1
PERANCANGAN KONTROLER LOGIKA FUZZY INDEPENDENT UNTUK
PENGATURAN GERAKAN RUDAL DARAT KE UDARA
Seconingrum K. (2209105026)
Jurusan Teknik Elektro FTI ITS, Surabaya 60111, email: wardanis@yahoo.com
Abstrak – Makalah ini dibahas mengenai
performansi dari kontroler logika Fuzzy Independent yang diimplementasikan dalam sistem pengaturan pada plant rudal darat ke udara. Penelitian ini akan mensimulasikan gerakan rudal dengan pengaturan sudut pitch dan sudut serang (Angle of Attack-AOA) rudal. Sistem yang disimulasikan adalah sistem pengaturan gerakan rudal agar dapat menembak tepat pada target. Kontroler yang digunakan yaitu kontroler logika Fuzzy. Rudal disimulasikan dengan dua masukan yaitu defleksi elevator dan sudut Line of Sight (LOS) dan dua keluaran yaitu sudut pitch dan sudut serang (Angle of Attack) sehingga dibutuhkan 2 buah kontroler logika Fuzzy Independent atau kontroler logika Fuzzy yang berdiri sendiri. Kontroler logika Fuzzy berfungsi untuk menjaga kestabilan sistem. Sistem dengan kontroler logika Fuzzy Independent tersebut dianalisa dan ditunjukkan dengan simulasi dalam bentuk 3 dimensi. Dari hasil respon sistem, diperoleh sistem autopilot rudal dengan kontroler logika Fuzzy handal selama sudut awal yang dibentuk target kurang dari 7 derajat. Kontroler logika Fuzzy Independent mampu mengendalikan rudal agar menembak target pada saat sumbu X dan Z berada pada waktu respon yang sama yaitu 12.7 detik.
Kata kunci : plant rudal, pitch, Angle of
Attack-AOA, elevator, Line of Sight (LOS), kontroler logika Fuzzy Independent
1. PENDAHULUAN
Peluru kendali darat ke udara atau SAM (bahasa Inggris: Surface-to-Air Missiles) adalah peluru kendali yang dirancang untuk ditembakkan dari darat dan menghancurkan target di udara seperti pesawat dan helikopter. Sistem kendali suatu rudal darat ke udara sangat menentukan ketepatan perkenaan terhadap target. Dari hal tersebut maka dibuat sistem kendali rudal dengan kontroler logika Fuzzy untuk memberi kehandalan sistem dan respon yang baik. Di mana karakteristik rudal mempunyai tingkat kestabilan yang rendah sehingga perlu adanya kontroler Fuzzy. Kontroler logika Fuzzy Independent ini mengendalikan rudal dengan 2 buah kontroler Fuzzy untuk pengendalian sudut pitch dan sudut serang rudal (Angle of Attack) agar rudal dapat menembak target dengan tepat sasaran.
Sistem kontroler rudal dengan logika Fuzzy Independent ini menggunakan bantuan software Matlab sehingga hasil simulasi dapat dilihat dengan 3 dimensi.
2. PERSAMAAN GERAK LONGITUDINAL RUDAL DARAT KE UDARA
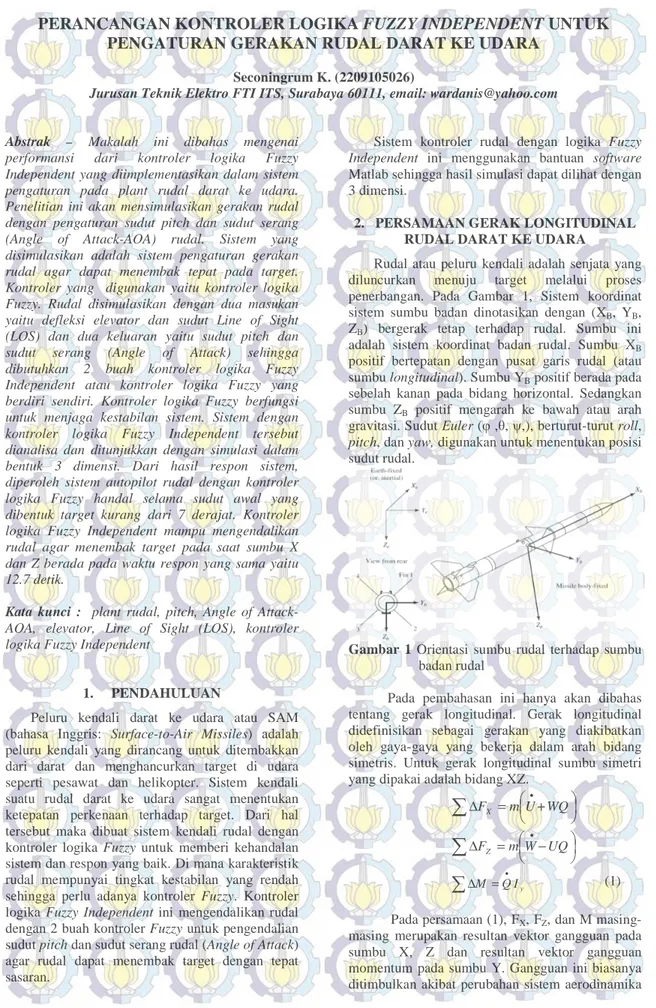
Rudal atau peluru kendali adalah senjata yang diluncurkan menuju target melalui proses penerbangan. Pada Gambar 1, Sistem koordinat sistem sumbu badan dinotasikan dengan (XB, YB, ZB) bergerak tetap terhadap rudal. Sumbu ini adalah sistem koordinat badan rudal. Sumbu XB positif bertepatan dengan pusat garis rudal (atau sumbu longitudinal). Sumbu YB positif berada pada sebelah kanan pada bidang horizontal. Sedangkan sumbu ZB positif mengarah ke bawah atau arah gravitasi. Sudut Euler (φ ,θ, ψ,), berturut-turut roll, pitch, dan yaw, digunakan untuk menentukan posisi sudut rudal.
Gambar 1 Orientasi sumbu rudal terhadap sumbu badan rudal
Pada pembahasan ini hanya akan dibahas tentang gerak longitudinal. Gerak longitudinal didefinisikan sebagai gerakan yang diakibatkan oleh gaya-gaya yang bekerja dalam arah bidang simetris. Untuk gerak longitudinal sumbu simetri yang dipakai adalah bidang XZ.
+ = ∆ •
∑
FX m U WQ − = ∆ •∑
FZ mW UQ y I Q M • = ∆∑
(1) Pada persamaan (1), FX, FZ, dan M masing-masing merupakan resultan vektor gangguan pada sumbu X, Z dan resultan vektor gangguan momentum pada sumbu Y. Gangguan ini biasanya ditimbulkan akibat perubahan sistem aerodinamika2
rudal yang meliputi seluruh variabel pada sumbu X, Y, Z yaitu U , W , W ,• Θ,dan Θ•. Dapat diekspresikan dalam deret Taylor. kemudian dibagi dengan Sq. Di mana S adalah area , q adalah tekanan udara dan dikalikan dengan 2U/ d dan d/2U, di mana d adalah diameter dan U adalah kecepatan awal rudal. Pada saat kecepatan konstan, maka akan terjadi osilasi periode singkat, di mana0
'u= . Persamaan X dapat di abaikan, karena tidak mempengaruhi osilasi periode singkat. Pada persamaan yang dipakai untuk rudal darat ke udara
Mq
C
dan •α ' M
C
diabaikan karena rudal sudah memiliki pitch damping dari sayap utama dan tidak mempunyai efek downwash. Persamaan rudal untuk rudal darat ke udara pada persamaan (2).( )
s C( ) ( )
s C( )
s Sq mU s C s Sq mU F W Zα α θ = δδ Θ − − + − ' sin(
) ( )
s( )
s C( )
s Sqd I s C M y Mα α θ = δδ + − 2 ' (2)Tabel 1 Definisi dan persamaan derivatif persamaan longitudinal
Simbol Definisi Keterangan
W
C
Sq mg − Gravitasi α ZC
α ∂ ∂FZ Sq 1 Slope saat gaya normal curve α MC
α
∂ ∂M Sqd 1 Kestabilan statis longitudinal 3. SISTEM RUDAL BIMBINGANPada sistem rudal bimbingan beberapa faktor pendukung, yaitu seeker, guidance, dan autopilot. Cara kerja rudal dimulai saat rudal meluncur dengan besar sudut tertentu. Setelah rudal diluncurkan, seeker akan mencari target dengan bantuan radar, infrared, atau optik. Diagram blok sistem rudal dapat dilihat pada Gambar 2.
Gambar 2 Diagram blok pada rudal bimbingan Diagram blok subsistem autopilot dapat dilihat pada Gambar 3.
Gambar 3 Diagram blok autopilot rudal
Pada guidance, rudal akan dibimbing dengan jalur pencarian tertentu agar rudal terus mengejar target. Sedangkan autopilot, rudal dapat mengendalikan gerak rudal dengan sistem kontrol agar dapat menembak mengenai target dengan tepat.
Pada seeker Gambar 4, pitching rudal menyebabkan seeker mencari Line of Sight (LOS) atau
θ
Ratau λ yaitu sudut antara pusat antena seeker menuju target. Pada gimbal, posisi sudut pada garis pusat antena, masing-masing sumbu mempunyai mekanisme servo untuk menyesuaikan orientasi sudut dalam menanggapi sinyal kesalahan pelacakan yang terukur. Di mana ε adalah kesalahan boresight, yaitu kesalahan antara garis pusat dan antena terhadap target.Gambar 4 Seeker pada rudal menunjukkan sudut geometri
Pada sistem kontrol permukaan, ekor rudal dikendalikan oleh empat sirip tanpa gangguan downwash dari kontrol permukaan yang didefinisikan dengan istilah elevator, rudder, dan aileron. Jika rudal memiliki empat kontrol permukaan seperti yang ditunjukkan pada Gambar 5 maka didefinisikan kontrol permukaan 2 dan 4 sebagai elevator, dan 1 dan 3 sebagai rudder. Untuk manuver dinamakan sebagai roll.
Gambar 5 Komando kontrol permukaan dan aktuator
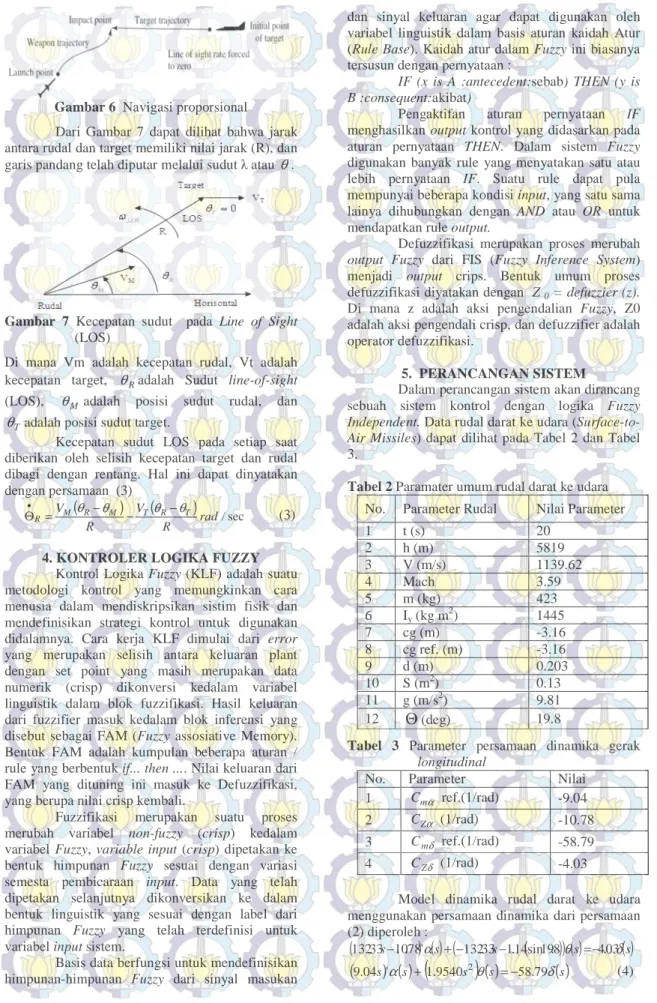
Pada umumnya yang paling banyak dikenal dan digunakan hukum guidance untuk jarak pendek sampai jarak menengah pada homing rudal adalah proporsional navigation (PN) karena sederhana dan mudah dalam implementasi. Pada Gambar 6 menunjukkan bentuk lintasan rudal dengan sistem navigasi proporsional.
3
Gambar 6 Navigasi proporsionalDari Gambar 7 dapat dilihat bahwa jarak antara rudal dan target memiliki nilai jarak (R), dan garis pandang telah diputar melalui sudut λ atau θ.
Gambar 7 Kecepatan sudut pada Line of Sight (LOS)
Di mana Vm adalah kecepatan rudal, Vt adalah kecepatan target, θRadalah Sudut line-of-sight (LOS), θMadalah posisi sudut rudal, dan
T
θ adalah posisi sudut target.
Kecepatan sudut LOS pada setiap saat diberikan oleh selisih kecepatan target dan rudal dibagi dengan rentang. Hal ini dapat dinyatakan dengan persamaan (3)
(
)
(
)
rad/sec R V R VM R M T R T R= θ −θ − θ −θ Θ• (3)4. KONTROLER LOGIKA FUZZY Kontrol Logika Fuzzy (KLF) adalah suatu metodologi kontrol yang memungkinkan cara menusia dalam mendiskripsikan sistim fisik dan mendefinisikan strategi kontrol untuk digunakan didalamnya. Cara kerja KLF dimulai dari error yang merupakan selisih antara keluaran plant dengan set point yang masih merupakan data numerik (crisp) dikonversi kedalam variabel linguistik dalam blok fuzzifikasi. Hasil keluaran dari fuzzifier masuk kedalam blok inferensi yang disebut sebagai FAM (Fuzzy assosiative Memory). Bentuk FAM adalah kumpulan beberapa aturan / rule yang berbentuk if... then .... Nilai keluaran dari FAM yang dituning ini masuk ke Defuzzifikasi, yang berupa nilai crisp kembali.
Fuzzifikasi merupakan suatu proses merubah variabel non-fuzzy (crisp) kedalam variabel Fuzzy, variable input (crisp) dipetakan ke bentuk himpunan Fuzzy sesuai dengan variasi semesta pembicaraan input. Data yang telah dipetakan selanjutnya dikonversikan ke dalam bentuk linguistik yang sesuai dengan label dari himpunan Fuzzy yang telah terdefinisi untuk variabel input sistem.
Basis data berfungsi untuk mendefinisikan himpunan-himpunan Fuzzy dari sinyal masukan
dan sinyal keluaran agar dapat digunakan oleh variabel linguistik dalam basis aturan kaidah Atur (Rule Base). Kaidah atur dalam Fuzzy ini biasanya tersusun dengan pernyataan :
IF (x is A :antecedent:sebab) THEN (y is B :consequent:akibat)
Pengaktifan aturan pernyataan IF menghasilkan output kontrol yang didasarkan pada aturan pernyataan THEN. Dalam sistem Fuzzy digunakan banyak rule yang menyatakan satu atau lebih pernyataan IF. Suatu rule dapat pula mempunyai beberapa kondisi input, yang satu sama lainya dihubungkan dengan AND atau OR untuk mendapatkan rule output.
Defuzzifikasi merupakan proses merubah output Fuzzy dari FIS (Fuzzy Inference System) menjadi output crips. Bentuk umum proses defuzzifikasi diyatakan dengan Z 0 = defuzzier (z). Di mana z adalah aksi pengendalian Fuzzy, Z0 adalah aksi pengendali crisp, dan defuzzifier adalah operator defuzzifikasi.
5. PERANCANGAN SISTEM
Dalam perancangan sistem akan dirancang sebuah sistem kontrol dengan logika Fuzzy Independent. Data rudal darat ke udara (Surface-to-Air Missiles) dapat dilihat pada Tabel 2 dan Tabel 3.
Tabel 2 Paramater umum rudal darat ke udara No. Parameter Rudal Nilai Parameter
1 t (s) 20 2 h (m) 5819 3 V (m/s) 1139.62 4 Mach 3.59 5 m (kg) 423 6 Iy (kg m2) 1445 7 cg (m) -3.16 8 cg ref. (m) -3.16 9 d (m) 0.203 10 S (m2) 0.13 11 g (m/s2) 9.81 12
Θ
(deg) 19.8Tabel 3 Parameter persamaan dinamika gerak longitudinal
No. Parameter Nilai
1 Cmα ref.(1/rad) -9.04
2 CZα (1/rad) -10.78
3 Cmδ ref.(1/rad) -58.79
4 CZδ (1/rad) -4.03
Model dinamika rudal darat ke udara menggunakan persamaan dinamika dari persamaan (2) diperoleh :
(
132.33s−10.78) ( )
'αs +(
−132.33s−1.14(
sin19.8)
) ( )
θs=−4.03δ( )
s(
9.04s) ( )
'αs +(
1.9540s2)
θ( )
s =−58.79δ( )
s (4)4
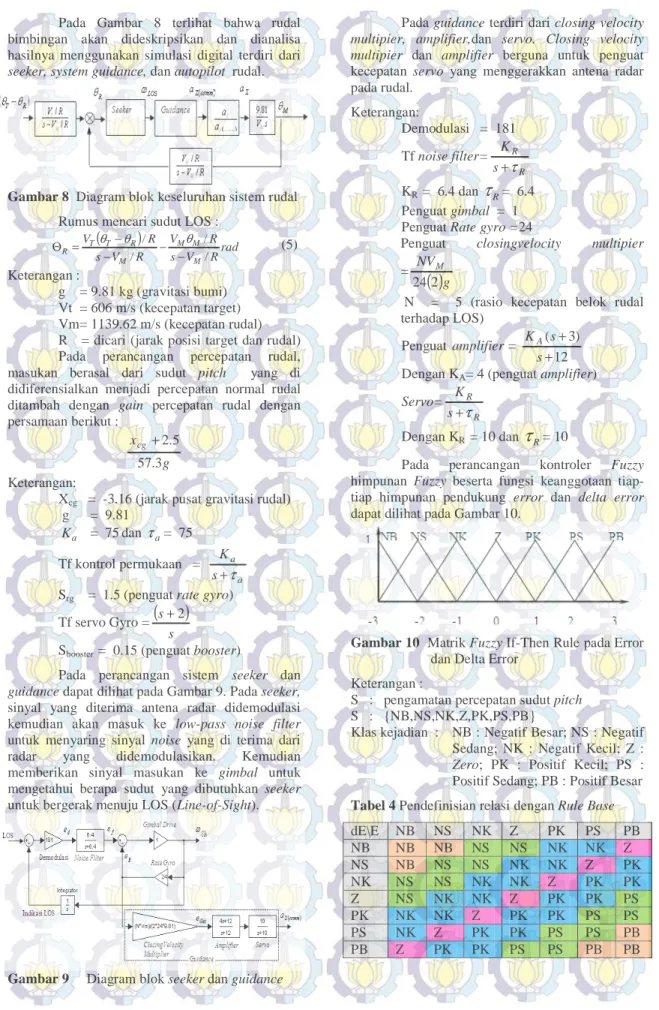
Pada Gambar 8 terlihat bahwa rudal bimbingan akan dideskripsikan dan dianalisa hasilnya menggunakan simulasi digital terdiri dari seeker, system guidance, dan autopilot rudal.Gambar 8 Diagram blok keseluruhan sistem rudal Rumus mencari sudut LOS :
(
)
rad R V s R V R V s R V M M M M R T T R / / / / − − − − = Θ θ θ θ (5) Keterangan : g = 9.81 kg (gravitasi bumi) Vt = 606 m/s (kecepatan target) Vm= 1139.62 m/s (kecepatan rudal) R = dicari (jarak posisi target dan rudal) Pada perancangan percepatan rudal, masukan berasal dari sudut pitch yang di didiferensialkan menjadi percepatan normal rudal ditambah dengan gain percepatan rudal dengan persamaan berikut : g xcg 3 . 57 5 . 2 + Keterangan:Xcg = -3.16 (jarak pusat gravitasi rudal) g = 9.81 a K = 75 dan τa= 75 Tf kontrol permukaan = a a s K τ +
Srg = 1.5 (penguat rate gyro) Tf servo Gyro =
(
)
s s+2
Sbooster = 0.15 (penguat booster)
Pada perancangan sistem seeker dan guidance dapat dilihat pada Gambar 9. Pada seeker, sinyal yang diterima antena radar didemodulasi kemudian akan masuk ke low-pass noise filter untuk menyaring sinyal noise yang di terima dari radar yang didemodulasikan. Kemudian memberikan sinyal masukan ke gimbal untuk mengetahui berapa sudut yang dibutuhkan seeker untuk bergerak menuju LOS (Line-of-Sight).
Gambar 9 Diagram blok seeker dan guidance
Pada guidance terdiri dari closing velocity multipier, amplifier,dan servo. Closing velocity multipier dan amplifier berguna untuk penguat kecepatan servo yang menggerakkan antena radar pada rudal. Keterangan: Demodulasi = 181 Tf noise filter= R R s K τ + KR = 6.4 dan
τ
R= 6.4 Penguat gimbal = 1 Penguat Rate gyro =24Penguat closingvelocity multipier =
( )
g NVM
2 24
N = 5 (rasio kecepatan belok rudal terhadap LOS) Penguat amplifier = 12 ) 3 ( + + s s KA
Dengan KA= 4 (penguat amplifier) Servo= R R s K τ + Dengan KR = 10 dan
τ
R= 10Pada perancangan kontroler Fuzzy himpunan Fuzzy beserta fungsi keanggotaan tiap-tiap himpunan pendukung error dan delta error dapat dilihat pada Gambar 10.
Gambar 10 Matrik Fuzzy If-Then Rule pada Error dan Delta Error
Keterangan :
S : pengamatan percepatan sudut pitch S : {NB,NS,NK,Z,PK,PS,PB}
Klas kejadian : NB : Negatif Besar; NS : Negatif Sedang; NK : Negatif Kecil; Z : Zero; PK : Positif Kecil; PS : Positif Sedang; PB : Positif Besar Tabel 4 Pendefinisian relasi dengan Rule Base
dE\E NB NS NK Z PK PS PB NB NB NB NS NS NK NK Z NS NB NS NS NK NK Z PK NK NS NS NK NK Z PK PK Z NS NK NK Z PK PK PS PK NK NK Z PK PK PS PS PS NK Z PK PK PS PS PB PB Z PK PK PS PS PB PB
5
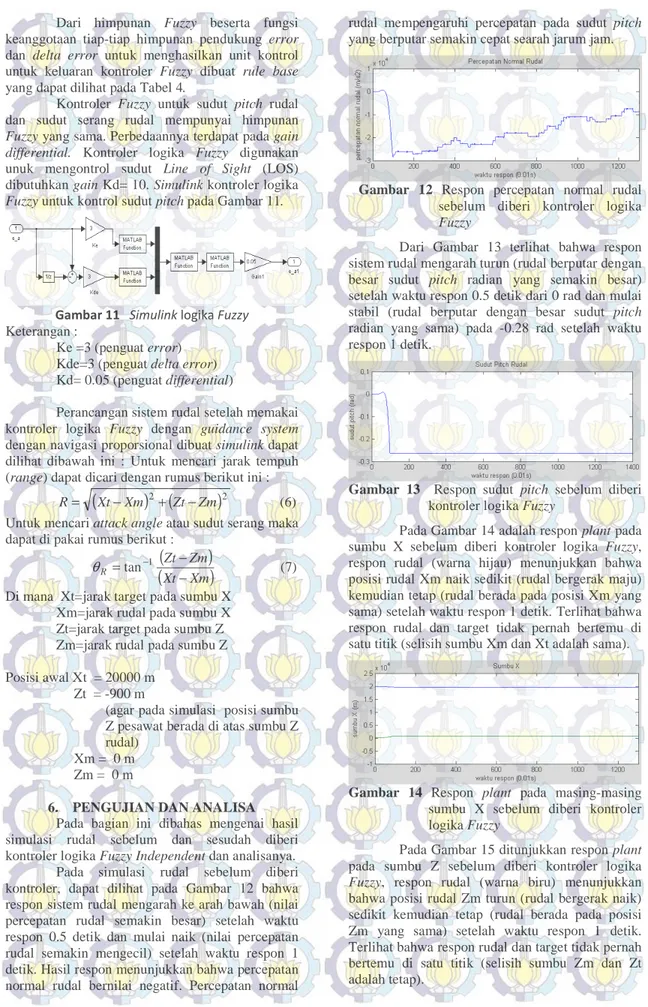
Dari himpunan Fuzzy beserta fungsi keanggotaan tiap-tiap himpunan pendukung error dan delta error untuk menghasilkan unit kontrol untuk keluaran kontroler Fuzzy dibuat rule base yang dapat dilihat pada Tabel 4.Kontroler Fuzzy untuk sudut pitch rudal dan sudut serang rudal mempunyai himpunan Fuzzy yang sama. Perbedaannya terdapat pada gain differential. Kontroler logika Fuzzy digunakan unuk mengontrol sudut Line of Sight (LOS) dibutuhkan gain Kd= 10. Simulink kontroler logika Fuzzy untuk kontrol sudut pitch pada Gambar 11.
Gambar 11 Simulink logika Fuzzy Keterangan :
Ke =3 (penguat error) Kde=3 (penguat delta error) Kd= 0.05 (penguat differential)
Perancangan sistem rudal setelah memakai kontroler logika Fuzzy dengan guidance system dengan navigasi proporsional dibuat simulink dapat dilihat dibawah ini : Untuk mencari jarak tempuh (range) dapat dicari dengan rumus berikut ini :
(
) (
2)
2 Zm Zt Xm Xt R= − + − (6)Untuk mencari attack angle atau sudut serang maka dapat di pakai rumus berikut :
(
(
)
)
Xm Xt Zm Zt R − − = −1 tan θ (7)Di mana Xt=jarak target pada sumbu X Xm=jarak rudal pada sumbu X Zt=jarak target pada sumbu Z Zm=jarak rudal pada sumbu Z Posisi awal Xt = 20000 m
Zt = -900 m
(agar pada simulasi posisi sumbu Z pesawat berada di atas sumbu Z rudal)
Xm = 0 m Zm = 0 m
6. PENGUJIAN DAN ANALISA Pada bagian ini dibahas mengenai hasil simulasi rudal sebelum dan sesudah diberi kontroler logika Fuzzy Independent dan analisanya.
Pada simulasi rudal sebelum diberi kontroler, dapat dilihat pada Gambar 12 bahwa respon sistem rudal mengarah ke arah bawah (nilai percepatan rudal semakin besar) setelah waktu respon 0.5 detik dan mulai naik (nilai percepatan rudal semakin mengecil) setelah waktu respon 1 detik. Hasil respon menunjukkan bahwa percepatan normal rudal bernilai negatif. Percepatan normal
rudal mempengaruhi percepatan pada sudut pitch yang berputar semakin cepat searah jarum jam.
Gambar 12 Respon percepatan normal rudal sebelum diberi kontroler logika Fuzzy
Dari Gambar 13 terlihat bahwa respon sistem rudal mengarah turun (rudal berputar dengan besar sudut pitch radian yang semakin besar) setelah waktu respon 0.5 detik dari 0 rad dan mulai stabil (rudal berputar dengan besar sudut pitch radian yang sama) pada -0.28 rad setelah waktu respon 1 detik.
Gambar 13 Respon sudut pitch sebelum diberi kontroler logika Fuzzy
Pada Gambar 14 adalah respon plant pada sumbu X sebelum diberi kontroler logika Fuzzy, respon rudal (warna hijau) menunjukkan bahwa posisi rudal Xm naik sedikit (rudal bergerak maju) kemudian tetap (rudal berada pada posisi Xm yang sama) setelah waktu respon 1 detik. Terlihat bahwa respon rudal dan target tidak pernah bertemu di satu titik (selisih sumbu Xm dan Xt adalah sama).
Gambar 14 Respon plant pada masing-masing sumbu X sebelum diberi kontroler logika Fuzzy
Pada Gambar 15 ditunjukkan respon plant pada sumbu Z sebelum diberi kontroler logika Fuzzy, respon rudal (warna biru) menunjukkan bahwa posisi rudal Zm turun (rudal bergerak naik) sedikit kemudian tetap (rudal berada pada posisi Zm yang sama) setelah waktu respon 1 detik. Terlihat bahwa respon rudal dan target tidak pernah bertemu di satu titik (selisih sumbu Zm dan Zt adalah tetap).
6
Gambar 15 Respon plant pada masing-masingsumbu Z sebelum diberi kontroler logika Fuzzy
Dari Gambar 16 simulasi Matlab menunjukkan bahwa rudal tidak berubah posisi dan berputar pada bidang XZ tidak menentu.
Gambar 16 Simulasi plant sebelum diberi kontroler logika Fuzzy
Pada simulasi rudal setelah diberi kontroler, pada Gambar 17 bahwa respon percepatan normal sistem rudal bermula dari titik nol kemudian mencapai angka -180 melebihi -90 derajat kemudian kembali lagi pada range antara -50 sampai -50. Hal ini menunjukkan respon selalu kembali pada titik steady state walau berosilasi.
Gambar 17 Respon percepatan normal rudal setelah diberi kontroler logika Fuzzy
Dari respon Gambar 18 sudut pitch menunjukkan bahwa sudut pitch semakin besar (saat respon turun dan bernilai negatif) dan mencapai kestabilan (sudut pitch rudal adalah sama) saat waktu respon 6 detik dan besar sudut pitch -0.045 rad.
Gambar 18 Respon sudut pitch setelah diberi kontroler logika Fuzzy
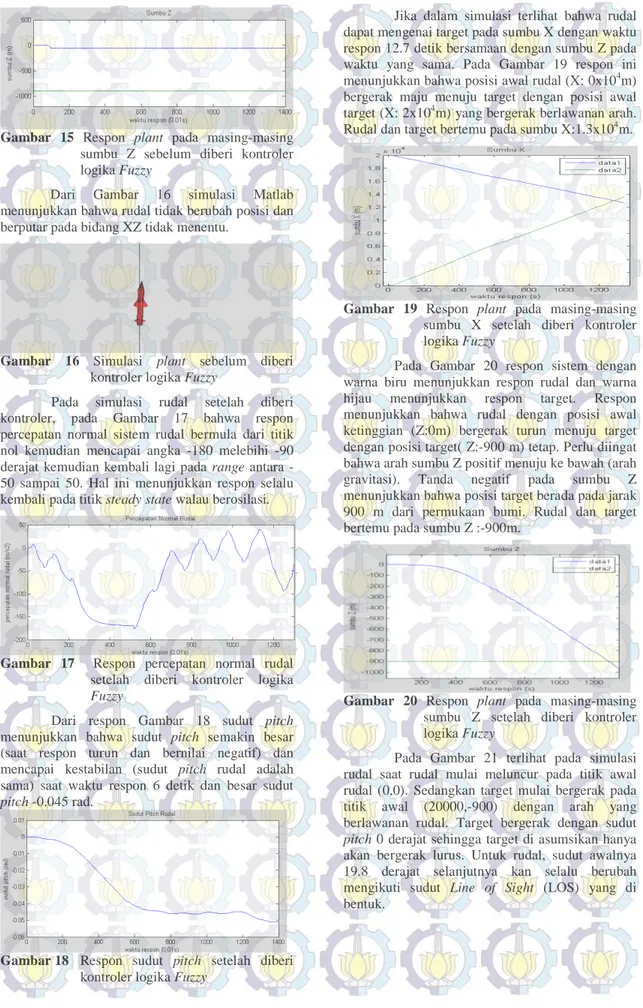
Jika dalam simulasi terlihat bahwa rudal dapat mengenai target pada sumbu X dengan waktu respon 12.7 detik bersamaan dengan sumbu Z pada waktu yang sama. Pada Gambar 19 respon ini menunjukkan bahwa posisi awal rudal (X: 0x104m) bergerak maju menuju target dengan posisi awal target (X: 2x104m) yang bergerak berlawanan arah. Rudal dan target bertemu pada sumbu X:1.3x104m.
Gambar 19 Respon plant pada masing-masing sumbu X setelah diberi kontroler logika Fuzzy
Pada Gambar 20 respon sistem dengan warna biru menunjukkan respon rudal dan warna hijau menunjukkan respon target. Respon menunjukkan bahwa rudal dengan posisi awal ketinggian (Z:0m) bergerak turun menuju target dengan posisi target( Z:-900 m) tetap. Perlu diingat bahwa arah sumbu Z positif menuju ke bawah (arah gravitasi). Tanda negatif pada sumbu Z menunjukkan bahwa posisi target berada pada jarak 900 m dari permukaan bumi. Rudal dan target bertemu pada sumbu Z :-900m.
Gambar 20 Respon plant pada masing-masing sumbu Z setelah diberi kontroler logika Fuzzy
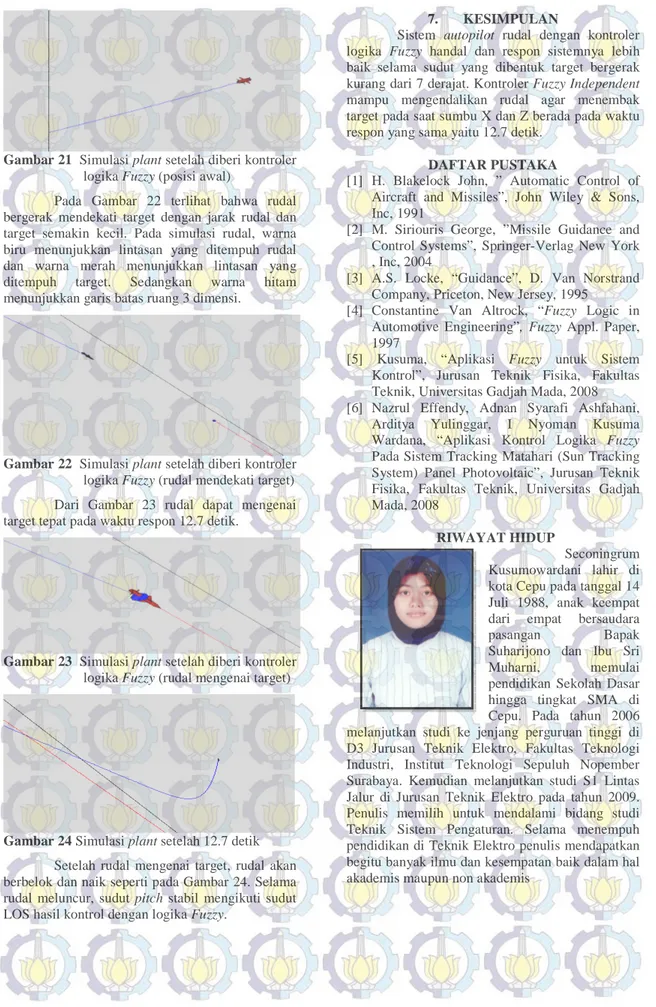
Pada Gambar 21 terlihat pada simulasi rudal saat rudal mulai meluncur pada titik awal rudal (0,0). Sedangkan target mulai bergerak pada titik awal (20000,-900) dengan arah yang berlawanan rudal. Target bergerak dengan sudut pitch 0 derajat sehingga target di asumsikan hanya akan bergerak lurus. Untuk rudal, sudut awalnya 19.8 derajat selanjutnya kan selalu berubah mengikuti sudut Line of Sight (LOS) yang di bentuk.
7
Gambar 21 Simulasi plant setelah diberi kontrolerlogika Fuzzy (posisi awal)
Pada Gambar 22 terlihat bahwa rudal bergerak mendekati target dengan jarak rudal dan target semakin kecil. Pada simulasi rudal, warna biru menunjukkan lintasan yang ditempuh rudal dan warna merah menunjukkan lintasan yang ditempuh target. Sedangkan warna hitam menunjukkan garis batas ruang 3 dimensi.
Gambar 22 Simulasi plant setelah diberi kontroler logika Fuzzy (rudal mendekati target) Dari Gambar 23 rudal dapat mengenai target tepat pada waktu respon 12.7 detik.
Gambar 23 Simulasi plant setelah diberi kontroler logika Fuzzy (rudal mengenai target)
Gambar 24 Simulasi plant setelah 12.7 detik Setelah rudal mengenai target, rudal akan berbelok dan naik seperti pada Gambar 24. Selama rudal meluncur, sudut pitch stabil mengikuti sudut LOS hasil kontrol dengan logika Fuzzy.
7. KESIMPULAN
Sistem autopilot rudal dengan kontroler logika Fuzzy handal dan respon sistemnya lebih baik selama sudut yang dibentuk target bergerak kurang dari 7 derajat. Kontroler Fuzzy Independent mampu mengendalikan rudal agar menembak target pada saat sumbu X dan Z berada pada waktu respon yang sama yaitu 12.7 detik.
DAFTAR PUSTAKA
[1] H. Blakelock John, ” Automatic Control of Aircraft and Missiles”, John Wiley & Sons, Inc, 1991
[2] M. Siriouris George, ”Missile Guidance and Control Systems”, Springer-Verlag New York , Inc, 2004
[3] A.S. Locke, “Guidance”, D. Van Norstrand Company, Priceton, New Jersey, 1995
[4] Constantine Van Altrock, “Fuzzy Logic in Automotive Engineering”, Fuzzy Appl. Paper, 1997
[5] Kusuma, “Aplikasi Fuzzy untuk Sistem Kontrol”, Jurusan Teknik Fisika, Fakultas Teknik, Universitas Gadjah Mada, 2008 [6] Nazrul Effendy, Adnan Syarafi Ashfahani,
Arditya Yulinggar, I Nyoman Kusuma Wardana, “Aplikasi Kontrol Logika Fuzzy Pada Sistem Tracking Matahari (Sun Tracking System) Panel Photovoltaic”, Jurusan Teknik Fisika, Fakultas Teknik, Universitas Gadjah Mada, 2008
RIWAYAT HIDUP
Seconingrum Kusumowardani lahir di kota Cepu pada tanggal 14 Juli 1988, anak keempat dari empat bersaudara
pasangan Bapak
Suharijono dan Ibu Sri
Muharni, memulai
pendidikan Sekolah Dasar hingga tingkat SMA di Cepu. Pada tahun 2006 melanjutkan studi ke jenjang perguruan tinggi di D3 Jurusan Teknik Elektro, Fakultas Teknologi Industri, Institut Teknologi Sepuluh Nopember Surabaya. Kemudian melanjutkan studi S1 Lintas Jalur di Jurusan Teknik Elektro pada tahun 2009. Penulis memilih untuk mendalami bidang studi Teknik Sistem Pengaturan. Selama menempuh pendidikan di Teknik Elektro penulis mendapatkan begitu banyak ilmu dan kesempatan baik dalam hal akademis maupun non akademis