh manusia seperti untuk mendeteksi tumor, liver, otak dan menghancurkan batu ginjal. Gelombang ultrasonik juga dimanfaatkan pada alat USG (ultrasonografi) yang biasa digunakan oleh dokter kandungan.
Dalam bidang industri, gelombang ultrasonik digunakan untuk mendeteksi keretakan pada logam, meratakan campuran besi dan timah, meratakan campuran susu agar homogen, mensterilkan makanan yang diawetkan dalam kaleng, dan membersihkan benda benda yang sangat halus. Gelombang ultrasonik juga bisa digunakan untuk mendeteksi keberadaan mineral maupun minyak bumi yang tersimpan di dalam perut bumi.
Dalam bidang pertahanan, gelombang ultrasonik digunakan sebagai radar atau navigasi, di darat maupun di dalam air. Gelombang ultrasonik digunakan oleh kapal pemburu untuk mengetahui keberadaan kapal selam, dipasang pada kapal selam untuk mengetahui keberadaan kapal yang berada di atas permukaan air, mengukur kedalaman palung laut, mendeteksi ranjau, dan menentukan posisi sekelompok ikan.
2.2.3. Rangkaian Sensor Ultrasonik Piezoelektrik
Piezoelektrik berfungsi untuk mengubah energi listrik menjadi energi mekanik. Bahan piezoelektrik adalah material yang memproduksi medan listrik ketika dikenai regangan atau tekanan mekanis. Sebaliknya, jika medan listrik diterapkan, maka material tersebut akan mengalami regangan atau tekanan mekanis. Jika rangkaian pengukur beroperasi pada mode pulsa elemen piezoelektrik yang sama, maka dapat digunakan sebagai transmitter dan reiceiver. Frekuensi yang ditimbulkan tergantung pada osilatornya yang disesuiakan frekuensi kerja dari masing-masing transduser. Karena kelebihannya inilah maka tranduser piezoelektrik lebih sesuai digunakan untuk sensor ultrasonik.
Transmitter
Transmitter adalah sebuah alat yang berfungsi sebagai pemancar gelombang ultrasonik dengan frekuensi tertentu (misal, sebesar 40 kHz) yang dibangkitkan dari sebuah osilator. Untuk menghasilkan frekuensi 40 KHz, harus di buat sebuah rangkaian osilator dan keluaran dari osilator dilanjutkan menuju penguat sinyal. Besarnya frekuensi ditentukan oleh komponen RLC / kristal tergantung dari disain osilator yang digunakan. Penguat sinyal akan memberikan sebuah sinyal listrik yang diumpankan ke piezoelektrik dan terjadi reaksi mekanik sehingga bergetar dan memancarkan gelombang yang sesuai dengan besar frekuensi pada osilator.
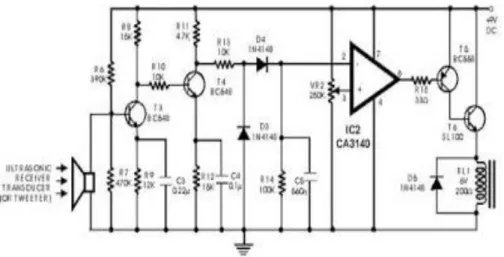
Receiver
Receiver terdiri dari transduser ultrasonik menggunakan bahan piezoelektrik, yang berfungsi sebagai penerima gelombang pantulan yang berasal dari transmitter yang dikenakan pada permukaan suatu benda atau gelombang langsung LOS (Line of Sight) dari transmitter. Oleh karena bahan piezoelektrik memiliki reaksi yang reversible, elemen keramik akan membangkitkan tegangan listrik pada saat gelombang datang dengan frekuensi yang resonan dan akan menggetarkan bahan piezoelektrik tersebut.
Gambar 2.3. rangkaian dasar receiver sensor ultrasonik
2.3 Sensor Ultrasonik HC-SR04
Sensor ini merupakan sensor ultrasonik siap pakai, satu alat yang berfungsi sebagai pengirim, penerima, dan pengontrol gelombang ultrasonik. Alat ini bisa digunakan untuk mengukur jarak benda dari 2cm - 4m dengan akurasi 3mm. Alat ini memiliki 4 pin, pin Vcc, Gnd, Trigger, dan Echo.
Pin Vcc untuk listrik positif dan Gnd untuk ground-nya. Pin Trigger untuk trigger keluarnya sinyal dari sensor dan pin Echo untuk menangkap sinyal pantul dari benda.
Gambar 2.4. sensor ultrasonik HC-SR04
Cara menggunakan alat ini yaitu: ketika kita memberikan tegangan positif pada pin Trigger selama 10uS, maka sensor akan mengirimkan 8 step sinyal ultrasonik dengan frekuensi 40kHz. Selanjutnya, sinyal akan diterima pada pin Echo. Untuk mengukur jarak benda yang memantulkan sinyal tersebut, maka selisih waktu ketika mengirim dan menerima sinyal digunakan untuk menentukan jarak benda tersebut. Rumus untuk menghitungnya sudah saya sampaikan di atas.
Berikut adalah visualisasi dari sinyal yang dikirimkan oleh sensor HC-SR04
2.4. Bread Board
Project Board atau yang sering disebut sebagai BreadBoard adalah dasar konstruksi sebuah sirkuit elektronik dan merupakan prototipe dari suatu rangkaian elektronik. Di zaman modern istilah ini sering digunakan untuk merujuk pada jenis tertentu dari papan tempat merangkai komponen, dimana papan ini tidak memerlukan proses menyolder ( langsung tancap ).
Karena papan ini solderless alias tidak memerlukan solder sehingga dapat digunakan kembali, dan dengan demikian dapat digunakan untuk prototipe sementara serta membantu dalam bereksperimen desain sirkuit elektronika. Berbagai sistem elektronik dapat di prototipekan dengan menggunakan breadboard, mulai dari sirkuit analog dan digital kecil sampai membuat unit pengolahan terpusat (CPU).
Secara umum breadbord memiliki jalur seperti berikut ini :
Gambar 2.6. Jalur Breadboard Penjelasan :
2 Pasang jalur Atas dan bawah terhubung secara horisontal sampai ke bagian tengah dari breadboard. Biasanya jalur ini digunakan sebagai jalur power atau jalur sinyal yg umum digunakan seperti clock atau jalur komunikasi.
5 lobang komponen di tengah merupakan tempat merangkai komponen. Jalur ke 5 lobang ini terhubung vertikal sampai bagian tengah dari breadboard.
Pembatas tengah breadboard biasanya digunakan sebagai tempat menancapkan komponen IC
2.4. Motor Servo
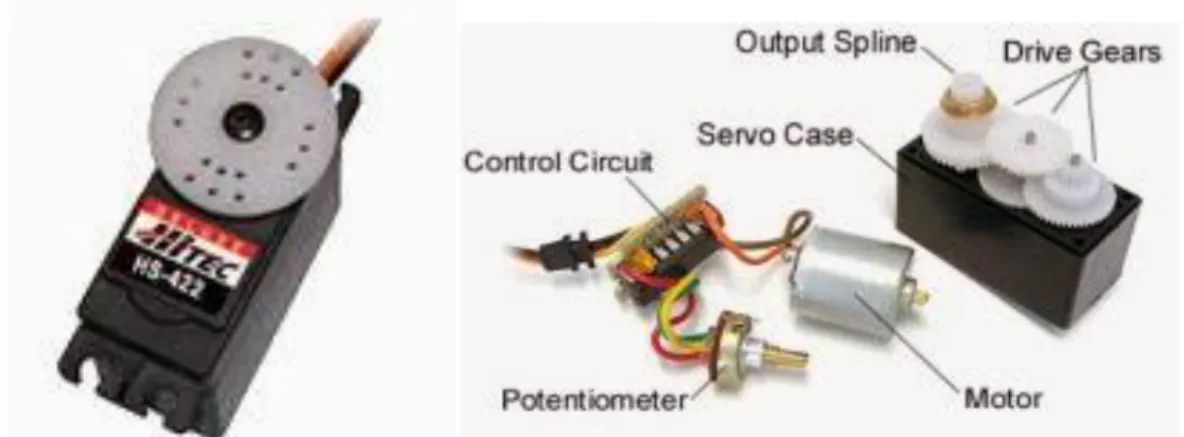
Motor servo adalah sebuah perangkat atau aktuator putar (motor) yang dirancang dengan sistem kontrol umpan balik loop tertutup (servo), sehingga dapat di set-up atau di atur untuk menentukan dan memastikan posisi sudut dari poros output motor. motor servo merupakan perangkat yang terdiri dari motor DC, serangkaian gear, rangkaian kontrol dan potensiometer.
Serangkaian gear yang melekat pada poros motor DC akan memperlambat putaran poros dan meningkatkan torsi motor servo, sedangkan potensiometer dengan perubahan resistansinya saat motor berputar berfungsi sebagai penentu batas posisi putaran poros motor servo.
Penggunaan sistem kontrol loop tertutup pada motor servo berguna untuk mengontrol gerakan dan posisi akhir dari poros motor servo. Penjelasan sederhananya begini, posisi poros output akan di sensor untuk mengetahui posisi poros sudah tepat seperti yang di inginkan atau belum, dan jika belum, maka kontrol input akan mengirim sinyal kendali untuk membuat posisi poros tersebut tepat pada posisi yang diinginkan.
Untuk lebih jelasnya mengenai sistem kontrol loop tertutup, perhatikan contoh sederhana beberapa aplikasi lain dari sistem kontrol loop tertutup, seperti penyetelan suhu pada AC, kulkas, setrika dan lain sebagainya.
Motor servo biasa digunakan dalam aplikasi-aplikasi di industri, selain itu juga digunakan dalam berbagai aplikasi lain seperti pada mobil mainan radio kontrol, robot, pesawat, dan lain sebagainya.
Gambar 2.7. Komponen Motor Servo
Ada dua jenis motor servo, yaitu motor servo AC dan DC. Motor servo AC lebih dapat menangani arus yang tinggi atau beban berat, sehingga sering diaplikasikan pada mesin-mesin industri. Sedangkan motor servo DC biasanya lebih cocok untuk digunakan pada aplikasi-aplikasi yang lebih kecil. Dan bila dibedakan menurut rotasinya, umumnya terdapat dua jenis motor servo yang dan terdapat di pasaran, yaitu motor servo rotation 180⁰ dan servo rotation continuous.
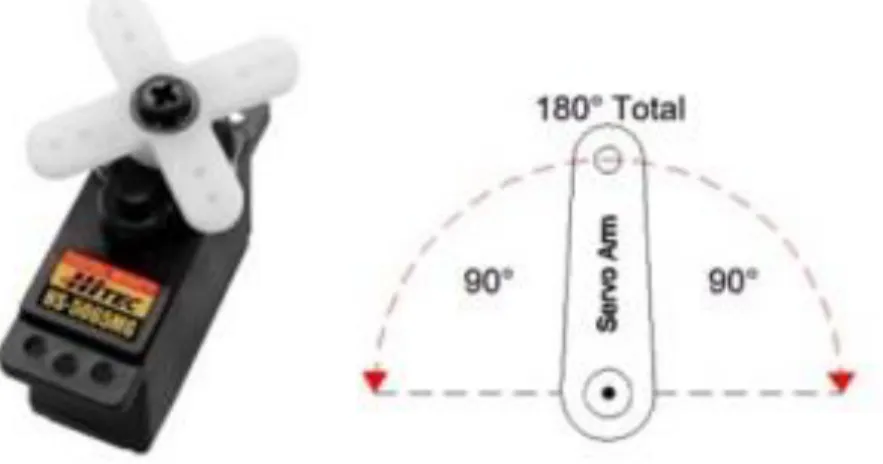
Motor servo standard (servo rotation 180⁰) adalah jenis yang paling umum dari motor servo, dimana putaran poros outputnya terbatas hanya 90⁰ kearah kanan dan 90⁰ kearah kiri. Dengan kata lain total putarannya hanya setengah lingkaran atau 180⁰.
Motor servo rotation continuous merupakan jenis motor servo yang sebenarnya sama dengan jenis servo standard, hanya saja perputaran porosnya tanpa batasan atau dengan kata lain dapat berputar terus, baik ke arah kanan maupun kiri.
Prinsip kerja motor servo
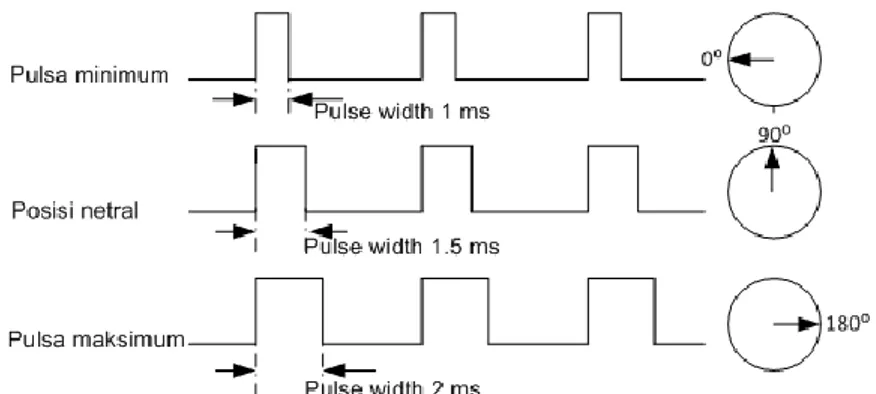
Motor servo dikendalikan dengan memberikan sinyal modulasi lebar pulsa (Pulse Wide Modulation / PWM) melalui kabel kontrol. Lebar pulsa sinyal kontrol yang diberikan akan menentukan posisi sudut putaran dari poros motor servo. Sebagai contoh, lebar pulsa dengan waktu 1,5 ms (mili detik) akan memutar poros motor servo ke posisi sudut 90⁰.
Bila pulsa lebih pendek dari 1,5 ms maka akan berputar ke arah posisi 0⁰ atau ke kiri (berlawanan dengan arah jarum jam), sedangkan bila pulsa yang diberikan lebih lama dari 1,5 ms maka poros motor servo akan berputar ke arah posisi 180⁰ atau ke kanan (searah jarum jam). Lebih jelasnya perhatikan gambar dibawah ini.
Gambar 2.8. Poros motor Servo
Ketika lebar pulsa kendali telah diberikan, maka poros motor servo akan bergerak atau berputar ke posisi yang telah diperintahkan, dan berhenti pada posisi tersebut dan akan tetap bertahan pada posisi tersebut. Jika ada kekuatan eksternal yang mencoba memutar atau mengubah posisi tersebut, maka motor servo akan mencoba menahan atau melawan dengan besarnya kekuatan torsi yang dimilikinya (rating torsi servo).
Namun motor servo tidak akan mempertahankan posisinya untuk selamanya, sinyal lebar pulsa kendali harus diulang setiap 20 ms (mili detik) untuk menginstruksikan agar posisi poros motor servo tetap bertahan pada posisinya.
Gambar 2.9. Motor Servo
Keunggulan Motor Servo
Keunggulan dari penggunaan motor servo adalah :
Tidak bergetar dan tidak ber-resonansi saat beroperasi.
Daya yang dihasilkan sebanding dengan ukuran dan berat motor.
Penggunaan arus listik sebanding dengan beban yang diberikan.
Resolusi dan akurasi dapat diubah dengan hanya mengganti encoder yang dipakai.
Kelemahan Motor Servo
Keunggulan dari penggunaan motor servo adalah :
Tidak bergetar dan tidak ber-resonansi saat beroperasi.
Daya yang dihasilkan sebanding dengan ukuran dan berat motor.
Resolusi dan akurasi dapat diubah dengan hanya mengganti encoder yang dipakai.
Tidak berisik saat beroperasi dengan kecepatan tinggi.
Aplikasi Motor Servo
Motor servo dapat dimanfaatkan pada pembuatan robot, salah satunya sebagai penggerak kaki robot. Motor servo dipilih sebagai penggerak pada kaki robot karena motor servo memiliki tenaga atau torsi yang besar, sehingga dapat menggerakan kaki robot dengan beban yang cukup berat. Pada umumnya motor servo yang digunakan sebagai pengerak pada robot adalah motor servo 180o
.