41
PERANCANGAN SISTEM
3.1 Penjelasan Sistem Secara Umum
Sistem sortir mur dan baut ini terdiri dari beberapa rangkaian sub sistem yang saling melengkapi. Di mana setiap sistem memberikan peran yang berbeda. Subsistem yang ada adalah : (lihat gambar 3.1)
Kame ra kabel USB IBM Compatible kabel Paralel sabuk berjalan Modul pemisah
Gambar 3.1 Diagram Sistem Sortir
a. Sub sistem input
Sub sistem input ini akan menghasilkan masukan suatu nilai data citra dari obyek menuju sistem sortir ini. Alat yang digunakan adalah sebuah kamera digital yang dapat berfungsi sebagai pc-cam. Dari input kamera yang terhubung ke komputer melalui sambungan USB maka data yang telah didapat, disimpan dalam media penyimpanan.
Proses pengambilan data citra dari kamera PC menggunakan suatu perangkat lunak Peephole Video Capture V3.0 copyright © 1998, 1999, 2000. Program ini dibuat oleh Specware Inc. bertempat di 218 Louisiana Ave Perrysburg, OH 43551. Program ini akan mengambil citra yang terlihat pada jendela preview peephole dan menyimpannya pada media penyimpanan. (lihat gambar 3.2)
Gambar 3.2 Jendela Preview Pada Peephole
b. Sub sistem proses
Sub sistem ini akan mengolah data citra yang masuk atau yang telah disimpan oleh sub sistem input. Proses pengolahan menggunakan suatu program yang dibuat dengan perangkat lunak MATLAB (GUI pada MATLAB). Program yang dibuat ini terdiri dari beberapa proses:
1. Mengambil data yang tersimpan dalam media penyimpanan.
2. Memunculkan data itu dalam GUI dan mentransformasi data tersebut dalam bentuk lain. Karena data yang diambil berbentuk citra maka transformasi citra dilakukan seperti pengecilan ukuran gambar, cropping dan edge detection..
3. Data yang sudah berubah akan dimasukan ke dalam suatu list program yang utama yaitu jaringan syaraf tiruan. Jaringan syaraf tiruan ini akan memproses data dengan pelatihan backpropagation sehingga akan menghasilkan keluaran. Keluaran yang dihasilkan hanya terdiri dari 2 jenis yaitu output 1 atau 0.
c. Sub sistem output
Sub sistem ini akan menerima output dari sub sistem proses dan menjalankan proses pengiriman data ke parallel port. Pengiriman data pada parallel port ini akan menggerakkan modul pemilih yang berfungsi memisahkan barang atau obyek.
3.2. Rancangan Perangkat Keras 3.2.1. Blok Diagram Sistem Sortir
Gambar 3.3. Blok Diagram Sistem Sortir
Gambar di atas menunjukkan diagram blok sistem sortir di mana bagian-bagian dan hubungan antara modul-modul dari sistem tersebut akan dijabarkan sebagai berikut :
Kamera PC Komputer Program peephole V3.0 Program MATLAB Modul pemilih
Modul kamera PC mendapatkan data citra dari obyek pada modul sabuk berjalan dan mengirimkannnya ke komputer dengan bantuan program peephole dan kemudian diproses oleh program MATLAB. Hasil keluaran dari program MATLAB diberikan kepada modul pemilih.
3.2.2. Modul-Modul Sistem dan Fungsinya 1. Modul Kamera PC
Kamera yang digunakan adalah kamera digital FUJIFILM finePix 202 yang bisa terkoneksi ke komputer menggunakan kabel USB. (lihat gambar 3.4)
Gambar 3.4. Kamera Digital
Untuk meningkatkan kualitas citra dari obyek yang terletak pada modul sabuk berjalan maka digunakan sebuah alat penerangan berupa lampu neon yang dipasang mengelilingi kamera. Lampu yang digunakan memiliki daya sebesar 22 watt.
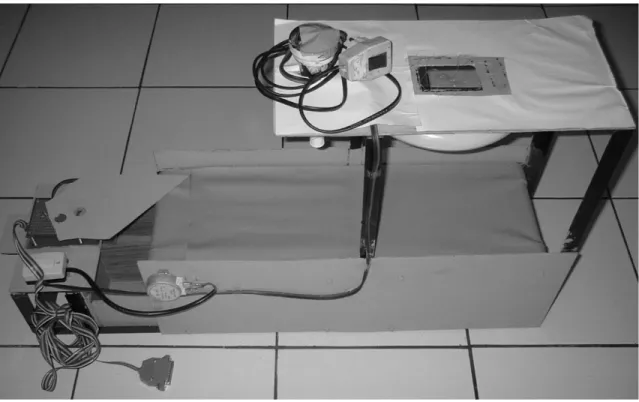
2. Modul Sabuk Berjalan
Modul sabuk berjalan merupakan alat bantu tambahan pada sistem. Alat ini hanya berfungsi membantu dalam proses uji coba dan merupakan simulasi dari proses produksi yang sebenarnya.
Pada modul sabuk berjalan dipasang sebuah motor AC untuk memutar sabuk. Kecepatan rata-rata berputar modul sabuk berjalan dari ujung yang satu ke ujung lainnya dengan panjang 60 cm yaitu 6 cm/detik. Sabuk yang berputar ini memakai warna terang (coklat muda) agar citra yang ditangkap oleh modul kamera mempunyai kualitas yang baik di mana bentuk dari obyek tersebut dapat terlihat dengan jelas. (lihat gambar 3.5)
Gambar 3.5 Modul Sabuk Berjalan
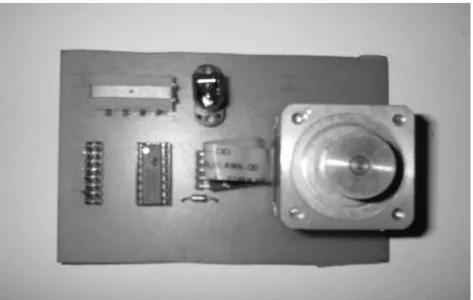
3. Modul Pemilih
Gambar 3.6 Modul Pemilih
Dari gambar 3.6 dapat dilihat bahwa modul pemilih terdiri dari pin-pin yang merupakan pin input data dari sub sistem output yang kemudian data tersebut diperkuat oleh IC ULN 2003 sehingga dapat digunakan oleh stepper motor yang akan bergerak ke arah yang diinginkan. Modul ini menggunakan daya 12 volt DC yang bisa terhubung dengan adaptor maupun dengan power supply komputer. Daya 12 volt ini diperlukan oleh IC 2003 dan stepper motor. Pada rangkaian terdapat dioda zener yang digunakan untuk menahan arus balik yang timbul oleh perubahan stepper motor yang dapat merusak IC ULN 2003.
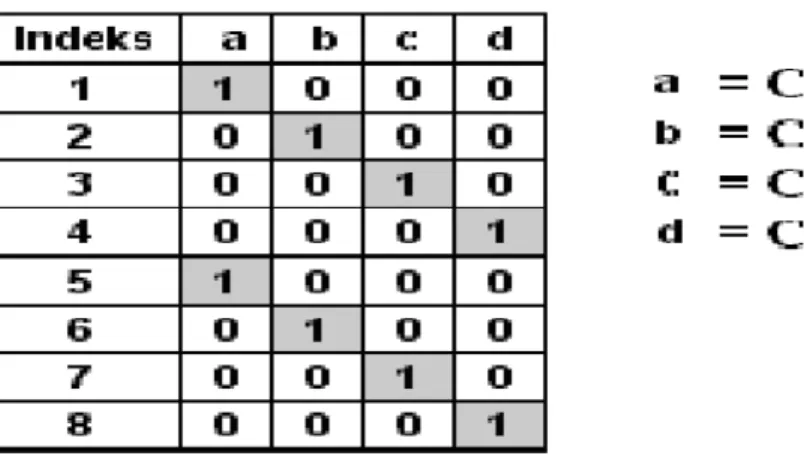
Tabel 3.1. Langkah Motor Stepper
Modul pemilih menggunakan motor stepper yang dikendalikan oleh port paralel. Pada port parallel terdapat 8 buah jalur data (D0,D1,D2,…,D7), akan tetapi untuk mengendalikan motor stepper hanya menggunakan 4 buah jalur data yaitu D1, D3, D5 dan D7. Penentuan jalur data ini disesuaikan dengan kabel penghubung paralel.
Tabel 3.2. Nilai Data Untuk Motor Stepper
D7 D6 D5 D4 D3 D2 D1 D0 0 X 0 X 0 X 1 X 0 X 0 X 1 X 0 X 0 X 1 X 0 X 0 X 1 X 0 X 0 X 0 X D7 D6 D5 D4 D3 D2 D1 D0 Decimal 0 1 0 0 0 0 1 0 66 0 1 0 0 1 0 0 0 72 0 0 1 1 0 0 0 0 48 1 0 0 0 0 0 0 0 128
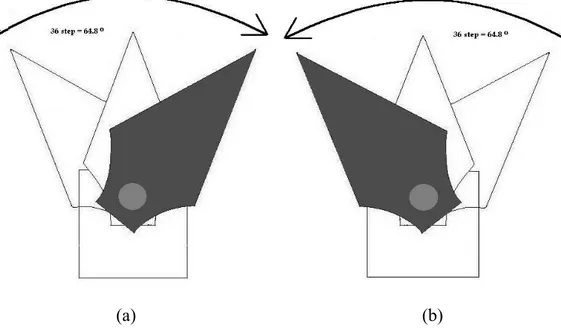
Dalam program sistem sortir mur dan baut pada bagian program MATLAB digunakan 4 nilai data yatiu 66, 72, 48 dan 128 untuk mengontrol coil dari motor stepper. Motor stepper dari modul ini dapat berputar sesuai dengan input yang diberikan. Motor stepper akan berputar ke arah kiri sebanyak 36 step jika benda yang dikenali oleh jaringan syaraf tiruan berupa baut, sebaliknya jika benda yang dikenali oleh jaringan berupa mur maka motor stepper akan berputar ke arah kanan sebanyak 36 step juga. Pada motor stepper, satu step bernilai 1.8 derajat.
Pada motor stepper dipasangkan penunjuk, penunjuk tersebut akan menahan benda yang akan dipisahkan sehingga benda jatuh pada tempat yang sesuai.. Posisi awal dari penunjuk yang terletak pada motor stepper mengarah ke kiri sabuk berjalan. Penunjuk akan bergerak sesuai dengan obyek yang dikenali. Pada saat awal aplikasinya, jika jaringan mengenali obyek berupa mur tentunya pemilih akan berputar ke arah kanan, sebaliknya jika jaringan mengenali obyek berupa baut maka penunjuk diam tak bergerak karena posisi pemilih saat itu sudah mengarah ke kiri. (lihat gambar 3.8)
(a) (b)
4. Kabel USB
Kabel USB digunakan untuk menghubungkan kamera digital dengan komputer dengan bentuk sebagai berikut: (lihat gambar 3.9)
Gambar 3.9. Kabel USB
5. Kabel Penghubung Port Paralel
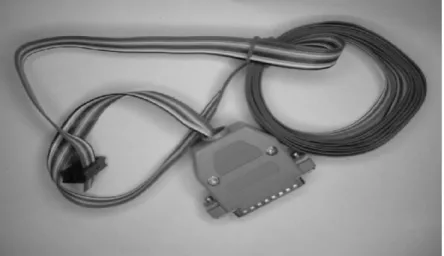
Antara komputer dengan modul pemilih diperlukan suatu penghubung untuk transmisi data. Penghubung yang digunakan digambarkan sebagai berikut: (lihat gambar 3.10)
Kabel penghubung ini mempunyai 10 jalur kabel, dengan ujung penghubung berbentuk kepala LPT1 dan di ujung satu lagi berbentuk kepala IDE. Di bawah ini penjelasan mengenai jalur kabel mana saja yang terhubung dengan pin-pin paralel. (lihat gambar 3.11)
Gambar 3.11. Kabel Penghubung Parallel Port yang Diperbesar Tabel 3.3. Hubungan Jalur Kabel Pada Kabel Penghubung Parallel Port
Kabel Penjelasan 1 Kabel ini terhubung dengan pin 18 (sebagai pin ground)
2 Tidak terhubung 3 Tidak terhubung
4 Kabel ini terhubung dengan pin 9 (sebagai pin data ke-7) 5 Tidak terhubung
6 Kabel ini terhubung dengan pin 7 (sebagai pin data ke-5) 7 Tidak terhubung
8 Kabel ini terhubung dengan pin 5 (sebagai pin data ke-3) 9 Tidak terhubung
3.3. Rancangan Piranti Lunak
Rancangan sistem atau software yang digunakan terdiri dari 2 software yaitu; 3.3.1 PeepHole Video Capture V3.0
Program ini merupakan program yang sudah ada. Sehingga penulis hanya menggunakannya saja. Fungsi-fungsi yang ada dalam peephole adalah untuk
meng-capture atau mengambil citra dan menyimpannya dalam bentuk data di media
penyimpanan.
Proses pengambilan citra oleh program peephole dilakukan secara otomatis oleh komputer selama selang waktu 2 detik. Citra yang telah diambil kemudian disimpan pada media penyimpanan komputer pada directory ‘D:\Gambar Skripsi\’ dengan nama file ‘gambar.jpg’.
3.3.2 Software MATLAB
3.3.2.1 Perancangan Data Training
Sebelum sistem sortir dapat diaplikasikan, terlebih dahulu dilakukan pengambilan dan pengolahan data untuk proses pelatihan. Data yang diambil sebanyak 1200 data citra yang terbagi atas data citra mur sebanyak 600 data dan data citra baut sebanyak 600 data juga. Citra tersebut diambil dengan obyek mur dan baut masing-masing diletakkan pada posisi kanan atas, kiri atas, tengah, kanan bawah dan kiri bawah. Dari setiap posisi obyek tersebut, obyek diputar sebesar 3 derajat sehingga setiap posisi memberikan 120 buah data citra. (lihat gambar 3.12)
Data citra mur dan baut sebanyak 1200 buah data ini diperlukan untuk memvariasikan obyek mur dan baut jika diletakkan di sembarang posisi dalam proses aplikasinya nanti.
Gambar 3.12. Posisi Peletakkan Obyek Untuk Data Pelatihan
3.3.2.2 Rancang Jaringan Syaraf Tiruan
Model jaringan syaraf tiruan yang digunakan pada sistem sortir terdiri dari beberapa model layer dengan jumlah neuron yang berbeda, yaitu :
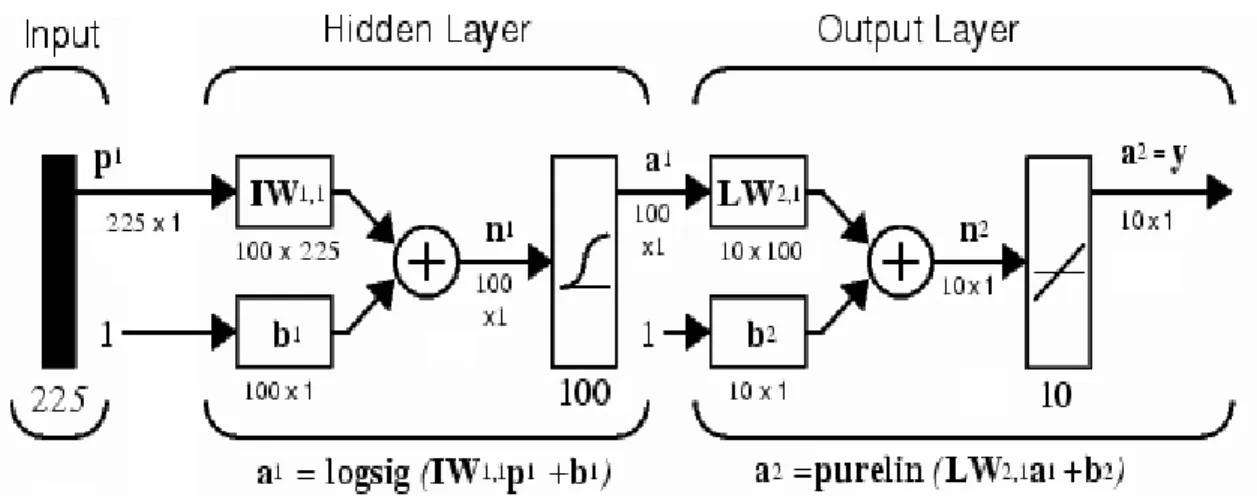
a. Jaringan 225 – 100 – 10
Jaringan syaraf tiruan ini terdiri dari 3 layer yaitu layer input dengan jumlah neuron sebesar 225 buah, hidden layer dengan jumlah neuron sebesar 100 buah dan layer output dengan jumlah neuron sebesar 10 buah. (lihat gambar 3.13)
b. Jaringan 225 – 50 – 10
Jaringan syaraf tiruan ini terdiri dari 3 layer yaitu layer input dengan jumlah neuron sebesar 225 buah, hidden layer dengan jumlah neuron sebesar 50 buah dan layer output dengan jumlah neuron sebesar 10 buah. (lihat gambar 3.14)
Gambar 3.14. Jaringan 225 – 50 – 10.
c. Jaringan 225 – 25 – 5
Jaringan syaraf tiruan ini terdiri dari 3 layer yaitu layer input dengan jumlah neuron sebesar 225 buah, hidden layer dengan jumlah neuron sebesar 25 buah dan layer output dengan jumlah neuron sebesar 5 buah. (lihat gambar 3.15)
d. Jaringan 225 – 10 – 2
Jaringan syaraf tiruan ini terdiri dari 3 layer yaitu layer input dengan jumlah neuron sebesar 225 buah, hidden layer dengan jumlah neuron sebesar 10 buah dan layer output dengan jumlah neuron sebesar 2 buah. (lihat gambar 3.16)
Gambar 3.16. Jaringan 225 – 10 – 2.
e. Jaringan 225 – 5 - 2
Jaringan syaraf tiruan ini terdiri dari 3 layer yaitu layer input dengan jumlah neuron sebesar 225 buah, hidden layer dengan jumlah neuron sebesar 5 buah dan layer output dengan jumlah neuron sebesar 2 buah. (lihat gambar 3.17)
Dari jaringan-jaringan di atas menunjukkan adanya penggunaan fungsi transfer yaitu fungsi transfer log-sigmoid pada bagian hidden layer dan fungsi transfer linier pada bagian layer output. Fungsi transfer logsig menghasilkan nilai output antara 0 & 1 ,sedangkan fungsi transfer linear menghasilkan nilai sesuai dengan inputnya. (lihat gambar 3.18 dan gambar 3.19)
Gambar 3.18. Fungsi Transfer Log-Sigmoid.
Gambar 3.19. Fungsi Transfer Linier.
3.3.2.3 Rancang List Program Matlab 3.3.2.3.1 Rancang Program
a. Input Citra dan Pengolahan Citra
Dalam program MATLAB pengambilan file citra menggunakan sintaks ‘Imread (nama file.jpg)’, kemudian citra akan diubah dalam bentuk grayscale (keabu-abuan)
dengan sintaks ‘rgb2gray(RGB)’. Untuk tahap pertama dari pengolahan citra adalah mencari garis tepi (edge detection) dengan metode sobel. Metode sobel adalah metode untuk mencari garis tepi menggunakan aproksimasi Sobel terhadap citra sehingga memberikan nilai tepi pada koordinat di mana perubahan nilai yang paling maksimum. Setelah didapatkan garis tepi dari citra tersebut maka garis tepi akan diperluas dengan sintaks ‘imdilate(IM, SE)’ dan daerah bagian dalam dari garis tepi suatu obyek akan diisi dengan pixel-pixel gelap yang dikelilingi oleh garis tepi yang putih. Jika ada beberapa noise yang berada di sekeliling citra maka akan dihapus dan menyisakan obyek-obyek yang berada di tengah citra serta obyek tersebut akan diperhalus.
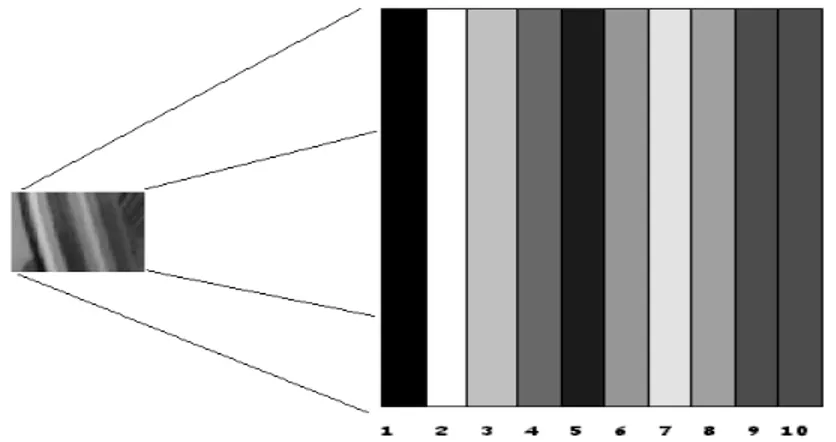
Pada tahap ke-2, proses yang dilakukan adalah mencari garis tepi dari citra yang sudah melalui pengolahan citra tahap pertama dan memperluas garis tepi dari citra tersebut. Proses pengolahan citra tersebut dilakukan untuk mendapatkan hasil citra yang baik. Hasil citra yang baik adalah citra yang memiliki garis tepi obyek yang halus dan berada di tengah citra. Setelah didapatkan hasil citra yang baik, dilakukan proses pemotongan (cropping) untuk obyek yang memiliki daerah bagian dalam garis tepi (region) yang terluas. (lihat gambar 3.20.(a)).
Pada proses pemotongan obyek perlu ditentukan terlebih dahulu tinggi dan lebar obyek yang akan dipotong. Setelah obyek terpotong maka dilakukan penyesuaian ukuran data menjadi matriks 15 x 15.( lihat gambar 3.20. (b)).
(a) (b)
Gambar 3.20. Hasil Pengolahan Citra Tahap 2 (a), Obyek yang Telah di-crop(b)
b. Pelatihan Jaringan Syaraf Tiruan
Citra yang telah melalui proses pengolahan citra siap untuk dimasukan ke dalam pelatihan jaringan syaraf tiruan. Akan tetapi citra tersebut perlu diubah tipe dan ukurannya. Tipe data citra yang mulanya berupa ‘uint8 array’ diubah menjadi ‘double array’ yang tujuannya agar bisa dilakukan perhitungan matematis. Ukuran data yang dapat masuk ke dalam jaringan syaraf tiruan berbentuk matrix satu baris, untuk itu dilakukan penyesuaian ukuran data dari citra yang di-crop.
Target jaringan syaraf tiruan untuk data citra ditentukan terlebih dahulu ukuran data yang sesuai dengan model jaringannya dan berisi nilai-nilai biner yang ditentukan. Nilai target akan bernilai satu jika obyek berupa baut dan akan bernilai nol jika obyek berupa mur. Setelah target dan input telah tersedia, bobot dan bias untuk hidden layer dan output layer diisi dengan nilai yang diacak (randomisasi). Selanjutnya proses pelatihan jaringan syaraf tiruan dimulai sampai error jaringan mencapai toleransi error
yang telah ditentukan. Proses pelatihan jaringan syaraf tiruan dapat dilihat pada bab 2 dalam sub bab “2.6.10.2. Algoritma Pelatihan”. Hasil yang didapatkan dari pelatihan jaringan syaraf tiruan berupa bobot dan bias untuk hidden layer dan output layer yang telah dikomputasi.
c. Pengiriman Data ke Port Paralel
Bobot dan bias yang telah didapatkan dari hasil pelatihan jaringan syaraf tiruan digunakan dalam proses aplikasi terhadap citra baru yang dimasukkan dalam jaringan. Dalam aplikasi jaringan syaraf tiruan dihasilkan output jaringan dengan ukuran sesuai dengan jumlah neuron dari layer output jaringan. Hasil output tersebut dicari rata-ratanya. Jika rata-ratanya bernilai lebih dari sama dengan 0,5 maka penunjuk pada modul pemilih akan berputar ke arah kiri. Sebaliknya jika rata-ratanya bernilai kurang dari 0,5 maka penunjuk pada modul pemilih akan berputar ke arah kanan.
3.3.2.3.2 Rancang GUI
Dalam perancangan GUI, aliran proses dapat dilihat pada bagan flowchart di bawah ini:
Training Mode
Application
Mode Close Select ModeInfo Old Training Training Info Stop Training New Training
Target Mur
dan Baut Begin Training Layer Design
Error
Tolerance Learning Rate
Stop Choose Network Start Application Info Select Mode
Gambar 3.21. GUI State Diagram
Program sistem sortir mur dan baut ini dibentuk dalam sebuah GUI (grafical
Gambar 3.22. Tampak Awal GUI
Pada gambar dapat terlihat beberapa bagian yang mempunyai fungsi berbeda. Yaitu “Select Mode”, “Training Mode” dan “Application Mode”.
Pada bagian “Select Mode” terdapat 4 tombol yaitu: a. Tombol Traning Mode.
Tombol ini berfungsi untuk mengaktifkan bagian Training Mode. b. Tombol Application Mode.
Tombol ini berfungsi untuk mengaktifkan bagian Application Mode. c. Tombol Close
Tombol ini berfungsi untuk menutup layar GUI sistem sortir mur dan baut. d. Tombol Info
Tombol ini berfungsi untuk memunculkan jendela informasi untuk bagian Select Mode.
Gambar 3.23. Training Mode Aktif
Gambar di atas menunjukan layar GUI ketika tombol “Training Mode” diaktifkan. Pada bagian “Taining Mode” terdapat bagian-bagian sebagai berikut:
a. Radio Button New Training
Tombol ini berfungsi untuk mengaktifkan fungsi-fungsi yang diperlukan untuk pelatihan jaringan baru.
b. Radio Button Old Training
Tombol ini berfungsi untuk mengaktifkan fungsi-fungsi yang diperlukan untuk pelatihan jaringan lama.
c. Fungsi Target
Fungsi ini terdiri dari 2 radio button yaitu baut dan mur. Radio button ini menentukan target pelatihan jaringan untuk input data citra yang dimasukkan.
d. Fungsi Layer Design
Fungsi ini memberikan 4 jenis pilihan jaringan yang akan dipakai pada pelatihan jaringan.
e. Fungsi Learning Rate
Fungsi ini memberikan pilihan nilai kecepatan jaringan (Learning Rate) dengan nilai antara 0,01 sampai 0,0001.
f. Fungsi Error Tolerance
Fungsi ini memberikan pilihan nilai toleransi kesalahan (Error Tolerance) dengan nilai antara 0,01 sampai 0,0001.
g. Tombol Begin Training.
Tombol ini berfungsi untuk menjalankan pelatihan dengan menggunakan parameter fungsi yang telah di tentukan.
h. Tombol Info
Tombol ini berfungsi menampilkan jendela informasi pada bagian training mode. i. Tombol Stop training.
Tombol ini berfungsi untuk mengakhiri pelatihan jaringan dan kembali ke bagian “Select Mode”.
Gambar 3.24. Application Mode Aktif
Gambar di atas menunjukan layar GUI ketika tombol “Application Mode” diaktifkan. Pada bagian “Application Mode” terdapat bagian-bagian sebagai berikut: a. Fungsi Choose Network
Fungsi ini akan mengambil nilai data yang disimpan dari proses pelatihan. Pilihan data yang tersedia yaitu Old Data, New1->225-100-10, New2->225-50-10,
New3->225-25-5, New4->225-5-2.
b. Tombol Start
Tombol ini berfungsi menjalankan proses aplikasi sortir mur dan baut. c. Tombol Stop
d. Tombol Info
Tombol ini berfungsi memunculkan jendela informasi untuk bagian “Application Mode”.
Untuk menjalankan program jaringan syaraf tiruan, jalankan program MATLAB. Pada command window MATLAB, ketik “sistemsortir”. Maka akan muncul jendela program sistem sortir mur dan baut pada monitor. (lihat gambar 3.21). Kemudian jalankan program bantuan Peephole untuk menangkap citra.
Pada jendela GUI program sistem sortir mur dan baut tekan tombol “Training mode” sehingga bagian “Training Mode” aktif. Pada bagian “Training mode” pilih new
training atau old training. Bila memilih new training, parameter-parameter jaringan
seperti target, layer design, learning rate dan error tolerance aktif kemudian masukan nilai parameter yang dikehendaki. Setelah semua parameter jaringan dimasukan, tekan tombol Begin Training yang menjalankan proses pelatihan untuk citra yang ada di layar. Jika ingin melatih beberapa citra maka tekan tombol begin training sebanyak yang diinginkan dengan mengubah target yang sesuai. Untuk mengakhiri proses pelatihan tekan tombol Stop Training. Bila memilih Old Training maka nilai weight dan bias dari hasil training sebelumnya akan di-load dan siap untuk pelatihan berikutnya.
Untuk mengaplikasikan jaringan yang telah dilatih tekan tombol “Application Mode” sehingga bagian “Application Mode” aktif. Pada “Aplication Mode”, pilih data jaringan yang dikehendaki baik itu data baru maupun data lama hasil pelatihan jaringan. Setelah itu tekan tombol Start untuk memulai aplikasi sistem sortir mur dan baut.
Gambar 3.25. Flowchart Menu Utama
Gambar 3.25 menunjukan rancangan utama perangkat lunak yang terdiri dari 2 bagian modus yaitu :
a. Modus pelatihan, bagian di mana sistem melakukan proses belajar dengan data citra masukan dan parameter jaringan yang ditentukan.
b. Modus aplikasi, bagian di mana sistem mencoba dan menerapkan apa yang telah didapatkan selama proses pelatihan.
3.3.2.5. Diagram-diagram Alir Rutin Pendukung 3.3.2.5.1 Rancangan Diagram Alir Modus Pelatihan
Mulai
Pilih modus operasi ?
Modus
pelatihan Modus Aplikasi
Akhir proses GUI
Gambar 3.26. Flowchart Pelatihan Bagian A
Mulai modus pelatihan
Pilihan Pelatihan? New Training Old Training Bobot dan Bias random new training 1 NewTraining1rand .mat Tentukan Parameter Jaringan Pilihan Jaringan Kecepatan jaringan Toleransi Kesalahan Target Jaringan 1 Jaringan 2 Jaringan 3 Jaringan 4 W dan B random untuk tiap jaringan NewTraining1rand.mat NewTraining2rand.mat NewTraining3rand.mat NewTraining4rand.mat B D
Gambar 3.27. Flowchart Pelatihan Bagian B
B
Proses gambar.jpg
(resize, cropping, edge detection)
Gambar.jpg Input jaringan B dan W dari pilihan jaringan yang dipilih NewTraining1rand.mat NewTraining2rand.mat NewTraining3rand.mat NewTraining4rand.mat oldtraining.mat Generate nilai bobot dan bias
Fase umpan maju dengan fungsi aktifasi logsig dan purelin
Fase umpan balik dengan fungsi aktifasi dlogsig dan dpurelin
Error sistem > error toleransi Perbaharui nilai
bobot dan bias
YA
Iterasi ++
Perbaharui nilai bobot dan bias
C tidak
Gambar 3.28. Flowchart Pelatihan Bagian C
Pada awal modus pelatihan, tentukan pilihan pelatihan jaringan. Ada 2 pilihan jaringan yaitu new training dan old training. Bila memilih pelatihan new training maka akan dilakukan pengacakan nilai untuk bobot dan bias dari jaringan pertama dan hasilnya disimpan pada file “NewTraining1rand.MAT”. Setelah itu, tentukan parameter jaringan seperti pilihan jaringan, kecepatan pelatihan, toleransi kesalahan dan target. Pada pilihan jaringan terjadi proses random nilai Weight dan Bias sesuai dengan jaringan yang dipilih dan disimpan pada file. Setelah semua parameter jaringan sesuai dengan yang dikehendaki, dilanjutkan proses pelatihan jaringan dengan mengambil data input jaringan berupa citra dalam nama file “gambar.jpg” dan nilai Weight dan Bias data
random. Dilanjutkan dengan proses pelatihan jaringan dengan mengenerate nilai bobot
Tulis nilai bobot dan bias akhir ke File C NewTraining1.mat NewTraining2.mat NewTraining3.mat NewTraining4.mat Oldtraining.mat D Pelatihan sudah selesai ? Berhenti Ya tidak
dan bias yang telah ditentukan dan memasuki fase umpan maju mengunakan fungsi
logsig dan purelin serta fase umpan balik menggunakan fungsi dlogsig dan dpurelin
yang berfungsi untuk menghitung nilai error sistem. Error sistem ini akan dibandingkan dengan toleransi kesalahan yang telah ditentukan di awal. Jika error sistem lebih besar dari toleransi kesalahan maka nilai bobot dan bias diperbaharui kemudian dimasukan kembali ke proses pelatihan jaringan sampai didapatkan error sistem yang lebih kecil dari toleransi kesalahan. Nilai bobot dan bias yang telah diperbaharui kemudian disimpan ke dalam suatu file dengan nama sesuai dengan jaringan yang dipilih. Setelah data bobot dan bias disimpan terdapat pilihan untuk melanjutkan pelatihan atau menyudahi pelatihan.
Untuk pilihan pelatihan jaringan old training hanya perlu memasukkan target jaringan. Kemudian dilanjutkan pada proses pengambilan input yang seterusnya sesuai dengan penjelasan di atas.
Mulai modus aplikasi
Pengambilan data bobot dan bias dari modus pelatihan
NewTraining1.mat NewTraining2.mat NewTraining3.mat NewTraining4.mat Oldtraining.mat ambil Proses gambar.jpg
(resize, cropping, edge detection)
Gambar.jpg Input jaringan
ambil
Generate nilai bobot dan bias
Fase umpan maju dengan fungsi aktifasi
logsig dan purelin
Tombol berhenti ditekan ? Mulai modus data parallel berhenti ya tidak Output jaringan Output
Gambar 3.29. Flowchart Aplikasi
Pada modus aplikasi, data bobot dan bias yang dibutuhkan dalam jaringan syaraf tiruan diambil dari file data yaitu file yang sesuai dengan pilihan jaringan. Setelah itu, diambil input jaringan yaitu file gambar.JPG yang sebelumnya sudah dimanipulasi dengan proses penyesuaian ukuran data ,cropping dan proses edge detection. Input tersebut akan diproses pada jaringan sehingga menghasilkan output yang sesuai dengan apa yang telah yang telah dilatih. Setelah semua input didapatkan maka proses jaringan syaraf tiruan dapat dilakukan dengan melalui proses fase umpan maju untuk menentukan output jaringan. Output jaringan itu dimasukan ke dalam modus data paralel. Modus aplikasi akan berhenti jika tombol berhenti ditekan. Bila tombol berhenti tidak ditekan maka proses ini akan berulang dengan input citra yang baru.
3.3.2.5.3. Rancangan Diagram Alir Modus Data Paralel
Modus data parallel
Data output jaringan Output jaringan Output jaringan=1 Output jaringan=0 Pemilih Ke Arah Kiri Pemilih Ke Arah Kanan selesai
Gambar 3.30. Flowchart Data Paralel
Pada modus data paralel, output jaringan syaraf tiruan pada modus aplikasi merupakan input untuk menentukan output data parallel. Jika output pada modus aplikasi bernilai 0 maka pemilih pada modul pemilih akan berputar ke arah kanan, sedangkan jika output pada modus aplikasi bernilai 1 maka pemilih pada modul pemilih akan berputar ke arah kiri.
3.4. Rancang Bangun
Rancang bangun sistem sortir mur dan baut terdiri dari modul kamera, modul pemilih dan modul sabuk berjalan.
3.4.1. Modul Kamera
Modul kamera diletakkan di atas modul sabuk berjalan dengan posisi kamera menghadap ke sabuk berjalan. Kamera dipasang dengan jarak sebesar 27 cm dari permukaan sabuk. Kamera dapat menangkap citra dengan resolusi sebesar 320 x 240 sehingga kamera melingkupi permukaan sabuk dengan panjang 24 cm dan lebar 20 cm. Resolusi dari kamera sebesar 320 x 240 sudah merupakan karakteristik dari kamera itu sendiri yang tidak dapat diubah-ubah.
Ukuran tinggi kamera tersebut diatur sedemikian rupa sehingga kamera dapat menangkap citra obyek jika diletakkan pada tepi sabuk serta juga ukuran tersebut disesuaikan dengan lebar dari sabuk berjalan agar tepi besi dari modul sabuk berjalan tidak terlihat.
Gambar 3.31. Rancang Bangun Modul Sabuk Berjalan
3.4.3. Modul Pemilih