SISTEM KEA
SEPEDA MO
Diajuka
M
Damas
PROGRA
FAKULT
UNIVE
i
TUGAS AKHIR
EAMANAN DAN PENGEND
OTOR MENGGUNAKAN M
PHONE
kan Untuk Memenuhi Salah Satu Syarat
Memperoleh Gelar Sarjana Teknik
Program Studi Teknik Elektro
Oleh :
asus Kristiyanto Purnomo Nugroho
NIM : 065114019
RAM STUDI TEKNIK ELEKTR
LTAS SAINS DAN TEKNOLO
VERSITAS SANATA DHARMA
YOGYAKARTA
2010
DALIAN
MOBILE
rat
ho
CONTROL
OF MOTOR
Presented a
To
In El
Damas
ELECTRICAL
SCIENCE
SANA
ii
FINAL PROJECT
OLLING AND SAFETY SYST
RCYCLE USING MOBILE P
d as Partial Fulfillment of the Requireme
o Obtain the Sarjana Teknik Degree
Electrical Engineering Study Program
asus Kristiyanto Purnomo Nugroho
NIM : 065114019
L ENGINEERING STUDY PR
E AND TECHNOLOGY FACU
ATA DHARMA UNIVERSITY
YOGYAKARTA
2010
STEM
PHONE
ments
ho
PROGRAM
ULTY
v
“Saya menyatakan dengan sesungguhnya bahwa tugas akhir yang saya tulis ini
tidak memuat karya atau bagian karya orang lain,
kecuali yang telah disebutkan dalam kutipan dan daftar pustaka,
sebagaimana layaknya karya ilmiah.”
Yogyakarta, 30 September 2010
vi
! "
#
! "
! "
#
#
vii
PUBLIKASI KARYA ILMIAH UNTUK
KEPENTINGAN AKADEMIS
Yang bertanda tangan di bawah ini, saya mahasiswa Universitas Sanata Dharma :
Nama : Damasus Kristiyanto Purnomo Nugroho
Nomor Mahasiswa : 065114019
Demi pengembangan ilmu pengetahuan, saya memberikan kepada Perpustakaan
Universitas Sanata Dharma karya ilmiah saya yang berjudul :
SISTEM KEAMANAN DAN PENGENDALIAN SEPEDA MOTOR
MENGGUNAKAN MOBILE PHONE
beserta perangkat yang diperlukan (bila ada). Dengan demikian saya memberikan kepada
Perpustakaan Universitas Sanata Dharma hak untuk menyimpan, mengalihkan dalam
bentuk media lain, mengelolanya dalam bentuk pangkalan data, mendistribusikan secara
terbatas, dan mempublikasikannya di internet atau media lain untuk kepentingan akademis
tanpa perlu meminta ijin dari saya maupun memberikan royalty kepada saya selama tetap
mencantumkan nama saya sebagai penulis.
Demikian pernyataan ini yang saya buat dengan sebenarnya.
Yogyakarta, 11 Oktober 2010
viii
Sistem perawatan sepeda motor membutuhkan pemanasan mesin sepeda motor. Oleh karena itu, supaya perawatan sepeda motor menjadi lebih mudah maka dibuat sistem pemanasan mesin sepeda motor secara otomatis. Selain itu, kasus pencurian kendaraan bermotor terus meningkat sehingga dibuat sistem untuk mengawasi sepeda motor yang memiliki jarak jangkauan yang lebih luas. Sistem keamanan dan pengendalian sepeda motor menggunakan mobile phone memberikan solusi untuk memudahkan perawatan dan mengamankan sepeda motor.
Sistem keamanan dan pengendalian sepeda motor menggunakan mobile phone
Siemens C55 yang mampu mengendalikan sistem alarm, pemanasan mesin, dan pelacakan sepeda motor. Pemilik kendaraan akan mengirim SMS (Short Message System) ke mobile phone server yang telah dipasang pada sepeda motor. Sistem pada mesin motor akan bekerja sesuai dengan informasi yang dikirim oleh mobile phone user. Hasil informasi akan diolah oleh mikrokontroller AtMega 8535. Sistem keamanan menggunakan sensor PIR yang mampu mendeteksi panas tubuh manusia dan sensor posisi kunci kontak yang mampu mendeteksi adanya perubahan posisi kunci kontak sepeda motor. Sistem pelacakan berdasarkan lokasi BTS menggunakan layanan LBS.
Sistem keamanan dan pengendalian sepeda motor sudah berhasil dibuat. Pemilik kendaraan dapat mengirim SMS untuk mengendalikan sepeda motor. Sistem keamanan telah mampu bekerja menggunakan sensor PIR dan kunci kontak serta dapat mengirim SMS “BAHAYA” ketika terjadi pencurian sepeda motor. Selain itu, sistem juga telah mampu melakukan pelacakan lokasi sepeda motor.
ix
A maintenance system of motorcycle needs motorcycle machine heating. Therefore, to make a motorcycle maintenance easier then made automatically motorcycle machine heating. Else, case of motorcycle robbing always increase, so made a system to watch motorcycle within reach widely. A safety and control system of motorcycle using mobile phone give solution to made maintenance and safety motorcycle take easy.
Controlling and safety motorcycle system used Siemens C55 mobile phone that can control alarm, heating machine, and trace of motorcycle. Owner of motorcycle will send SMS to mobile phone server on motorcycle. Motorcycle machine system will do working agree with information from mobile phone user. Information will processed by microcontroller ATmega8535. Safety motorcycle system used PIR sensor that can detect human body heat and ignition sensor that can detect position of ignition. A trace system based on BTS location that use LBS services.
Controlling and safety motorcycle system was successfully made. Owner of motorcycle can send SMS for control motorcycle. A safety system working good use PIR and ignition sensor along with send SMS “BAHAYA” when occur robbing of motorcycle. Else, a system can trace motorcycle location too.
x
Puji syukur dan terimakasih kepada Tuhan Yesus Kristus atas segala rahmat dan
bimbingan-Nya sehingga tugas akhir ini dapat diselesaikan dengan baik dan lancar. Penulis
berharap agar karya tulis ini dapat berguna bagi perkembangan ilmu pengetahuan pada bidang
kendali elektronika di Universitas Sanata Dharma.
Dalam proses penulisan tugas akhir ini penulis menyadari bahwa ada begitu banyak
pihak yang telah memberikan banyak bimbingan, perhatian dan bantuan sehingga tugas
akhir ini dapat terselesaikan. Oleh karena itu penulis ingin mengucapkan terima kasih
kepada :
1. Kedua orang tua yang tercinta atas dukungan semangat, doa dan kepercayaannya.
2. Ibu Ir.Theresia Prima Ari Setiyani, selaku pembimbing tugas akhir atas bimbingan,
dukungan, saran dan kesabaran bagi penulis dalam menyelesaikan tugas akhir ini.
3. Seluruh dosen teknik elektro atas ilmu yang telah diberikan selama penulis menimba
ilmu di Universitas Sanata Dharma.
4. Seluruh pihak yang telah membantu dalam proses penulisan tugas akhir ini.
Dengan rendah hati penulis menyadari bahwa tugas akhir ini masih jauh dari sempurna,
oleh karena itu berbagai kritik dan saran untuk perbaikan tugas akhir ini sangat diharapkan.
Akhir kata, semoga tugas akhir ini dapat bermanfaat bagi semua pihak. Terima kasih.
Yogyakarta, 11 Oktober 2006
xi
HALAMAN JUDUL (Bahasa Indonesia ... i
HALAMAN JUDUL (Bahasa Inggris) ... ii
HALAMAN PERSETUJUAN ... iii
HALAMAN PENGESAHAN ... iv
PERNYATAAN KEASLIAN KARYA ... v
HALAMAN PERSEMBAHAN ... vi
LEMBAR PERNYATAAN PERSETUJUAN PUBLIKASI KARYA ILMIAH UNTUK KEPENTINGAN AKADEMIS ... vii
INTISARI ... viii
ABSTRACT ... ix
KATA PENGANTAR ... x
DAFTAR ISI ... xi
DAFTAR GAMBAR ... xiv
DAFTAR TABEL ... xvi
BAB I. PENDAHULUAN 1.1. Latar Belakang... 1
1.2. Tujuan dan Manfaat penelitian ... 2
1.3. Batasan Masalah... 3
1.4. Metodologi Penelitian... 3
BAB II. DASAR TEORI 2.1. Mobile Phone 2.1.1. Komunikasi Serial Mobile Phone Nokia 3330……….. 5
2.1.2. Protokol F-Bus………...………. 6
2.1.3. Short Message Service (SMS) ……… 8
2.1.4. Mode Protokol Data Unit (PDU) ………. 8
2.2. Mikrokontroler AVR AtMega8535….……...………. 10
2.2.1. Arsitektur AVR AtMega8535………... .. 10
2.2.2. Deskripsi Mikrokontroler AtMega8535..11
2.2.3. Organisasi Memori AVR AtMega8535………….……... 12
xii
2.3. IC MAX232……….………... 13
2.4. Global System for Mobile Communication………..…... 14
2.4.1. Mobile Station (MS)………... 14
2.4.2. Base Station System (BSS)………. 15
2.4.3. Network Sub System (NSS)………... 15
2.4.4. Operation and Support System (OSS)……… 15
2.5. Location Based Service (LBS)……… 16
2.6. Passive Infra Red (PIR) AMN12111...……… 18
2.7. Transistor sebagai saklar…..………... 19
2.8. Keypad 4x4 …………...……….. 20
2.9. Sistem kelistrikan sepeda motor Honda…..……… 20
2.10.Sistem pemanasan mesin sepeda motor….……….. 22
BAB III. RANCANGAN PENELITIAN 3.1. Proses kerja sistem………….………. 23
3.2. Perancangan rangkaian komunikasi serial.……….. 24
3.3. Perancangan rangkaian pengendali alarm……… 25
3.3.1 Rangkaian pengendali alarm menggunakan sensor kunci kontak………...……… 26
3.3.2 Rangkaian pengendali alarm menggunakan sensor AMN12111………. 28
3.3.3 Perancangan rangkaian sirine klakson……… 29
3.4. Perancangan regulator tegangan IC7805.……… 29
3.5. Perancangan Keypad 4x4….………... 30
3.6. Sistem Minimum Mikrokontroler AtMega8535……….. 31
3.7. Perancangan perangkat lunak……….………. 34
3.7.1. Program Pengecekan SMS……….……….. 35
3.7.2. Program Keypad……….………. 35
3.7.3. Program pengontrolan sepeda motor………... 36
3.7.4. Program pelacakan lokasi mobile phone………. 37
xiii
4.1.1. Mobile Phone Server ... 41
4.1.2. Komunikasi Serial ... 43
4.1.3. Rangkaian Pengendali Mesin Motor ... 45
4.1.4. Rangkaian Pengendali Alarm ... 46
4.2. Hasil Data Pengujian dan Pembahasan ... 48
4.2.1. Pengujian SMS Pengendalian Sepeda Motor ... 48
4.2.2. Pengujian SMS Keamanan Sepeda Motor ... 49
4.2.3. Pengujian Pelacakan Lokasi Sepeda Motor ... 50
4.2.4. Pengujian Mode Normal Via Keypad ... 51
4.2.5. Pengujian Rangkaian Pengendalian Sepeda Motor ... 52
4.2.6. Pengujian Jarak Jangkauan Sensor PIR ... 52
4.3. Analisa dan Pembahasan Perangkat Lunak ... 53
4.3.1. Pengendalian Mesin Motor Via SMS ... 54
4.3.2. Keamanan Sepeda Motor Via SMS ... 56
4.3.3. Pengaturan Mode Normal Via Keypad ... 56
4.4. Analisa Keberhasilan Alat ... 60
BAB V. PENUTUP 5.1. Kesimpulan………...61
5.2. Saran………....61
xiv
Halaman
Gambar 2.1. Pin Bus Nokia 3330………. ... 6
Gambar 2.2. Konfigurasi Pin Mikrokontroler AtMega8535...……….. 11
Gambar 2.3. IC Serial Max232………..………… ... 14
Gambar 2.4. Metode Basic Positioning Cell Identification………… ... 17
Gambar 2.5. Hardware AMN12111……… ... 18
Gambar 2.6. Konfigurasi transistor sebagai saklar… ... 19
Gambar 2.7. Keypad 4x4………. ... 20
Gambar 2.8. Rangkaian Sistem Stater Sepeda Motor…….………… ... 21
Gambar 3.1. Diagram blok sistem keamanan dan pengendalian sepeda motor ... 24
Gambar 3.2. Rangkaian ICMAX232 dengan mikrokontroler dan mobile phone ... 25
Gambar 3.3. Sistem kelistrikan alarm kunci kontak sepeda motor………. 26
Gambar 3.4. Rangkaian pengendali alarm sensor kunci kontak………... 27
Gambar 3.5. Rangkaian sensor AMN12111………. ... 29
Gambar 3.6.Rangkaian sirine klakson………. ... 29
Gambar 3.7.Rangkaian regulator tegangan 5V………...…. 30
Gambar 3.8.Konfigurasi Keypad 4x4………... ... 30
Gambar 3.9.Rangkaian osilator AtMega8535………... ... 32
Gambar 3.10. Rangkaian reset AtMega8535……….…... ... 32
Gambar 3.11. Rangkaian sistem minimum AtMega8535……… ... 33
Gambar 3.12. Diagram alir utama……… ... 34
Gambar 3.13. Diagram alir subroutine pengecekan SMS……….. ... 35
Gambar 3.14. Diagram alir subroutine mode keypad………..… ... 36
Gambar 3.15. Diagram alir subroutine pengontrolan sepeda motor… ... 37
Gambar 3.16. Diagram alir subroutine pelacakan sepeda motor…..………….. 38
Gambar 3.17. Diagram alir subroutine sistem alarm………..………… 39
xv
Gambar 4.4. Rangkaian Pengendali CDI ... ... 45
Gambar 4.5. Rangkaian Pengendali Mesin Sepeda Motor... ... 46
Gambar 4.6. Sensor PIR ... ... 46
Gambar 4.7. Rangkaian Sensor Kunci Kontak ... 47
Gambar 4.8. Rangkaian Sirine Klakson ... ... 47
xvi
Halaman
Tabel 2.1. Spesifikasi Mobile Phone Nokia 3330 ... 5
Tabel 2.2. Protokol Data Unit SMS ... 9
Tabel 2.3. Panduan Warna Kabel Sepeda Motor Merk Honda ... 22
Tabel 3.1. Konfigurasi pin ICMAX232 dengan Mobile Phone dan Mikrokontroler……… ... 25
Tabel 3.2. Kombinasi Keypad 4x4………. . 31
Tabel 3.3. Penggunaan port-port pada Mikrokontroler……… ... 33
Tabel 4.1. Karakter SMS Pengendalian Sepeda Motor……….. . 41
Tabel 4.2. Hasil Pengujian Komunikasi Serial Antara Mikrokontroler AtMega8535 dan Komputer………... .. 41
Tabel 4.3. Hasil Pengujian Komunikasi Serial Antara Mikrokontroler AtMega8535 dan Mikrokontroler AtMega8535 ... .. 42
Tabel 4.4. Hasil Data Pengamatan Komunikasi Serial RS232……… 44
Tabel 4.5. Hasil Pengukuran Tegangan Driver Mobile Phone... . 45
Tabel 4.6. Data Pengujian Perintah Pengendalian Mesin Sepeda Motor via SMS ……...……… ... 48
Tabel 4.7. Data Pengujian Pengiriman SMS Keamanan …..………. . 49
Tabel 4.8. Data Pengujian Sensor PIR dan Kunci Kontak ...……… .. 49
Tabel 4.9. Data Pengujian Lokasi Sepeda Motor ..………. 50
Tabel 4.10.Data Hasil Pengujian Password via Keypad ………. 51
Tabel 4.11.Data Hasil Pengujian Rangkaian Pengendali Mesin Sepeda Motor ...……… .... 52
Tabel 4.12.Data Hasil Pengujian Jarak Jangkauan Sensor PIR……….... 53
1
PENDAHULUAN
1.1
Latar Belakang
Salah satu sarana transportasi yang paling banyak digunakan oleh masyarakat
adalah sepeda motor. Namun, masih terlihat adanya kekurangan pada sepeda motor
mengenai masalah sistem perawatan dan keamanan sepeda motor[1].
Untuk perawatan mesin sepeda motor, sebelum dipakai sepeda motor harus
dipanaskan terlebih dahulu minimal sekali dalam sehari[1]. Hal ini membutuhkan waktu
tambahan bagi pemilik kendaraan untuk memanaskan mesin pada sepeda motor. Oleh
karena itu, sistem yang mampu memanaskan mesin motor secara otomatis akan dibuat
supaya lebih efektif.
Masalah yang lain yaitu angka perampasan atau pencurian sepeda motor belum bisa
ditekan. Setiap tahunnya angka kasus pencurian kendaraan bermotor terus meningkat.
Menurut data Polda Metro, kasus pencurian kendaraan bermotor di tahun 2006 sebesar
10.791 kasus, tahun 2007 sebesar 11.620 kasus dan tahun 2008 (Januari-Mei) adalah
sebesar 4.771 kasus. Bulan Mei menduduki angka tertinggi dalam tahun 2008 (setiap bulan
terus meningkat), yaitu sebesar 1.081 kasus[2].
Saat ini sudah banyak dijual alarm kendaraan bermotor menggunakan remote
control untuk mengendalikan sepeda motor dalam jarak tertentu. Kelemahan alat ini adalah
apabila jarak antara alat yang dikontrol dengan pengontrolnya itu melewati batas
toleransinya maka peralatan tersebut tidak dapat berfungsi sesuai dengan keinginan. Selain
itu, seseorang dengan mudah mampu melumpuhkan alarm yang saat ini sudah banyak
beredar di pasaran [2].
Sebuah sistem model baru diperlukan untuk mengontrol sepeda motor dengan
jarak jangkauan yang lebih luas. Alat yang mampu mengendalikan sistem alarm,
pemanasan mesin, dan pelacakan sepeda motor dengan menggunakan telepon selular
(mobile phone) akan dibuat pada tugas akhir ini. Pemilik kendaraan akan mengirim
informasi berupa SMS (Short Message System) ke mobile phone server yang telah
dipasang pada sepeda motor, kemudian informasi diteruskan ke mikrokontroler.
Jika terjadi pencurian sepeda motor, maka lokasi sepeda motor dapat dilacak
melalui media SMS berdasarkan lokasi BTS (Base Transceiver Station) menggunakan
layanan LBS (Location Based Service). Kelebihan pendeteksian lokasi sepeda motor
menggunakan LBS dibandingkan GPS (Global Positioning System) yaitu LBS mampu
mendeteksi lokasi sepeda motor yang berada di dalam rumah atau gedung. Jumlah BTS
Indosat mencapai 11.667 unit tersebar di sekitar 425 kabupaten/kotamadya dan 3.270
kecamatan untuk melayani 26,5 juta pelanggan seluler Indosat di Indonesia pada akhir
Maret 2008[3]. Jumlah BTS ini akan semakin meningkat sehingga semakin mempermudah
sistem pelacakan berdasarkan lokasi BTS. Kelemahan pelacakan yang menggunakan LBS
dibandingkan pada GPS yaitu layanan LBS tidak mampu menentukan koordinat posisi
benda namun hanya memberitahukan nama daerah berdasarkan lokasi BTS terdekat[4].
Masalah yang akan dibahas adalah bagaimana cara pengguna dapat mengirim
informasi via SMS sehingga mampu mengendalikan sistem yang terpasang pada sepeda
motor. Berdasarkan penelitian sebelumnya telah dikembangkan sistem pelacakan dan
pengendalian mobil jarak jauh menggunakan GPS dan data mode pada telepon selular
GSM [5]. Oleh karena itu, sistem pengendalian akan dikembangkan menggunakan mobile
phone Nokia 3330 sebagai mobile phone server, sistem pelacakan menggunakan lokasi
BTS dan sistem keamanan menggunakan sensor passive infrared.
1.2
Tujuan dan Manfaat Penelitian
Penelitian ini memiliki tujuan yaitu menghasilkan sistem keamanan dan
pengendalian sepeda motor Supra Fit sesuai jarak jangkauan operator selular
menggunakan mobile phone Nokia 3330. Sistem keamanan meliputi alarm ketika ada
orang yang bergerak di dekat sepeda motor dan pelacakan sepeda motor dengan layanan
LBS. Sistem pengendalian meliputi pemanasan dan ON-OFF mesin motor.
Manfaat dari penelitian ini untuk memberikan kenyamanan dan rasa aman bagi
pengguna sepeda motor.
1.3
Batasan Masalah
a. Mikrokontroler menggunakan keluarga AVR AtMega 8535 dan diprogram
menggunakan bahasa pemrograman C.
b. Mobile station menggunakan mobile phone Nokia 3330 dan SIM (Subscriber
Identity Module) card INDOSAT IM3.
c. Pengendalian sistem oleh user melalui SMS (Short Message Service). d. Sistem diaplikasikan pada sepeda motor Honda Supra Fit.
e. Sistem alarm menggunakan sensor kunci kontak dan sensor AMN12111.
f. Tidak dibahas hardware ponsel yang digunakan.
g. Tidak dibahas sistem ASP (Aplication Service Provider) jaringan GSM yang tersedia.
1.4
Metodologi Penelitian
Untuk dapat merealisasikan penelitian maka digunakan metode sebagai
berikut :
1. Mencari sumber informasi/ literatur
Studi kepustakaan yang mencakup literatur-literatur mengenai
Protokol Data Unit (PDU) Nokia 3330 , data sheet AtMega 8535, sensor
kunci kontak dan sensor AMN12111.
2. Perancangan dan pembuatan alarm motor menggunakan sensor kunci kontak
dan sensor AMN12111.
Tahap ini meliputi perhitungan teoritis, perancangan sistem kerja
sensor dan pembuatan rangkaian pada PCB sesuai dengan hasil perancangan.
Hasil perhitungan teoritis sistem sensor digunakan untuk mengetahui
spesifikasi secara detil dalam merancang alarm motor.
3. Perancangan dan pembuatan sistem pengiriman SMS dengan AtMega8535.
Tahap ini meliputi pembuatan software dan hardware. Perancangan
sistem minimum mikrokontroler AtMega8535 sebagai hardware dilakukan
terlebih dahulu. Selanjutnya, tahap pembuatan program pengiriman SMS
menggunakan bahasa pemrograman C. Setelah itu, program akan di download
4. Pengujian sistem alarm dan kendali motor menggunakan mobile phone
sebelum diinstalasi.
Komunikasi dari kedua perangkat keras yaitu mobile phone dan
mikrokontroler akan diuji dengan melakukan pengiriman informasi dari
mobile phone berupa SMS ke mikrokontroler. Mikrokontroler diharapkan
mampu menjalankan komunikasi sistem secara keseluruhan yaitu meliputi
pemanasan mesin, alarm dan pelacakan sepeda motor. Data yang diperoleh
sebelum instalasi akan dibahas dan dibandingkan dengan data yang diperoleh
setelah instalasi.
5. Instalasi sistem alarm dan kendali pada sepeda motor.
Pada tahap ini dilakukan modifikasi sistem kelistrikan pada sepeda
motor Honda Supra Fit yaitu berupa pemasangan sensor dan perangkat keras
sistem kendali menggunakan mobile phone.
6. Pengujian alat dan analisa sistem pada sepeda motor setelah diinstalasi.
Pengujian program mikrokontroler, mobile phone, dan kendali pada
sepeda motor bertujuan untuk mengetahui apakah sistem yang telah
direalisasikan dapat bekerja sesuai dengan spesifikasi perencanaan yang telah
ditetapkan. Selain itu, juga dilakukan pengambilan data berupa kesesuaian
perintah SMS terhadap pengendalian mesin motor, keamanan sepeda motor,
lokasi mobile phone server, dan jarak jangkauan sensor PIR. Jika sistem
bekerja dengan baik, maka sistem ini tidak dipengaruhi oleh intervensi mesin
5
DASAR TEORI
2.1
Mobile phone Nokia 3330[6]
Mobile phone Nokia 3330 menggunakan operating band GSM (900,1800)/CSD
dengan antena internal. Waktu siaga sampai 260 jam dan waktu bicara sampai 270 menit.
Berbagai fasilitas yang lain yaitu T9, smart messaging, kalkulator, voice dial, mobile chat
mode for SMS, currency converter, message templates, Phonebook 100 , 20 dialed, 10
received, 10 missed calls, dynamic font size, softkey, screensaver, dan welcome message.
Spesifikasi lengkap mobile phone Nokia 3330 seperti pada Tabel 2.1[6].
Tabel 2.1. Spesifikasi Telepon Selular Nokia 3330[6]
Body
Dimensi 113 x 48 x 22mm Berat 113g
User Interface
Keypad Alpha Numeric (0-9)
Fungsi
Messaging SupPort SMS
Memori dan Baterai
External memory Tidak Baterai Li-Ion Software
Operating System Vgh
Browser WAP v.1.x
2.1.1 Komunikasi Serial Mobile phone Nokia 3330
Mobile phone Nokia 3330 menggunakan kabel data generic supaya bisa
dikoneksikan secara serial dengan sistem koneksi F-Bus dan M-bus. Sistem koneksi ini
digunakan untuk menghubungkan mobile phone dengan komputer atau mikrokontroler.
Gambar 2.1 adalah mobile phone populer keluaran Nokia dengan tipe Nokia 3310/
3315/3330 yang memiliki F/M Bus terdiri dari 4 pad terletak dibawah tempay battery.
Biasanya sudah terdapat rangkaian untuk mengubah level tegangan 3V oleh IC Max232
Gambar 2.1. PIN Bus Nokia 3330[6]
Komunikasi serial M-Bus dan F-Bus memiliki perbedaan proses pengiriman dan
penerimaan data yang terdapat pada mobile phone yaitu sebagai berikut :
a. Komunikasi M-Bus
M-Bus memiliki satu pin bi-directional untuk digunakan sebagai transceiver dan
receiver. Komunikasi M-Bus merupakan komunikasi half-duplex yang memiliki kecepatan
transfer data sebesar 9600bps dengan 8 bit data, odd parity, dan satu stop bit. Pin data
terminal ready (DTR) biasanya tidak diaktifkan sedangkan request to send (RTS) harus
diaktifkan. Hanya ada 2 pin yang digunakan pada komunikasi ini yaitu pin ground dan
pin data.
b. Komunikasi F-Bus
F-Bus merupakan komunikasi high-speed full-duplex bus yang sangat sesuai untuk
digunakan sebagai komunikasi serial standar. Komunikasi ini menggunakan tiga buah pin
yaitu satu pin data sebagai transceiver (TX) , satu pin sebagai receiver (RX), dan satu pin
sebagai ground. Selain itu, F-Bus memiliki kecepatan data sebesar 115.200bps, 8 bit data,
no parity, dan satu stop bit. Jika menggunakan komunikasi F-Bus maka pin data terminal
ready (DTR) harus diaktifkan dan pin request to send (RTS) tidak diaktifkan .
2.1.2 Protokol F-Bus
F-Bus merupakan jalur bi-directional serial yang bekerja dengan kecepatan data
sebesar 115.200bps, no parity, dan 8 data bit. Untuk menggunakan jalur F-Bus maka pin
DTR dihubungkan dengan level tegangan antara +3V s.d +12V sedangkan pin RTS antara
-3V s.d -12V. Proses pengiriman dan penerimaan data melalui jalur F-Bus membutuhkan
sinkronisasi UART (Universal Asyncronous Receiver/ Transmitter ) dengan komputer atau
mikrokontroler. Keberhasilan proses komunikasi ditandai oleh pengiriman string 0x55 atau
'U' sebanyak 128 kali sehingga mobile phone siap untuk melakukan pengiriman frame
melakukan panggilan, mengirim dan menerima pesan SMS. Semua informasi yang akan
dikirim dituliskan dalam bentuk pasangan-pasangan bilangan heksadesimal yang disebut
pasangan octet. Penjelasan mengenai nilai data pasangan octet yang terdapat pada
masing-masing byte adalah sebagai berikut :
a. Byte 0
Pengiriman frame akan selalu diawali dengan pengiriman karakter yang merupakan
Frame ID dari F-Bus. Jika menggunakan kabel maka karakter yang dikirim 0x1E
sedangkan jika menggunakan infrared yang dikirim yaitu 0x1C.
b. Byte 1
Untuk pengiriman melalui mobile phone selalu digunakan karakter 00 yang
merupakan alamat tujuan saat pengiriman data.
c. Byte 2
Karakter alamat sumber saat mengirim data diisi dengan karakter 0x0C dari
terminal.
d. Byte 3
Pemberian perintah atau pesan yang diinginkan oleh pengguna. Misalkan untuk
mendapatkan versi software dan hardware maka karakter yang dikirim yaitu 0xD1.
e. Byte 4 dan 5
Pasangan octet byte 4 dan 5 berfungsi menentukan panjang pesan. MSB (Most
Significant Bit) terletak di byte 4 dan LSB (Least Significant Bit) terletak di byte 5.
f. Byte 6 s.d 12
Segment data dimulai dari byte 6 sampai byte 12. Byte terakhir pada data segment
(byte 12) adalah nomor urutan pengiriman data yang ditambahkan dari 0 sampai 7
pada setiap pengiriman frame.
g. Bytes 14 dan 15
Pengecekan data dilakukan dengan XORing. Byte 14 merupakan lokasi hasil pengecekan byte ganjil dan byte 15 merupakan lokasi hasil pengecekan byte genap.
Contoh data pengiriman frame dalam bentuk heksadesimal yang digunakan untuk
mendapatkan versi software dari mobile phone Nokia adalah sebagai berikut :
Byte: 00 01 02 03 04 05 06 07 08 09 10 11 12 13 14 15
Data: 1E 00 0C D1 00 07 00 01 00 03 00 01 60 00 72 D5
Short Message Service (SMS) merupakan salah satu fitur berupa pesan pendek
yang disediakan dalam komunikasi seluler . Layanan SMS distandarisasi oleh suatu badan
yang bernama European Telecomunication Standards Institute (ETSI). Layanan SMS ini
memungkinkan perangkat mobile phone mengirim dan menerima pesan-pesan teks dengan
panjang sampai dengan 160 karakter melalui jaringan GSM.
Untuk mengirim sebuah SMS melalui komunikasi F-Bus, maka isi SMS harus
dikonversi menjadi pasangan 8 bit (octet). Proses konversi isi SMS terdiri dari dua langkah
sebagai berikut :
a. Mengkonversi isi SMS menjadi kode 7 bit.
b. Mengkonversi kode 7 bit (septet) menjadi 8 bit (octet) yang mewakili pasangan
hexadecimal. Jika jumlah bit pada setiap baris septet kurang dari 8, maka
kekurangannya diambil dari bit paling kanan pada septet selanjutnya dan digabungkan
pada bagian kiri.
Contoh konversi isi SMS ‘hello’ adalah sebagai berikut :
Isi SMS (ASCII) : h e l l o
Konversi menjadi heksadesimal : 68 65 6C 6C 6F
Konversi menjadi biner : 1101000 1100101 1101100 1101100 1101111
Membalik nilai byte desimal : 1101111 1101100 1101100 1100101 1101000
Konversi 8 bit (octet) : 110 11111101 10011011 00110010 11101000
Bentuk heksadesimal : 06 FD 9B 32 E8
Jadi, hasil konversi kata ‘hello’ adalah E8 32 9B FD 06.
2.1.4 Mode Protokol Data Unit (PDU)
PDU (Protocol Data Unit) adalah protokol data dalam suatu SMS berupa
pasangan-pasangan karakter ASCII yang mencerminkan representasi angka heksadesimal
dari informasi yang ada dalam suatu SMS, misalnya nomor pengirim, nomor tujuan, waktu
pengiriman dan isi pesan SMS. PDU ini harus dipahami sebelum
mengimplementasikannya ke dalam program di komputer/mikrokontroler. PDU SMS
terdiri dari dua tipe, yaitu PDU SMS-Submit (SMS Pengiriman) dan PDU SMS-Deliver
(SMS Penerimaan). PDU SMS untuk komunikasi F-Bus terdiri atas 8 header seperti pada
Tabel 2.2.
1. F-Bus Frame Header 0 F-Bus Frame ID
1 Alamat tujuan
2 Alamat Sumber
3 Tipe perintah (Tipe SMS = 0x02)
4-5 Panjang pesan
2. Short Message Service 6-8 Memulai SMS Frame Header yaitu 0x00, 0x01,
dan 0x00
9-11 Bilangan heksa pengiriman sms yaitu 0x01, 0x02,
dan 0x00. Bilangan heksa penerimaan sms yaitu
0x10,0x02, dan 0x10
3. SMSC (12byte) 12 Panjang SMS Centre
13 Kode SMSC untuk nasional yaitu 0x81 dan
internasional yaitu 0x91
14-23 Nomor SMS Centre
4. Transfer Protocol Data
Unit (TPDU)
24 Tipe SMS
25 Jangka waktu pengiriman SMS
26 TP Protocol Identifier (TP-PID)
27 TP Data Coding Scheme (TP-DCS)
28 Ukuran pesan SMS
5. Nomor Tujuan (12 Bytes) 29 Panjang nomor tujuan
30 Kode nomor tujuan untuk nasional 0x81
31-40 Pasangan octet dari nomor tujuan.
6. Validity Period (VP) 41 Kode Validity Period
42-47 Service Centre Time Stamp
7. Pesan SMS 48-92 Isi pesan SMS
93 Selalu diisi dengan pasangan octet 0x00
8. F-Bus Ending 94 Nomor urutan paket data
95 Lapisan byte
96-97 Pengecekan byte genap dan ganjil.
Contoh pengiriman frame header sebanyak 98 byte adalah sebagai berikut :
Byte: 00 01 02 03 04 05 06 07 08 09 10 11 12 13 14 15 16 17 18 19 20 21 22 23
Data: 1E 00 0C 02 00 59 00 01 00 01 02 00 07 91 16 14 91 09 10 F0 00 00 00 00
Byte: 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47
Byte: 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71
Data: C8 34 28 C8 66 BB 40 54 74 7A 0E 6A 97 E7 F3 F0 B9 0C BA 87 E7 A0 79 D9
Byte: 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93
Data: 4D 07 D1 D1 F2 77 FD 8C 06 19 5B C2 FA DC 05 1A BE DF EC 50 08 01
Byte: 94 95 96 97
Data: 43 00 7A 52
2.2
Mikrokontroler AVR Atmega8535[7]
AVR (Alf and Vegard’s Risc Prosessor) merupakan seri mikrokontroler CMOS
8-bit yang diproduksi oleh Atmel berbasis arsitektur RISC (Reduced Instruction Set
Computer). Chip AVR yang digunakan untuk tugas akhir ini adalah Atmega8535. Hampir
semua instruksi dieksekusi dalam satu siklus clock dan mempunyai 32 register
general-purpose, timer/counter fleksibel dengan mode compare, interupt internal dan eksternal,
serial UART, programmable Watchdog Timer, dan mode power saving. Beberapa
diantaranya mempunyai ADC dan PWM internal. AVR juga mempunyai In-System
Programmable Flash on-chip yang mengijinkan memori program untuk diprogram ulang
dalam sistem yang menggunakan hubungan serial SPI.
2.2.1 Arsitektur AVR Atmega8535
Mikrokontroler Atmega8535 memiliki arsitektur sebagai berikut :
a. Saluran IO sebanyak 32 buah, yaitu Port A, Port B, Port C dan Port D.
b. ADC 10 bit sebanyak 8 Channel.
c. Tiga buah timer / counter yaitu Timer 0, Timer 1, Timer 2.
d. Watchdog Timerdengan osilator internal.
e. Memori Flash sebesar 8 kb.
f. Sumber Interrupt internal dan eksternal.
g. Komparator analog
h. Port USART (Universal Shynchronous Ashynchronous Receiver Transmitter)
2.2.2 Deskripsi Mikrokontroler Atmega8535
Konfigurasi Pin Mikrokontroller ATmega8535 dengan kemasan 40-pin DIP (dual
paralelisme, AVR menggunakan arsitektur Harvard (dengan memori dan bus terpisah
untuk program dan data). Ketika sebuah instruksi sedang dikerjakan maka instruksi
berikutnya diambil dari memori program.
Gambar 2.2. Konfigurasi Pin Mikrokontroller ATmega8535[8]
Mikrokontroler Atmega 8535 memiliki konfigurasi Pin sebagai berikut :
a. VCC (5V)
b. GND (Ground)
c. Port A (PA7 - PA0)
d. Port B (PB7 - PB0)
e. Port C (PC7 - PC0)
f. Port D (PD7 - PD0)
g. RESET (Reset input)
h. AVCC adalah pin penyedia tegangan untuk Port A dan A/D Konverter
i. AREF adalah pin referensi analog untuk A/D konverter.
Port A berfungsi sebagai input analog pada A/D Konverter dan port I/O 8-bit dua
arah. Port B, Port C, Port D adalah suatu port I/O 8-bit dua arah dengan resistor internal
pull-up (yang dipilih untuk beberapa bit). Pada rangkaian RESET, waktu pengosongan
kapasitor dapat dihitung dengan persamaan sebagai berikut :
T = R x C (2.1)
AVR arsitektur mempunyai dua ruang memori utama, yaitu Ruang Data Memori
dan Ruang Program Memori. Atmega8535 memiliki fitur EEPROM Memori untuk
penyimpanan data. Semua ruang memori adalah reguler dan linier.
2.2.3.1 Program Memori
Atmega8535 berisi 8Kbyte On-Chip di dalam sistem Memori flash
reprogrammable untuk penyimpanan program. Untuk keamanan perangkat lunak, Flash
ruang program memori dibagi menjadi dua bagian, yaitu bagian boot program dan bagian
aplikasi program. Flash Memori mempunyai suatu daya tahan sedikitnya 10.000
write/erase Cycles. Atmega8535 Program Counter (PC) terdiri dari 12 bit lebar dan
mempunyai kapasitas lokasi program memori sebesar 4Kbyte.
2.2.3.2 Data Memori
Lokasi alamat data memori sebanyak 608 menunjukkan register file, I/O memori,
dan internal data SRAM. Register file dan memori I/O memiliki 96 lokasi alamat data.
Alamat internal data SRAM memiliki 512 alamat data.
2.2.4 Timer/Counter
Mikrokontroler ini menyediakan fasilitas pewaktuan yang diberi nama
Timer/Counter sebanyak tiga buah, yaitu Timer/Counter 0 dan 2 yang terdiri dari 8 bit dan
Timer/Counter 1 yang terdiri dari 16 bit. Register yang digunakan oleh Timer/Counter
adalah TCNTn sebagai register penyimpan nilai dari Timer/Counter. Regiater OCRn
(Output Compare Register) merupakan register pembanding, jika nilai OCRn sama dengan
TCNTn maka terjadi Compare Match. Pengaturan Timer/Counter 0, Timer/Counter 1 dan
Timer/Counter 2 dilakukan melalui register TCCRn(Timer/Counter Control Register).
(Waveform Generation Mode) berfungsi untuk mengendalikan kenaikan dari pencacah
pada register TCNTn, menentukan sumber dari nilai maksimal (top) dari pencacah dan tipe
timer yang akan digunakan.
Pada mode CTC cacahan selalu meningkat dan ketika mencapai nilai maksimum
akan kembali ke nol lagi sehingga dapat digunakan sebagai pewaktu presisi. Cara kerja
dari mode ini yaitu akan membandingkan antara OCRn sama dengan TCNTn, jika sama
maka pencacahan timer dimulai dari awal lagi. Persamaan perhitungan waktu selama 1
OCR1 =
escaler NilaiPr
cpu Frekuensi
(2.2)
Keterangan : fcpu = Kristal yang digunakan (Hz).
Prescaler = Pembagi waktu presisi.
OCR1 = Register pembanding pada Timer1.
2.3
IC MAX232
Komunikasi antara mobile phone dengan sistem minimum membutuhkan IC
MAX232 sebagai pengubah level tegangan karena adanya perbedaan level tegangan antara
mobile phone dengan sistem minimum. IC MAX232 mempunyai 2 receivers yang
berfungsi sebagai pengubah level tegangan dari level RS232 ke level Transistor Transistor
Logic (TTL) dan mempunyai 2 drivers yang berfungsi mengubah level tegangan dari level
TTL ke level RS232[9].
Karakteristik dari RS-232 memiliki ketentuan level tegangan sebagai berikut :
a. Level tegangan antara -3 Volt (-3V) hingga -25 Volt (-25V) untuk logika ‘1’
disebut ‘mark’ .
b. Level tegangan antara +3V hingga +25V untuk logika ‘0’ disebut ‘space’.
c. Level tegangan antara -3V hingga +3V adalah invalid level, yaitu level tegangan
yang tidak memiliki level logika pasti sehingga harus dihindari. Level tegangan
lebih negatif dari -25V atau lebih positif dari +25V juga harus dihindari karena
tegangan tersebut dapat merusak line driver pada saluran RS-232.
Pada konektor mobile phone tidak semua pin terhubung ke mikrokontroler, tetapi
hanya pin nomor 2(ground), 3 (Rx/data in), dan 4(Tx/data out). Konfigurasi pin dari IC
MAX232 dapat dilihat pada Gambar 2.3.
Gambar 2.3. IC Serial MAX232[9]
Global System for Mobile Communication (GSM) adalah sebuah teknologi
komunikasi selular yang bersifat digital. Teknologi ini memanfaatkan gelombang mikro
dan pengiriman sinyal yang dibagi berdasarkan waktu, sehingga sinyal informasi yang
dikirim akan sampai pada tujuan. GSM sebagai sistem telekomunikasi selular digital
memiliki keunggulan yang jauh lebih banyak dibanding sistem analog, di antaranya
kapasitas sistem lebih besar karena menggunakan teknologi digital dimana penggunaan
sebuah kanal tidak hanya diperuntukkan bagi satu pengguna saja sehingga saat pengguna
tidak mengirimkan informasi, kanal dapat digunakan oleh pengguna lain. Selain itu,
sifatnya yang sebagai standar internasional memungkinkan international roaming.
Teknologi digital tidak hanya mengantarkan suara, tetapi memungkinkan servis lain seperti
teks, gambar, dan video. Arsitektur jaringan GSM terdiri dari mobile station, base station
system, network sub system, operation and support system[10].
2.4.1 Mobile Station (MS)
Mobile station merupakan perangkat yang digunakan oleh pelanggan untuk
melakukan pembicaraan yang terdiri atas :
a. Mobile Equipment (ME) atau mobile phone, merupakan perangkat GSM yang
berada di sisi pengguna atau pelanggan yang berfungsi sebagai terminal transceiver
(pengirim) dan receiver (penerima) sinyal untuk berkomunikasi dengan perangkat
GSM lainnya.
b. Subscriber Identity Module (SIM) atau SIM Card, merupakan kartu yang berisi
seluruh informasi pelanggan dan beberapa informasi pelayanan. Data yang
disimpan dalam SIM secara umum, adalah:
1. IMSI (International Mobile Subscriber Identity), merupakan penomoran
pelanggan.
2. MSISDN (Mobile Subscriber ISDN), nomor yang merupakan nomor panggil
pelanggan.
2.4.2 Base Station System (BSS)
Base station system terdiri atas:
a. BTS (Base Transceiver Station), perangkat GSM yang berhubungan langsung
b. BSC (Base Station Controller), perangkat yang mengontrol kerja BTS-BTS yang
berada di bawahnya dan sebagai penghubung BTS dan MSC.
2.4.3 Network Sub System (NSS)
Network Sub System atau NSS terdiri atas:
a. Mobile Switching Center atau MSC
b. Home Location Register atau HLR
c. Visitor Location Register atau VLR
d. Authentication Center atau AuC
e. Equipment Identity Registration atau EIR
2.4.4 Operation and SupPort System ( OSS)
Operation and SupPort System atau OSS merupakan sub sistem jaringan GSM
yang berfungsi sebagai pusat pengendalian, diantaranya fault management, configuration
management, performance management, dan inventory management.
2.5 Location Based Service (LBS)
[11]
Location Based Service merupakan suatu layanan yang bereaksi aktif terhadap
perubahan entitas posisi sehingga mampu mendeteksi letak objek dan memberikan layanan
sesuai dengan letak objek yang telah diketahui tersebut. Layanan ini masih menggunakan
SMS dalam pertukaran informasinya yang dikembangkan oleh operator seluler dengan
memberikan keakuratan, kemudahan dan kecepatan dalam penyampaikan informasi.
Pada teknologi LBS berbasis jaringan seluler, penentuan posisi sebuah peralatan
komunikasi bergerak ditentukan berdasarkan posisi relatif peralatan tersebut terhadap
lokasi BTS (Base Transceiver Station). Dalam menentukan posisi dari sebuah mobile
phone yang sedang aktif, secara umum terdapat tiga tingkat metode yang digunakan saat
ini, yaitu :
a. Metode Basic Positioning Cell Identification (Cell ID)
Penentuan posisi didasarkan pada daerah geografis yang tercakup oleh sebuah cell
yang berhubungan dengan daerah cakupan dari sinyal radio. Ketika sebuah mobile phone
terhubung secara aktif dengan sebuah base station, berarti mobile phone tersebut
kombinasi metode basic positioning cell identification.Untuk mengukur jarak dan arah
mobile phone dari base station tidak dapat diketahui dengan pasti.
Oleh karena itu, untuk lebih meningkatkan lagi akurasi hasil pencarian, metode
Cell ID ini seringkali dikombinasikan dengan metode lain sebagai berikut :
1. Timing Advanced (TA), dengan menggunakan TA, metode Cell ID akan
ditambahkan sebuah fungsionalitas untuk menghitung Round Trip Time (RTT),
yaitu waktu transmisi sebuah frame (dari base station ke mobile phone) dan waktu
penerimaan sebuah frame (dari mobile phone ke base station). Adanya tambahan
metode ini, maka jarak antara mobile phone dan base station dapat ditentukan
dengan keakuratan 50 m.
2. Network Measurement Report (NMR), dengan berdasarkan kekuatan sinyal
(Received Signal Strength) yang diterima mobile phone yang ada di suatu “sector
cell”, maka posisi itu dapat ditentukan lebih akurat.
Gambar 2.4. Metode Basic Positioning Cell Identification (Cell ID)[11]
b. Metode Enhanced Positioning
Metode Enhanced Positioning menggunakan pendekatan Observe Time Difference
(OTD). Jaringan GSM yang sering digunakan adalah Enhanced-OTD (E-OTD) yaitu
metode pencarian posisi yang berdasarkan pada waktu. Untuk menentukan posisi relatif
sebuah mobile phone harus aktif terhadap tiga base station dan perlu ditentukan terlebih
dahulu jarak mobile phone terhadap masing-masing base station berdasarkan waktu yang
Selanjutnya, dengan menggunakan rumus matematika untuk triangulasi, maka dapat
ditentukan posisi dari mobile phone yang sedang aktif tersebut. Metode akan meningkatkan
akurasi hingga memiliki ketelitian sampai kurang dari 50m.
c. Metode Advanced Positioning
Metode Advanced Positioning menggunakan teknologi Assisted-Global Positioning
System (A-GPS). A-GPS juga merupakan metode yang berbasis pada waktu. Metode ini
melakukan pengukuran waktu tiba dari sebuah sinyal yang dikirim dari tiga buah satelit
GPS. Hal ini berarti mobile phone harus memiliki fasilitas untuk mengakses GPS. A-GPS
juga menghasilkan akurasi secara vertikal dan estimasi jarak yang baik yaitu kurang dari
10m.
2.6
Passive Infra Red (PIR) AMN12111
Sensor AMN12111 adalah sensor PIR (Passive Infrared) terkecil di dunia yang
telah dilengkapi dengan lensa fresnel serta mempunyai output digital. Sensor PIR ini
bekerja dengan menangkap energi panas yang dihasilkan dari pancaran sinar inframerah
pasif yang dimiliki setiap benda dengan suhu benda diatas nol mutlak. Beberapa makhluk
hidup seperti anjing, kucing, dan manusia memiliki suhu kira-kira 32 derajat celcius serta
merupakan suhu panas yang khas pada lingkungan. Hal inilah yang membuat sensor PIR
mampu mendeteksi perubahan radiasi inframerah ketika ada pergerakan manusia yang
memiliki suhu yang berbeda dengan lingkungannya[12].
Sensor AMN12111 merupakan sensor yang diproduksi oleh Panasonic dan
memiliki jangkauan deteksi maksimal 2 meter. Keluaran dari sensor ini sudah dalam
bentuk digital yaitu akan berlogika high jika ada gerakan manusia yang terdeteksi dan
berlogika low jika tidak ada gerakan dari manusia.
Sensor AMN12111 memiliki tiga buah pin yaitu Vdd, Gnd, dan Output seperti
yang ditunjukkan oleh Gambar 2.5. Sensor AMN12111 bekerja pada tegangan Vdd sebesar
5V dan akan menghasilkan nilai tegangan output sebesar 4.5V ketika mendeteksi gerakan
manusia.
Sensor AMN12111 memiliki kelebihan sebagai berikut :
a. Sensor dengan ukuran kecil yang mampu mendeteksi pergerakan manusia.
b. Memiliki amplifier sehingga keluaran sensor lebih mudah dibaca.
c. Tidak terpengaruh oleh gangguan peralatan elektronis lainnya.
Gambar 2.5. Hardware pada AMN12111[12]
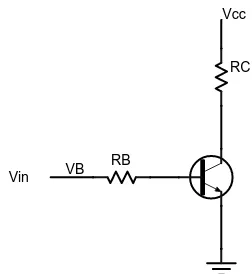
2.7
Transistor sebagai saklar[13]
Untuk dapat menggunakan transistor sebagai saklar maka transistor dikonfigurasi
sehingga bekerja di daerah cut-off dan saturasi. Perubahan ini dapat digunakan untuk
mengaktifkan relay atau sebagai masukan bagi mikrokontroler. Transistor yang berada
dalam keadaan saturasi seperti sebuah saklar yang tertutup sedangkan transistor saat cutoff
seperti sebuah saklar yang terbuka. Perhitungan besarnya arus basis pada konfigurasi
Gambar 2.6 adalah sebagai berikut :
B BE BB B
R V V
I = − (2.3)
Beta DC
( )
β sebuah transistor merupakan rasio arus kolektor DC dengan arus basis DC,dapat dihitung dengan persamaan berikut :
B C
I I =
β (2.4)
Sehingga diperoleh juga persamaan untuk IBmin sebagai berikut :
β
Csat B
I I min =
(2.5)
Arus IC saturasi (ICsat)dapat diperoleh pada saat nilai VCE = 0, sehingga besarnya arus Ic
saturasi dapat diperoleh dengan persamaan sebagai berikut :
Rc Vcc ICsat =
RB
RC Vcc
Vin VB
Gambar 2.6 Konfigurasi transistor sebagai saklar
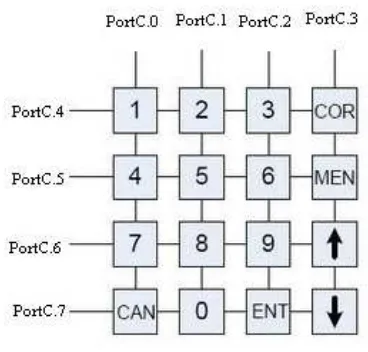
2.8 Keypad 4x4
Keypad 4x4 memiliki konfigurasi tombol-tombol yang tersusun secara matrik 4x4
sehingga hanya dibutuhkan 4 pin masukan dan 4 pin keluaran dengan 16 variasi keadaan.
Antarmuka keypad 4x4 pada program dilakukan dengan sistem scanning. Gambar 2.7
menunjukkan skema data keypad dari baris dan kolom yang akan diproses oleh
mikrokontroler[8].
Gambar 2.7. Keypad 4x4[8]
2.9
Sistem Kelistrikan Sepeda Motor Honda[14]
Sistem kelistrikan pada sepeda motor Honda terdiri dari : a. Sistem pengisian
Aki 12V pada sepeda motor digunakan untuk menjalankan motor starter (starter
elektrik), klakson, lampu, dan komponen kontrol lainnya. Aki membutuhkan sumber arus
supaya arus yang dihasilkan tetap (stabil). Sekring digunakan untuk menghindari hubungan
b. Sistem pengapian
Sistem pengapian berfungsi menghasilkan listrik tegangan tinggi untuk
menghasilkan percikan bunga api pada busi. Sistem pengapian yang digunakan pada
sepeda motor keluaran terbaru menggunakan CDI(Capasitive Discharge Ignition).
Komponen-komponen dalam sistem pengisian terdiri dari kumparan pembangkit, generator
pulsa, CDI, coil pengapian (ignition coil), dan busi.
c. Sakelar, lampu, klakson, dan sistem kontrol
Sakelar digunakan sebagai penghubung arus listrik dari baterai atau sistem
pengisian menuju lampu atau peralatan lainnya yang membutuhkan arus listrik. Pusat
sakelar pada sepeda motor terletak pada kontak utama (kunci utama). Sakelar pada sepeda
motor antara lain sakelar starter, sakelar lampu sein, sakelar lampu utama, sakelar rem,
sakelar gigi transmisi, dan sakelar klakson.
Salah satu kelistrikan motor yang utama adalah sistem starter yang berfungsi
sebagai penggerak awal agar mesin bisa bekerja. Secara umum sistem starter elektrik
memiliki beberapa komponen sebagai berikut :
1. Saklar starter : berfungsi mengalirkan arus listrik ke relay starter.
2. Relay starter : berfungsi mengalirkan arus yang besar ke motor starter.
3. Motor starter : berfungsi mengubah tenaga listrik menjadi momen putar.
4. Battery : berfungsi sebagai sumber arus listrik.
Sistem kerja starter elektrik yaitu saat kunci kontak on dan saklar starter ditekan
maka arus mengalir dari baterai menuju ke relay starter. Di dalam relay starter terdapat
kumparan sehingga jika arus mengalir ke dalam kumparan relay starter maka relay starter
akan menjadi magnet, dan plunyer pada relay starter akan menghubungkan terminal kabel
besar dari positif batteray dan menuju motor starter. Motor starter yang mendapatkan
aliran arus akan berputar dan memutarkan mesin sepeda motor.
Gambar 2.8 menunjukkan rangkaian sistem starter sepeda motor. Untuk modifikasi dan instalasi kelistrikan sepeda motor dianjurkan mengetahui jenis warna kabel dari
Gambar 2.8. Rangkaian Sistem Starter Sepeda Motor[14]
Tabel 2.3. Panduan Warna Kabel Sepeda Motor Merk Honda
No Warna Kabel Keterangan
1 Hijau (-) Ground
2 Merah (+) Aki
3 Hitam (+) Kunci kontak
4 Putih (+) Alternator pengisian
(+) Lampu dekat
5 Kuning (+) Arus beban ke saklar
lampu
6 Kuning-Merah (-) Starter
7 Abu-abu (+) Flaser
8 Biru laut (+) Sein kanan
9 Oranye (+) Sein kiri
10 Coklat (+) Lampu kota
11 Hitam-Merah (+) Spul CDI
12 Hitam-Putih (+) Kunci kontak
13 Hitam-Kuning (+) Koil
14 Biru-Kuning (+) Pulser CDI
15 Hijau-Muda (+) Klakson
2.10
Sistem Pemanasan Mesin Sepeda Motor[14]
Pemanasan mesin motor memiliki beberapa manfaat yaitu dapat mencegah
terjadinya keausan pada komponen mesin, mengurangi kebocoran kompresi, dan
memberi kesempatan pada oli untuk bergerak dari panci oli dan masuk kembali ke
bagian-bagian mesin yang perlu dilumasi. Para desainer sengaja menciptakan celah yang secara
otomatis akan berkurang (menjadi presisi) ketika komponen-komponen itu terkena suhu
panas. Mesin sepeda motor disarankan supaya dipanaskan terlebih dahulu selama kurang
lebih 2 menit sebelum sepeda motor dijalankan. Pemanasan mesin sepeda motor tidak
dianjurkan terlalu lama karena akan membuat pipa knalpot menjadi kuning dan
23
PERANCANGAN PENELITIAN
3.1
Proses kerja Sistem
Sistem ini mampu mengendalikan pemanasan mesin, alarm, dan pelacakan sepeda
motor dengan menggunakan telepon selular (mobile phone). Pemilik kendaraan mengirim
SMS (Short Message Service) ke mobile phone server yang telah dipasang pada sepeda
motor, kemudian pesan diteruskan ke mikrokontroler AtMega 8535. Sistem pada mesin
motor akan bekerja sesuai dengan informasi yang dikirim hanya oleh mobile phone user.
Sistem ini memiliki fungsi dan peranan sebagai berikut :
1. Pemanasan mesin motor secara otomatis.
Sistem ini berfungsi memanaskan mesin kendaraan sebelum dipakai berjalan
tanpa harus memutar kunci kontak ke posisi ON. Jika dikirim karakter ‘MESIN
HEAT’, maka mesin motor dipanaskan selama selang waktu 2 menit.
2. Alarm kunci kontak
Sebagai antisipasi jika ada yang memutar kunci kontak selama alarm pada
kondisi ON, maka alarm akan berbunyi, mesin tidak dapat dihidupkan, dan mobile
phone server akan mengirim informasi keamanan via SMS ke mobile phone user.
3. Alarm sensor PIR AMN12111
Sensor passive infrared dapat mendeteksi adanya gerakan manusia. Alarm akan
berbunyi ketika terdeteksi adanya gerakan tangan manusia di sekitar stang sepeda
motor.
4. Sistem pelacakan lokasi sepeda motor dengan layanan LBS
Sistem pelacakan sepeda motor berfungsi untuk mengetahui lokasi sepeda
motor ketika terjadi tindakan pencurian. Pada kondisi ini, mobile phone server akan
mengirim SMS ke mobile phone user berupa lokasi sepeda motor berdasarkan lokasi
BTS terdekat.
5. Menghidupkan dan mematikan mesin sepeda motor
Jika user mengirim SMS dengan karakter ‘MESIN ON’, maka mesin motor
akan hidup. Jika user mengirim SMS dengan karakter ‘MESIN OFF’, maka mesin
6. Kunci rahasia menggunakan password
Pengendalian menggunakan SMS memiliki kelemahan yaitu tidak dapat
bekerja di daerah yang tidak terjangkau sinyal operator selular. Hal ini diantisipasi
dengan cara memasukan kode rahasia menggunakan keypad 4x4 oleh user untuk
mengaktifkan mode normal.
Diagram blok sistem keamanan dan pengendalian sepeda motor secara lebih
lengkap ditunjukkan oleh Gambar 3.1.
Gambar 3.1. Diagram Blok Sistem Keamanan dan Pengendalian Sepeda Motor
3.2 Perancangan Rangkaian Komunikasi Serial
Komunikasi antara mobile phone dengan sistem minimum membutuhkan IC
MAX232 sebagai pengubah level tegangan karena adanya perbedaan level tegangan antara
mobile phone dengan sistem minimum. IC MAX232 mempunyai 2 receivers yang
berfungsi sebagai pengubah level tegangan dari level RS232 ke level Transistor Transistor
Logic (TTL) dan mempunyai 2 driver yang berfungsi mengubah level tegangan dari level
TTL ke level RS232.
Pada konektor mobile phone tidak semua pin terhubung ke mikrokontroler, tetapi
hanya pin nomor 2(ground), 3 (Rx/data in), dan 4(Tx/data out). Untuk mengubah level
tegangan dari mobile phone ke mikrokontroler maka pin keluaran dihubungkan dengan
ICMAX232 seperti pada Tabel 3.1.
Sensor Posisi Kunci Kontak
Sensor PIR
Mikrokontroler
ATMEGA
8535
Mesin Sepeda Motor
Keypad 4x4
Klakson Sepeda Motor
Mobile Phone Nokia 3330
Tabel 3.1 Konfigurasi Pin IC Max232 dengan Mobile Phone dan Mikrokontroler
Mikrokontroler IC Max232
Tx [Pin D.1] T1 in [Pin 11]
Rx [Pin D.0] R1 out [Pin 12]
Mobile Phone
Tx/Data out [Pin 4] T1 out [Pin 14]
Rx/Data in [Pin 3] R1 in [Pin 13]
Kapasitor yang digunakan pada rangkaian IC Max232 sebesar 1 F dengan tegangan 16
Volt pada beberapa kaki pin yaitu pada pin 1 (+) dengan pin 3 (-), pin 4 (+) dengan pin 5
(-), pin 2 (+) dengan pin 16 (-). Untuk pin 6, karena bertegangan -10 Volt maka terhubung
dengan kaki kapasitor (-) dan Ground (+). Penggunaan nilai kapasitor disesuaikan dengan
datasheet IC MAX232. IC ini memerlukan tegangan masukan sebesar +5 Volt.
Gambar 3.2 Rangkaian IC MAX232 dengan Mikrokontroler dan Mobile Phone
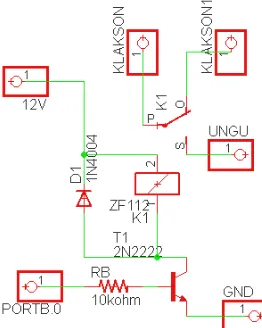
3.3
Perancangan Rangkaian Pengendali Alarm
Rangkaian pengendali alarm dapat dibagi menjadi dua yaitu menggunakan sensor
kunci kontak dan sensor PIR. Kedua sensor tersebut akan memberi masukan ke
mikrokontroler AtMega8535 untuk membunyikan alarm yang berupa klakson dan
mengirim SMSberupa informasi lokasi sepeda motor ke mobile phone user.
Sensor kunci kontak bekerja ketika terjadi kasus pencurian dengan modus memutar
kunci kontak. Gambar 3.3 menunjukkan rangkaian pengendali alarm sensor kunci kontak
yang menghubungkan socket kunci kontak dan sistem kelistrikan motor. Mikrokontroler
akan mendeteksi keluaran dari rangkaian pengendali sensor kunci kontak. Pada mode
normal, jika kunci kontak dihidupkan, maka akan mengalir arus dari aki 12V menuju
kelistrikan motor. Sedangkan ketika user mengaktifkan mode ‘ALARM’, maka arus dari
aki 12V akan mengalir menuju rangkaian pengendali alarm dan memberi input data untuk
mikrokontroler.
Gambar 3.3. Sistem Kelistrikan Alarm Kunci Kontak Sepeda Motor
Gambar 3.4 menunjukkan prinsip kerja dari rangkaian pengendali alarm sensor
kunci kontak yang menggunakan relay DC 12V/5 pole untuk memutus dan menyambung
hubungan listrik. Ketika user mengaktifkan rangkaian pengendali alarm, maka
mikrokontroler akan memberi perintah aktif sehingga port B1 memiliki tegangan 5V yang
membuat transistor 2N2222 dalam kondisi saturasi. Selanjutnya, kumparan magnetik pada
relay akan bereaksi sehingga menghubungkan pin pada kelistrikan motor dengan pin pada
mikrokontroler. Kondisi ini membuat rangkaian pengendali alarm sensor kunci kontak
mampu mendeteksi adanya tanda bahaya. Jika ada yang memutar kunci kontak saat alarm
dalam kondisi aktif, maka arus akan mengalir menuju rangkaian pengendali alarm sensor
mikrokontroler. Sinyal teg
untuk membunyikan klakso
Gambar 3.4.
Gambar 3.4 mempe
alarm sensor kunci kontak.
400 sehingga dengan men
sebagai berikut :
ICsat
Transistor 2N2222 memil
persamaan 2.5, nilai arus
berikut :
IBmin
Nilai tegangan output dari p
VBB, sehingga besarnya nil
persamaan 2.3 sebagai berik
RB =
tegangan masukan ini yang akan diproses ol
son dan mengirim SMS ke mobile phone user.
. Rangkaian Pengendali Alarm Sensor Kun
perlihatkan perancangan perangkat keras ran
ak. Sumber tegangan relay 12V dan nilai resi
enggunakan persamaan 2.6 diperoleh nilai aru
A x V 3 10 30 400
12 = −
Ω =
iliki nilai beta DC
( )
β sebesar 100 sehis basis minimum (IBmin) diperoleh dengan pe
A x A
x 4
3
in 3 10
100 10
30 − = −
=
port mikrokontroler diketahui sebesar 5V seb
nilai resistor basis maksimum (RB) dapat dih
rikut :
Ω =
−
= − 14.333,33 10 3 7 , 0 5 4 A x V V
oleh mikrokontroler
unci Kontak
rangkaian pengendali
esitansi relay sebesar
arus kolektor saturasi
ehingga berdasarkan
perhitungan sebagai
ebagai nilai tegangan
Nilai RB dipilih sebesar 10kΩ dengan pertimbangan agar lebih mudah diperoleh di pasaran
dan agar arus basis (Ib) yang dihasilkan lebih besar dari batas minimumnya[13]. Oleh
karena itu, nilai arus basis yang diperoleh dengan persamaan 2.3 sebagai berikut :
A x V
V
IB 4.3 10 4
10000 7 . 0
5 −
= Ω − =
Penambahan rangkaian regulator tegangan untuk menyesuaikan tegangan aki motor 12V
dengan tegangan mikrokontroler. Pembahasan tentang perancangan regulator tegangan IC
7805 ada di bab 3.4.
3.3.2
Rangkaian Pengendali Alarm Menggunakan Sensor PIR
Sensor AMN12111 akan menghasilkan output high saat terdeteksi adanya gerakan
manusia dalam jangkauan maksimum 2 meter dan output low saat tidak terdeteksi adanya
gerakan manusia. Oleh karena itu, jika diaplikasikan sebagai alarm sepeda motor, maka dibatasi jarak jangkauan untuk mengurangi tingkat sensitivitas alarm dengan cara memberi
kertas pelindung pada sensor sehingga yang terdeteksi hanya pancaran infrared dalam
jangkauan maksimum 15cm. Sensor akan diletakkan di stang kemudi kendaraan sepeda
motor dan jika terdeteksi ada gerakan manusia disekitar sensor, maka alarm akan berbunyi
secara otomatis.
Sumber tegangan sensor sebesar 5V. Output dari sensor akan dihubungkan dengan
PortD.2 pada mikrokontroler. Prinsip kerja dari rangkaian sensor ini adalah ketika
terdeteksi adanya gerakan manusia, maka output sensor akan menghasilkan tegangan
sebesar 4.5V. Mikrokontroler akan mengolah data input pada PortD.2 dan mengaktifkan
alarm. Rangkaian untuk sensor AMN12111 ditunjukkan oleh Gambar 3.5.
3.3.3
Perancangan Rangkaian Sirine Klakson
Mikrokontroler AtMega8535 akan memproses seluruh sensor sistem keamanan.
Oleh karena itu, sistem keamanan membutuhkan suatu tanda alarm berupa bunyi sirene
yang dapat dikendalikan oleh mikrokontroler. Sistem kerja sirene klakson yaitu akan aktif
saat ada input masukan dari mikrokontroler yang membuat transistor 2N2222 menjadi
saturasi sehingga relay akan mengaktifkan klakson. Gambar 3.6 menunjukkan rangkaian
sirine klakson. Perhitungan nilai resistor seperti pada sub bab 3.3.1.
Gambar 3.6. Rangkaian Sirene Klakson
3.4
Perancangan Regulator Tegangan IC 7805
Sistem kelistrikan sepeda motor memperoleh sumber tegangan dari aki 12V,
sedangkan sumber tegangan mikrokontroler hanya membutuhkan tegangan sebesar 5V.
Oleh karena itu, regulator tegangan digunakan untuk mengubah tegangan 12V menjadi 5V.
Regulator tegangan dalam perancangan menggunakan IC 7805 yang menghasilkan
tegangan keluaran sebesar 5V dan membutuhkan tegangan masukan minimum IC7805
yaitu sebesar 7,3V. Nilai kapasitor C1 dan C2 disesuaikan dengan datasheet yaitu sebesar
Gambar 3.7. Rangkaian Regulator Tegangan
3.5
Perancangan Keypad 4x4
Keypad 4x4 berfungsi untuk mencegah terjadinya error sistem pengendalian dan
keamanan sepeda motor ketika berada di lokasi yang tidak terjangkau sinyal operator.
User akan memasukan password melalui keypad 4x4. Jika password benar, maka sepeda
motor dapat diaktifkan seperti kondisi normal. Mikrokontroler AtMega8535 akan
menggunakan port C untuk mengendalikan masukan keypad 4x4. Gambar 3.8
menunjukkan konfigurasi port C untuk keypad. Tabel 3.2 menunjukkan kombinasi
masukan nilai port C untuk setiap karakter pada keypad 4x4.
Gambar 3.8. Konfigurasi Keypad 4x4 Tabel 3.2. Kombinasi Keypad 4x4
Karakter PortC.0 Kolom1
PortC.1
Kolom2
PortC.2
Kolom3
PortC.3
Kolom4
PortC.4
Baris1
PortC.5
Baris2
PortC.6
Baris3
PortC.7
Baris4
1 1 0 0 0 1 0 0 0
2 0 1 0 0 1 0 0 0
3 0 0 1 0 1 0 0 0
COR 0 0 0 1 1 0 0 0
5 0 1 0 0 0 1 0 0
6 0 0 1 0 0 1 0 0
MEN 0 0 0 1 0 1 0 0
7 1 0 0 0 0 0 1 0
8 0 1 0 0 0 0 1 0
9 0 0 1 0 0 0 1 0
↑ 0 0 0 1 0 0 1 0
CAN 1 0 0 0 0 0 0 1
0 0 1 0 0 0 0 0 1
ENT 0 0 1 0 0 0 0 1
↓ 0 0 0 1 0 0 0 1
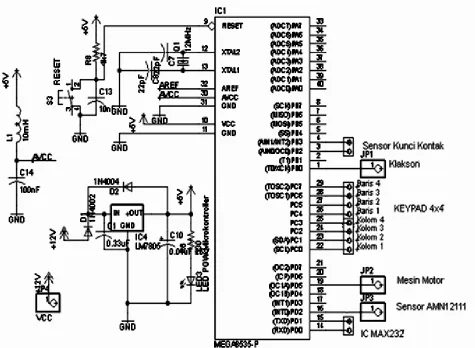
3.6
Sistem Minimum Mikrokontroler AtMega8535
Rangkaian sistem minimum berfungsi menjalankankan mikrokontroler
AtMega8535 yang telah diprogram untuk pengendalian sistem pada sepeda motor.
Mikrokontroler AtMega 8535 mengolah data input yang berasal dari sensor kunci kontak,
sensor AMN1211, keypad 4x4 dan mobile phone server Nokia 3330. Mikrokontroler
membutuhkan sistem minimum yang terdiri dari rangkaian eksternal, yaitu resistor pullup,
rangkaian osilator, dan rangkaian reset.
Mikrokontroler ATmega 8535 sudah memiliki rangkaian osilator internal (On Chip
Osilator) yang dapat digunakan sebagai sumber clock bagi CPU. Untuk dapat
menggunakan osilator internal, harus ditambahkan sebuah kristal dan dua buah kapasitor
pada pin XTAL 1 dan pin XTAL 2. Rangkaian osilator pada perancangan ini menggunakan
kristal 12 MHz dan dua buah kapasitor 22 pF seperti yang ditunjukkan oleh Gambar 3.9.
Gambar 3.9. Rangkaian Oscilator AtMega8535
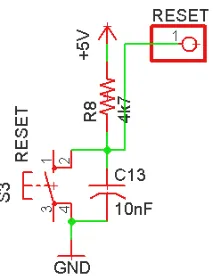
Selain itu, tersedia juga fasilitas reset yang bertujuan untuk memaksa proses kerja
pada mikrokontroler diulang dari awal. Bila tombol reset ditekan, maka pin RESET akan
mendapat input logika rendah, sehingga mikrokontroler akan mengulang proses eksekusi
Gambar 3.10. Rangkaian Reset AtMega8535
Resistor dan kapasitor digunakan untuk memperoleh waktu pengosongan kapasitor.
Waktu pengosongan kapasitor minimum sesuai dengan datasheet yaitu sebesar 2uS. Oleh
karena itu, jika menggunakan kapasitor 10nF, maka nilai resistor minimum dapat dihitung
dengan persamaan 2.1 sebagai berikut :
R =
nF uS
10 2
= 200Ω
Untuk memperoleh waktu pengosongan kapasitor lebih dari 2uS, maka nilai resistor harus
lebih besar dari 200 . Oleh karena itu, resistor yang digunakan sebesar 4700 sehingga
diperoleh waktu pengosongan kapasitor sebesar 47uS.
Secara keseluruhan gambar rangkaian minimum sistem mikrokontroler AtMega
![Tabel 2.1. Spesifikasi Telepon Selular Nokia 3330[6]](https://thumb-ap.123doks.com/thumbv2/123dok/1680206.2076487/21.595.148.458.333.536/tabel-spesifikasi-telepon-selular-nokia.webp)
![Gambar 2.1. PIN Bus Nokia 3330[6]](https://thumb-ap.123doks.com/thumbv2/123dok/1680206.2076487/22.595.221.393.70.194/gambar-pin-bus-nokia.webp)
![Gambar 2.2. Konfigurasi Pin Mikrokontroller ATmega8535[8]](https://thumb-ap.123doks.com/thumbv2/123dok/1680206.2076487/27.595.203.405.134.337/gambar-konfigurasi-pin-mikrokontroller-atmega.webp)
![Gambar 2.4. Metode Basic Positioning Cell Identification (Cell ID)[11]](https://thumb-ap.123doks.com/thumbv2/123dok/1680206.2076487/32.595.181.427.338.561/gambar-metode-basic-positioning-cell-identification-cell-id.webp)
![Gambar 2.8. Rangkaian Sistem Starter Sepeda Motor[14]](https://thumb-ap.123doks.com/thumbv2/123dok/1680206.2076487/37.595.138.474.289.682/gambar-rangkaian-sistem-starter-sepeda-motor.webp)