1
SISTEM PENGONTROLAN TEKANAN UDARA
PADA RUANG TERTUTUP
Ayuta Anindyaningrum#1, Sumardi,ST,MT#2, Budi Setiyono,ST,MT#3 #
Jurusan Teknik Elektro, Fakultas Teknik Universitas Diponegoro jl. Prof Sudharto, Tembalang, Semarang, Indonesia
#1 @[email protected] #2 [email protected] #3 [email protected]
Abstrak — Perkembangan teknologi dan industry telah mendorong berdirinya perusahaan dalam skala besar, seperti perusahaan tambang, kimia, dan otomotif. Salah satu faktor penting yang ada pada industry yaitu pengendalian tekanan yang berada di dalam sebuah ruang tertutup yang dipanaskan. Pengukuran tekanan ini dapat bermanfaat untuk mengetahui ketinggian level fluida, refrensi untuk mengatur suhu ruangan pemanas, maupun untuk mengatur pasokan fluida sebagai proses pencampuran kimia.
Pengendalian tekanan ini sangat perlu diperhatikan dengan baik karena proses yang terjadi didalamnya sangat rawan terjadinya ledakan sehingga perlu keamanan lebih. Terlebih lagi apabila terjadi pasokan bahan bakar yang berlebihan sehingga terjadi pemanasan hingga menghasilkan tekanan udara yang berlebihan.
Pada tugas akhir ini, dibuat suatu system pengontrolan untuk mengatur besar tekanan yang nilainya agar sesuai dengan yang diinginkan, untuk mendapatkan pengontrolan yang akurat maka digunakan metode Proporsional. Perancangan alat ini didapatkan nilai perameter Kp=40. Saat pengujian set point naik diperlukan waktu 331 detik untuk mencapi kestabilan setelah perubahan set point dari 10 kPa ke 15 kPa dan saat pengujian set point turun diperlukan waktu 389 untuk mencapai kestabilan setelah perubahan set point dari 18 kPa ke 14 kPa. Perancangan alat ini menggunakan mikroprosesor ATmega8535, sensor tekanan MPX5050GP dan motor servo untuk mengendalikan buka tutupnya valve pembuang tekanan.
Kata kunci — system control tekanan, sensor tekanan MPX5050GP, ATmega8535, metode Proporsional, valve pembuang tekanan.
I. PENDAHULUAN
Pada jaman sekarang ini perkembangan teknologi telah berkembang sedemkian pesatnya keberbagai bidang. Terutama dalam bidang industri yang menuntut adanya ketelitian, keamanan, dan keefektifan dalam proses produksi. Untuk mendukung itu semua, maka diperlukan adanya otomatisasi yang dapat mengurangi tingkat kesalahan yang disebabkan oleh kesalahan manusia.
Pengukuran tekanan udara memegang peranan yang sangat penting dalam bidang industri. Pada saat ini banyak industri yang memanfaatkan konsep tekanan dalam proses industri. Oleh karena itu, pengukuran diperlukan dalam pemantauan dan pengendalian suatu proses.
Salah satu contoh pengaplikasian pengontrolan tekanan udara dalam bidang industri diterapkan pada boiler. Boiler merupakan tempat dimana sebuah bejana tertutup yang digunakan untuk menghasilkan steam (uap) dalam berbagai
keperluan. Air adalah media yang berguna dan murah untuk mengalirkan panas ke suatu proses. Jika air dididihkan sampai menjadi steam, volumnya akan meningkat sekitar 1.600 kali, menghasilkan tenaga yang menyerupai bubuk mesiu yang mudah meledak, sehingga boiler merupakan peralatan yang harus dikelola dan dijaga dengan sangat baik. Pengendalian tekanan dalam ruang tertutup sangat berhubungan langsung dengan safety. Maka dari itu sistem pengontrolan tekanan dibuat selain dapat mendukung proses produksi juga untuk keamanan apabila terjadi error kelebihan suplay bahan bakar yang mengakibatkan pemanasan yang berlebihan sehingga diperlukan pembuangan tekanan melalui katup valve.
Untuk mendapatkan hasil yang memuaskan dalam sistem pengontrolan tersebut diperlukan adanya metode pengontrolan. Pada tugas akhir ini metode kontrol yang digunakan yaitu Proporsional (P). Untuk pengolahan data masukan dari sensor dan proses perhitungan dengan metode kontrol Proporsional maka diperlukan mikrokontroler Atmega8535, sebagai tampilannya dengan menggunakan LCD, dan sebagai aktuatornya menggunakan motor servo untuk mengatur bukaan valve.
II. DASARTEORI A. Pengenalan Ketel Uap
Ketel uap atau boiler merupakan suatu peralatan yang digunakan untuk menghasilkan steam (uap) dalam berbagai keperluan. Air di dalam boiler dipanaskan oleh panas dari hasil pembakaran bahan bakar (sumber panas lainnya) sehingga terjadi perpindahan panas dari sumber panas tersebut ke air yang mengakibatkan air tersebut menjadi panas atau berubah wujud menjadi uap. Air yang lebih panas memiliki berat jenis yang lebih rendah dibanding dengan air yang lebih dingin, sehingga terjadi perubahan berat jenis air di dalam boiler. Air yang memiliki berat jenis yang lebih kecil akan naik, dan sebaliknya air yang memiliki berat jenis yang lebih tinggi akan turun ke dasar[2].
Uap panas atau steam pada tekanan tertentu kemudian digunakan untuk mengalirkan panas ke suatu proses. Jika air dididihkan sampai menjadi steam, volumenya akan meningkat[13].
2
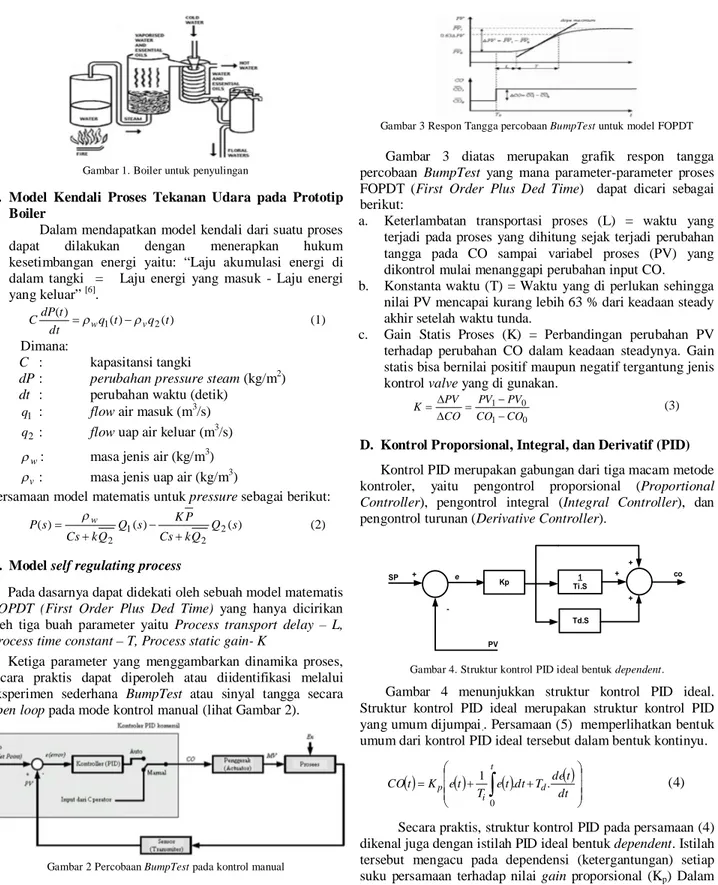
Gambar 1. Boiler untuk penyulingan
B. Model Kendali Proses Tekanan Udara pada Prototip Boiler
Dalam mendapatkan model kendali dari suatu proses dapat dilakukan dengan menerapkan hukum kesetimbangan energi yaitu: “Laju akumulasi energi di dalam tangki = Laju energi yang masuk - Laju energi yang keluar” [6]. ) ( ) ( ) ( 2 1t q t q dt t dP C w v (1) Dimana: C : kapasitansi tangki
dP : perubahan pressure steam (kg/m2) dt : perubahan waktu (detik)
1
q : flow air masuk (m3/s)
2
q : flow uap air keluar (m3/s)
w
: masa jenis air (kg/m3)
v
: masa jenis uap air (kg/m3)
Persamaan model matematis untuk pressure sebagai berikut:
) ( ) ( ) ( 2 2 1 2 s Q Q k Cs P K s Q Q k Cs s P w
(2)
C. Model self regulating process
Pada dasarnya dapat didekati oleh sebuah model matematis FOPDT (First Order Plus Ded Time) yang hanya dicirikan oleh tiga buah parameter yaitu Process transport delay – L, Process time constant – T, Process static gain- K
Ketiga parameter yang menggambarkan dinamika proses, secara praktis dapat diperoleh atau diidentifikasi melalui eksperimen sederhana BumpTest atau sinyal tangga secara open loop pada mode kontrol manual (lihat Gambar 2).
Gambar 2 Percobaan BumpTest pada kontrol manual
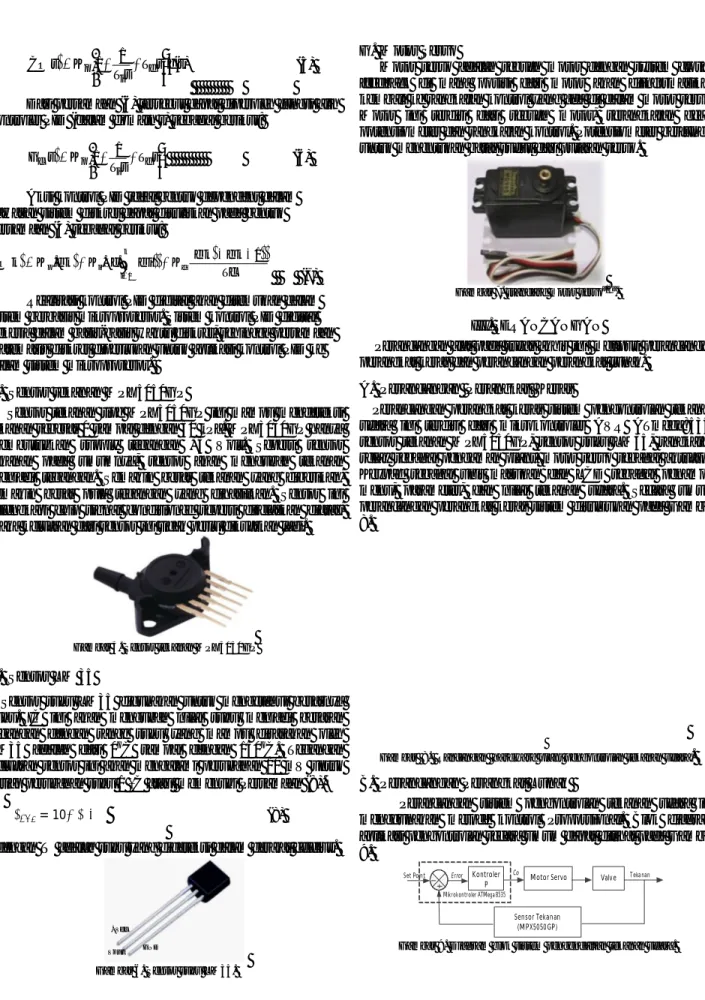
Gambar 3 Respon Tangga percobaan BumpTest untuk model FOPDT
Gambar 3 diatas merupakan grafik respon tangga percobaan BumpTest yang mana parameter-parameter proses FOPDT (First Order Plus Ded Time) dapat dicari sebagai berikut:
a. Keterlambatan transportasi proses (L) = waktu yang terjadi pada proses yang dihitung sejak terjadi perubahan tangga pada CO sampai variabel proses (PV) yang dikontrol mulai menanggapi perubahan input CO. b. Konstanta waktu (T) = Waktu yang di perlukan sehingga
nilai PV mencapai kurang lebih 63 % dari keadaan steady akhir setelah waktu tunda.
c. Gain Statis Proses (K) = Perbandingan perubahan PV terhadap perubahan CO dalam keadaan steadynya. Gain statis bisa bernilai positif maupun negatif tergantung jenis kontrol valve yang di gunakan.
0 1 0 1 CO CO PV PV CO PV K (3)
D. Kontrol Proporsional, Integral, dan Derivatif (PID)
Kontrol PID merupakan gabungan dari tiga macam metode kontroler, yaitu pengontrol proporsional (Proportional Controller), pengontrol integral (Integral Controller), dan pengontrol turunan (Derivative Controller).
Kp Td.S + -SP PV e + + co 1 Ti.S +
Gambar 4. Struktur kontrol PID ideal bentuk dependent.
Gambar 4 menunjukkan struktur kontrol PID ideal. Struktur kontrol PID ideal merupakan struktur kontrol PID yang umum dijumpai.. Persamaan (5) memperlihatkan bentuk
umum dari kontrol PID ideal tersebut dalam bentuk kontinyu.
t d i p dt t de T dt t e T t e K t CO 0 . . 1 (4)Secara praktis, struktur kontrol PID pada persamaan (4) dikenal juga dengan istilah PID ideal bentuk dependent. Istilah tersebut mengacu pada dependensi (ketergantungan) setiap suku persamaan terhadap nilai gain proporsional (Kp) Dalam
3
1 1 T s e(s) s T K s CO d i p (5) Dari persamaan (6) tersebut dapat diperoleh fungsi alih kontroler PID (dalam domain s) sebagai berikut:
T s s T K s G d i p c 1 1 (6)Aksi kontrol PID ideal bentuk dependent dalam kawasan sistem diskret dapat dituliskan pada bentuk persamaan (4) sebagai berikut:
Tc k e k e K i e Tc K k e K k CO d k i i p 1 . . . 0
(7)Realisasi kontrol PID digital akan ditemukan dalam sistem berbasis mikroprosesor. Sistem kontrol PID digital bekerja dalam basis-basis waktu diskret, sehingga persamaan matematis diskret diperlukan untuk aplikasi kontrol PID ke dalam sistem mikroprosesor.
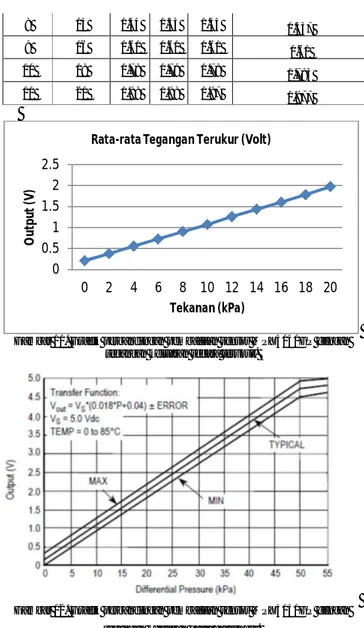
E. Sensor tekanan MPX5050GP
Sensor tekanan tipe MPX5050GP ini mampu mendeteksi tekanan sebesar 0 sampai dengan 50 kPa. MPX5050GP hanya membutuhkan supply tegangan +5 Volt. Seperti sensor takanan pada umumnya, sensor akan mengubah tekanan menjadi tegangan. Semakin besar tekanan yang diberikan, semakin besar pula tegangan yang dihasilkan. Sensor ini dilengkapi chip signal conditioned seperti dijelaskan diatas, maka keluaran dari sensor ini tidak perlu dikuatkan lagi.
Gambar 5. Sensor tekanan MPX5050GP
F. Sensor LM 35
Sensor suhu LM35 digunakan untuk mengetahui besarnya suhu. IC ini akan mengubah nilai suhu menjadi besaran tegangan dengan range suhu yang mampu dirasakan oleh LM35 adalah dari 0oC sampai dengan 150oC. Tegangan keluaran sensor ini akan mengalami perubahan 10 mV untuk setiap perubahan suhu 1 C atau memenuhi Persamaan (8).
= 10 (8)
dengan T adalah suhu yang dideteksi dalam derajat celcius.
+Vcc
Vout GND
Gambar 6. Sensor suhu LM35.
G. Motor Servo
Motor servo adalah sebuah motor dengan system closed feedback di mana posisi dari motor akan diinformasikan kembali ke rangkaian kontrol yang ada di dalam motor servo. Motor ini terdiri dari sebuah motor, serangkaian gear, potensiometer dan rangkaian kontrol. Potensiometer berfungsi untuk menentukan batas sudut dari putaran servo.
Gambar 7. standard motor servo[15].
III. PERANCANGAN
Perancangan alat pada tugas akhir ini meliputi perancangan perangkat keras dan perancangan perangkat lunak.
A. Perancangan Perangkat Keras
Perancangan perangkat keras sistem pengontrolan tekanan udara ini terdiri dari mikrokontroler AVR ATmega8535, sensor tekanan MPX5050GP, sensor suhu LM35, rangkaian relay sebagai pengaman plant, motor servo sebagai aktuator, Keypad sebagai unit masukan dan LCD sebagai penampil menu, parameter, dan nilai tekanan udara. Secara umum perancangan perangkat keras sistem ditunjukan pada Gambar 8.
Gambar 8. Rancangan hardware plant pengontrolan tekanan udara.
B. Perancangan Perangkat Lunak
Perancangan sistem pengontrolan tekanan udara ini menggunakan metode kontrol Proporsional. Blok diagram aplikasi pengontrolan secara umum dapat dilihat pada Gambar 9.
Set Point Kontroler
P Motor Servo Sensor Tekanan (MPX5050GP) Error Co Tekanan Valve Mikrokontroler ATMega 8535
4
Masukan dari kontrol Proporsional adalah error tekanan udara. Error akan diolah oleh algoritma kontrol Proporsional sehingga menghasilkan sinyal kontrol yang diumpankan ke valve melalui motor servo.Flowchart program utama diperlihatkan pada Gambar 10.
Keypad D Ditekan ? Keypad C Ditekan ? Keypad * Ditekan ? Ya Ya Ya Tekanan >20 kPa atau suhu >35oC?
Tekanan >20 kPa atau suhu >35oC?
Heater mati Heater mati Selesai Selesai Tidak Ya Tidak Tidak Tidak
Gambar 10. Flowcart program pengendalian tekanan udara.
IV. PENGUJIANDANANALISA A. Pengujian Sensor MPX5050GP
Pengujian terhadap sensor MPX5050GP dilakukan dengan mengukur tegangan keluaran sensor tekanan. Pembacaan sensor tersebut kemudian dibandingkan dengan grafik pengujian pada datasheet. Data hasil pengukuran yang dilakukan dapat dilihat pada Tabel 4.1.
Tabel 1. Hasil keluaran tegangan pembacaan sensor MPX5050GP.
No Tekanan (kPa) Tegangan Terukur (Volt) Rata-rata Tegangan Terukur (Volt) 1 0 0.21 0.21 0.21 0.21 2 2 0.38 0.38 0.38 0.38 3 4 0.56 0.55 0.56 0.557 4 6 0.73 0.74 0.73 0.73 5 8 0.90 0.91 0.91 0.907 6 10 1.08 1.07 1.08 1.077 7 12 1.26 1.25 1.26 1.257 8 14 1.44 1.43 1.44 1.437 9 16 1.61 1.61 1.61 1.61 10 18 1.78 1.79 1.78 1.783 11 20 1.98 1.98 1.97 1.977
Gambar 11. Grafik perbandingan pembacaan sensor MPX5050GP dengan tegangan keluaran secara terukur.
Gambar 12. Grafik perbandingan pembacaan sensor MPX5050GP dengan tegangan keluaran pada datasheet.
B. Pengujian Sistem
1) Pengujian Kalang Terbuka (Bumptest)
Karakteristik plant sistem pengendalian tekanan udara dapat diketahui dengan melakukan pengujian kalang terbuka. Hubungan antara CO (sinyal kontrol) dan PV (deviasi output proses) pada hasil eksperimen bump test pengujian kalang terbuka ditunjukkan pada Gambar 13.
0 0.5 1 1.5 2 2.5 0 2 4 6 8 10 12 14 16 18 20 O u tp u t (V ) Tekanan (kPa) Rata-rata Tegangan Terukur (Volt)
5
Gambar 13. Pengujian Bump Test bertekanan dengan tekanan awal 10 kPa dan ΔCO = 8%.
Nilai keterlambatan transportasi (L) respon sistem tersebut sangatlah kecil maka dapat diabaikan dan Gain statis proses (K) yang dimiliki model FOPDT didapatkan dari perhitungan berikut: 0 1 0 1 CO CO PV PV CO PV K (9) ) % ( 235 . 1 0 8 10 12 . 0 kPa K
Sedangkan nilai T ditentukan dari 63% ΔPV yang didapatkan dari perhitungan berikut:
63% ΔPV = 0.12 + (63% (10 0.12)) = 0.12 + 6.2244
= 6.3444 kPa
Sehingga pada saat 63% ΔPV , nilai T = 115 detik
Berdasarkan pengujian dapat diketahui bahwa proses pada sistem adalah reverse. Sehingga dapat diperoleh persamaan matematis fungsi alih sistem.
sL e Ts K s co s pv s H 1 ) ( ) ( ) ( (10) 1 115 235 . 1 ) ( s s H
2) Pengujian dengan Referensi tetap
Pengujian ini dilakukan dengan memberikan setpoint tetap dengan suhu awal air sebesar 100°C. Berikut ini adalah hasil pengujiannya.
Gambar 14. Respon sistem kontrol Proporsoinal pada setting point 5 kPa.
Gambar 15. Respon sistem kontrol Proporsional pada setting point 10 kPa.
Gambar 16. Respon sistem kontrol Proporsional pada setting point 15 kPa. Tabel 2. Karakteristik respon sistem pengendalian tekanan udara pada setting
point tetap. Suhu Awal (kPa) Tekanan Awal (kPa) Setting Point (kPa) Tr (detik) Ts (detik) 100 0 5 73 85 100 0 10 160 185 100 0 15 302 357
Pada Tabel 2 ditunjukkan bahwa respon sistem dengan setting point semakin besar akan mengakibatkan waktu naiknya (Tr) semakin besar. Gambar 14, Gambar 15, dan
Gambar 16. menunjukkan respon sistem relatif stabil untuk mencapai variasi nilai setting point 5, 10 dan 15 kPa tanpa adanya overshoot dan osilasi.
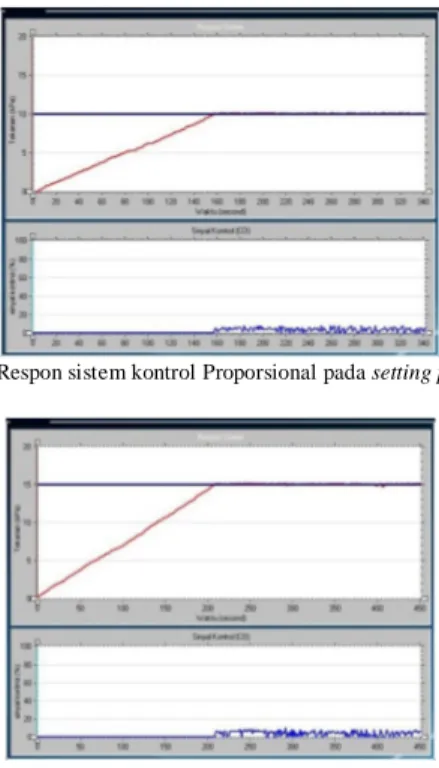
3) Pengujian Kontrol Proporsional pada Setting Point Naik
Pengujian dengan setting point naik ini bertujuan untuk mengetahui kecepatan respon kendali sistem terhadap perubahan kenaikan setting point. Pengujian ini dilakukan dengan menggunakan nilai parameter Kp = 40. Berikut adalah gambar grafik untuk pengujian set point naik.
6
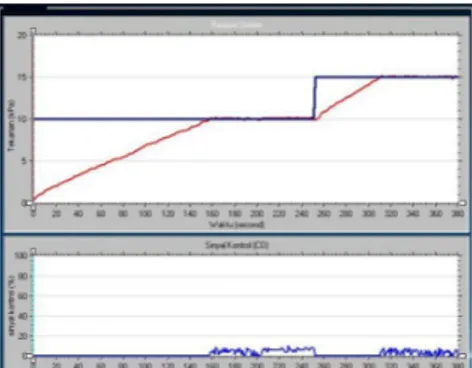
Gambar 17. Respon Sistem pada perubahan setting point naik.
Gambar 17 menunjukkan pengujian respon sistem pengendalian tekanan udara pada perubahan setting point naik atau semakin besar dengan lama pengujian 380 detik. Pada awalnya sistem diberi setting point tinggi sebesar 10 kPa dengan tekanan awal 0 kPa. Waktu naik (Tr) yang diperlukan
untuk mencapai setting point tersebut adalah 159 detik. Sistem telah mencapai keadaan steady dengan waktu penetapan (Ts)
165 detik.
Ketika sistem melakukan perubahan setting point dari 10 kPa menjadi 15 kPa waktu naik (Tr) yang diperlukan
adalah 311 detik dan waktu penetapan (Ts) 331 detik, tanpa
overshoot. Waktu yang diperlukan untuk mencapai setting point baru ketika setting point naik relatif lebih cepat karena terbentuknya steam dipengaruhi juga oleh suhu air. Semakin tinggi suhu air maka kecepatan kecepatan untuk menghasilkan steam akan makin cepat pula.
4) Pengujian Kontrol Proporsional pada Setting Point Turun
Pengujian dengan setting point turun ini bertujuan untuk mengetahui kecepatan respon kendali sistem terhadap perubahan penurunan setting point.
Gambar 18. Respon Sistem pada perubahan setting point turun.
Gambar 18 menunjukkan pengujian respon sistem pengendalian tekanan udara pada perubahan setting point turun atau semakin kecil dengan lama pengujian 448 detik. Pada awalnya sistem diberi setting point tekanan sebesar 18 kPa dari tekanan awal 0 kPa. Waktu naik (Tr) yang diperlukan
untuk mencapai setting point tersebut adalah 272 detik dan waktu penetapan (Ts) 286 detik.
Ketika sistem melakukan perubahan setting point dari 18 kPa menjadi 14 kPa waktu naik (Tr) yang diperlukan
untuk mencapai setting point baru adalah 372 detik dan waktu penetapan (Ts) 389 detik dengan overshoot.
5) Pengujian Kontrol Proporsional terhadap Gangguan
Daya tahan sistem terhadap gangguan dan kecepatan respon sistem untuk kembali ke referensi setelah gangguan, dapat diketahui dengan melakukan pengujian dengan memberikan gangguan berupa pembukaan valve 2 pada sistem yang telah mencapai kestabilan pada suatu nilai referensi. Pemberian gangguan sesaat dilakukan selama 20 detik dengan membuka katup valve 2 setelah itu valve 2 dinormalkan kembali.
Gambar 19. Respon sistem kontrol Proporsional terhadap gangguan.
Pada Gambar 19. menunjukkan respon sistem terhadap gangguan sesaat berupa bukaan valve 2 selama 20 detik pada setting point 13 kPa. Pada gangguan sesaat, terjadi penurunana tekanan sebesar 3,5 kPa dari keadaan steady-nya, untuk meningkatkan tekanan yang ada di dalam tabung akan memberikan respon dengan menutup valve.
V. PENUTUP A. Kesimpulan
Berdasarkan hasil pengujian dan analisis yang dilakukan didapatkan hal-hal penting sebagai berikut:
1. Hasil pengujian kalang terbuka dengan eksperimen bumptest untuk ΔCO = 8% dari CO awal 0%, plant sistem pengendalian tekanan udara termasuk model FOPDT dengan nilai L = 0 detik, T = 115 detik, dan K = 1,235 kPa/ %.
2. Pengujian untuk setting point tetap dengan tekanan awal sama yaitu 0 kPa, sistem mampu menghasilkan respon yang relative stabil untuk semua setting point tanpa adanya overshoot. Pada setting point 5 kPa Tr = 73 detik,
setting point 10 kPa Tr = 160 detik, dan pada setting point
15 kPa Tr = 302 detik.
3. Salah satu pengujian untuk mengetahui kestabilan system yaitu dengan pengujian setting point naik, respon sistem mampu mengikuti kenaikan setting point dengan rise time
7
relatif cepat karena terbentuknya steam dipengaruhi juga oleh suhu air. Semakin tinggi suhu air maka kecepatan untuk menghasilkan steam akan makin cepat pula. Saat mencapai setting point pertama 10 kPa dari tekanan awal 0 kPa, Tr sebesar 159 detik dan Ts sebesar 165 detik.Ketika sistem melakukan perubahan setting point menjadi 15 kPa, Tr dan Ts yang diperlukan adalah 311 detik dan
331 detik tanpa overshoot.
4. Pada setting point turun respon sistem mampu mengikuti penurunan setting point dengan rise time relatif cepat. Saat mencapai setting point yang pertama 18 kPa dari tekanan awal 0 kPa, memiliki Tr sebesar 272 detik dan Ts
sebesar 286 detik. Ketika sistem melakukan perubahan setting point menjadi 14 kPa, Tr dan Ts yang diperlukan
adalah 372 detik dan 389 detik dengan overshoot. 5. Pengujian respon sistem terhadap gangguan sesaat pada
setting point 5 kPa selama 20 detik, sistem mampu merespon dengan waktu pemulihan relatif cepat dan berupaya untuk menyesuaikan respon pada keadaan steadynya walaupun terjadi osilasi di bawah setting point nya sebesar 3,5 kPa .
B. Saran
Ada beberapa hal yang dapat dilakukan dalam pengembangan sistem pengontrolan tekanan ini, antara lain yaitu :
Menggunakan tabung yang lebih kuat sehingga dapat memaksimalkan tekanan pada sensor.
Harus memperhatikan peristiwa fisika sehingga dapat meminimalkan terjadinya kerusakan alat.
Menggunakan sensor dengan kapasitas tekanan maksimal yang lebih besar dan tahan oleh suhu tinggi. Menambah system contohnya pengontrolan tekanan
untuk mengatur level cairan, sebagai alat ukur besaran tekanan , dan lain-lain.
Mengunakan metode pengontrolan lain seperti fuzzy, fuzzy sebagai tuning PID, Jaringan Syaraf Tiruan, Algoritma Genetik.
DAFTAR PUSTAKA
[1] Barmawi, M. 1996. Prinsip-prinsip Elektronika. Jakarta : Erlangga.
[2] Djokosetyardjo,M.J.1990.Ketel Uap.Jakarta: Pradnya Paramita.
[3] Mu’amar, Awal. 2007. Perancangan Sistem Control Level Dan Pressure Pada Boiler Di Workshop Intrumentasi Berbasis Dcs Centum Cs3000 Yokogawa. Surabaya: ITS.
[4] Ogata, Katsuhiko.1994. Teknik Kontrol Automatik Jilid 1, terj. Edi Leksono. Jakarta: Erlangga
[5] Ogata, Katsuhiko. 1994. Teknik Kontrol Automatik Jilid 2, terj. Edi Leksono, Jakarta: Erlangga.
[6] Rachmawati, Ika Nurina. 2010. Perancangan Sistem Pengaman Pada Tangki Kerosin Bertekanan Dengan Menggunakan Pengendalian On/Off Berbasis
Mikrokontroller Di Workshop Instrumentasi. Surabaya: ITS.
[7] Seiko Instrument Inc. Liquid Crystal Display Module M1632 : User Manual. Japan. 1987.
[8] Setiawan,Iwan.2008.Kontrol PID untuk Proses Industri. Jakarta: Elex Media Komputindo.
[9] Smith, A. Carlos. 1997. Principles and Practice of Automatic Process Control. John Wiley Son.Inc.
[10] Welander, Peter. Understanding Derivative in PID Control. Control Engineering, 2, 24-27-2012.
[11] ---, ATmega8535 Data Sheet, [12] http://www.atmel.com [13] http://www.datasheetdir.com/MPX5050GP [14] http://www.energyefficiencyasia.org [15] http://www.IlmuKomputer.com [16] http://www.national.com/ds/LM/LM35.pdf [17] http://www.servodatabase.com BIODATA MAHASISWA Ayuta Anindyaningrum (L2F 607 012)
Saat ini sedang melanjutkan studi pendidikan strata I di Jurusan Teknik Elektro, Fakultas Teknik Universitas Diponegoro Konsentrasi Kontrol.
Mengetahui dan mengesahkan, Dosen Pembimbing I Sumardi,ST,MT NIP.196811111994121001 Tanggal:____________ Dosen Pembimbing II Budi Setiyono, ST, MT NIP.197005212000121001 Tanggal: ___________